1©
(Л
ел 1C
00
{
4
3151
датчика, элементы ИЛИ-НЕ 13 и 14, блок 16 реверсивного контроля проследования подвижной единицы, элемент И 19,элементы ИЛИ 24 и 25, блок 21 определения типа тележки ломокотива.Вход блока 12 соединен с датчиком 3, выход - с одним входом элемента 14, другой вход которого соединен с выходом элемента 13, выход подключен к одному входу элемента ИЛИ 25, дру2844
той вход которого соединен с третьим выходом блока 10, выход подключен к первому входу блока 21, второй вход
которого соединен с выходом элемента И 1 9 , третий вход соединен с чет- вертьм выходом блока 10, а выход подключен к другому входу элемента ИЛИ 24. .Входы блока 16, имеющего счет 0 ный триггер, связаны с последним через элементы ИЛИ 32. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для счета подвижных единиц железнодорожного транспорта | 1984 |
|
SU1284870A1 |
| Устройство для контроля проследования и счета физических единиц железнодорожного подвижного состава | 1984 |
|
SU1230898A1 |
| УСТРОЙСТВО ДЛЯ СЧЕТА ПОДВИЖНЫХ ЕДИНИЦ | 1991 |
|
RU2013263C1 |
| Способ формирования информационной модели поезда | 2019 |
|
RU2718750C1 |
| Устройство для счета единиц подвижного состава | 1988 |
|
SU1623903A1 |
| Устройство для контроля занятости участка пути на сортировочной горке | 1981 |
|
SU1002176A1 |
| Устройство для определения статических параметров отцепов на сортировочной горке | 1985 |
|
SU1320107A1 |
| БИБЛИОТЕКА J | 1970 |
|
SU277010A1 |
| Устройство для автоматической маркировки железнодорожных единиц подвижного состава | 1987 |
|
SU1507633A1 |
| Устройство автоматического контроля расформирования составов на сортировочной горке | 1979 |
|
SU787232A1 |
Изобретение относится к железнодорожной автоматике и предназначено для автоматического раздельного контроля проследования и счета вагонов и локомотивов различных типов. Цель изобретения - повышение надежности. Устройство содержит блок 10 определения осности подвижной единицы, блок 12 контроля свободности путевого участка в зоне действия одного датчика, элементы ИЛИ-НЕ 13 и 14, блок 16 реверсивного контроля проследования подвижной единицы, элемент И 19, элементы ИЛИ 24 и 25, блок 21 определения типа тележки локомотива. Вход блока 12 соединен с датчиком 3, выход - с одним входом