Изобретение относится к работам по подъему затонувших объектов, например надводных кораблей, судов, подводных лодок, самолетов и других объектов деятельности человека, с целью их дальнейшего использования.
Известен способ подъема затонувшего объекта, заключающийся в приложении подъемно-тягового усилия к затонувшему объекту за счет движения надводных плавсредств и выбирания лебедками канатов, посредством которых и захватов надводные плавсредства связаны с затонувшим объектом.
Недостатки известного способа подъема затонувшего объекта - незначительная эффективность и неоперативность подъема затонувшего объекта.
Цель изобретения - повышение эффективности и оперативности подъема затонувшего объекта.
Цель достигается тем, что способ подъема затонувшего объекта заключается в закреплении захвата при помощи канатов на затонувшем объекте и в приложении к последнему подъемной силы за счет выборки упомянутых канатов соответствующими лебедками, установленными на надводных плавсредствах, посредством которых затонувший объект затем буксируют на мелководье. Канаты выбирают одновременно во время буксировки затонувшего объекта плавсредствами на расходящихся курсах.
Сущность изобретения и его отличительные от прототипа признаки состоят в том, что положительный эффект достигается за счет одновременной выборки канатов и буксировки затонувшего объекта надводными плавсредствами с установленными на них лебедками на расходящихся курсах в результате совмещения операций выборки канатов и буксировки затонувшего объекта.
Подъем затонувшего объекта выполняется следующим образом с соблюдением такой последовательности технологических операций. После обнаружения места залегания затонувшего объекта традиционными способами, вокруг него выставляют, например, гидроакустические маяки или телевизионные камеры. С помощью телекамер телевизионной системы наведения или гидроакустических маяков информация о месте залегания затонувшего объекта передается либо на мониторы телевизионной системы, либо на гидроакустические станции, находящиеся в ходовых рубках самоходных надводных плавсредств в поле видимости судоводителей. Используя получаемую таким образом информацию о месте залегания затонувшего объекта и информацию о расположении захватов, полученную, например визуально по местонахождению на поверхности воды сигнальных буев, связанных через трос сигнального буя с затонувшим объектом, судоводители стравливая канат, наводят захват на затонувший объект, подрабатывая при необходимости главными машинами самоходных надводных плавсредств, используя ход самоходных надводных плавсредств. Синхронизация движения и работы буксирных лебедок самоходных надводных плавсредств осуществляется по радиосвязи, например по УКВ или с помощью громкоговорящей связи. Захват затапливают в раскрытом положении рычагов. С помощью системы теленаведения захват заводят над затонувшим объектом и используя традиционное спуско-подъемное устройство, содержащее лебедку, балку (или кран), трос и устройство строповки, захват заводятся над водой, а затем опускаются в воду и под водой доставляют к затонувшему объекту. После спуска захвата и залегания его на затонувший объект, система теленаведения поставляет информацию о готовности захвата в комплексе с затонувшим объектом к подъему. Эта информация, например в виде телевизионного изображения, может поступать одновременно на телевизионные мониторы, находящиеся в ходовых рубках судоводителей буксиров. Получив такую информацию, судоводители дают указания по работе главных машин и ходе буксиров (курс, скорость, начало движения). Информация о залегании захвата относительно затонувшего объекта может быть получена также с помощью гидроакустических маяков и гидроакустических станций установленных на буксирах. Буксиры начинают движение относительно места залегания захвата и затонувшего объекта. Связь буксиров с канатом при их ходе на расходящихся курсах в разные стороны приводит к выбору провисания (слабины) каната, в качестве которого может быть использован стальной трос. Выбрав слабину, канат натягивается, и дальнейшее движение буксиров на противоположных или расходящихся курсах приводит к передаче усилий от движущихся буксиров через натянутый канат к концевым блокам полиспаста, которые установлены на противоположных рычагах захвата, пока еще раскрытых. При этом захват ведет себя, как ножницы. Разведение концов рычагов с одной стороны приводит к расхождению концов рычагов с другой стороны и наоборот. Так как при движении буксиров в противоположные стороны выбираемый канат тянет верхние концы рычагов вверх и в сторону буксира, то в результате действия захвата в силу конструктивных особенностей нижние концы рычагов сближаются между собой, захватывая в тиски затонувший объект. В дальнейшем буксиры продолжают расходиться на разных курсах, удаляясь друг от друга и от места первоначального залегания затонувшего объекта. Выбирание каната может осуществляться одновременно с ходом буксиров еще дополнительно и с помощью буксирных лебедок самих буксиров. Когда усилия, возникающие в натянутом канате и приложенные к рычагам захвата, превысят вес затонувшего объекта в воде и силы зацепления его с грунтом, захват с захваченным или затонувшим объектом компенсируется перемещением захвата по канату с помощью перекатывания блоков полиспаста по канату. После полного отрыва затонувшего объекта от грунта и подтягивания его к поверхности воды затонувший объект на растянутых концах каната вытаскивает на мелководные или на берег, например на далеко выходящую в море песчаную косу при ходе буксиров почти на параллельных расходящихся курсах. Дальнейший подъем осуществляется традиционными способами.
