Изобретение относится к железнодорожной автоматике и может быть использовано в автоматических системах технической диагностики подвижного состава на ходу поезда.
Известно устройство для счета вагонов, содержащее датчики прохода колес, формирователи импульсов, реверсивные счетчики базы вагона, управляющие устройства и счетчик вагонов. Счетчик набегающих (сбегающих) осей считывает нарастающим итогом количество осей первой половины вагона, проходящих над первым (последним) датчиком, затем переключается на вычитание и после прохода последней оси вагона, обнуляясь, вырабатывает отметку вагона. Реверсивный счетчик базы считает количество осей, находящихся в данный момент между первым и последним датчиком. При проходе половины вагона счетчик базы обнуляется, формируя сигнал, переключающий счетчики набегающих и сбегающих осей в режим вычитания. Для обеспечения такой работы датчики размещены на расстоянии друг от друга 3,6 м, большем расстояния между осями одной тележки и меньшем расстоянии между осями соседних тележек. Недостаток такого устройства заключается в том, что оно дает сбои в распознавании и счете вагонов при несоответствии какого-либо расстояния между осями принятому условию, а также при нечетном числе осей (например, некоторые типы локомотивов, дрезины, специальные вагоны).
Наиболее близким по технической сущности является устройство для счет подвижных единиц, содержащее путевые датчики, один из которых подключен к блоку фиксации направления движения подвижной единицы, содержащему триггер, блок определения осности, элементы И и ИЛИ, коммутаторы и регистратор проследования подвижных единиц, имеющий элемент фиксации признака подвижной единицы и связанный одним входом с блоком фиксации направления движения подвижной единицы.
Распознавание локомотива и осности вагонов жестко связано с размещением трех датчиков, и при нарушении принятых предложений о межосных расстояниях (например при наличии в поезде специальных вагонов) произойдет сбой счета. Кроме того, такое устройство распознает только осность вагонов, но не позволяет различать подвижные единицы по типоразмерам при одинаковой осности, что затрудняет идентификацию поездов при централизованном контроле и управлении движением.
Цель изобретения - повышение точности счета и распознавание типоразмера вагона при одновременном сокращении количества датчиков.
Сущность изобретения заключается в том, что устройство для счета подвижных единиц, содержащее путевые датчики, один из которых подключен к блоку фиксации направления движения подвижной единицы, блок определения осности, элементы ИЛИ и И, коммутаторы и регистратор проследования подвижных единиц, имеющий элемент фиксации признака подвижной единицы и связанный одним входом с блоком фиксации направления движения подвижной единицы, снабжено дополнительными блоками определения осности и элементами ИЛИ, блоком измерения межосных расстояний, сумматорами, формирователями импульсов, регистрами, блоком развязки, блоком задержки, дополнительным блоком фиксации направления движения подвижной единицы, вход которого подключен к другому путевому датчику, а первый выход - к первому входу блока определения межосных расстояний и входу блока задержки, выходы которого соединены с входами записи регистров. Выход блока определения межосных расстояний подключен к информационному входу первого регистра. Третий вход соединен с выходом первого формирователя импульсов, соединенным с одним входом элемента ИЛИ первыми входами блоков определения осности и вторым входом регистратора проследования подвижной единицы, третьи входы которого подключены к выходам блока развязки, входы которого соединены с первыми выходами блоков определения осности, вторые выходы которых соединены с входами второго элемента ИЛИ, выход которого подключен к входу второго формирователя импульсов, выход которого соединен с четвертым входом регистратора проследования подвижной единицы, третьи выходы блоков определения осности соединены с входами третьего элемента ИЛИ, выход которого подключен к пятому входу регистратора проследования подвижной единицы и одному из входов четвертого элемента ИЛИ, четвертый выход первого блок определения осности соединен с входом управления первого коммутатора, первый и второй выходы которого подключены соответственно ко вторым и третьему входам второго блока определения осности, четвертый выход которого соединен с входом управления второго коммутатора, первые и вторые выходы которого подключены соответственно ко вторым и третьим входам третьего блока определения осности, а информационный вход - к выходу первого сумматора, один вход которого соединен с выходом первого регистра, а второй - с соединенным с информационным входом первого коммутатора выходом второго сумматоа, входы которого подключены к выходам второго, третьего и четвертого регистров, входы сброса которых соединены с выходом первого элемента ИЛИ, второй вход которого подключен к выходу второго формирователя импульсов. Выходы четвертого регистра подключены к пятому элементу ИЛИ, выходом подключенному к первому входу третьего формирователя импульсов, второй вход которого соединен с выходом четвертого формирователя импульсов, входом подключенного к выходу четвертого элемента ИЛИ, а выход третьего формирователя подключен к одному входу элемента И, другим входом подключенному к одному из генераторов импульсов, а выходом - к третьему входу первого блока определения осности и вторым, управляющим входам коммутатора.
Блок определения межосных расстояний имеет счетчики импульсов, элеметы задержки, ключевые элементы, элементы ИЛИ, коммутатор, триггер, регистр и формирователь кода межосного расстояния, одни входы которого подключены к выходам коммутатора, одними входами соединенного с выходами одного из счетчиков импульсов, а другие входы - к выходам регистра, информационные входы которого соединены с выходами другого счетчика импульсов, вход сброса которого соединен с выходом одного из элементов ИЛИ, одним входом подключенного к выходу одного из элементов задержки, тактовый вход - с выходом элемента И, одним из входов подключенного к выходу триггера, входы сброса и установки в единичное состояние которого подключены соответственно к выходам одного и другого ключевых элементов, а вход сброса первого счетчика подключен к выходу другого элемента ИЛИ, одним из входов подключенного к выходу другого элемента задержки. Выходами формирователя кода межосного расстояния образованы выходы блока, входами управления коммутатора, первым входом второго ключевого элемента и входом второго элемента задержки образован первый вход блока, третьим входом формирователя кода межосного расстояния, входом синхронизации регистра, входом первого элемента задержки и первым входом первого ключевого элемента образован второй вход блока, вторыми входами одного и другого элементов ИЛИ образован третий вход блока вторым входом элемента И и тактовыми входом первого счетчика импульсов образован четвертый рой вход блока, вторыми входами ключевых элементов образован пятый вход блока.