элемента 14, другой вход которого соединен с выходом элемента 13, выход подключен к одному входу элемента ИЛИ 25, другой вход которого соединен с третьим выходом блока 10, выход подключен к первому входу блока 21, второй вход которого соединен с выходом элемента И 19, третий вход соединен с четвертым выходом блока 10, а выход подключен к другому входу элемента ИЛИ 24. Входы блока 16, имеющего счетный триггер, связаны с последним через элементы ИЛИ 32. 2 ил.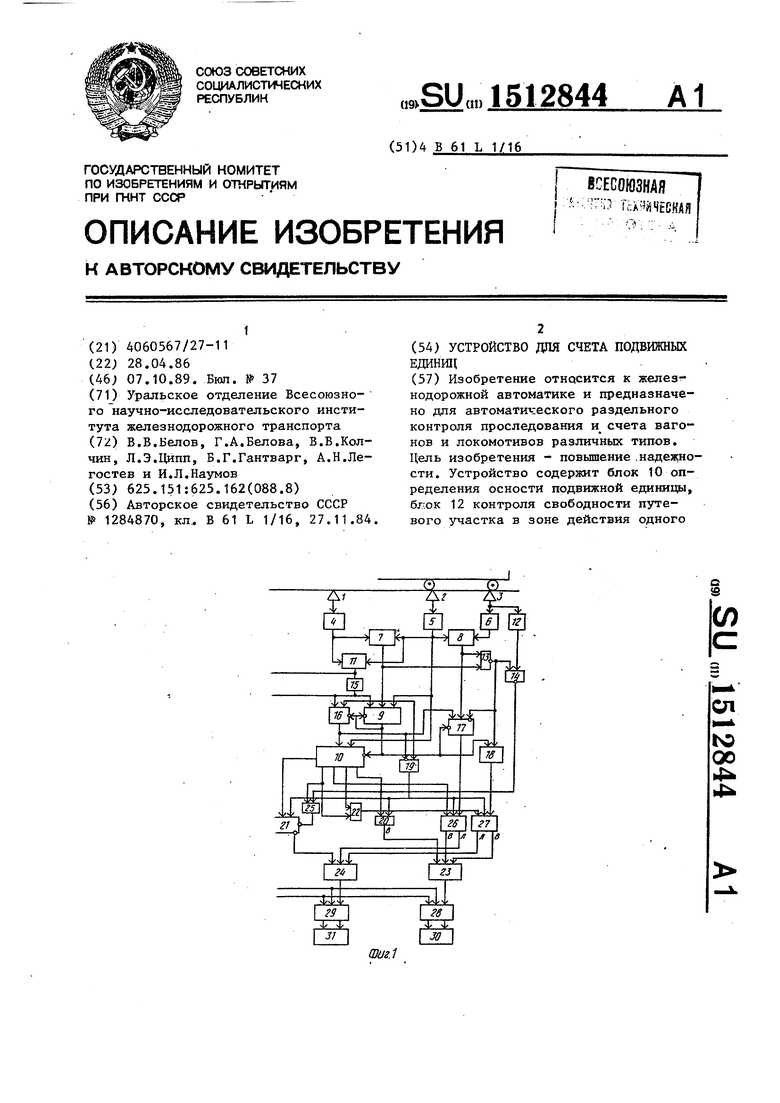
Изобретение относится к железнодорожной автоматике и может быть использовано дня автоматического раздельного контроля проследования и счета вагЪнов и локомотивов различных типов.
Целью изобретения является повышение надежности.
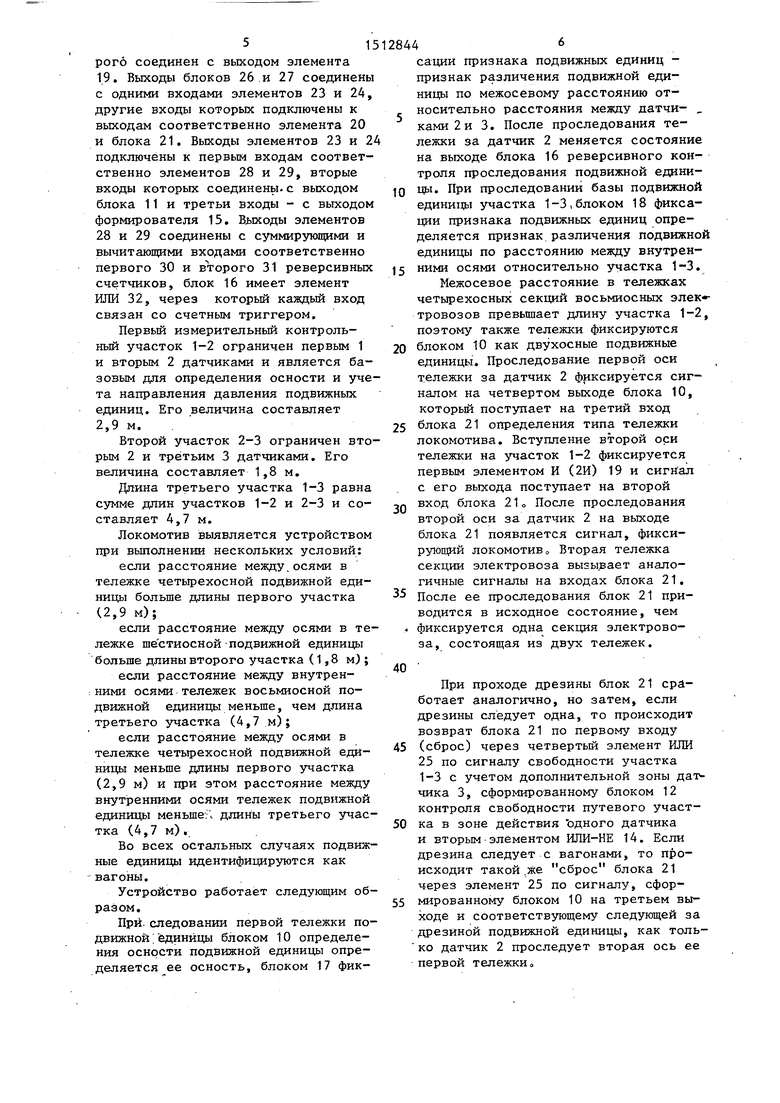
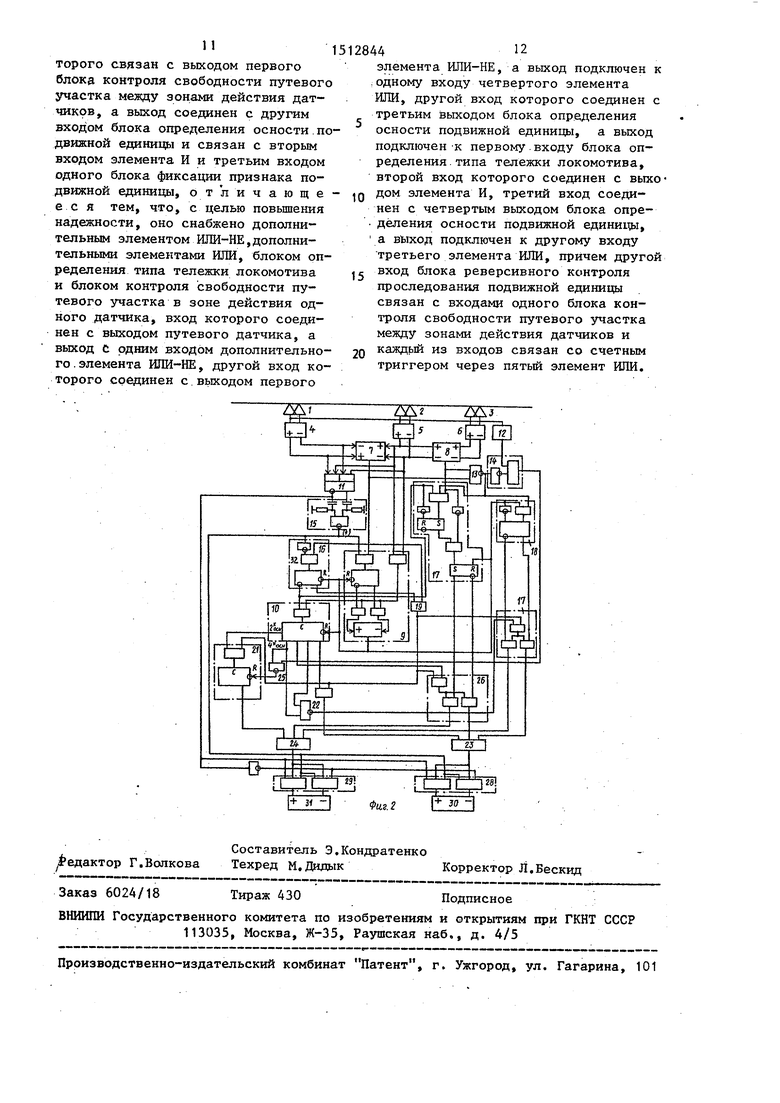
На фиг.1 представлена схема устройства; на фиг.2 - вариант вьшолне- ния узлов устройства на логических элементах.
Устройство содержит установленные на рельсовом пути первый 1, второй 2.и третий 3 реверсивные путевые ; датчики, выходы первого 1 и второго 2, второго 2 и третьего 3 которых через формирователи 4-6 импульсов связаны со входами блоков 7 и 8 контроля свободности путевого участка между зонами действия датчиков,блок 9 фиксации проследования подвижной единицы и блок 10 определения оснос- ти подвижной единицы, первые входы которьк связаны с выходом датчика 2, блок 11 фиксации направления движения (RS-триггер), входы которо- го соединены с входами блока 7,выход которого подключен к второму входу блока 9, блок 12 контроля свободно- сти путевого участка в зоне действия одного датчика, вход которого соединен с выходом датчика 3, первый и второй элементы ИЛИ-НЕ 13 и 14, входы элемента 13 из которых подключены к выходам блоков 7 и 8 и выход подключен к первому входу элемента 14,. второй вход которого подключен к выходу блока 12, формирователь 15 импульса смены направления движения, вход которого подключен к выходу блока 11 и выход соединен с третьим входом блока 9, имеющий счетный триг гер блок 16 реверсивного контроля
и
5 0 5 г
