Изобретение относится к транспортной технике и может быть использовано в автомобилях и других транспортных средствах.
Известен способ управления процессом экстренного торможения, заключающийся в том, что измеряют параметр вращения затормаживаемого колеса, в соответствии с которым модулируют тормозной момент [1] .
Недостатком известного способа является то, что при работе устройства, реализующего этот способ, модулируется пульсирующий тормозной момент, который вызывает, во-первых, продольные колебания остова транспортного средства, приводящие к снижению комфортабельности, во-вторых, - пульсацию тормозной силы, которая лишь в очень короткие интервалы времени достигает своего максимально возможного значения, что влечет за собой увеличение тормозного пути, отрицательно сказывается на эффективности торможения.
Наиболее близким к изобретению является способ управления процессом торможения колеса транспортного средства, заключающийся в том, что измеряют действительную угловую скорость колеса, величину которой преобразуют в сигнал модулирующий тормозной момент, дополнительно определяют знак углового ускорения колеса, при изменении знака которого производят коррекцию прижимного усилия [2] .
Недостатком этого способа является то, что при работе устройств, реализующих этот способ, модулируется тормозной момент, который вызывает продольные колебания остова транспортного средства и циклическую пульсацию тормозной силы, что отрицательно сказывается на эффективности торможения.
Цель изобретения - повышение эффективности.
Указанная цель достигается тем, что в способе управления процессом экстренного торможения колеса транспортного средства, заключающемся в том, что измеряют параметры, характеризующим процесс торможения колеса, по величине которого корректируют величину прижимного усилия на тормозных колодках, в качестве параметра измеряют изменение величины тормозной силы. Одновременно измеряют величину прижимного усилия, и при достижении величиной тормозной силы максимального значения ограничивают дальнейшее увеличение прижимного усилия, а при изменении величины тормозной силы, корректируют величину прижимного усилия таким образом, чтобы отношение величин прижимного усилия и тормозной силы оставались постоянным.
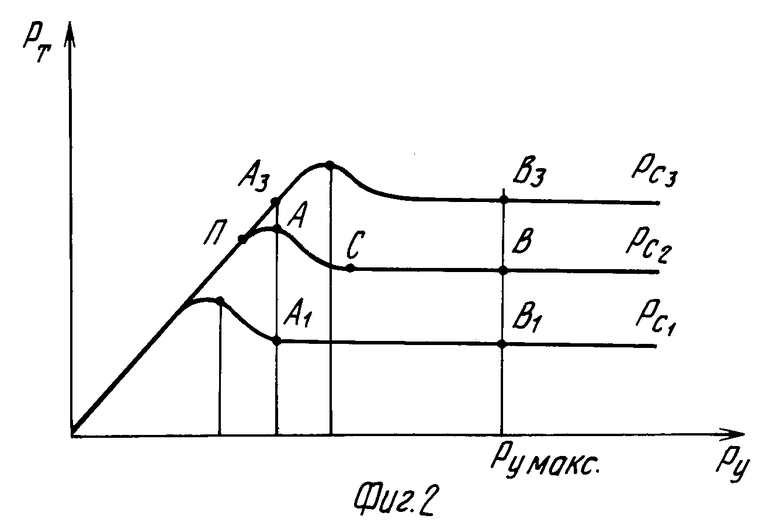
На фиг. 1 показана функциональная блок-схема устройства, выполняющего последовательность операций по предлагаемому способу; на фиг. 2 - графики зависимости тормозной силы от величины управляющего воздействия со стороны водителя на тормозную систему для трех величин силы сцепления колеса с дорогой.
Устройство для осуществления предлагаемого способа содержит датчик 1 для измерения величины тормозной силы, развиваемой затормаживаемым колесом, датчик 2 для измерения величины управляющего воздействия водителя на тормозную систему, датчик 3 для измерения величины прижимного усилия на тормозных колодках, блок 4 для обработки и сравнения сигналов датчиков, исполнительное устройство 5 для ограничения прижимного усилия, исполнительное устройство 6 для коррекции прижимного усилия.