Блок определения осности содержит вычитатель, элементы задержки, регистры, счетчик импульсов, элемент задания единичного сигнала, элементы сравнения, элементы памяти, элементы ИЛИ, коммутатор, формирователи импульсов и ключевой элемент, один вход которого подключен к одному выходу вычитателя, соединенному с входом элемента задержки и входом разрешения записи одного регистра, а другой вход подключен к одному из входов первого элемента сравнения, вторым выходом соединенного с входом управления коммутатора и первым входом одного из элементов ИЛИ, другой вход которого подключен к первому выходу первого элемента сравнения, а выход - к входу одного из формирователей импульсов, выход которого подключен к одному из входов другого элемента ИЛИ, выход которого соединен с одним из входов вычитателя, другие выходы которого соединены с входами первого элемента памяти, выходы которого подключены к информационным входам другого регистра и первым входам второго элемента сравнения, выход которого соединен со входом другого формирователя импульсов, выход которого соединен с входом сброса второго регистра и с тактовым входом счетчика импульсов, вход сброса которого подключен к выходу элемента задержки, а выходы - к информационным входам первого регистра, выходами соединенного с первыми входами первого элемента сравнения, вторые входы которого подключены к выходу элемента задания единичного сигнала, а вход второго элемента памяти подключен к выходу коммутатора, информационные входы которого соединены с выходами второго регистра. Выходами второго элемента памяти образованы первые выходы блока, вторым выходом первого элемента сравнения образован второй выход блока, выходом ключевого элемента образован третий выход блока, третьим выходом первого элемента сравнения образован четвертый выход блока, вторыми входами второго элемента сравнения образованы вторые входы блока, другим входом вычитателя образован третий вход блока, а другим входом второго элемента ИЛИ образован первый вход блока.
Блок фиксации направления движения подвижной единицы имеет элементы сравнения, триггеры, элемент И и детектор, выход которого подключен к входу одного из элеметов сравнения, выход которого соединен с тактовым входом первого триггера, выход которого подключен к одному входу элемента И и тактовому входу второго триггера, информационный вход которого подключен к выходу второго элемента сравнения, соединенному с другим входом элемента И, выходом которого образован первый выход блока, выходом второго триггера образован второй выход блока, входами детектора и второго элемента сравнения образован первый вход блока, а входами сброса первого триггера и входами установки в единичное состояние второго триггера образован второй вход блока.
Регистратор проследования подвижной единицы снабжен счетчиками импульсов, элементом сравнения, элементом И и элементом ИЛИ, выход которого подключен к входу первого счетчика импульсов, один вход - к выходу элемента фиксации признака подвижной единицы, а другой вход - к выходу второго счетчика импульсов, вход разрешения записи и счета которого подключен к выходу элемента сравнения, одни и другие входы которого подключенны соответственно к выходам третьего и четвертого счетчиков, вход разрешения счета последнего из которых подключен к выходу элемента И, один вход которого подключен к выходу элемента сравнения, при этом тактовыми входами второго, третьего и четвертого счетчиков импульсов образован первый вход регистратора, входами сброса первого, третьего и четвертого счетчиков импульсов и входом суммирования второго счетчика импульсов образован второй вход регистратора, входами предварительной установки второго счетчика импульсов образованы третьи входы регистратора, входом записи второго счетчика импульсов и одним входом элемента фиксации признака подвижной единицы образован четвертый вход регистратора, другим входом элемента фикскации признака подвижной единицы образован пятый вход регистратора, вторым входом элемента И и входом задания режима счета третьего счетчика образован шестой вход регистратора.
При таком построении устройства после захода поезда на участок контроля измеряется время прохождения каждой оси между двумя датчиками, расположенными на известном расстоянии друг от друга, и время прохождения двух соседдних осей над одним из датчиков, по которым вычисляется каждое межосное расстояние. Значения этих расстояний записываются в регистры памяти, а затем сравниваются с табличными значениями (одного и суммы трех и четырех межосных расстояний), записанными в памяти. При однозначном опознании типа вагона по одному из признаков просчитывается соответствующее количество осей, после чего формируется импульс конца вагона. При отсутствии в памяти табличных значений, соответствующих измеренным межосным расстояниям, формируется признак неопознанного вагона. При остановке поезда на участке контроля и движения его в обратном направлении просчитывается количество пройденных над датчиком осей, а при изменении направления движения на прежнее (прямое) опознание и счет вагонов производятся только после проследования того же количества осей, что и в обратном направлении, что исключает сбои при остановке поезда на участке контроля. Импульсы конца вагона и признаки неопознанного вагона суммируются, и их количество выдается на выход устройства как количество вагонов (подвижных единиц) в поезде. Это позволяет распознать тип каждой известной подвижной единицы (локомотива, вагона, дрезины), подсчитапть их количество и исключить сбои в счете подвижных единиц даже при наличии в поезде неизвестных вагонов.
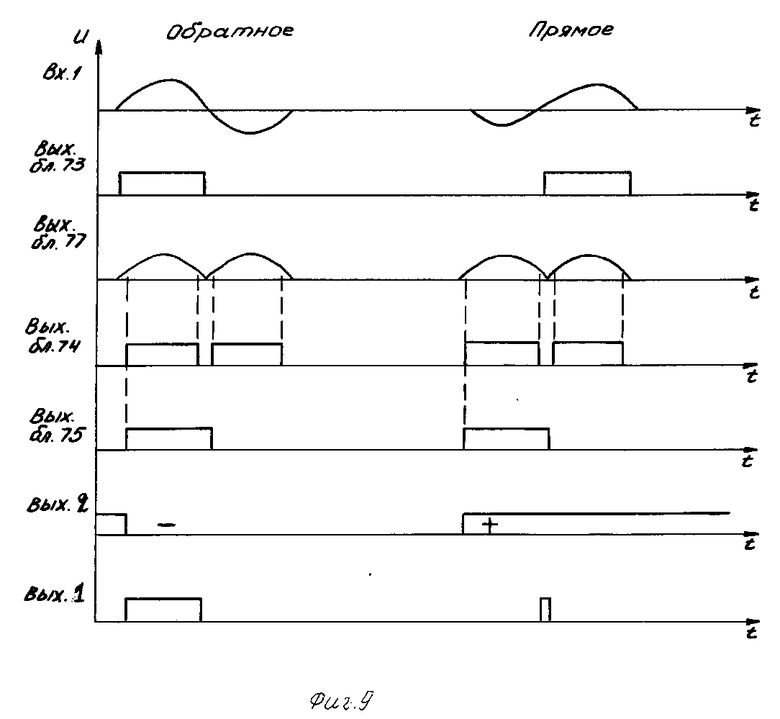
На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 - структурная схема блока определения межосных расстояний; на фиг. 3 - структурная схема блока определения осности; на фиг. 4 - структурная схема регистратора проследования подвижных единиц; на фиг. 5 - диаграммы, поясняющие работу блока определения межосных расстояний; на фиг. 6 - структурная схема формирователя кода межосного расстояния; на фиг. 7 - структурная схема блока фиксации направления движения; на фиг. 8 - диаграммы, поясняющие работу блока фиксации направления движения.
