Заявленное техническое решение относится к системам стабилизации оптических каналов и используется для предотвращения или демпфирования колебаний линии визирования оптических каналов, применяемых в системах технического зрения подвижных носителей, таких как транспортные средства или роботизированные, в том числе беспилотные, комплексы.
Из уровня техники известна СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ (RU 2102785 C1, опубл. 20.01.1998), содержащая корпус, платформу с вертикальной осью, размещенную в подшипниках корпуса, зеркальный отражатель с горизонтальной осью, размещенный в подшипниках платформы, одноосный гироскопический стабилизатор с контуром управления, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2 1 с горизонтальной осью зеркального отражателя, датчик угла, кинематически связанный с осью зеркального отражателя, компенсатор перекрестной связи, вход которого соединен с выходом датчика угла, исполнительный двигатель, установленный по вертикальной оси платформы, первое усилительно-корректирующее устройство, выход которого подключен к исполнительному двигателю, сумматор, первый вход которого соединен с выходом компенсатора перекрестной связи, а выход с входом первого усилительно-корректирующего устройства, гироскопический чувствительный элемент, отличающаяся тем, что дополнительно введено второе усилительно-корректирующее устройство, в качестве гироскопического чувствительного элемента применен гироскоп с внутренним кардановым подвесом, жестко связанный с выходной осью одноосного гироскопического стабилизатора, при этом оси чувствительности гироскопа с внутренним кардановым подвесом расположены соосно с вертикальной осью платформы и с горизонтальной осью зеркального отражателя, первый и второй выходы гироскопа с внутренним кардановым подвесом соответственно подключены к второму усилительно-корректирующему устройству и второму входу сумматора, выход второго усилительно-корректирующего устройства подключен к входу контура управления одноосного гироскопического стабилизатора.
Недостатком данного аналога является то, что он позволяет обеспечить стабилизацию со значением среднеквадратической ошибки стабилизации на уровне 0,1 мрад (>20 угл. сек.), что является неприемлемым для применения в современных высокоточных системах технического зрения.
Также из уровня техники известна СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ (RU 2430392, опубл. 27.09.2011), содержащая элемент сравнения, на первый вход которого поступает внешний управляющий сигнал, а второй вход подключен к выходу датчика угла, причем выход элемента сравнения подключен к динамическому регулятору и интегратору, сумматор усилителя, к первому входу которого подключен выход динамического регулятора, ко второму входу подключен выход интегратора, усилитель мощности, к входу которого подключен выход сумматора усилителя, двигатель, подключенный к выходу усилителя мощности, гироприбор, связанный с двигателем и датчиком угла, оптические узлы, связанные с выходом двигателя, отличающаяся тем, что в нее дополнительно введены дифференциатор, вход которого подключен к выходу датчика угла, компаратор, вход которого подключен к выходу дифференциатора, умножитель, первый вход которого подключен к выходу дифференциатора, второй вход подключен к выходу компаратора, а третий вход подключен к выходу элемента сравнения, усилитель, вход которого подключен к выходу умножителя, сумматор, первый вход которого подключен к выходу усилителя, а второй вход подключен к выходу элемента сравнения, причем вход интегратора подключен к выходу сумматора.
Недостатком данного аналога является то, то он позволяет обеспечить стабилизацию со значением среднеквадратической ошибки стабилизации на уровне 0,1 т.д. (тысячная доля радиан, мрад) (>20 угл. сек.), что является неприемлемым для применения в современных высокоточных системах технического зрения.
Наиболее близким по технической сущности является СИСТЕМА СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ДЛЯ КАМЕРЫ (US 5897223, опубл. 27.04.1999), содержащая внутренний карданный подвес для удержания полезной нагрузки, пружинящую оболочку, содержащую внутренний карданный подвес и несущую его таким образом, чтобы внутренний карданный подвес мог совершать относительно него ограниченное угловое перемещение относительно осей тангажа, крена и рыскания, внешний карданный подвес, содержащий пружинящую оболочку и внутренний карданный подвес, и пассивный виброизолятор, соединенный между подрессоренной оболочкой и внешним карданным шарниром и имеющий два симметричных набора демпфированных спиральных пружин, расположенных на противоположных сторонах подрессоренной оболочки.
Недостатками наиболее близкого аналога является то, что он имеет сложную конструкцию, в частности применяется большое количество пружин, при этом позволяет обеспечить стабилизацию со значением среднеквадратической ошибки стабилизации на уровне 0,05 т.д. (тысячная доля радиан, мрад) (>10 угл. сек.), что является неприемлемым для применения в современных высокоточных системах технического зрения.