проследования подвижной единицы первьй вход которого соединен с выходом блока 7, второй вход соединен с выходом формирователя 15 и выход подключен к второму входу блока 10, блоки 17 и 18 фиксации признака подвижных единиц, первые входы которых соединены с выходом элемента 13 и вторые входы соединены с выхо.-.- дом блока 9, с которым соединены его собственный четвертый вход и третКи входы блоков 10 и 16, первый и второй элементы И (2И) 19, 20, блок- 1 определения типа тележки локомотива, первый 22, второй 23, третий 24 и четвертый 25 элементы ИЛИ, первый 26 и второй 27 блоки определения типа подвижной единицы, из которьк первьм вход блока -26 подключен к первому выходу блока 10, первый вход блока 27 подключен к выходу элемента 22, входы которого соединены со вторым и третьим выходами 1 блойа 10, вторые вх оды блоков 26 и 27 подключены к выходам соответственно блоков 17 и 18, третьи входы блоков 26 и 27..подключены к выходу элемента 19, один вход которого соединен с выходом блока 7 и другой - с выходом блока 16, первый 28 и второй
29элементы коммутации., первый
30и второй 31 реверсивные счетчики. Третий вход блока 17 соединен с выходом блока 16. и четвертый вход - с выходом .блока 8. Выход элемента 14 подключен к одному входу элемента 25, другой вход которого соединен с третьим выходом блока 10 и выход подключен к первому входу блока 21, второй вход которого соединен с выходом элемента 19 и третий вход - с четвертым выходом блока 10. Пятьй выход блока 10 подключен к одному входу элемента 20, другой вход которогб соединен с вькодом элемента 19. Выходы блоков 26 и 27 соединены с одними входами элементов 23 и 24, другие входы которых подключены к выходам соответственно элемента 20 и блока 21. Выходы элементов 23 и 2 подключены к первым входам соответственно элементов 28 и 29, вторые входы которых соединены.с выходом блока 11 и третьи входы - с выходом формирователя 15. Выходы элементов 28 и 29 соединены с суммирз щими и вычитающими входами соответственно первого 30 и второго 31 реверсивных счетчиков, блок 16 имеет элемент ИЛИ 32, через который каждый вход связан со счетньм триггером.
Первый измерительный контрольный участок 1-2 ограничен первым 1 и вторым 2 датчиками и является базовым для определения осности и учета направления давления подвижных единиц. Его величина составляет 2,9 м.
Второй участок 2-3 ограничен вторым 2 и третьим 3 датчиками. Его величина составляет 1,8 м.
