Изобретение относится к подъемно-транспортному машиностроению, в частности, к системам управления крана без поворотной части, кранов-трубоукладчиков.
Известна система [1] безопасности крана стрелового типа, содержащая блок защиты от опасного напряжения, контроллер оголовка стрелы, к входу которого подключены датчики параметров навесного оборудования, а к выходу - модуль включения исполнительных устройств, управляющий контроллер, к входу которого подключены органы управления навесным оборудованием, датчик максимальной высоты подъема грузозахватного органа, модуль аварийной сигнализации, модуль блокировки движений, к входу которого подключен датчик включения механизма опускания грузозахватного органа.
Недостатком системы является низкая надежность и конструктивная сложность, обусловленные такими факторами, как:
- наличие блока защиты от опасного напряжения, который срабатывает на проводимые рядом электросварочные работы, учитывая специфику работы крана без поворотной части, крана-трубоукладчика;
- наличие контроллера оголовка стрелы и его ограниченная функциональность, в случае отказа которого, система не получит данные параметров датчиков навесного оборудования;
- модульное построение системы, в случае отказа любого модуля влечет отказ системы целиком;
- система управляет краном только дискретно;
- наличие избыточного количества датчиков, что приводит к усложнению конструкции системы.
- наличие в системе безопасности крана цифровых и аналоговых датчиков угла, выполненных на базе электронных компонентов. Кроме того, указанные датчики угла имеют хрупкий алюминиевый корпус и поэтому сильно подвержены механическим деформациям, климатическим, погодным, температурным воздействиям. Таким датчикам свойственна низкая ремонтопригодность и надежность. Указанные датчики измеряют только угол наклона стрелы.
Известна система [2] безопасности и управления стрелового крана с гидравлическим приводом, содержащая установленный на кране прибор безопасности, содержащий контроллер периферийных устройств, блок согласования интерфейсов, аппаратуру электроуправления гидравлическим приводом.
Недостатком системы является низкая надежность и сложность системы, обусловленная таким факторами как:
- наличие блока согласования интерфейсов, без которого интерфейс системы безопасности будет не согласован с другими интерфейсами крана;
- наличие дополнительной аппаратуры электроуправления гидравлическим приводом, в случае отказа которой невозможно управлять краном.
- наличие в системе безопасности крана цифровых и аналоговых датчиков угла, выполненных на базе электронных компонентов. Кроме того, указанные датчики угла имеют хрупкий алюминиевый корпус и, поэтому сильно подвержены механическим деформациям, климатическим, погодным, температурным воздействиям. Таким датчикам свойственна низкая ремонтопригодность и надежность. Указанные датчики измеряют только угол наклона стрелы.
Наиболее близким к заявленному изобретению является устройство [3] безопасности машины с графическим дисплеем, содержащее процессор, датчики нагрузки и пространственного положения, выходное устройство, исполнительные устройства машины, органы управления, дисплей, блок памяти, видеокамеру с приводом.
Недостатком устройства является низкая надежность и сложность, обусловленная такими факторами, как:
- наличие выходного устройства, в случае отказа которого невозможно формировать выходные сигналы;
- наличие внешнего блока, в случае отказа которого невозможны операции с памятью.
- наличие в системе безопасности крана цифровых и аналоговых датчиков угла, выполненных на базе электронных компонентов. Кроме того, указанные датчики угла имеют хрупкий алюминиевый корпус и, поэтому сильно подвержены механическим деформациям, климатическим, погодным, температурным воздействиям. Таким датчикам свойственна низкая ремонтопригодность и надежность. Указанные датчики измеряют только угол наклона стрелы.
Технический результат заявленного изобретения заключается в повышении надежности, упрощении конструкции системы управления крана без поворотной части.
Задачей, на решение которой направлено изобретение, является создание надежной системы управления крана без поворотной части упрощенной конструкции.