Задачей изобретения является устранение недостатков наиболее близкого аналога.
Техническим результатом настоящего изобретения является повышение точности стабилизации линии визирования оптических каналов (уменьшение среднеквадратической ошибки стабилизации), размещаемых на подвижных объектах, при одновременном упрощении конструкции.
Указанный технический результат достигается за счет того, что система стабилизации линии визирования оптических каналов содержащая корпус, подшипники, приводы, датчики угла, гироскопы, неподвижное основание, гиростабилизированную платформу, вилку и вычислитель, отличающаяся тем, что дополнительно содержит сферический подшипник, амортизаторы, балку и трехкоординатный моментный двигатель, установленные внутри корпуса, один из приводов закреплен на вилке и имеет соединение с неподвижным основанием через зубчатую передачу, а неподвижное основание содержит датчик угла и гироскоп.
В частности, не менее одного из датчиков угла выполнено в виде двухкоординатного датчика угла.
В частности, не менее одного из датчиков угла выполнено в виде однокоординатного датчика угла.
В частности, не менее одного из датчиков угла выполнено в виде двухкоординатного автоколлимационного датчика угла.
В частности, не менее одного из датчиков угла выполнено в виде однокоординатного автоколлимационного датчика угла.
В частности, зубчатая передача выполнена в виде редуктора.
В частности, вычислитель выполнен с возможностью получения данных от гироскопов и датчиков угла и возможностью обмена данными с трехкоординым моментным двигателем и приводами.
В частности, неподвижное основание содержит датчик угла и гироскоп.
В частности, сферический подшипник установлен между балкой и гиростабилизированной платформой.
В частности, корпус выполнен герметичным.
В частности амортизаторы представляют собой коаксиально-расположенные обоймы, скрепленные между собой упруго-демпфирующим элементом.
Краткое описание чертежей
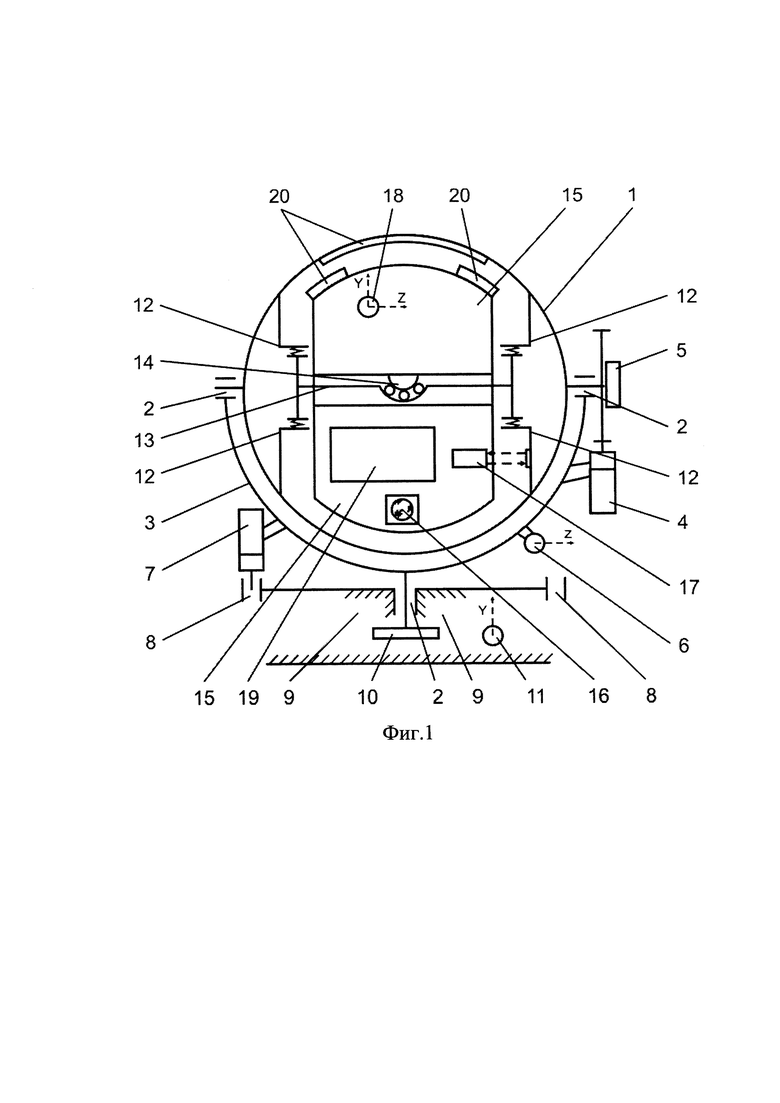
Фигура - Схематическое изображение системы стабилизации линии визирования оптических каналов.