Информацию о местоположении затонувшего объекта можно получить с помощью сигнальных буев на поверхности воды, связанных через канаты с затонувшим объектом или грузами, расположенными вокруг него. При подъеме захвата к поверхности воды трос сигнального буя втягивается вовнутрь сигнального буя с помощью спиральной пружины или другого подобного механического устройства выбирания слабины троса. Захват можно заводить и наводить на затонувший объект с помощью сигнальных буев, пропустив тросы сигнальных буев через направляющие отверстия в захвате. В этом случае тросы сигнальных буев играют роль направляющих проводников. Использование запассованного полиспаста позволяет получить выигрыш в силе.
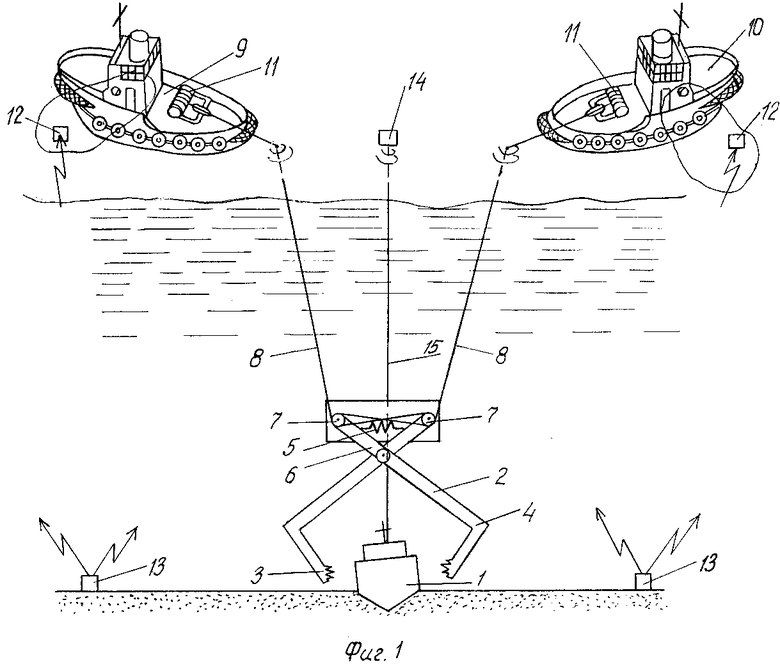
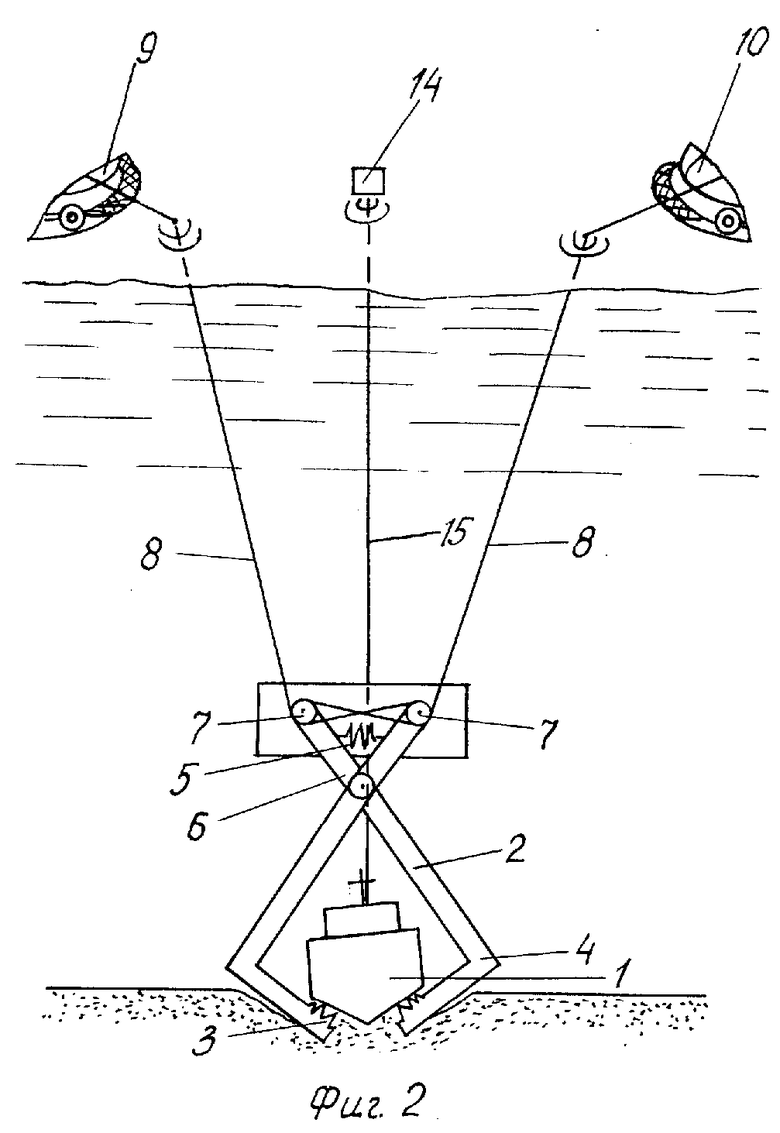
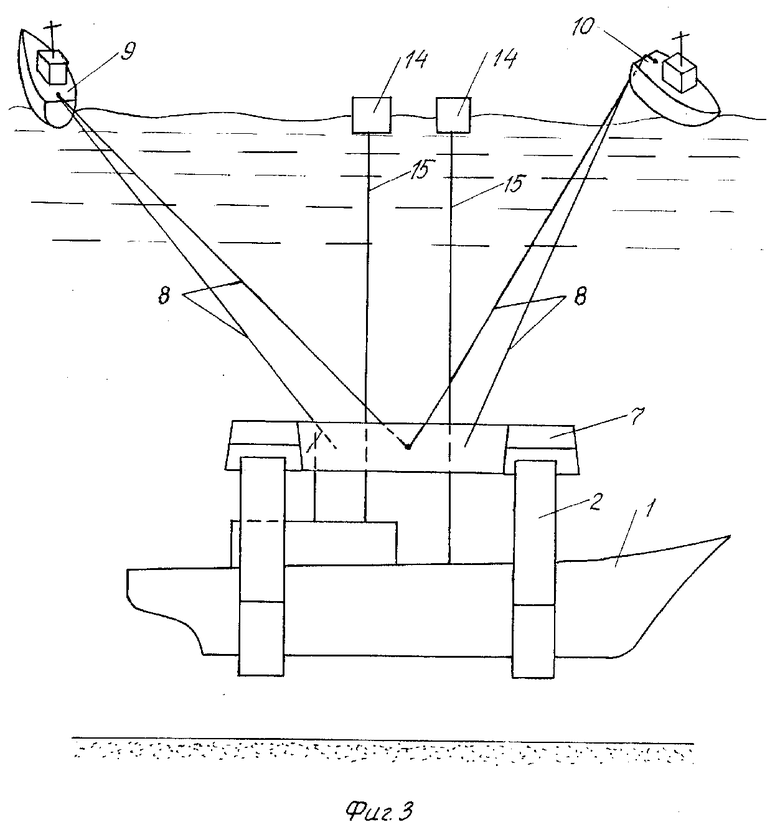