Поставленная задача решается за счет того, что система управления стрелового самоходного крана без поворотной части, согласно изобретению, содержит соединенные друг с другом контроллер и дисплей-контроллер, к выходам которых подключены устройство световой сигнализации, устройство звуковой сигнализации, устройства управления краном, к входам контроллера подключены аналоговые датчики рабочего оборудования крана, например датчики давления, датчики усилия, датчики угла и цифровые датчики, посредством CAN-линии, элементы управления, концевые выключатели, при этом контроллер и дисплей-контроллер выполнены с возможностью запуска алгоритма работы и настройки системы управления, ведения лога системы, формирования электрических сигналов для дискретного или пропорционального управления краном, при этом дисплей-контроллер дополнительно выполнен с возможностью коммутации с аналоговыми датчиками рабочего оборудования крана и цифровыми датчиками посредством CAN-линии, при этом каждый аналоговый датчик угла содержит герметичный заполненный демпфирующей жидкостью корпус, внутри которого установлен чувствительный элемент, на котором размещен маятник, выполненный с возможностью отклонения на угол 110 градусов, состоящий из плеча с осью, на которой закреплены отвесы.
Одним существенным признаком заявленной системы управления является наличие в ней дисплея-контроллера, который может коммутировать с цифровыми датчиками рабочего оборудования крана посредством CAN-линии и аналоговыми датчиками, что позволяет формировать электрические сигналы для дискретного или пропорционального управления краном, а в случае выхода из строя контроллера, дисплей-контроллер обеспечивает выполнение алгоритма работы и настройки системы управления, осуществляет запись лога системы управления, формирование электрических сигналов для дискретного или пропорционального управления краном без поворотной части, что позволяет повысить надежность системы управления.