Длина третьего участка 1-3 равна сумме длин участков 1-2 и 2-3 и составляет 4,7 м.
Локомотив выявляется устройством при выполнении нескольких условий:
если расстояние между,осями в тележке четырехосной подвижной единицы больше длины первого участка (2,9 м);
если расстояние между осями в тележке шестиосной подвижной единицы больше длины второго участка (1,8 м) ;
если расстояние между внутрен- :ними осями тележек восьмиосной подвижной единицы меньше, чем длина третьего участка (4,7 м);
если расстояние между осями в тележке четырехосной подвижной единицы меньше длины первого участка (2,9 м) и при этом расстояние между внутренними осями тележек подвижной единицы меньше-/ длины третьего участка (4,7 м),
Во всех остальных случаях подвижные единицы идентифицируются как вагоны.
Устройство работает следующим образом.
При.следовании первой тележки подвижной ; единицы блоком 10 определения осности подвижной единицы определяется ее осность, блоком 17 фиксации признака подвижных единиц - признак различения подвижной единицы по межосевому расстоянию относительно расстояния между датчи- , ками2и 3. После проследования тележки за датчик 2 меняется состояние на выходе блока 16 реверсивного контроля проследования подвижной едини0 цы. При проследовании базы подвижной едини15з1 участка 1-3,блоком 18 фиксации признака подвижных единиц определяется признак.различения подвижной единицы по расстоянию между внутрен5 ними осями относительно участка 1-3.
Межосевое расстояние в тележках четырехосных секций восьмиосных тровозов превьшает длину участка 1-2, поэтому также тележки фиксируются
0 блоком 10 как двухосные подвижные единицы. Проследование первой оси тележки за датчик 2 фиксируется сигналом на четвертом выходе блока 10, который поступает на третий вход
5 блока 21 определения типа тележки локомотива. Вступление второй оси тележки на участок 1-2 фиксируется первым элементом И (2И) 19 и сигнал с его выхода поступает на второй вход блока 21 о После проследования второй оси за датчик 2 на выходе блока 21 появляется сигнал, фиксирующий локомотив Вторая тележка секции электровоза вызывает аналогичные сигналы на входах блока 21. После ее проследования блок 21 приводится в исходное состояние, чем фиксируется одна секция электровоза, состоящая из двух тележек.