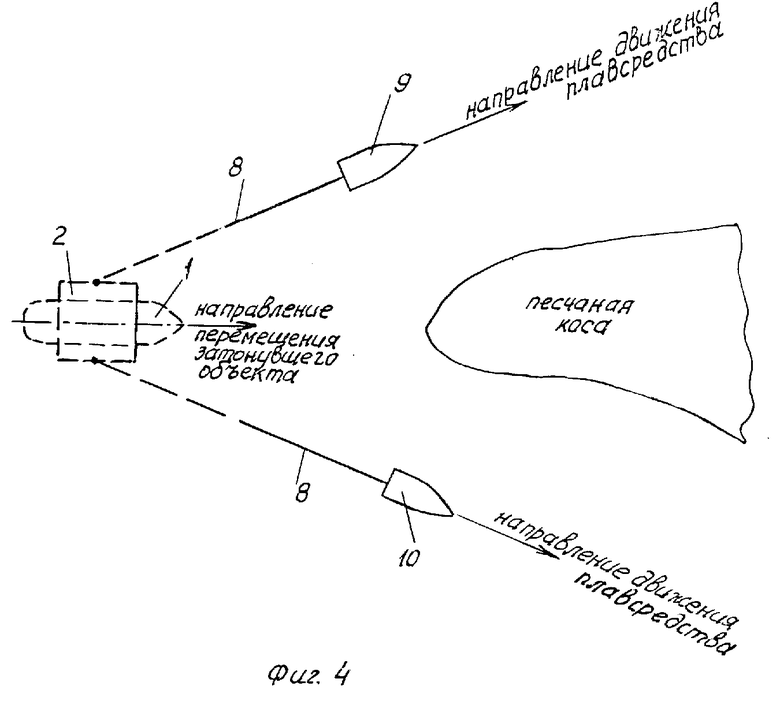
На фиг. 1 показано взаимное расположение элементов устройства, реализующего способ подъема затонувшего объекта, в момент времени заведения захвата над затонувшим объектом, вид с торца захвата; на фиг. 2 - захват под затонувшим объектом на грунте; на фиг. 3 - устройство, реализующее способ, в момент времени подтягивания затонувшего объекта к поверхности воды, вид сбоку захвата; на фиг. 4 - схема движения буксиров и затонувшего объекта с захватом при буксировке на мелководье или песчаную косу.
Способ подъема затонувшего объекта 1 заключается в следующей последовательности технологических операций. После спуска захвата 2 с захватывающими лапами 3 на нижних рычагах 4 и соединенных между собой упругим элементом 5 верхних рычагов 6 с концевыми блоками 7, через которые свободно пропущены концы канатов 8, закрепленные на двух 9, 10 и более самоходных надводных плавсредствах. например, буксирных с помощью буксирных лебедок 11 и буксирных устройств, контроля позиционирования захвата 2 относительно затонувшего объекта 1 и с помощью, например, телевизионного изобpажения взаимного расположения под водой захвата 2 и затонувшего объекта на экране телевизионных мониторов системы теленаведения 12 передаваемого от телекамер с телепередатчиками 13, и наведения захвата 2 на затонувший объект 1 при помощи, например, сигнальных буев 14 и соединенных через канаты-проводники 15 с затонувшим объектом 1, канаты 8 выбирают с помощью буксирных лебедок 11 и хода самоходных надводных плавсредств 9, 10, например, буксиров на противоположных или расходящихся курсах, с дальнейшим буксированием затонувшего объекта 1 на мелководье.