Еще одним существенным признаком заявленной системы управления является то, что для получения информации о положении рабочих элементов стрелового самоходного крана без поворотной части, используются датчики угла маятниковые аналоговые (ДУМА), каждый из которых содержит герметичный корпус, защищающий внутренние элементы от климатических изменений, механических повреждений, температурных колебаний окружающей среды, внутри корпуса закреплен чувствительный элемент - потенциометр, на который установлен маятник, выполненный с возможностью отклонения на угол 110 градусов, состоящий из плеча с осью, с закрепленными на ней отвесами, при этом корпус заполнен демпфирующей жидкостью, смягчающей колебания маятника и защищающей от климатических температурных изменений. Первый ДУМА расположен на стеле крана-трубоукладчика без поворотной части и измеряет угол наклона стрелы. Второй ДУМА расположен на кране крана-трубоукладчика без поворотной части и измеряет угол поперечного наклона крана, например, ДУМА-2 может быть расположен на переднем или заднем борту крана. Третий ДУМА расположен на кране крана-трубоукладчика без поворотной части и измеряет угол продольного наклона крана. Такая конструкция датчиков угла маятниковых аналоговых в совокупности со схемой их установки позволяет повысить надежность системы управления стрелового самоходного крана без поворотной части в целом, а также упростить его конструкцию, поскольку, с учетом конструктивных особенностей ДУМА, обеспечивается их взаимозаменяемость в случае неисправности.
На фиг. 1 изображена блок-схема системы безопасности крана без поворотной части, выполненная в соответствии с заявленным изобретением.
На фиг. 2-4 представлены блок-схемы алгоритма работы стрелового самоходного крана без поворотной части.
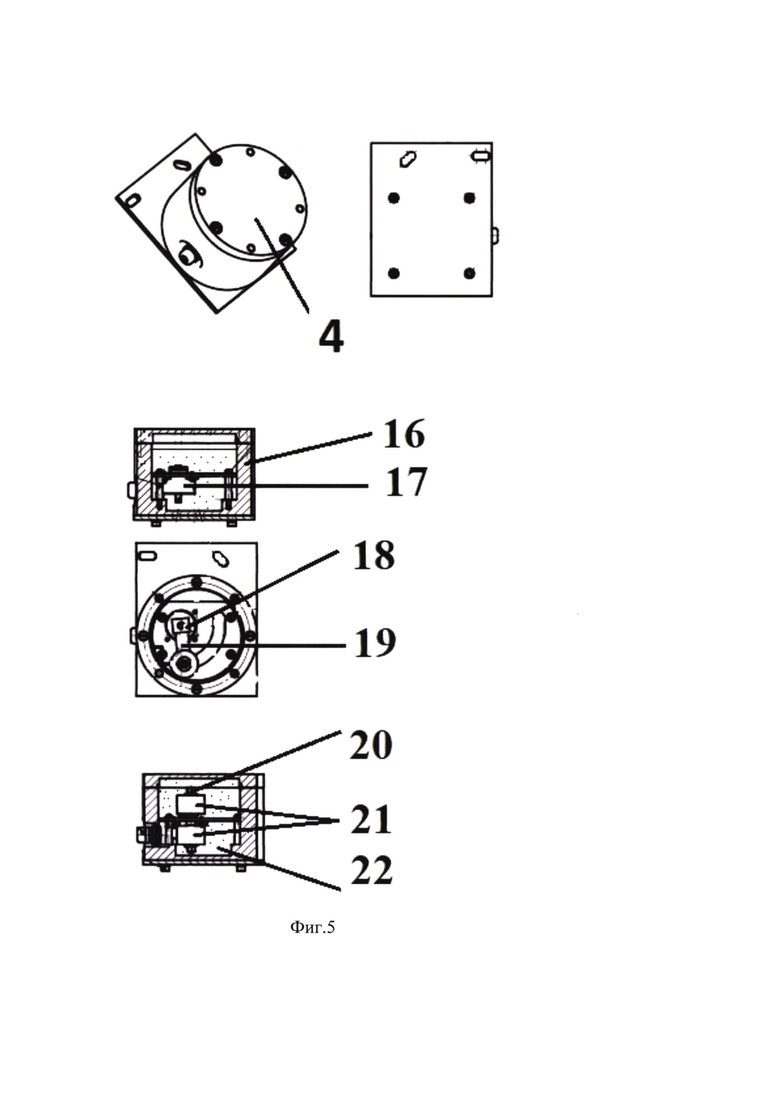
На фиг. 5 изображен датчик угла маятниковый аналоговый, выполненный в соответствии с заявленным изобретением.
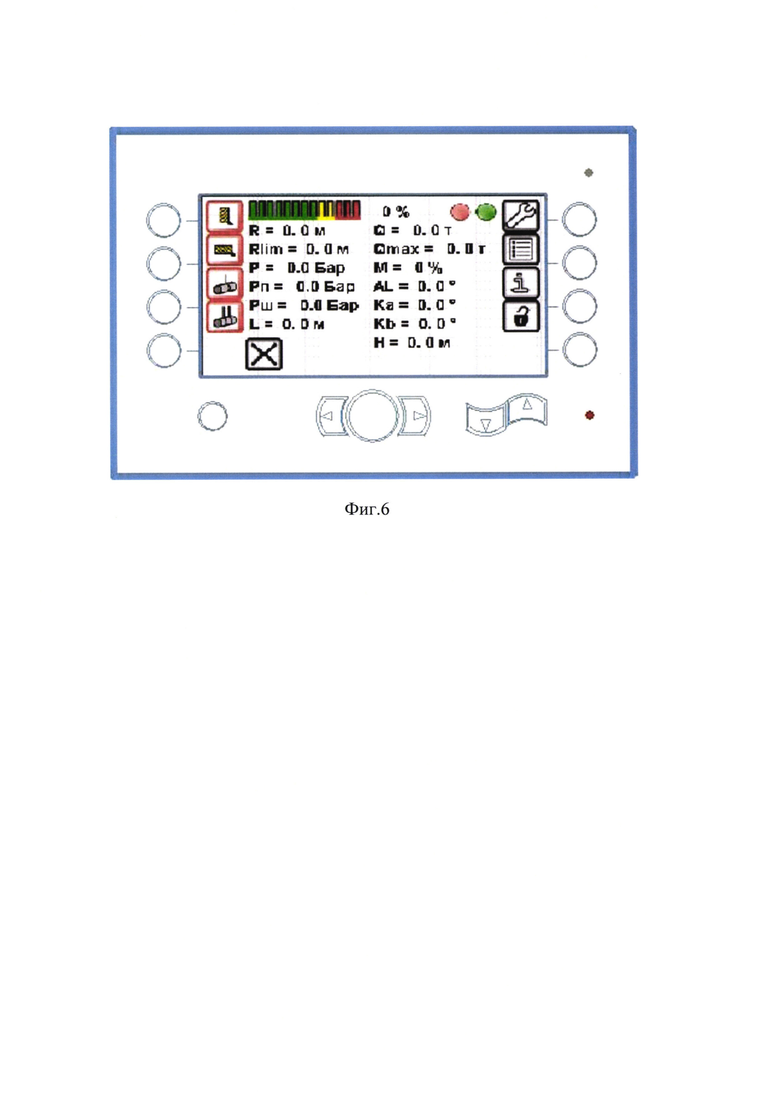
На фиг. 6 представлен вид графического изображения, формируемого дисплеем-контроллером.