На фигуре обозначено: 1 - корпус, 2 - подшипник, 3 - вилка, 4 - привод, 5 -датчик угла, 6 - гироскоп, 7 - привод, 8 - зубчатая передача, 9 - неподвижное основание, 10 - датчик угла, 11 - гироскоп, 12 - амортизатор, 13 - балка, 14 - сферический подшипник, 15 - гиростабилизированная платформа, 16 - двухкоординатый датчик угла, 17 - однокоординатный датчик угла, 18 - двухосевой гироскоп, 19 - вычислитель, 20 - трехкоординатный моментный двигатель.
Осуществление изобретения
Система стабилизации линии визирования оптических каналов, содержит выполненный герметичным корпус 1, который через подшипники 2, установлен на вилку 3, на вилке 3 жестко, например, с помощью болтового соединения закреплены привод 4, выполненный с возможностью обеспечения вращения корпуса 1 по оси Z, датчик угла 5, выполненный с возможностью определения углового отклонения корпуса 1 по оси Z, гироскоп 6, выполненный с возможностью определения угловой скорости вращения корпуса 1 по оси Z, привод 7, выполненный с возможностью обеспечения вращения вилки 3 по оси Y, при этом одна часть привода 7 жестко закреплена на вилке 3, например, с помощью болтового соединения, а друга часть привода 7 через зубчатую передачу 8, выполненную, например, в виде редуктора, соединена с неподвижным основанием 9, выполненным с возможностью крепления, подключения, и передачи данных системы стабилизации оптических каналов с подсистемами носителя, ось вращения по оси Y (на фиг. не обозначена) вилки 3 через подшипник 2 установлена в неподвижное основание 9, на котором, жестко например, с помощью болтового соединения закреплен датчик угла 10, выполненный с возможностью определения углового отклонения вилки 3 по оси Y, гироскоп 11, выполненный с возможностью определения угловой скорости носителя по оси Y, при этом внутри корпуса 1 через амортизаторы 12, выполненные с возможностью снижения или полного подавления высокочастотных вибраций носителя, установлена балка 13, на которую через сферический подшипник 14 установлена гиростабилизированная платформа 15, выполненная с возможностью закрепления на ней оптических каналов, линию визирования которых требуется стабилизировать с помощью заявленной системы стабилизации линии визирования оптических каналов, при этом в состав гиростабилизированной платформы 15 входят двухкоординатый 16 и однокоординатный 17 датчики угла, выполненные например, в виде соответствующих автоколлимационных датчиков угла, двухосевой гироскоп 18, и вычислитель 19, выполненный с возможностью получения данных от гироскопа 6, гироскопа 11, двухосевого гироскопа 18, датчика угла 5, датчика угла 10, двухкоординатного датчика угла 16 и однокоординатного датчика угла 17, а также обмена данными через усилители мощности (на фигурах не обозначены) с трехкоординым моментным двигателем 20, приводом 4 и приводом 7, при этом снаружи гиростабилизированной платформы 15 жестко, например, с помощью болтового соединения установлена первая часть (на фигурах не обозначена) трехкоординого моментного двигателя 20, а вторая часть (на фигурах не обозначена) трехкоординого моментного двигателя 20 жестко, например, с помощью болтового соединения установлена на внутреннюю поверхность корпуса 1.
Применение в составе системы стабилизации линии визирования оптических каналов сферического подшипника 14 позволяет отказаться от применения в конструкции ряда пружин при этом обеспечить стабильное снижение уровня вибрационных нагрузок на гиростабилизированную платформу 15 во время работы носителя, что позволяет упростить конструкцию изделия, а также повысить точность стабилизации линии визирования оптических каналов в целом.
Применение в составе системы стабилизации линии визирования оптических каналов амортизаторов 12, выполненных, например, в виде коаксиально-расположенных обойм, скрепленных между собой упругодемпфирующим элементом, позволяет отказаться от применения в конструкции ряда пружин, что позволяет упростить конструкцию изделия, упростить монтаж и повысить надежность работы системы независимо от уровня вибрационных нагрузок для широкого ряда диапазонов температур. Кроме того, демпфирующий элемент, выполненный, например, в виде прокладки из полимерного материала, входящий в состав амортизаторов 12 позволяет снизить уровень вибрационных нагрузок на сферический подшипник 15, что позволяет повысить точность стабилизации линии визирования оптических каналов в целом.