При проходе дрезины блок 21 сработает аналогично, но затем, если дрезины следует одна, то происходит возврат блока 21 по первому входу
5 (сброс) через четвертый элемент ИЛИ 25 по сигналу свободности участка 1-3 с учетом дополнительной зоны датчика 3, сформированному блоком 12 контроля свободности путевого участ0 ка в зоне действия одного датчика и вторым-элементом ИЛИ-НЕ 14. Если дрезина следует с вагонами, то происходит такой .же сброс блока 21 через элемент 25 по сигналу, сфор5 мированному блоком 10 на третьем выходе и соответствующему следующей за дрезиной подвижной единицы, как толь- ко датчик 2 проследует вторая ось ее первой тележки о
0
5
0
Проследование каждой подвижной единицы (для восьмиосного электровоза - тележки) фиксируется сигналом на выходе блока 9 фиксации про- слерования подвижной единищ.1 после прохода за датчик 2 последней оси каждой второй тележки. Этот сигнал устанавливает в исходное состояние блоки 9, 10, 16, 17 и 18.
Сигналы свободности участков 1-2, 2-3 с блоков 7 -и 8 контроля свободности путевого участка между зонами действия датчиков поступают на входы блока 17,. формирующего на выходе сигнал логической единищз, если расстояние между осями в тележке больше участка 2-3 и сигнал логического нуля, если межосевое расстояние меньше участка 2-3, блок 17 и блок 10 одновременно формируют свои сигналы по проследованию первой телелски подвижной единицы по сигналу с выхода блока 16, Сформированные сигналы фиксируются этими блоками до полного проследования второй тележки за датчик 2.
По сигналу свободности участка 1-3 под базой подвижной единицы на выходе блока 18 появляется сигнал логической единицы или логического нуля, соответствующий расстоянию между внутренними осями тележек подвижной единицы больше или меньше длины участка 1-3.
Сигнал проследования четырехосной подвижной единицы (или вось- миосной) через первый элемент ИЛИ 22 формируется вторым блоком 27 определения типа подвижной единицы (второй и третий выходы блока 10) по сигналу с выхода элемента 19 в зависимости от того, больше или меньше расстояние между внутренними осями тележек подвижной единицы (определяется блоком 18). При меньшем расстоянии фиксируется локомотив, а если расстояние больше - вагон.
Сигнал проследования шестиосной подвижной единицы формируется первым блоком 26 i определения типа подвижной единицы по сигналу оснос (первый выход блока 10), сигналу элемента 19 (проследование второй тележки) и сигналу с выхода блока 17. Если расстояние больше участка 2-3, то выдается сигнал проследова . ния локомотива через третий элемент ИЛИ 24, если меньше, то через
второй элемент ИЛИ 23 с выхода блока 26 вьщается сигнал проследования вагона.
Если осей в подвижной единице больше десяти, по сигналу с пятого выхода блока 10 формируется на выходе элемента 23 .через второй элемент И (2И) 20 сигнал, определяющей по- движную единицу как вагон.
Формирование выходных сигналов устройства и реверсивный счет подвижных единиц обеспечивается блоком 1.1 фиксации направления движения,
формирователем 15 импульса смены направления движения, блоком 9, блоком 16 и переключением сигналов на первом 28 и втором 29 элементах коммутации.
Блок 11 представляет собой RS-триг- гер, переключающий по переднему фронту сигналов формирователей 4 и 5 импульсов. При прямом направлении движения на выходе блока 11 имеется
сигнал логической единицы, при обратном - логический нуль. Изменение состояния блока 11 фиксируется формирователем 15.
При любом изменении .состояния
блока 11 на выходе формирователя 15 кратковременно появляется сигнал (импульс) логического нуля, который воздействует на вход блока 16 при свободности участка 1-2. Сигнал о
состоянии этого участка поступает на первый вход блока 16 с выхода блока 7. На третьем входе (сброс) блока 16 при отсутствии подвижных единиц на участке 1-2 имеется блокирзтащий нулевой потенциал с выхода блока 9. Этот сигнал исключает сра- батьшание блока 16 при вступлении подвижной единицы на участок 1-2, если предьщущая подвижная единица
двигалась в противоположном направлении. Этим же сигналом блок 16 приводится в исходное состояние после щ.оследования каждой подвижной единицы.