Способ осуществляется следующим образом.
При необходимости торможения водитель оказывает управляющее воздействие на тормозную систему. При этом в тормозной магистрали поднимается давление, которое фиксируется датчик 2. Блок 4 сравнивает каждый последующий сигнал датчика 1, получая таким образом, изменение тормозной силы, и параллельно сравнивает каждый последующий сигнал датчика 2, получая изменение управляющего воздействия водителя на тормозную систему. В случае, когда тормозная сила достигнет своего максимального значения (не увеличивается при одновременно увеличивающемся управляющим воздействием водителя на тормозную систему) блок 4 генерирует управляющий сигнал для исполнительного устройства 5, которое ограничивает дальнейшее увеличение прижимного усилия на тормозных колодках колеса. Одновременно с выдачей управляющего сигнала для исполнительного устройства 5 блок 4 запоминает пороговое значение величины управляющего воздействия (сигнал датчика 2) и коэффициент отношения величин прижимного усилия (сигнал датчика 3) и тормозной силы (сигнал датчика 1), как коэффициент сравнения. Далее в процессе торможения блок 4 обрабатывает сигналы датчика 1 и в случае изменения тормозной силы за счет изменения силы сцепления колеса с дорогой генерирует управляющий сигнал для исполнительного устройства 6, которое производит коррекцию прижимного усилия таким образом, чтобы текущее значение коэффициента было равно коэффициенту сравнения. При регистрации датчиком 2 величины управляющего воздействия меньше заполненного порогового значения блок 4 генерирует управляющий сигнал для исполнительного устройства 5 на расфиксацию прижимного усилия, после чего прижимное усилие становится пропорциональным управляющему воздействию.
На фиг. 2 показаны графики зависимости тормозной силы Рт от управляющего воздействия Ру для трех величин силы сцепления колеса с дорогой соответственно Рс1, Рс2, Рс3.
Допустим, что сила сцепления колеса с дорогой в данный момент была Рс2. При отсутствии в тормозной системе устройства, ограничивающего управляющее воздействие, процесс торможения описывается графиком зависимости 2. В начале торможения тормозная сила Рт растет пропорционально управляющему воздействию Ру до момента, обозначенному на графике, точкой П. Дальнейшее увеличение тормозной силы Рт обусловлено условием сцепления колеса с дорогой. После достижения тормозной силы Рт максимума (точка А) происходит ее снижение, далее тормозная сила устанавливается (точка С), что соответствует блокировке колеса (движение юзом). Дальнейшее увеличение управляющего воздействия продолжается до Румакс (точка В). При этом увеличения тормозной силы не происходит. При изменении силы сцепления колеса с дорогой процесс переходит по прямой В1В3. При наличии в тормозной системе устройства, реализующего данный способ, при достижении тормозной силой максимума (точка А), устройство 6 ограничивает дальнейшее увеличение прижимного усилия, получая, таким образом, максимально возможную для данного коэффициента сцепления колеса с дорогой тормозную силу Рт.
Допустим, что в момент ограничения прижимного усилия сила сцепления была Рс2, далее в процессе торможения сила сцепления изменилась, и стала Рс1. Величина тормозного усилия переместилась на графике из точки А в точку А1. Для достижения максимального значения тормозной силы устройство 6 уменьшает величину прижимного усилия до получения коэффициента сравнения.
Если величина тормозного усилия переместилась в точку А3, что соответствует силе сцепления Рс3, для достижения максимального значения тормозной силы устройство 6 увеличит прижимное усилие до получения коэффициента сравнения.