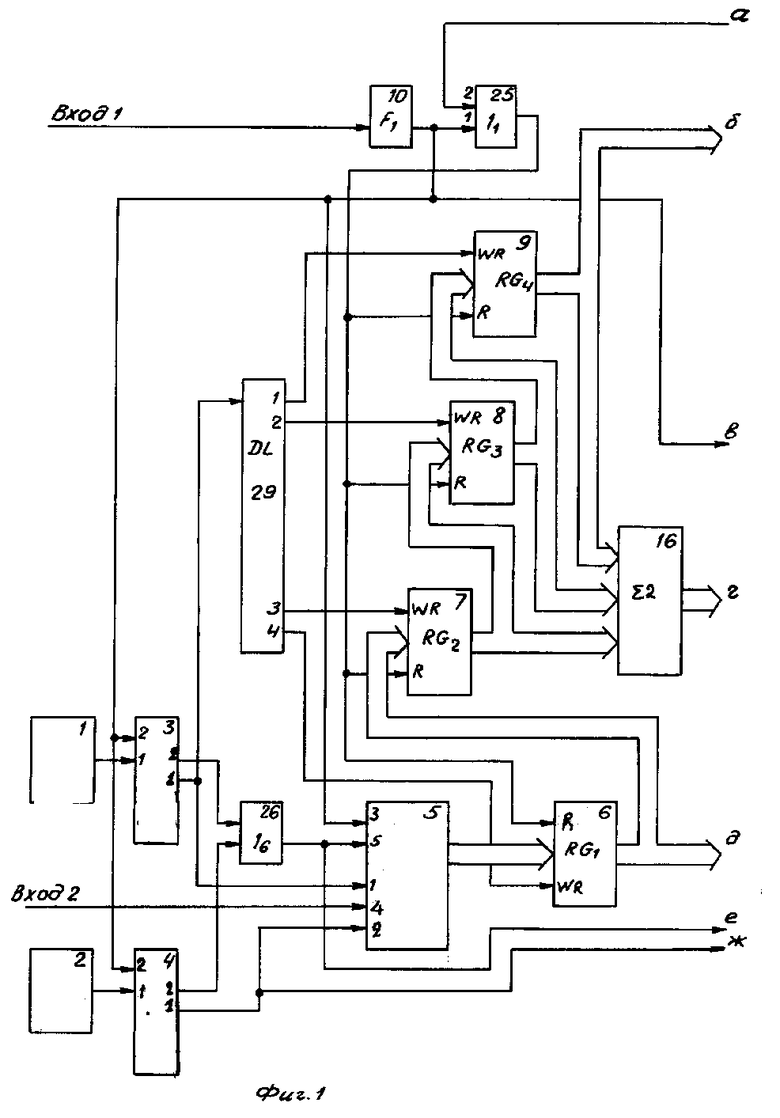
Устройство счета подвижных единиц (фиг. 1) содержит путевые датчики 1 и 2, блоки 3 и 4 фиксации направления движения, блок 5 измерения межосных расстояний, регистры 6 - 9 хранения вычисленных межосных расстояний, формирователи 10 - 13 импульса, элемент И 14, сумматоры 15 и 16, блоки 17 - 19 определения осности, регистратор 20 проследования подвижных единиц, элементы ИЛИ 21 - 26, коммутаторы 27 и 28, линию 29 задержки, блок 30 развязки. Путевые датчики размещены на путях (с внутренней стороны рельсы в зоне прохода возможного расстояния между колесами (например 1 м). В качестве датчиков использованы включенные по мостовой схеме катушки индуктивности, реагирующие на проход колеса.