Применение в составе системы стабилизации линии визирования оптических каналов балки 13 позволяет обеспечить возможность применения в системе стабилизации линии визирования оптических каналов сферического подшипника 14, при этом обеспечить надежную связь между амортизаторами 12 и сферическим подшипником 14, что упрощает конструкцию и повышает надежность системы стабилизации линии визирования оптических каналов в целом.
Применение в составе системы стабилизации линии визирования трехкоординатного моментного двигателя 20, первая часть (на фигурах не обозначена) которого установлена снаружи гиростабилизированной платформы 15, а вторая часть (на фигурах не обозначена) которого установлена на внутреннюю поверхность корпуса 1 позволяет в режиме реального времени корректировать положение гиростабилизированной платформы 15 относительно корпуса 1, значительно снижая уровень остаточных вибраций, поступающих на гиростабилизированную платформу 15 через сферический подшипник 14, что значительно повышает точность стабилизации линии визирования оптических каналов в целом.
Соединение привода 7, часть которого жестко закреплена на вилке 3, например, с помощью болтового соединения, а другая часть которого соединена с неподвижным основанием 9 через зубчатую передачу 8, позволяет упростить конструкцию и монтаж изделия, а также осуществлять в режиме реального времени управление положением вилки 3 относительно неподвижного основания 9, жестко, например, с помощью болтового соединения, закрепленного на носителе, обеспечивать сохранение положения линии визирования в заданной точке и снижать уровень ряда вибрационных нагрузок, поступающих на вилку 3 во время движения носителя, что повышает точность стабилизации линии визирования оптических каналов в целом.
Выполнение зубчатой передачи 8 в виде редуктора позволяет снизить требования к параметрам изготовления неподвижного основания 9, определяемым с учетом параметров применяемого в конкретном изделии привода 7, что позволяет упростить конструкцию, а также обеспечить в ряде случаев более эффективное корректирование положения вилки 3 относительно неподвижного основания 9, что повышает точность стабилизации линии визирования оптических каналов в целом.
Выполнение вычислителя 19 с возможностью получения данных от гироскопа 6, гироскопа 11, двухосевого гироскопа 18, датчика угла 5, датчика угла 10, двухкоординатного датчика угла 16 и однокоординатного датчика угла 17, а также обмена данными через усилители мощности (на фигурах не обозначены) с трехкоординым моментным двигателем 20, приводом 4 и приводом 7, позволяет в режиме реального времени получать высокоточные данные об изменении положения гиростабилизированной платформы 15 и уровне вибрационных нагрузок в трех взаимно-ортогональных плоскостях, воздействующих на элементы системы стабилизации линии визирования оптических каналов, при этом одновременно производить автоматический расчет параметров, необходимых для уменьшения среднеквадратической ошибки стабилизации оптических каналов и осуществлять оперативное автоматическое управление трехкоординым моментным двигателем 20, приводом 4 и приводом 7, направленное на повышение точности стабилизации гиростабилизированной платформы 15 и линии визирования оптических каналов, установленных на гиростабилизированной платформе 15 в целом.
Размещение на неподвижном основании 9 датчика угла 10 и гироскопа 11 позволяет более эффективно использовать объем, занимаемый системой стабилизации оптических каналов, и отказаться от размещения датчика угла 10 и гироскопа 11 на других элементах системы стабилизации оптических каналов, значительно упростив конструкцию таких элементов, в частности, упростить конструкцию вилки 3.
Выполнение корпуса 1 герметичным позволяет увеличить срок службы сферического подшипника 15, амортизаторов 12, двухкоординатного датчика угла 16 и однокоординатного датчика угла 17 за счет исключения попадания на них пыли и влаги, а также исключить возможные ошибки системы, которые могут быть вызваны попаданием пыли и влаги на элементы системы стабилизации линии визирования оптических каналов, размещаемые внутри корпуса 1, что повышает точность стабилизации линии визирования оптических каналов в целом.
Использование однокоординатных 17 и двухкоординатных 16 датчиков угла позволяет применять в составе системы стабилизации линии визирования оптических каналов вычислители 19 определенной конфигурации, что в целом упрощает конструкцию системы стабилизации линии визирования оптических каналов, при этом выполнение таких датчиков в виде соответствующих автоколлимационных датчиков угла позволят повысить скорость и точность измерений, что в свою очередь повышает точность стабилизации линии визирования оптических каналов в целом.
