Изобретение относится к подъемно-транспортному машиностроению, а именно к конструкции стреловых самоходных кранов.
Известен ограничитель опрокидывающего момента для стреловых кранов с поворотной платформой и противовесом, содержащий смонтированные в нижней части платформы чувствительные элементы, установленные с круговой симметрией и связанные с переключателями, включенными в цепи управления исполнительных механизмов.
Недостатки прототипа - сложность конструкции, низкая точность срабатывания, невозможность установки на стреловых самоходных кранах.
Цель изобретения - обеспечение безопасной работы крана путем ограничения грузоподъемности и грузового момента.
Эта цель достигается тем, что в стреловом кране, содержащем ходовую часть, смонтированное на раме последней опорно-поворотное устройство с прикрепленной к нему стрелой, чувствительные элементы с цепью управления исполнительными механизмами крана, расположенные с круговой симметрией относительно оси опорно-поворотного устройства между последним и рамой с возможностью взаимодействия с ними, чувствительные элементы представляют собой три силоизмерительных датчика растяжения-сжатия, жестко закрепленные на раме и связанные цепью управления с приводами грузоприемных механизмов крана через пороговый элемент. С целью автоматического определения фактической производительности крана и режимов работы механизмов кран снабжен счетчиками времени и нагрузки, связанными с силоизмерительными датчиками.
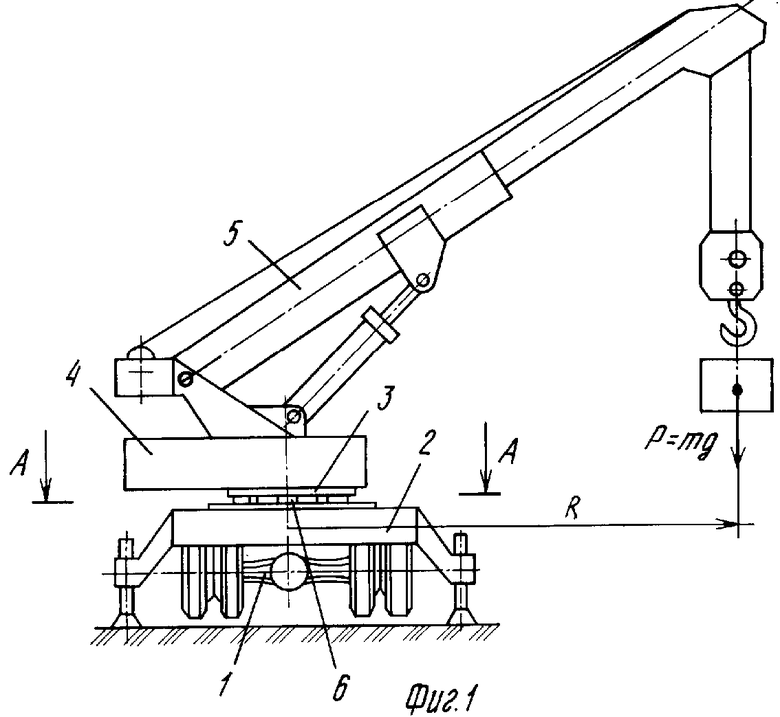
На фиг. 1 представлена конструкция крана; на фиг. 2 - разрез А-А на фиг. 1.
Стреловой кран содержит ходовую часть 1, собранную на раме 2, опорно-поворотное устройство 3, поворотную часть 4 со стрелой 5. Между опорно-поворотным устройством 3 и рамой ходовой части 2 с круговой симметрией расположены универсальные силоизмерительные датчики 6.
При подъеме груза массой m на вылете R на опорно-поворотное устройство действуют сила P = mg, где g - ускорение свободного падения, и момент M = PR. При этом на каждый из силоизмерительных датчиков будут действовать силы Fi, i = 1,2,3, пропорциональные грузовому моменту или массе поднимаемого груза. При превышении грузового момента или веса поднимаемого груза система обработки сигналов силоизмерительных датчиков отключает грузовые лебедки механизма подъема.
Поскольку по сигналам Ui с силоизмерительных датчиков можно определить массу поднимаемого груза и грузовой момент, то при использовании в системе обработки сигналов силоизмерительных датчиков датчика времени, регистрирующего время работы каждого из механизмов крана, можно определить действительную производительность крана, а также режим работы каждого из механизмов.
Информация о производительности и режиме работы может находиться в счетчиках системы обработки сигналов датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК РАСТЯЖЕНИЯ | 1991 |
|
RU2017095C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СЖАТИЯ | 1991 |
|
RU2017096C1 |
| СИСТЕМА КОНТРОЛЯ ГРУЗОВОЙ УСТОЙЧИВОСТИ МОБИЛЬНЫХ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2267458C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ НА КРАНАХ | 1992 |
|
RU2069320C1 |
| Способ подъема груза | 2019 |
|
RU2703097C1 |
| СИСТЕМА УПРАВЛЕНИЯ СТРЕЛОВОГО САМОХОДНОГО КРАНА БЕЗ ПОВОРОТНОЙ ЧАСТИ | 2019 |
|
RU2721210C1 |
| СПОСОБ ПОДЪЕМА ГРУЗОВ МОБИЛЬНЫМ КРАНОМ | 2012 |
|
RU2518834C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| САМОХОДНЫЙ ДВУХСТРЕЛОВОЙ КРАН | 2011 |
|
RU2465191C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОВОЙ УСТОЙЧИВОСТЬЮ МОБИЛЬНОГО ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349536C1 |

Использование: в конструкции стреловых самоходных кранов. Сущность изобретения: между рамой ходовой части крана и опорно-поворотным устройством с круговой симметрией расположены три универсальных силоизмерительных датчика растяжения-сжатия. С целью автоматического определения фактической производительности крана и режима работы механизмов кран снабжен системой обработки сигналов силоизмерительных датчиков, содержащей датчик времени и счетчики производительности и режимов работы. 1 з. п. ф-лы, 2 ил.