Устройство, реализующее способ подъема затонувшего объекта 1, содержит захват 2 с захватывающими лапами 3 на нижних рычагах 4, и соединенных между собой упругим элементом 5, например в виде винтовой пружины сжатия верхних рычагов 6 с концевыми блоками 7, запассованного полиспаста, через которые свободно пропущены концы канатов 8, закрепленные на двух 9, 10 и более самоходных надводных плавсредствах, например буксирах, с помощью буксирной лебедки 11 и буксирного устройства, системы теленаведения 12, телекамер с телепередатчиками 13, сигнальные буи 14, соединенные через канаты-проводники 15 с затонувшим объектом 1.
Способ подъема затонувшего объекта реализуется следующим образом. Вокруг затонувшего объекта 1 устанавливаются телекамеры с телепередатчиками 13, которые контролируют позиционирование захвата 2 и передают изображение затонувшего объекта 1 и относительное расположение захвата 2 в систему теленаведения 12 в виде телевизионного изображения на экране телевизионных мониторов, находящихся в ходовых рубках самоходных надводных плавсредств 9 и 10. Сигнальные буи 14 и соединенные с ним через канаты-проводники 15 соединяются с корпусом затонувшего объекта 1 и устанавливаются над ним. Захват 2 спускается с палубы одного из самоходных надводных плавсредств 9 или 10 с помощью спуско-подъемного устройства и тросов. На двух и более самоходных надводных плавсредствах 9 и 10, например, буксирах, с помощью буксирных устройств и буксирных лебедок 11 закрепляют канаты 8, которые свободно пропускают через концевые блоки 7 и запассовывают в полиспаст захвата 2, установленного на концах верхних рычагов 6 захвата 2. Канаты-проводники 15 пропускают через сквозные отверстия в захвате 2. Затем захват 2 в раскрытом положении спускают на затонувший объект 1 с помощью спуско-подъемного устройства и тросов. Захват наводят на затонувший объект 1 при помощи канатов-проводников 15, соединяющих сигнальные буи 14 с затонувшим объектом 1. Контроль позиционирования захвата 2 относительно затонувшего объекта 1 производится с помощью, например, подводных телекамер с телепередатчиками 13 и системы теленаведения 12.
Путем вытравливания канатов 8 с помощью буксирных лебедок 11 и буксирных устройств, а также хода и изменения курса самоходных надводных плавсредств 9 и 10 захват 2 наводят на затонувший объект 1 и опускают под водой на него, используя канаты-проводники 15 сигнальных буев 14 и в качестве направляющих проводников. При этом нижние рычаги 4 с захватывающими лапами 3 в результате действия упругого элемента 5, соединяющего верхние рычаги 6 между собой, например в виде винтовой пружины сжатия, находятся в раскрытом состоянии. После залегания предварительно раскрытого захвата 2 на затонувший объект 1 упругий элемент 5 отсоединяется одним концом от одного из верхних рычагов 6 в результате действия расцепителя, действующего под воздействием специального каната. Затем самоходные надводные плавсредства 9 и 10 начинают движение на противоположных или расходящихся курсах. При этом концы канатов 8, закрепленные на двух 9 и 10 самоходных надводных плавсредствах, например буксирах, с помощью буксирных лебедок 11 и буксирных устройств начинают расходиться в разные стороны, прилагая к концевым блокам 7, установленным на верхних штангах 6 усилия, в результате чего верхние рычаги 6 расходятся, а нижние рычаги 4 сближаются. Захватывающие лапы 3 упираются в затонувший объект 1 и сжимают его. При превышении вытягивающих сил со стороны самоходных надводных плавсредств 9 и 10 сил сцепления затонувшего объекта 1 с грунтом и его отрицательной плавучести захват 2 с захваченным им затонувшим объектом 1 начинают подниматься к поверхности воды. Волнение моря и неравномерность усилий, действующих на захват 2 со стороны самоходных надводных плавсредств 9, 10, компенсируются перекатыванием захвата 2 с помощью концевых блоков 7 запасованного полиспаста на канатах 8. При подъеме захвата 2 к поверхности воды канаты-проводники 15 втягиваются во внутрь сигнальных буев 14, например с помощью спиральной пружины или другого подобного механического устройства выбирания слабины троса. Одновременно с этим канаты 8 выбирают с помощью буксирных лебедок 11. После подъема затонувшего объекта 1 к поверхности воды на растянутых концах канатов 8, его вытаскивают на мелководье или на берег, например на далеко выходящий в море мыс или песчаную косу, которую с двух сторон огибают самоходные надводные плавсредства 9 и 10, с помощью которых проходит буксировка затонувшего объекта 1.
