Изобретение относится к средствам пассивной безопасности наземного транспорта с двигателями внутреннего сгорания /ДВС/ и дизельными двигателями.
Известны способы экстренного торможения транспортных средств, заключающиеся в том, что с помощью установленного на раме аварийного тормозного механизма с силовым приводом вводят в контакт с дорожным полотном либо внедряемый в полотно шток, связанный с пиропатроном, снабженным электрозапалом /см. патент РФ на изобретение №2274566, кл. В60Т 1/14, 2004 [1]/, либо вакуумный прижим, сообщаемый с эжекторным насосом /см. патент на полезную модель №103784, кл. B60T 1/14, 2009 [2]/, либо тормозной клин с системой его подвески, снабженной рабочими барабанами с гибкими тросами, тормозной колодкой и ручной лебедкой /см. патент РФ на изобретение №2286895, кл. В60Т 1/14, 2005 [3]; патент РФ на изобретение №2276021, кл. В60Т 1/14, 2004 [4]/.
Недостатками известных способов экстренного торможения является предельная сложность используемых устройств, низкая надежность, ограниченные возможности применения.
Кроме того, известны способы экстренного торможения транспортного средства путем создания дополнительной силы, прижимающей колеса к дорожному полотну при помощи, например, принудительного изменения положения центра тяжести транспортного средства относительно дорожного полотна /см., например, патент РФ на изобретение №2279991, кл. В60Т 1/04, 2006 [5]/.
Недостатками таких способов является сложность их реализации и низкая эффективность торможения.
Известны также способы экстренного торможения транспортного средства, заключающиеся в распознавании опасных ситуаций на дороге, в частности опасных сближений с объектом, с помощью радарных датчиков и видеокамер и предупреждении столкновений путем автоматического торможения с расчетным значением необходимого тормозного усилия /см. сайт: http://www.xc60-club.ru/obzory-i-testy/collis-warn/ [6]; сайт: http://gm-avto.ucoz.ru/publ/3-1-0-4 [7]/.
Недостатками известных устройств является низкая эффективность экстренного торможения и, соответственно, низкая степень повышения безопасности транспортных средств, сложность используемых систем предупреждения столкновений.
Наиболее близким способом того же назначения к предлагаемому изобретению по совокупности существенных признаков является способ экстренного торможения транспортного средства, включающий измерение дистанции до препятствия с помощью датчиков дистанции, расчет с помощью электронного блока относительной скорости сближения и оценку вероятности столкновения с препятствием, а также при большой опасности столкновения выполнение исполнительными устройствами, связанными с электронным блоком и действующими на ведущие колеса органами управления движением и торможением, заданной последовательности операций по экстренному торможению транспортного средства и подъему передней части его кузова относительно дороги /см. патент РФ на изобретение №2257303, кл. B60R 21/02, 2003 [8]/, и принятый за прототип.
Недостатками способа-прототипа являются низкие эффективность экстренного торможения и степень повышения безопасности за счет силового подъема передней части кузова, ограниченные возможности его использования и предельная сложность реализации за счет использования специальных силовых исполнительных устройств.
Сущность изобретения заключается в создании сравнительно простого по осуществлению и эффективного способа экстренного торможения транспортного средства в чрезвычайно опасных аварийных ситуациях, использующего реверсный режим и позволяющего значительно повысить степень безопасности движения.
Технический результат - повышение эффективности торможения и степени безопасности транспортного средства, упрощение реализации способа и расширение возможностей его использования.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе экстренного торможения транспортного средства, включающем измерение дистанции до препятствия, расчет относительной скорости сближения и оценку вероятности столкновения с препятствием, а также, при большой опасности столкновения, выполнение исполнительными устройствами, связанными с действующими на ведущие колеса органами управления движением и торможением, заданной последовательности операций, особенность заключается в том, что дополнительно измеряют скорости вращения ведущих колес и движения транспортного средства относительно дорожного полотна, после чего с помощью вышеуказанных исполнительных устройств последовательно зажимают тормозные колодки, включают в момент прекращения вращения ведущих колес заднюю скорость, поднимают обороты двигателя внутреннего сгорания до заданной величины, отжимает сцепление, отпускают тормозные колодки, выключают в момент остановки транспортного средства относительно дорожного полотна реверс, сбрасывают обороты двигателя до холостых, выключают заднюю скорость и повторно зажимают тормозные колодки.