Выполнение амортизаторов 12 в виде коаксиально-расположенных обойм, скрепленных между собой упруго-демпфирующим элементом позволяет упростить размещение амортизаторов 12 внутри корпуса 1, что в целом снижает требования к корпусу 1 и упрощает конструкцию системы стабилизации линии визирования оптических каналов, при этом такая конструкция амортизаторов 12 позволяет эффективно демпфировать колебания, поступающие на корпус 1, что повышает точность стабилизации линии визирования оптических каналов в целом.
В целях проведения сравнительных испытаний был изготовлен образец системы стабилизации линии визирования оптических каналов, содержащий выполненный герметичным корпус 1, который через подшипники 2 установлен на вилку 3, на вилке 3 жестко с помощью болтового соединения закреплены привод 4, выполненный с возможностью обеспечения вращения корпуса 1 по оси Z, датчик угла 5, выполненный с возможностью определения углового отклонения корпуса 1 по оси Z, гироскоп 6, выполненный с возможностью определения угловой скорости вращения корпуса 1 по оси Z, привод 7, выполненный с возможностью обеспечения вращения вилки 3 по оси Y, при этом одна часть привода 7 жестко с помощью болтового соединения закреплена на вилке 3, а друга часть привода 7 через зубчатую передачу 8, выполненную в виде редуктора, соединена с неподвижным основанием 9, выполненным с возможностью крепления, подключения, и передачи данных системы стабилизации оптических каналов с подсистемами носителя, ось вращения по оси Y (на фигурах не обозначена) вилки 3 через подшипник 2 установлена в неподвижное основание 9, на котором, жестко с помощью болтового соединения закреплен датчик угла 10, выполненный с возможностью определения углового отклонения вилки 3 по оси Y, гироскоп 11, выполненный с возможностью определения угловой скорости носителя по оси Y, при этом внутри корпуса 1 через амортизаторы 12, выполненные с возможностью снижения или полного подавления высокочастотных вибраций носителя, установлена балка 13, на которую через сферический подшипник 14 установлена гиростабилизированная платформа 15, выполненная с возможностью закрепления на ней оптических каналов, линию визирования которых требуется стабилизировать с помощью заявленной системы стабилизации, при этом в состав гиростабилизированной платформы 15 входят двухкоординатый 16 и однокоординатный 17 датчики угла, выполненные в виде соответствующих автоколлимационных датчиков угла, двухосевой гироскоп 18, и вычислитель 19, выполненный с возможностью получения данных от гироскопа 6, гироскопа 11, двухосевого гироскопа 18, датчика угла 5, датчика угла 10, двухкоординатного датчика угла 16 и однокоординатного датчика угла 17, а также обмена данными через усилители мощности (на фигурах не обозначены) с трехкоординым моментным двигателем 20, приводом 4 и приводом 7, при этом снаружи гиростабилизированной платформы 15 жестко с помощью болтового соединения установлена первая часть (на фигурах не обозначена) трехкоординого моментного двигателя 20, а вторая часть (на фигурах не обозначена) трехкоординого моментного двигателя 20 жестко с помощью болтового соединения установлена на внутреннюю поверхность корпуса 1.
Заявленная система стабилизации используется в работе следующим образом:
На гиростабилизированной платформе 15 закрепляют оптические каналы, линию визирования которых требуется стабилизировать, осуществляют их регулировку и настройку, осуществляют проверку герметичности корпуса 1. После этого неподвижное основание 9 закрепляют на носителе, при этом подключают систему стабилизации оптических каналов к подсистемам носителя, в частности к системам питания и системам управления передачи и обработки данных носителя. После чего носитель приводят в действие и, наблюдая за объектом, включают систему стабилизации, демпфирующую вибрации, поступающие, например, от подсистем носителя на оптические каналы. После окончания наблюдения за объектом систему стабилизации выключают.
По результатам сравнительных испытаний получили величину ошибки стабилизации для заявленной системы на 30% меньше, чем у ближайшего аналога (по патенту US 5897223, опубл. 27.04.1999). При этом конструкция заявленной системы стабилизации оптических каналов реализована без использования пружин, что свидетельствует об упрощении конструкции в целом.
Таким образам, проведенными испытаниями подтверждено достижение заявленного технического результата, а именно повышение точности стабилизации линии визирования оптических каналов (уменьшение среднеквадратической ошибки стабилизации), при одновременном упрощении конструкции.