Использование изобретения позволит снизить трудозатраты и ускорить работы по подъему затонувшего объекта по сравнению с прототипом. В ряде случаев такой способ подъема затонувших объектов может оказаться единственно возможным и позволит осуществлять массовый экономически выгодный подъем затонувших объектов относительно малой массы с глубины до 300 м. В качестве объектов подъема могут быть затонувшие надводные корабли, суда, подводные лодки, самолеты и другие объекты деятельности человека с целью их дальнейшего использования. Оперативность способа может позволить спасать людей путем подъема затонувших объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070134C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070133C1 |
| Способ подъема затонувших объектов | 1990 |
|
SU1773796A1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2109654C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ПОДВОДНОЙ ЛОДКИ | 1991 |
|
RU2006425C1 |
| НАДВОДНОЕ СУДНО ДЛЯ ОЧИСТКИ ОТ ГРЯЗНОЙ ЖИДКОСТИ | 1991 |
|
RU2035349C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 1990 |
|
RU2025403C1 |
| УСТРОЙСТВО ДЛЯ ОТРЫВА ОТ ГРУНТА, ФИКСАЦИИ НА НЕКОТОРОЙ ВЫСОТЕ И ТРАНСПОРТИРОВАНИЯ НА МЕЛКОВОДЬЕ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК, ВКЛЮЧАЯ ТИП АПЛ "КУРСК" | 2000 |
|
RU2231472C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ СПАСАТЕЛЬНОЕ СУДНО ДОКОВОГО ТИПА | 2004 |
|
RU2282555C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1998 |
|
RU2200111C2 |
Использование: в работах по подъему затонувших объектов - подводных кораблей, судов, подводных лодок, самолетов и др. Сущность изобретения: подъем затонувшего объекта включает создание положительной плавучести за счет внешнего источника положительной плавучести, например в виде надводного плавсредства и затапливание захвата с помощью спуско-подъемного устройства, причем на двух или более самоходных надводных плавсредствах, например буксирах, с помощью буксирных устройств и буксирных лебедок закрепляют канаты, которые свободно пропускают через концевые блоки и запассовывают в полиспаст захвата, установленного на концах верхних рычагов захвата, и после спуска захвата в раскрытом положении на затонувший объект с помощью тросов, спуско-подъемного устройства и наведения захвата на затонувший объект при помощи канатов-проводников и сигнальных буев, контроля позиционирования захвата относительно затонувшего объекта с помощью подводных телекамер и системы подводного телевидения или гидроакустических маяков и станций канаты выбирают с помощью буксирных лебедок и хода самоходных надводных плавсредств, например буксиров, на противоположных или расходящихся курсах с дальнейшим буксированием затонувшего объекта на мелководье. 4 ил.
СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА, заключающийся в закреплении захвата при помощи канатов на затонувшем объекте и в приложении к последнему подъемной силы за счет выборки канатов соответствующими лебедками, установленными на надводных плавсредствах, посредством которых затонувший объект затем буксируют на мелководье, отличающийся тем, что выборку канатов осуществляют одновременно во время буксировки затонувшего объекта плавсредствами на расходящихся курсах.