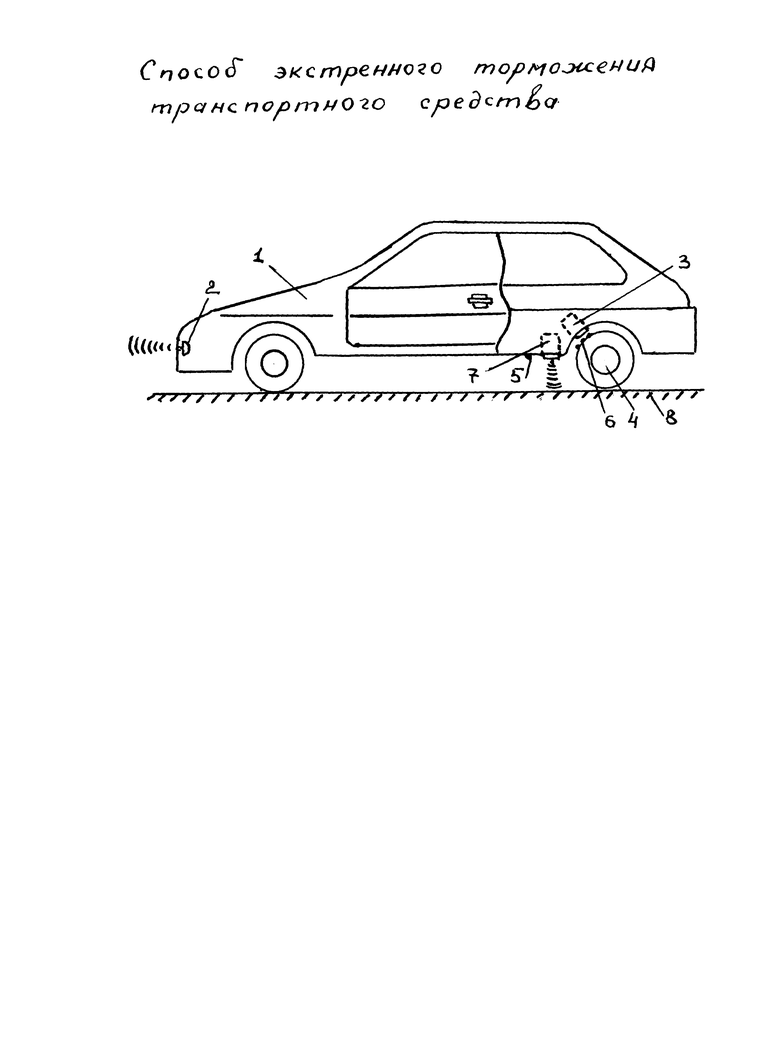
Сущность изобретения поясняется чертежом, где схематично изображено транспортное средство с вариантом устройства для реализации предлагаемого способа.
Устройство содержит размещенный в передней части транспортного средства 1 датчик 2 дистанции до препятствия /на рисунке последнее не показано/ радиолокационного или лазерного типа /см. [8]/, оптический датчик 3 скорости вращения ведущих колес 4 транспортного средства 1, например задних, установленный на нижней части рамы 5 и обращенный к рабочей поверхности колеса 4, снабженного нанесенными в поперечных канавках протектора шины специальной стойкой краской рисками 6, и оптический датчик 7 движения транспортного средства 1 относительно дорожного полотна 8, также установленный на нижней части рамы 5 и обращенный к дорожному полотну 8. При этом датчики 2, 3 и 7 подключены к электронному программируемому блоку /на рисунке не показан/, рассчитывающему на основании сигналов, снимаемых с датчика 2 дистанции до препятствия, относительную скорость сближения транспортного средства 1 с препятствием, и оценивающему вероятность столкновения с последним. В случае большой опасности столкновения электронный блок запрограммирован на выдачу исполнительным устройствам, связанным с действующими на ведущие колеса 4 органами управления движения и торможением с помощью сигналов, снимаемых с оптических датчиков 3, 7, соответственно, скорости вращения ведущих колес 4 и движения транспортного средства 1 относительно дорожного полотна 8, заданной последовательности команд: на зажатие тормозных колодок, включение в момент прекращения вращения ведущих колес 4 задней скорости /реверса/, поднятие оборотов двигателя внутреннего сгорания до заданной величины, отжатие сцепления, отпускание тормозных колодок, выключение в момент остановки транспортного средства 1 относительно дорожного полотна 8 реверса, сбрасывание оборотов двигателя до холостых, выключение задней скорости и повторное зажатие тормозных колодок.
Реализацию предлагаемого способа с помощью вышеописанного устройства осуществляют следующим образом.