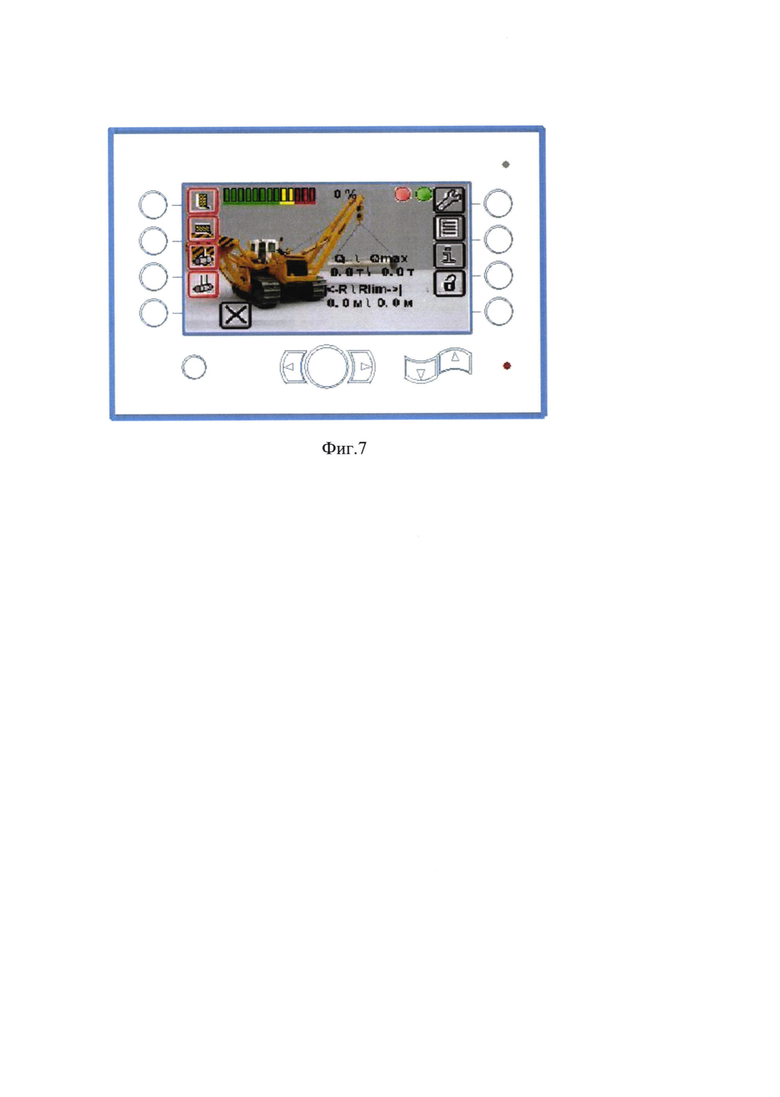
На фиг. 7 представлен вид графического изображения крана-трубоукладчика, представленного на дисплее-контроллере.