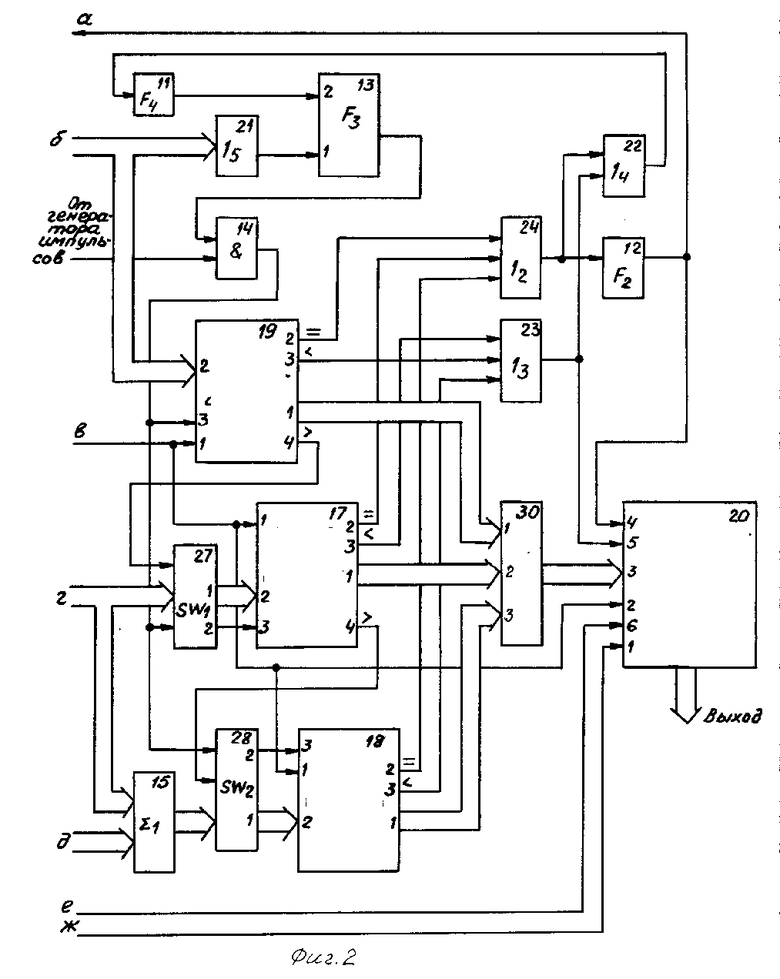
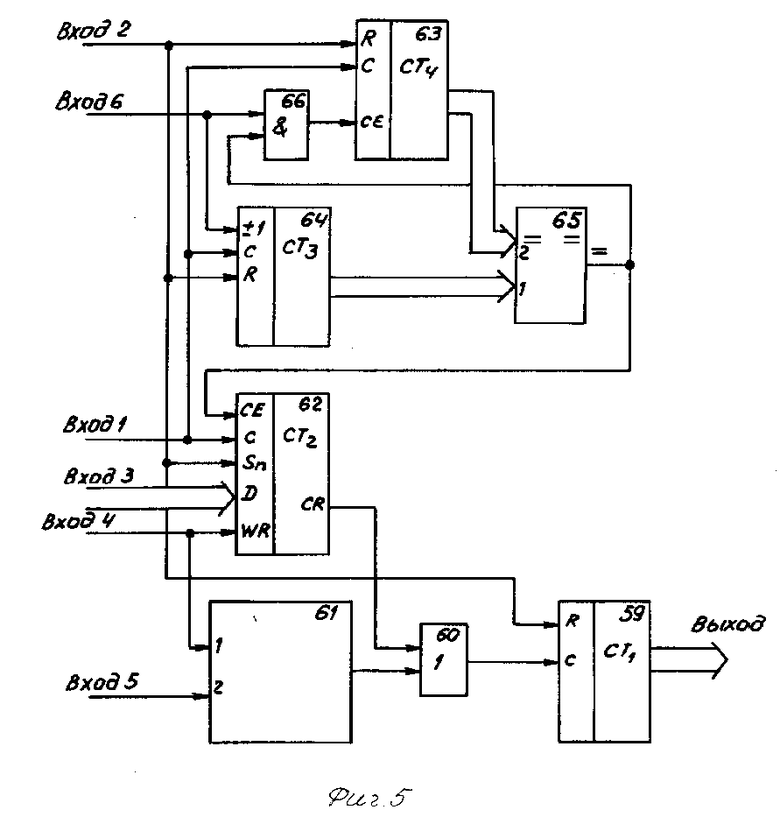
Блок измерения межосных расстояний (фиг. 2) содержит регистр 31, элемет И 32, формирователь 33 межосевого расстояния, счетчики 34 и 35, триггер 36, элементы 37 и 38 задержки, ключевые элементы 39 и 40, коммутатор 41, элементы ИЛИ 42 и 43.
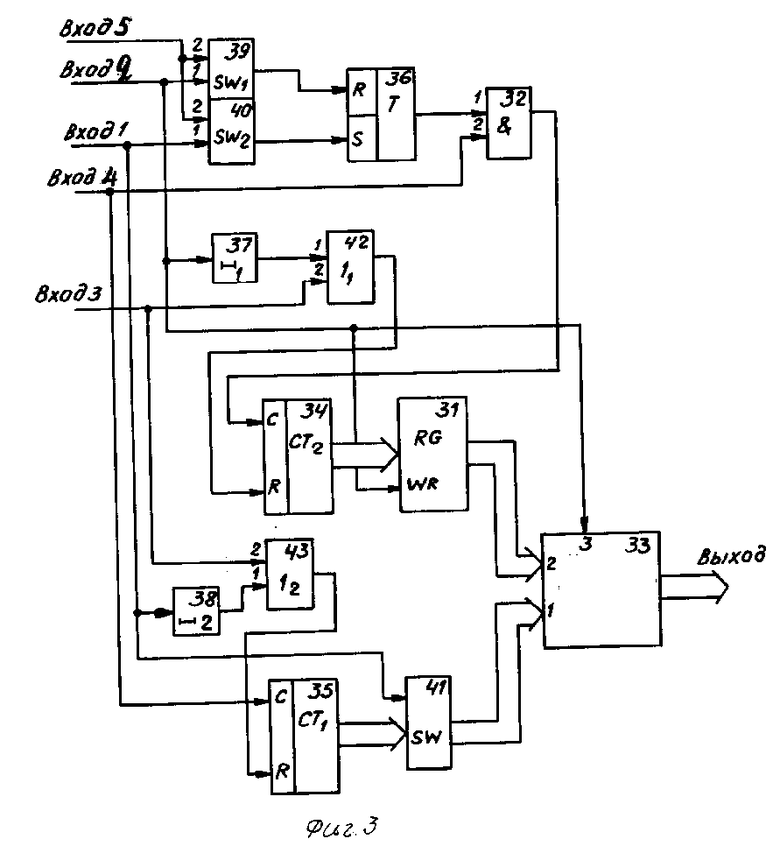
Блок определения осности (фиг. 3) содержит счетчик 44 импульсов, формирователь 45 импульсов, коммутатор 46, ключ 47, элемент 48 задержки, элементы 49 и 50 памяти, регистры 51 и 52, элементы 53 и 54 сравнения, формирователь 55 импульсов, элементы ИЛИ 56 и 57 вычитатель 58.