Измеряют дистанцию транспортного средства 1 до препятствия с помощью датчика 2 дистанции до препятствия, рассчитывают по сигналу с датчика 2 с помощью электронного программируемого блока относительную скорость сближения и оценивают вероятность столкновения с препятствием. В случае большой опасности столкновения снимают с оптических датчиков 3, 7, соответственно, скорости вращения ведущих колес 4 и движения транспортного средства 1 относительно дорожного полотна 8, сигналы, с помощью которых формируют в программируемом электронном блоке и выдают исполнительным устройствам, связанным с действующими на ведущие колеса 4 органами управления движением и торможением, заданную последовательность команд. В соответствии с этими командами вышеуказанные исполнительные устройства производят над органами управления движением и торможением ведущих колес 4 операции в следующей последовательности: зажимают тормозные колодки, включают в момент прекращения вращения ведущих колес заднюю скорость /реверс/, поднимают обороты двигателя внутреннего сгорания до заданной величины, отжимают сцепление, отпускают тормозные колодки, выключают в момент остановки транспортного средства 1 относительно дорожного полотна 8 реверс, сбрасывают обороты двигателя до холостых, выключают заднюю скорость и повторно зажимают тормозные колодки.
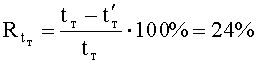
Следует подчеркнуть, что осуществление именно вышеуказанной последовательности операций над органами управления движением и торможением ведущих колес 4 позволяет принципиально изменить весь характер процесса экстренного торможения транспортных средств с ДВС и дизельными двигателями, его кинематику и динамику, увеличив за счет этого эффективность торможения без резкого усложнения конструкции и применения, специальных силовых механизмов. В известных способах экстренного торможения /см., например, [6], [7], [8]/, естественно, не оснащенных специальными дополнительными устройствами силового контактирования с дорожным полотном 8, резко усложняющими реализацию способов, процесс экстренного торможения осуществляется путем интенсивного зажатия тормозных колодок до прекращения вращения ведущих колес 4 и последующего движения транспортного средства 1 юзом по инерции до полной остановки движения относительно дорожного полотна 8. В предлагаемом же способе торможения в момент остановки вращения ведущих колес 4 обеспечивается сразу же, не дожидаясь остановки движения транспортного средства 1, относительно дорожного полотна 8, то есть в процессе его движения по инерции, после проведения ряда дополнительных промежуточных операций над органами управления движением и торможением ведущих колес 4, обусловленных спецификой работы ДВС, переключение вращения ведущих колес 4 в режим реверса с заранее заданными оборотами /угловой скоростью вращения/. В таком режиме происходит процесс одновременного торможения транспортного средства 1 как за счет трения сцепления шин с дорожным полотном 8 с коэффициентом сцепления f=0,4 /см., например, В.И. Кнороз, Е.В. Кленников "Шины и колеса", М., Машиностроение, 1975, стр. 134 [9]/ при движении транспортного средства 1 по инерции, и отсутствии вращения ведущих колес 4, так и за счет работы ДВС в режиме реверса с регулируемой силой тяги. Именно такое изменение кинематики и динамики процесса экстренного торможения позволяет повысить эффективность торможения при оптимальном реверсном режиме примерно на 25% /см. далее/.
Пример реализации способа.
Заявителем с использованием дифференциальных уравнений движения и основных теорем динамики процессов торможения /систем/ были проведены теоретические и экспериментальные исследования динамики процессов торможения с помощью известного и предлагаемого способов, проведена сравнительная оценка эффективности торможения, причем получены практически идентичные результаты при теоретических и экспериментальных методах исследований. При этом в качестве базовых использовались технико-экономические параметры и тактические параметры легкового автомобиля "Волга" /ГАЗ-24/: m=1400 кг - собственная масса в снаряженном состоянии; Vmax.=145 км/час = 40,28 м/с - максимальная скорость; Nmax. - 72 кВт - максимальная мощность двигателя; f=0,4.
Заявитель приводит далее краткие результаты исследований. В случае необходимости по требованию эксперта он готов предоставить подробное описание исследований.