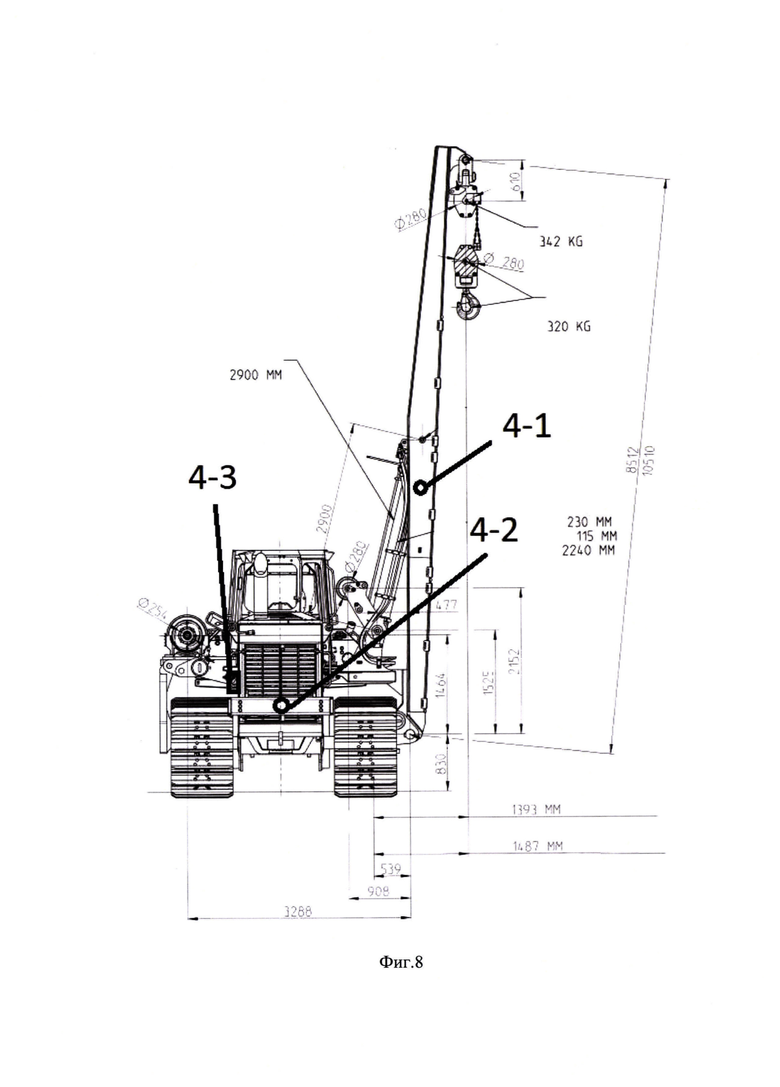
На фиг. 8 представлена схема крана-трубоукладчика