Таким образом, при данном способе управления процессом экстренного торможения достигается повышение эффективности торможения путем получения стабильной максимальной тормозной силы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2103191C1 |
| Система экстренного торможения для беспилотных автомобилей с электроприводом | 2019 |
|
RU2735186C1 |
| Вариатор торможения по фактическому сцеплению колеса и дороги | 1991 |
|
SU1794124A3 |
| ИСПОЛНИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2561662C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ РАБОЧЕЙ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И ВОССТАНОВЛЕНИЯ МЕХАНИЗМА ДОРОЖНО-ТРАНСПОРТНОГО ПРОИСШЕСТВИЯ И УСТРОЙСТВО "ЧЕРНЫЙ ЯЩИК" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2519188C2 |
| Противоблокировочная пневматическая тормозная система задних колес трехосного автомобиля | 1981 |
|
SU962057A1 |
| СПОСОБ КОНТРОЛЯ НЕРАВНОМЕРНОСТИ СРАБАТЫВАНИЯ ТОРМОЗОВ АВТОМОБИЛЯ | 1996 |
|
RU2116212C1 |
| РЕГУЛЯТОР СКОРОСТИ КОЛЕСА ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2065367C1 |
| СПОСОБ ЭКСТРЕННОГО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2604369C2 |
Использование: в тормозных системах. Сущность изобретения: при торможении блок 4 обрабатывает сигналы датчика 1 посредством сравнения каждого последующего сигнала с предыдущим. Когда тормозная сила достигнет максимума, блок 4 выдает управляющий сигнал для устройства 5, которое ограничивает дальнейший рост прижимного усилия на тормозных колодках. Одновременно блок 4 запоминает пороговое значение величины управляющего воздействия (сигнал датчика 2) и коэффициент отношения величин прижимного усилия (сигнал датчика 3) и тормозной силы (сигнал датчика 1). Далее в процессе торможения блок 4 обрабатывает сигналы датчика 1 и в случае изменения силы сцепления с дорогой генерирует в соответствии с коэффициентом сигнал для устройства 6, которое производит коррекцию прижимного усилия. При регистрации датчиком 2 величины управляющего воздействия меньше порогового значения, блок 4 генерирует сигнал для устройства 5 на расфиксацию прижимного усилия, после чего прижимное усилие становится пропорциональным управляющему воздействию. 2 ил.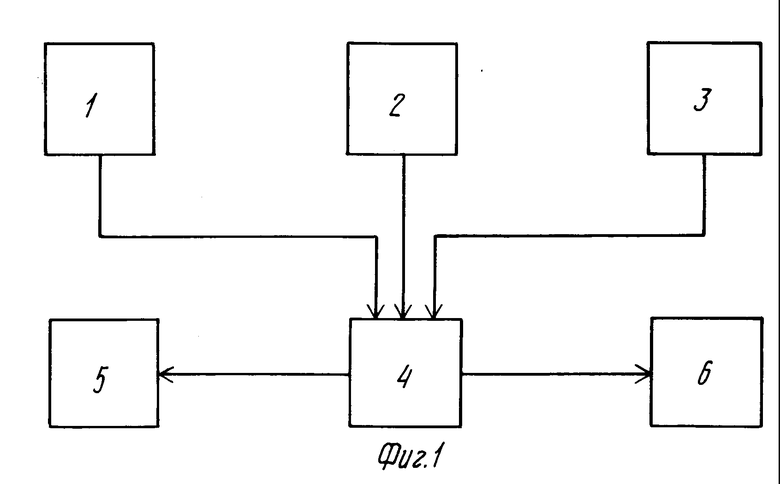
СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ЭКСТРЕННОГО ТОРМОЖЕНИЯ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА, заключающийся в том, что измеряют параметр, характеризующий процесс торможения колеса, по величине которого корректируют величину прижимного усилия на тормозных колодках, отличающийся тем, что с целью повышения эффективности, в качестве параметра измеряют изменение величины тормозной силы, одновременно измеряют величину прижимного усилия и при достижении величиной тормозной силы максимального значения ограничивают дальнейшее увеличение прижимного усилия, а при изменении величины тормозной силы корректируют величину прижимного усилия так, чтобы отношение величин прижимного усилия и тормозной силы оставалось постоянным.