Максимальная сила тяги двигателя с учетом потерь на качение и аэродинамических потерь /эти суммарные потери порядка 10%, см. [9], стр. 115/ 
При торможении предлагаемым способом определяем время торможения 



Предлагаемый способ экстренного торможения транспортного средства предельно эффективен в наиболее опасных аварийных режимах и позволяет значительно сократить время торможения и тормозной путь. Способ предельно прост по реализации, имеет широкие возможности применения, позволяет отказаться от сложных дополнительных электромеханических, гидравлических, пиротехнических и т.п. устройств, осуществляющих при экстренном торможении силовой контакт с дорожным полотном.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения безопасности транспортного средства при групповых столкновениях | 2016 |
|
RU2632238C2 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| РЕВЕРСИВНАЯ СИСТЕМА ЭКСТРЕННОГО ТОРМОЖЕНИЯ ДЛЯ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2009 |
|
RU2516419C2 |
| СИСТЕМА ЭКСТРЕННОГО ТОРМОЖЕНИЯ ДЛЯ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2009 |
|
RU2509641C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА С СИСТЕМОЙ ТОРМОЖЕНИЯ | 2009 |
|
RU2516426C2 |
| Способ предотвращения столкновений со встречным препятствием на полосе движения | 2022 |
|
RU2788652C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2534689C2 |
| СПОСОБ ПРЕВЕНТИВНОГО СМЕЩЕНИЯ ЦЕНТРА ТЯЖЕСТИ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА В СТОРОНУ ПОВОРОТА | 2020 |
|
RU2749154C1 |
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| СИСТЕМА ЭКСТРЕННОГО ТОРМОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В АВАРИЙНЫХ СИТУАЦИЯХ | 2012 |
|
RU2542811C2 |
Изобретение относится к области автомобилестроения, в частности к системам пассивной безопасности наземного транспорта. Способ заключается в измерении дистанции транспортного средства до препятствия с помощью датчика дистанции. Затем рассчитывают с помощью электронного программируемого блока относительную скорость сближения и оценивают вероятность столкновения. В случае возникновения опасности столкновения снимают с оптических датчиков соответственно скорости вращения ведущих колес и движения транспортного средства относительно дорожного полотна сигналы, с помощью которых формируют в электронном блоке и выдают исполнительным устройствам последовательность команд на проведение операций: зажатие тормозных колодок, включение задней скорости, поднятие оборотов двигателя, отжатие сцепления, отпускание тормозных колодок, выключение в момент остановки транспортного средства реверса, сбрасывание оборотов двигателя до холостых, выключение задней скорости и повторное зажатие тормозных колодок. Достигается повышение эффективности торможения и безопасность транспортного средства. 1 ил.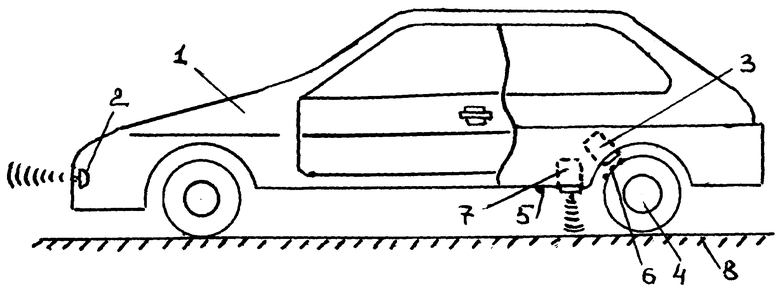
Способ экстренного торможения транспортного средства, включающий измерение дистанции до препятствия, расчет относительной скорости сближения и оценку вероятности столкновения с препятствием, а также, при большой опасности столкновения, выполнение исполнительными устройствами, связанными с действующими на ведущие колеса органами управления движением и торможением, заданной последовательности операций, отличающийся тем, что дополнительно измеряют скорости вращения ведущих колес и движения транспортного средства относительно дорожного полотна, после чего с помощью вышеуказанных исполнительных устройств последовательно зажимают тормозные колодки, включают в момент прекращения вращения ведущих колес заднюю скорость, поднимают обороты двигателя внутреннего сгорания до заданной величины, отжимают сцепление, отпускают тормозные колодки, выключают в момент остановки транспортного средства относительно дорожного полотна реверс, сбрасывают обороты двигателя до холостых, выключают заднюю скорость и повторно зажимают тормозные колодки.
| "Эксплуатация автомобиля Touareg", гл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Системы поддержки водителя, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| СИСТЕМА ЭКСТРЕННОГО ТОРМОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В АВАРИЙНЫХ СИТУАЦИЯХ | 2012 |
|
RU2542811C2 |
| БЕЗОПАСНЫЙ ЛЕГКОВОЙ АВТОМОБИЛЬ | 2003 |
|
RU2257303C1 |
| УСТРОЙСТВО КОНТРОЛЯ ДИСТАНЦИЙ АВТОМОБИЛЯ ДО ПРЕПЯТСТВИЙ | 2010 |
|
RU2425765C1 |
| US 5027104 A, 25.06.1991. | |||