Если подвижная единица при движении слева направо вступает на згчасток 1-2 и пойдет обратно, сработают блоки 7, 11 и формирователь 15о Блок 16 не изменяет своего состояния, так как он заблокирован сигналом с вькода 9 по третьему входу (сброс) и из-за наличия сигнала занятости участка 1-2 с выхода блока 7.
91
Если подвижная единица вступает за датчик 2 и пойдет.обратно (без освобождения участка 1-2), блок 16 также не сработает, так как занят участок 1-2.
Если первая тележка подвижной единицы проследует за датчик 2 и пойдет обратно, то при освобождении участка .1-2 изменяет свое состояние блок 16. При обратном движении в момент вступления на датчик 2 и вьща- чи сигнала формирователем 5 изменяется состояние блока 11, срабатывает формирователь 15 и блок 16 возвр щается в исходное состояние,а затем по заднему . входного сигнала появляется сигнал занятости из блока 7. Устройство не зафиксирует проследования подвижной единицы.
Если вторая тележка подвижной единицы вступает на участок 1-2 и пойдет обратно, то при занятии участка на выходе устройства появляется сигнал о следовании подвижной единицы в прямом направлении, так как изменяет состояние блок 16 через элемент 19, блок 21, элементы 20, 22, блоки 26, 27 и элементы 28, 29. При обратном движении изменяет состояние блок 11 и переключает через элемент 28 или 29 вьщачу сигнала с суммирующего входа счетчика 30 или 31 на вычитающий вход. Таким образом, подвижная единица фиксируется в прямом и обратном направлении, в результате счетчики 30 и 31 не изменяют своего состояния .
При вступлении второй тележки за датчик 2 без освобождения участка 1-2 и возвращении обратно устройство работает аналогично.
Прохождение второй тележки за датчик 2 является окончанием проследования подвижной единии(Ы.
При обратном движении с вступлением первой по ходу оси на участок 1-2 сигнал с выхода формирователя 15 не перебрасьшает блок 16,. так как в этот момент отсутствует сигнал занятия участка 1-2, поступающий с выхода блока 9, который появляется только по заднему фронту входного сигнала. В остальном работа устройства в этом случае аналогичная описанному вьше.
Выходные сигналы устройства, формируемые элементом 23 или 24, ком284410
мутируются элементом 28 или 29.при изменениях направления движения, которые фиксируются блоком 11.
Импульс формирователя 15 осуществляет разделение выходных сигналов сложения и вычитания во времени при изменениях направления движения.
В предлагаемом устройстве четко Q разделяются моменты переключения
блоков, обеспечивая тем самым их устойчивую работу.
15
20
25
30
35
40
45
50
55
Формула изобретения
Устройство для счета подвижных единиц, содержащее установленные на рельсовом пути реверсивные путевые датчики, выход одного из которых связан с одним из входов блока фиксации проследования подвижной единицы и блока опред ения осности подвижной единицы, а выходы первого, второго и второго, третьего путевых датчиков связаны соответственно с входами одного и другого блоков .контроля свободности путевого участка. между зонами действия датчиков, выход одного из которых соединен с одним из входов одного из блоков фиксации признака подвижньпс единиц и с одним входом элемента ИЛИ-НЕ, другой вход которого соединен с выходом другого блока контроля свободности путевого участка между зонами действия датчиков, с другим входом блока фиксации проследования подвижной единицы и одним входом элемента И, а выход соединен с одним из входов другого блока фиксации признака подвижных единиц, и другим входом первого блока фиксации признака подвижных единиц, блоки определения типа подвижной единицы, первые входы которых связаны соответственно с одним из выходов и с вторым и третьим выходами блока определения осности подвижной единицы, последние из которых соединены с входами первого элемента ИЛИ, а вторые входы блоков определения типа подвижной единицы связаны с выводами блоков фиксации признака подвижных единиц, третьи входы связаны с выходом элемента И, а выходы - с одними входами второго и третьего элементов ИЛИ, и имеющий счетный триггер блок ревер- сивноРо контроля.проследования подвижной единицы, один из входов ко
| Устройство для счета подвижных единиц железнодорожного транспорта | 1984 |
|
SU1284870A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