с параметрами.
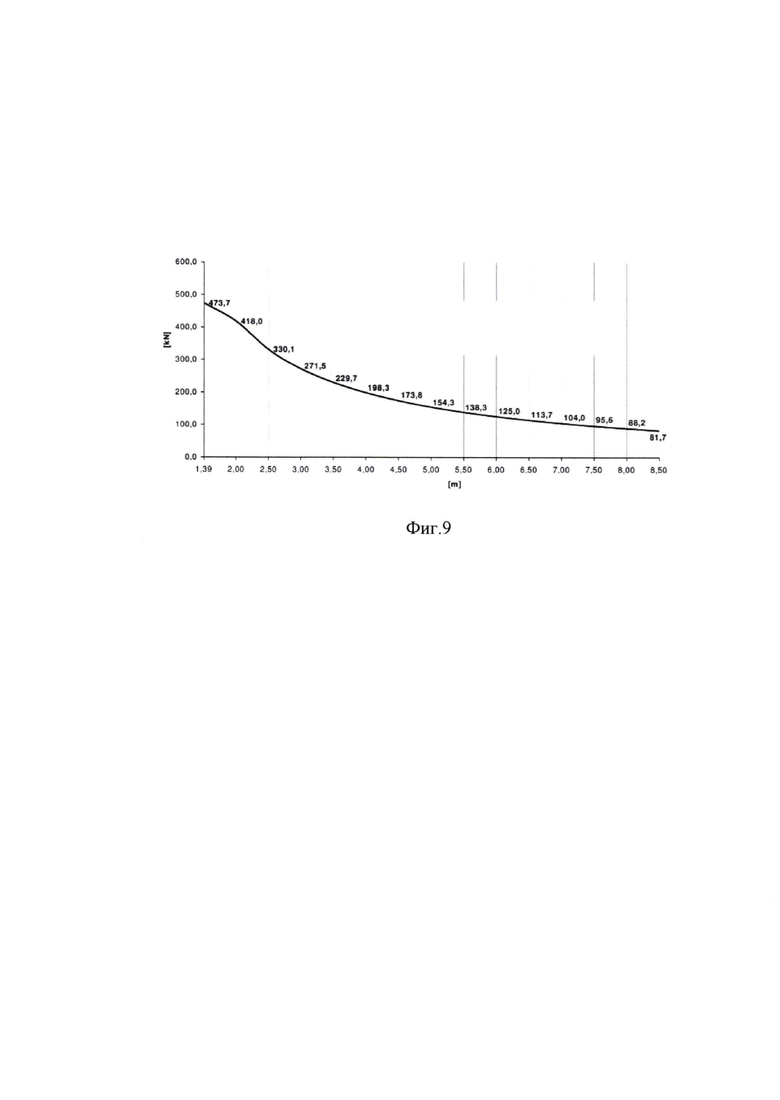
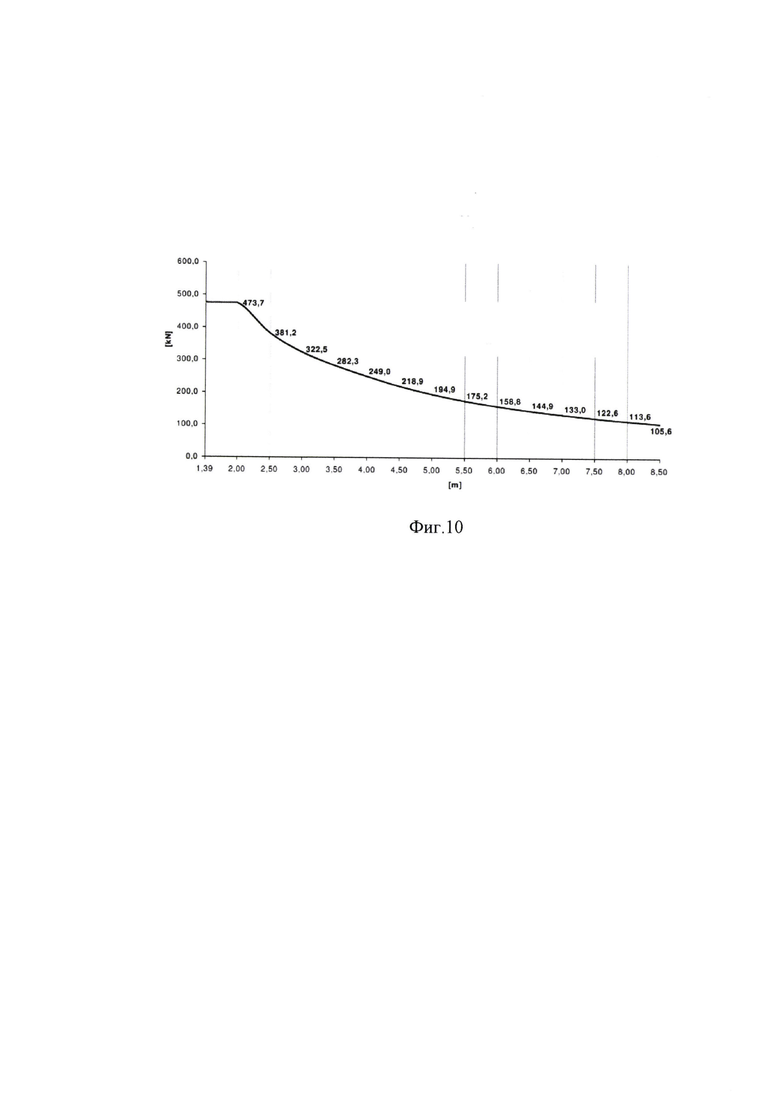