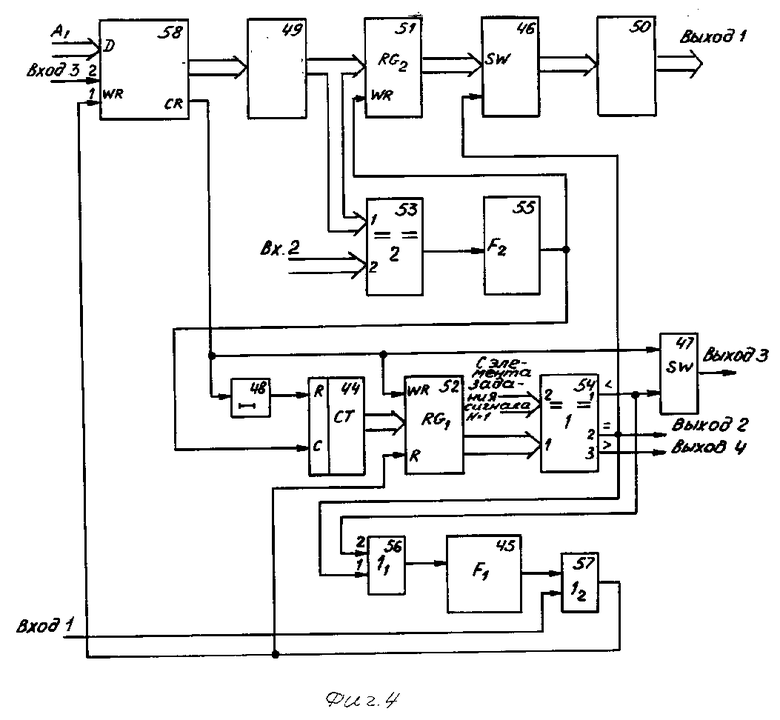
Регистратор проследования подвижных единиц (фиг. 4) содержит счетчик 59 импульсов, элемент ИЛИ 60, элемент 61 фиксации признака подвижной единицы, счетчики 62, 63 и 64, элемент 65 сравнения, элемент И 66.
Формирователь межосного расстояния (фиг. 6) содержит элемент ИЛИ 67, делитель 68 тактовых импульсов, RS-триггер 69, вычитающие счетчики 70 и 71, счетчик 72 частного.
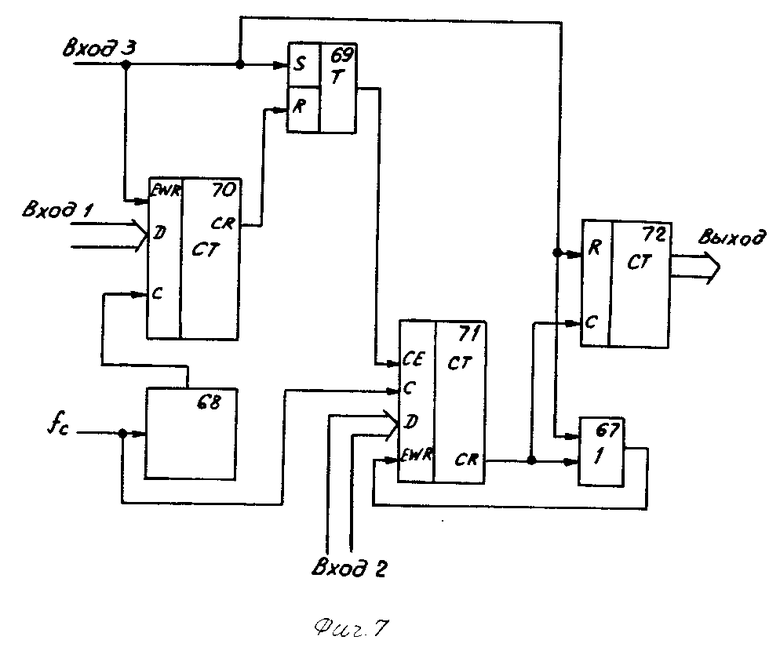
Блок фиксации направления движения подвижной единицы (фиг. 7) содержит элементы 73 и 74 сравнения, триггеры 75 и 76, детектор 77, элемет И 78.
Блок развязки представляет собой набор трехвходовых элементов ИЛИ по числу разрядов входного кода (входы одного элемента подключены к равноценным разрядам каждого входного кода).
Коммутаторы представляют собой ряд ключей (по числу коммутируемых сигналов (разрядов кода)) с объединенными входами управления. Элемент 61 признака подвижной единицы представляет собой RS-триггер.
В качестве формирователей импульсов могут быть использованы одновибраторы на логических элементах, в качестве элементов задержки - последовательно соединенных инверторы.
Такие известные устройства, как источники напряжения порога, источники опорного кода (элементы задания сигнала), генераторы тактовых импульсов, цепи управления элементами памяти, на схемах не показаны.
Частоты fт, fc и fa определяются соотношением скоростей поезда, погрешностью ее измерения, разносом датчиков, величинами и количеством номиналов межосных расстояний.
Устройство счета подвижных единиц (фиг. 1) работает следующим образом. При заходе поезда на участок контроля на формирователь 10 импульса (вход 1) приходит сигнал, который преобразуется формирователем 10 в импульс сброса, который устанавливает устройство счета подвижных единиц в исходное состояние.
При проходе над датчиком 1 оси на выходе 1 блока 3 фиксации направления движения поясляется импульс, который поступает на блок 5 измерения межосных расстояний и через линию 29 задержки - на регистры 6 - 9. При проходе оси над датчиком 2 на выходе 1 блока 4 появляется импульс, который поступает на блок 5 измерения межосных расстояний и на регистратор 20 проследования подвижной единицы. Кроме того, с выходов 2 блоков 3 и 4 через элемет ИЛИ 26 на блок 5 измерения межосевых расстояний и регистратор 20 поступает сигнал направления движения (сигнал высокого уровня на выходе элемента ИЛИ 26 - поезд движется в прямом направлении, низкого уровня - в обратном направлении).
Импульс с датчика 1 приходит на регистры 6 - 9 как сигнал записи. Отводы линии 29 задержки выбраны так, чтобы сигнал записи (импульс датчика 1) приходил сначала на регистр 9, затем на регистр 8, затем на регистр 7, затем на регистр 6, при этом время задержки на первом отводе больше времени вычисления межосного расстояния блоком 5.
При проходе над датчиком 1 первой оси первого вагона в регистр 6 записывается нуль, т. к. межосевое расстояние еще не вычислено. После прохода над датчиком 1 второй оси в регистр 6 записывается вычисленное межосное расстояние NL. Когда над датчиком 1 пройдет третья ось, то сначала из регистра 6 в регистр 7 запишется NL1, а затем из блока 5 в регистр 6 запишется новое межосевое расстояние NL2. После прохода над датчиком 1 пятой оси в регистры 6. . 9 будут записаны следующие межосевые расстояния: в регистр 9 - NL1, в регистр 8 - NL2, в регистр 7 - NL3, в регистр 6 - NL4.
После записи в регистр 9 межосного расстояния NL1 устройство счета подвижных единиц полностью заработает. Код NL1 поступает в первый блок 19 определения осности и на элемент ИЛИ 21.
С элемента ИЛИ 21 на формирователь 13 импульсов приходит сигнал (появляется только при NL0), который устанавливает на выходе формирователя 13 высокий уровень (1), и через элемент И 14 начинают проходить импульсы с частотой fа, которые поступают на блок 19 определения осности и на коммутаторы 27, 28. Блок 19 начинает определять количество осей в вагоне по типу вагона.
Если блок 19 однозначно определил по NL1 количество осей в вагоне (подвижной единице), то этот код количества осей в вагоне по сигналу "= " высокого уровня из блока 19 записывается в регистратор 20 проследования подвижной единицы.
Если блок 19 определил количество осей в вагоне неоднозначно, т. е. данное межосевое значение NL1 встречается в нескольких типах вагонов с разным количеством осей, то на выходе блока 19 появляется сигнал ">" высокого уровня. Этот сигнал поступает на коммутатор 27 и разрешает проход в блок 17 определения осности импульсов fа и кода суммы КЗ трех межосевых расстояний (КЗ = NL1 + NL2 + NL3) из сумматора 16. Начинает работать второй блок 17 определения осности.
Если блок 17 определения осности однозначно определил по КЗ количество осей в вагоне, то определенный код количества осей записывается в регистратор 20 по сигналу "= " высокого уровня из блока 17.
Если блок 17 определил осность неоднозначно, то на выходе блока 17 появляется сигнал ">" высокого уровня, который открывает коммутатор 28 и разрешает проход в третий блок 18 определения осности импульсов fa и кода суммы К4 четырех межосных расстояний (К4 = КЗ + NL4) из сумматора 15.
Когда в блок 18 запишется код К4, блок 18 начинает работать. Если блок 18 определил по К4 количество осей в вагоне, то определенный код количества осей записывается в регистратор 20 по сигналу "= " высокого уровня из блока 18.
После записи в регистратор 20 кода количества осей в вагоне, в нем отсчитывается это количество осей, формируется сигнал "конец вагона" и увеличивается на 1 значение кода счетчика вагонов. Одновременно на выходе элемента ИЛИ 24 устанавливается сигнал высокого уровня, который проходит через элемент ИЛИ 22 и поступает на формирователь 11, импульс с выхода которого устанавливают на выходе формирователя 13 низкий уровень, прекращая этим работу блоков определения осности. Регистратор 20 отсчитывает количество осей в вагоне только при наличии на входе 6 сигнала высокого уровня (поезд движется в прямом направлении).
На выходе формирователя 12 появляется импульс, который проходит через элемент ИЛИ 25 и сбрасывает регистры 6 - 9 устанавливает в исходное состояние блоки 17 - 19 определения осности. Устройство счета подвижных единиц готово к определению новой подвижной единицы. Код на выходе регистратора 20 проследования подвижных единиц определяет количество просчитанных вагонов.
Если один из блоков определения осности не определит количество осей в вагоне, то на выходе этого блока появится сигнал "<" высокого уровня, который поступает на элемент ИЛИ 23. С выхода этой схемы сигнал "<" поступает в регистратор 20 и на элемент ИЛИ 22. В регистраторе 20 сигнал "<" высокого уровня увеличивает код счетчика 59 (фиг. 4) вагонов на 1.
В блоке определения осности есть три выхода сигналов: сигнал u"<", сигнал "= " и сигнал ">", и если на одном из выходов установлен высокий уровень, то на двух других - низкий.
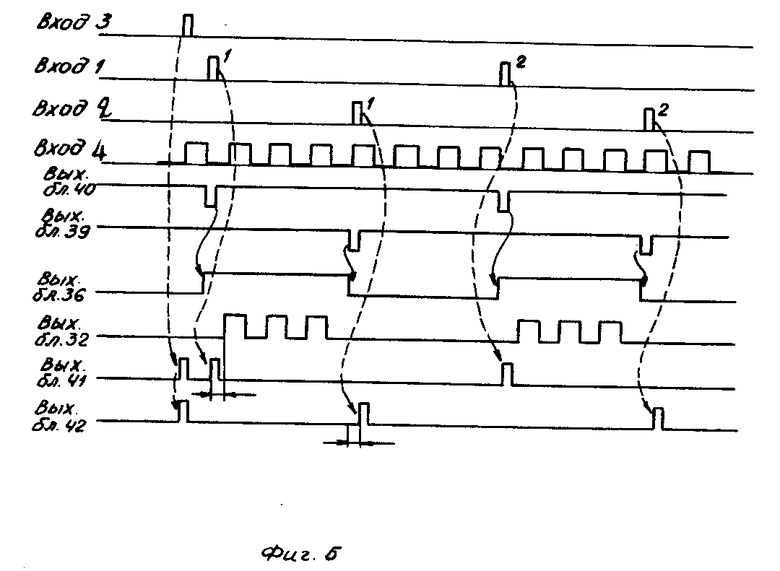
Блок 5 измерения межосных расстояний (фиг. 2) работает следующим образом (работу поясняет диаграммы фиг. 5).
С формирователя 10 импульса (фиг. 1) сигнал поступает на вход 3 блока 5 (фиг. 2) и сбрасывает счетчик 34 (через элемент ИЛИ 42) и счетчик 35 (через элемент ИЛИ 43). Блок 5 работает только при движении поезда в прямом направлении, в этом случае на входе 5 установлен сигнал высокого уровня и через ключи 39 и 40 могут проходить сигналы с датчиков 2 и 1 соответственно.
При проходе оси над датчиком 1 на входе 1 блока появляется импульс, который выполняет следующие функции: через ключ 40 устанавливает RS-триггер 36 в состояние 1. При этом через элемент 32 И на счетчик 34 начинают поступать со входа 2 импульсы частотой fт, разрешает проход кода tк черзе коммутатор 41 из счетчика 35 в формирователь 38 межосного расстояния; через элемент 38 задержки и элемент ИЛИ 43 сбрасывает счетчик 35.
При проходе над датчиком 1 первой оси на втором входе формирователя 33 межосного расстояния код также нулевой, в итоге на выходе блока измерения межосных расстояний код соответствует нулю.
При проходе оси над датчиком 2 на входе 2 блока появляется импульс, который выполняет следующее: через ключ 39 устанавливает RS-триггер 36 в состояние 0, запрещая прохождение импульсов fт через элемет И 32 на счетчик 34; записывает из счетчика 34 в регистр 31 код tg, который подается на вход формирователя 33 межосного расстояния; поступает на вход 3 формирователя 33; через элемент 37 задержки и элемент ИЛИ 42 сбрасывает счетчик 34, подготовив его таким образом к работе.
Из формирователя 33 код проходит на выход блока 5 измерения межосных расстояний.
Формирователь 33 межосного расстояния (фиг. 6) работает следующим образом. Импульсом с входа 3 в счетчик 70 записывается код tki счетчика 35 (вход 1), в счетчик 71 - код tgi регистра 31 (вход 2), счетчик 72 обнуляется, а триггер 69 устанавливается в единичное состояние, разрешая счет счетчика 70 и 71. Делитель 68 частоты fc имеет коэффициент деления, пропорциональный расстоянию между датчиками, поэтому частота на счетном входе счетчика 70 меньше частоты на счетном входе счетчика 71. При каждом переполнении счетчика 71 импульс переноса увеличивает код счетчика 72 на единицу и, проходя через элемент ИЛИ 67, осуществляет повторную запись кода tgi в счетчик 71. После переполнения счетчика 70 импульс переноса с его выхода опрокидывает триггер 69, запрещая счет счетчиков 70 и 71. Выходной код счетчика 72, определяемый числом переполнений счетчика 71 за время одного переполнения счетчика 70, соответствует вычисленному межосному расстоянию.
Блок 19 (17, 18) определения осности (фиг. 3) работает следующим образом.
Со входа 1 через элемент ИЛИ 57 на вход записи счетчика 58 приходит импульс захода поезда и записывает в вычитатель 58 код Na количества адресов, по которым записаны табличные межосные расстояния, а также сбрасывает регистр 52. Одновременно на счетный вход вычитателя 58 начинают поступать импульсы частотой fa.
С приходом каждого импульса fa на выходе вычитателя 58 появляется новый адрес, который поступает на элемент 49 памяти, в котором записаны табличные межосные расстояния.
В блоке 19 определения осности в элемент 49 памяти записаны табличные межосные расстояния NL1 для всех типов вагонов. В блоке 17 определения осности в элемент 49 памяти записаны табличные значения суммы трех последовательных межосных расстояний КЗ = NL1 + NL2 + NL3 (для всех типов вагонов). В блоке 18 определения осности в элемент 49 памяти записаны табличные значения суммы четырех последовательных расстояний К4 = КЗ + NL4 (для всех типов вагонов).
Анализ межосных расстояний показал, что для определения осности подвижной единицы необходимо и достаточно знать три величины: NL1, КЗ, К4.
Одно и то же табличное расстояние может быть у разных типов вагонов с разным количеством осей (несколько вариантов), поэтому это табличное расстояние может быть записано в элемент 49 памяти по разным адресам. Каждое табличное межосевое расстояние поступает на регистр 51 хранения табличного межосевого расстояния и на элемент 53 сравнения. На второй вход элемента 53 сравнения подается вычисленное межосное расстояние NL. Если табличное и вычисленное межосные расстояния равны между собой, то на выходе элемента 53 сравнения устанавливается высокий уровень 1, который подается на формирователь 55 импульса. С фрмирователя 55 импульс поступает на регистр 51 и на счетчик 44. Этим импульсом в регистр 51 записывается табличное расстояние.
Когда все адреса будут просмотрены, на выходе вычитателя 58 появится сигнал переноса, который сначала записывает в регистр 52 код счетчика 44 и разрешает прохождение через ключ 47 импульса "<" с элемента 54 сравнения, затем через элемент 48 задержки сбрасывает счетчик 44. В элементе 54 сравнения сравнивается код вариантов (количество типов вагонов, в которых встречается данное вычисленное расстояние) с единицей.
До прихода сигнала переноса из вычитателя 58 на выходе "<" элемента 54 сравнения установлен высокий уровень 1, т. к. на элемент 54 сравнения с регистра 52 приходит низкий уровень 0 (на выходах ">" и "= " установлен низкий уровень), но т. к. ключ 47 закрыт, то и на выходе "<" блока определения осности установлен низкий уровень.
Если вычисленное расстояние встречается только в одном типе вагона, то на выходе "= " элемента 54 сравнения устанавливается высокий уровень. Этот сигнал выполняет следующие функции: разрешает проход через коммутатор 46 кода табличного расстояния из регистра 51 в элемент 50 памяти; через элемент ИЛИ 56 поступает на формирователь 45 импульса, преобразуется в импульс и через элемент ИЛИ 57 записывает в вычитатель 58 количество адресов, по которым записаны табличные межосные расстояния, подготовив блок определения осности к новой работе.
Код табличного расстояния, записанный в регистре 51, для элемента 50 памяти является адресом, по которому в него записано количество осей в определенном типе вагона (при прохождении осей в каждом вагоне на момент определения осности).
Если вычисленное расстояние не встречается ни в одном типе вагонов, то на выходе "<" элемента 54 сравнения устанавливается высокий уровень, одновременно с этим открывается ключ 47, и на выходе ключа 47 появляется импульс "<" длительностью, равной длительности сигнала переноса из вычитателя 58 (на это время открывается ключ 47). Одновременно импульс "<" с выхода элемента 54 сравнения приходит через элемент ИЛИ 56 на формирователь 45 импульсов, где преобразуется в импульс и через элемент 57 ИЛИ записывает в вычитатель 58 количество адресов, подготовив таким образом блок определения осности к новой работе.
Если вычисленные расстояния встречаются в нескольких типах вагонов, то высокий уровень устанавливается на выходе ">" элемента 54 сравнения.
В блоке 18 определения осности в элементе 54 сравнения выход " > " не используется.