Изготовление заявленной системы стабилизации осуществляется в промышленных условиях с использованием стандартного оборудования и доступных современных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2021 |
|
RU2785798C1 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| Оптико-электронный прибор целеуказания | 2024 |
|
RU2840051C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ГИРОСКОПИЧЕСКОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2018 |
|
RU2693561C1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
Изобретение относится к системам стабилизации линии визирования и применяется для демпфирования колебаний линии визирования оптических каналов. Сущность предлагаемого технического решения заключается в том, что в конструкцию системы стабилизации линии визирования оптических каналов дополнительно введены: сферический подшипник, амортизаторы, балка, трехкоординатный моментный двигатель. При этом один из приводов системы закреплен на вилке и имеет соединение с неподвижным основанием через зубчатую передачу, выполненную в виде редуктора. При этом неподвижное основание содержит: датчик угла, выполненный с возможностью определения углового отклонения вилки по оси Y; гироскоп, выполненный с возможностью определения угловой скорости носителя по оси Y. Техническим результатом изобретения является повышение точности стабилизации линии визирования оптических каналов при одновременном упрощении конструкции. 1 з.п. ф-лы, 1 ил.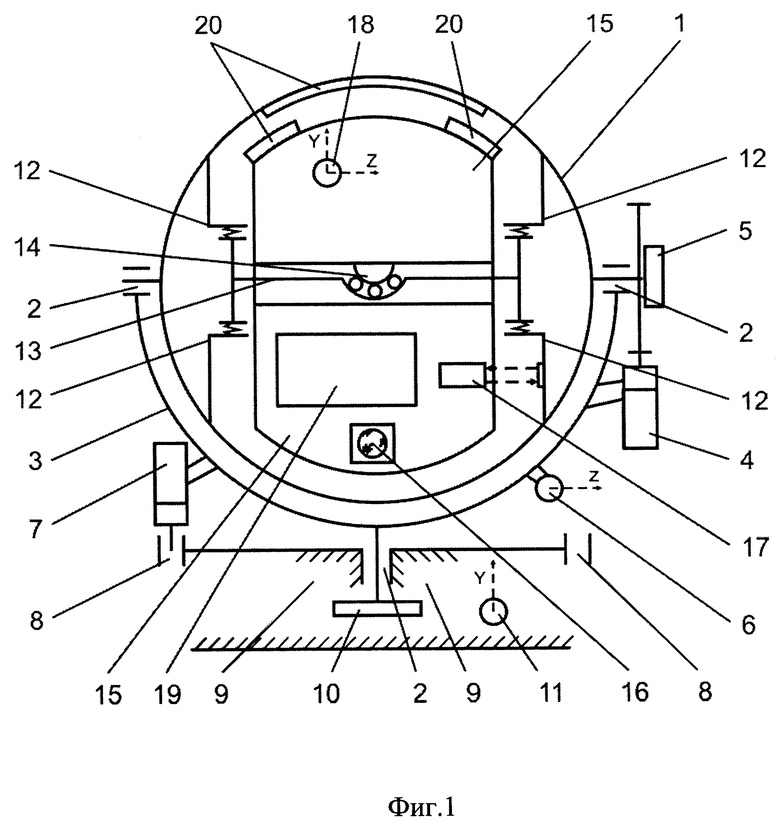
1. Система стабилизации линии визирования оптических каналов, содержащая корпус, подшипники, приводы, датчики угла, гироскопы, неподвижное основание, гиростабилизированную платформу, вилку и вычислитель, отличающаяся тем, что дополнительно содержит сферический подшипник, амортизаторы, выполненные в виде коаксиально-расположенных обойм, скрепленных между собой упруго-демпфирующим элементом, балку и трехкоординатный моментный двигатель, установленные внутри корпуса, причем один из приводов закреплен на вилке и соединен с неподвижным основанием через зубчатую передачу, выполненную в виде редуктора, при этом корпус выполнен герметичным, а вычислитель выполнен с возможностью получения данных от гироскопов и датчиков угла и возможностью обмена данными с трехкоординатным моментным двигателем и приводами, причем не менее одного из датчиков угла выполнено в виде однокоординатного автоколлимационного датчика угла или двухкоординатного автоколлимационного датчика угла.
2. Система стабилизации по п. 1, отличающаяся тем, что сферический подшипник установлен между балкой и гиростабилизированной платформой.
| US 5897223 A1, 27.04.1999 | |||
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2010 |
|
RU2430392C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |