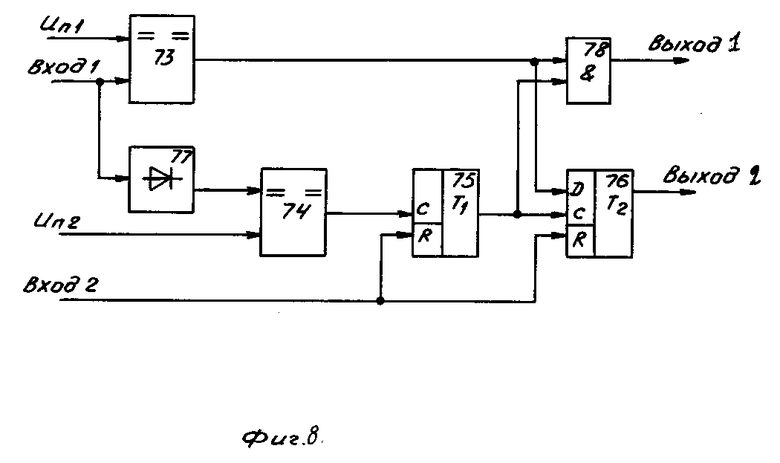
Работу блоков 3 и 4 фиксации направления движения подвижной единицы (фиг. 7) поясняют диаграммы фиг. 8. При заходе поезда на участок контроля на вход 2 приходит импульс, который устанавливает блоки в исходное состояние.
Во время прохода колеса над датчиком на вход 1 блока фиксации приходит сигнал (фиг. 8). По этому сигналу блок определяет направление движения и момент нахождения колеса над датчиком (устанавливает на выходе 2 сигнал высокого или низкого у ровня в зависимости от движения поезда в прямом или обратном направлении соответственно и формирует сигнал прохода оси на выходе 1). Диаграммы фиг. 8 соответствуют справа движению поезда в прямом направлении, слева - в обратном. Детектор 77 преобразует входной двухполярный сигнал индуктивного датчика в однополярный, элементы 73 и 74 сравнения формируют прямоугольные импульсы при превышении входным напряжением заданного порога (напряжение порога элемента 74 выше напряжения порога элемента 73). Счетный триггер 75 формирует импульс между фронтами импульсов элемента 74 сравнения, а D-триггер 76, тактируемый выходным импульсом триггера 75, устанавливает по фронту выхода триггера 75 на выходе 2 и хранит состояние выхода элемента 73 сравнения, определяющее знак направления движения оси (поезда). Элемент И 78 формирует на выходе 1 импульс прохода оси.
Регистратор 20 проследования подвижных единиц (фиг. 4) работает следующим образом.
При заходе поезда на контрольный участок на входе 2 блока появляется импульс начальной установки, который сбрасывает счетчики 59, 63, 64 и записывает в счетчик 62 число > 5, подготовив таким образом регистратор 20 к работе. При прохождении первой оси первого вагона над датчиком 1 (поезд движется в прямом направлении) на входе 6 устанавливается сигнал высокого уровня, который, проходя через элемент И 66, разрешает работу счетчику 63. Этот же сигнал разрешает работу счетчику 64 на сложение. Коды с выходов этих счетчиков поступают на элемент 65 сравнения. При движении поезда в прямом направлении и при остановке коды равны между собой, и на выходе "= " элемента 65 будет сигнал высокого уровня, который разрешает работу счетчику 62 (на втором входе элемента 66 И сигнал высокого уровня). На вход 4 с формирователя 12 импульсов (фиг. 1) приходит импульс, который записывает в счетчик 62 количество осей в вагоне, которое через блок 30 развязки приходит с одного из блоков определения осности (блоки 19, 17 и 18), и устанавливает на выходе элемента 61 фиксации признака подвижной единицы сигнал низкого уровня. Со входа 1 на счетчик 62 приходят импульсы с блока 4 (фиг. 1). Счетчик 62, работающий на вычитание, отсчитывает записанное в него количество осей в вагоне, и, когда будет отсчитана последняя ось в определенном вагоне, на выходе переноса счетчика 62 осей появляется импульс, который через элемент ИЛИ 60 приходит на счетный вход счетчика 59. Счетчик 59 считает импульсы, отмечающие конец вагона.
Если поезд остановился и пошел в обратном направлении, то на входе 6 устанавливается сигнал низкого уровня, который запрещает работу счетчику 63 и переключает счетчик 64 для работы на вычитание. С приходом на вход 1 первого после смены направления движения импульса с датчика 2 на выходе элемента 65 установится сигнал низкого уровня, который запретит работу счетчику 62. Если поезд снова пошел в прямом направлении (на входе 6 установился высокий уровень) счетчик 64 возобновит счет на увеличение. Когда код на выходе этого счетчика станет равным коду на выходе счетчика 63 (восстановится место положения поезда до остановки и смены направления движения) на выходе элемента 65 установится сигнал высокого уровня, который приходит на счетчики 62 и 63 (на счетчик 63 через элемент И 66) и разрешает им работу.
Если количество осей в вагоне не определено, то с блока определения осности через элемент ИЛИ 23 (фиг. 1) на входе 5 регистратора 20 проследования подвижных единиц появляется импульс "<", который приходит на элементе 61 фиксации признака подвижной единицы и устанавливает на выходе его сигнал высокого уровня (начинается формирование импульса неопознанного вагона). Этот сигнал походит через элемент ИЛИ 60 на счетчик 59 и увеличивает код вагонов на единицу. Когда количество осей в вагоне вновь определено, на вход 4 приходит импульс и устанавливает на выходе элемента 61 низкий уровень (формирование импульса неопознанного вагона закончено).
Код на выходе счетчика 59 (и на выходе регистратора 20), суммирующего импульсы конца вагона и импульсы неопознанного вагона, соответствует количеству подвижных единиц в поезде.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
| ТОЧЕЧНЫЙ ПУТЕВОЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1993 |
|
RU2086932C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2154285C1 |
| Устройство для счета подвижных единиц | 1986 |
|
SU1512844A1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1992 |
|
RU2037846C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1996 |
|
RU2106655C1 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ УРОВНЕМЕР | 2000 |
|
RU2176382C1 |
| Устройство для контроля проследования и счета физических единиц железнодорожного подвижного состава | 1984 |
|
SU1230898A1 |
| Устройство для счета подвижных единиц железнодорожного транспорта | 1984 |
|
SU1284870A1 |
| ИМПУЛЬСНО-ФАЗОВЫЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ СЛОЕВ РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ИХ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1999 |
|
RU2188399C2 |
Использование: для счета подвижных единиц. Сущность изобретения: устройство содержит два путевых датчика, два блока фиксации направления движения, блок измерения межосных расстояний, четыре регистра, четыре формирователя импульсов, элемент И, два сумматора, три блока определения осности, регистратор проследования подвижных единиц, шесть элементов ИЛИ, два коммутатора, элемент задержки и блок развязки. 4 з. п. ф-лы, 9 ил.