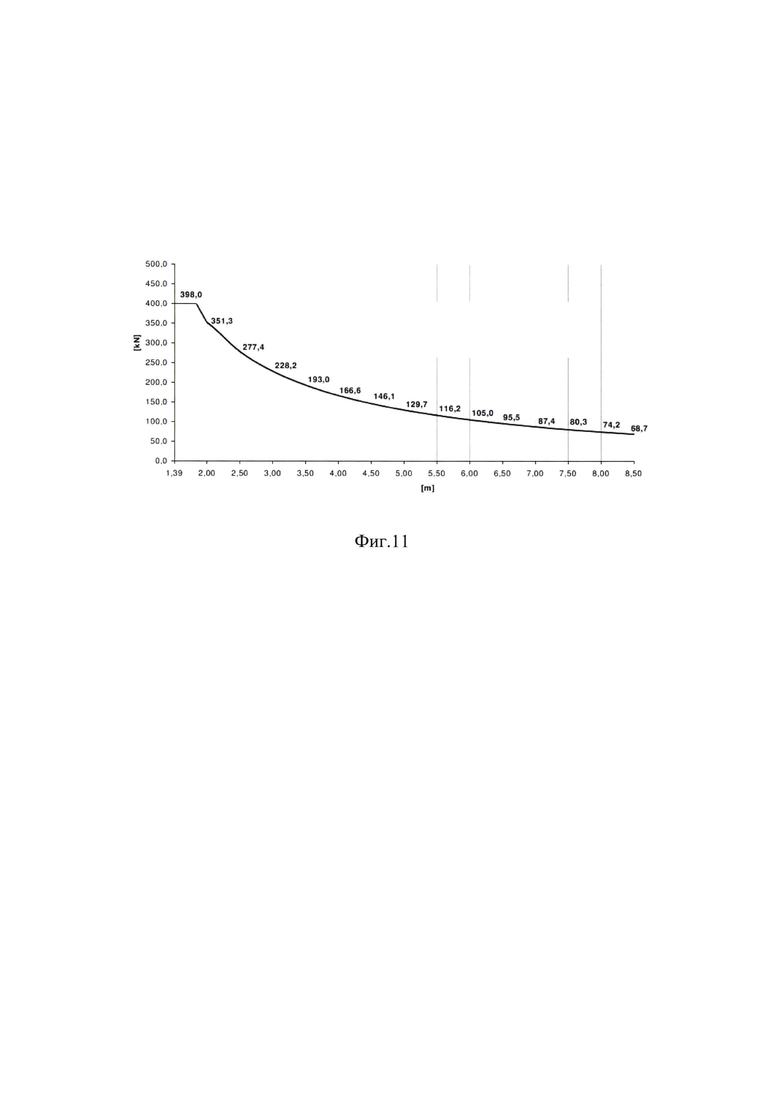
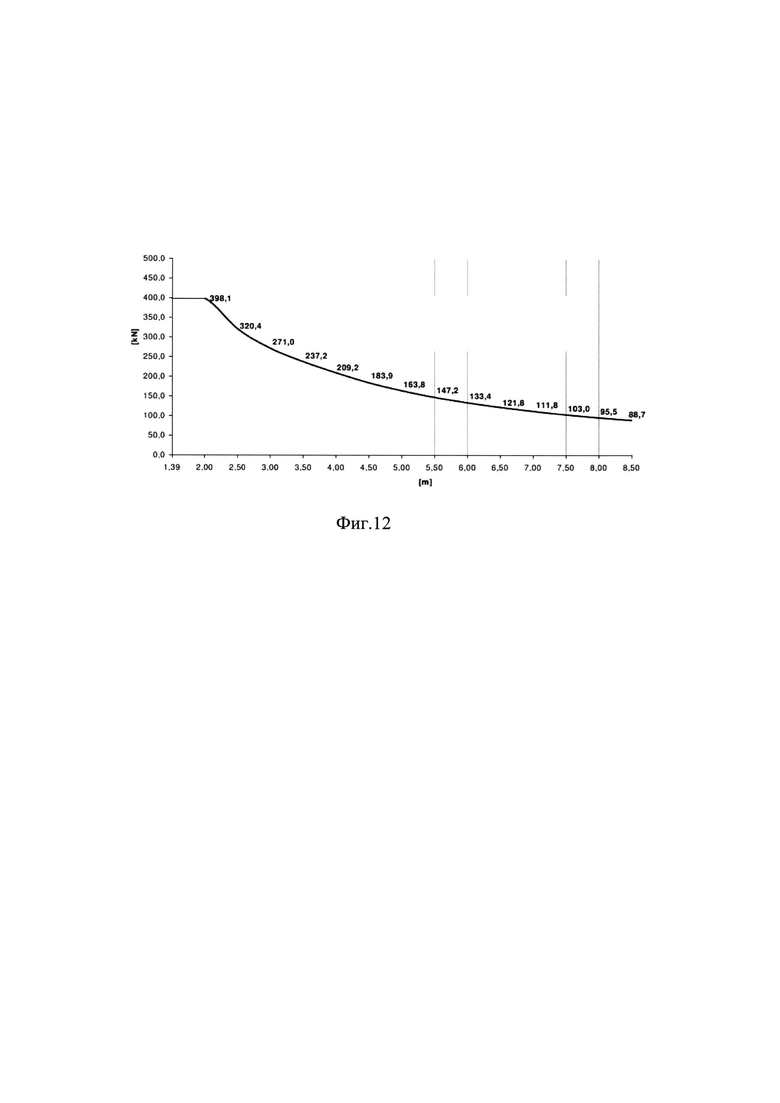
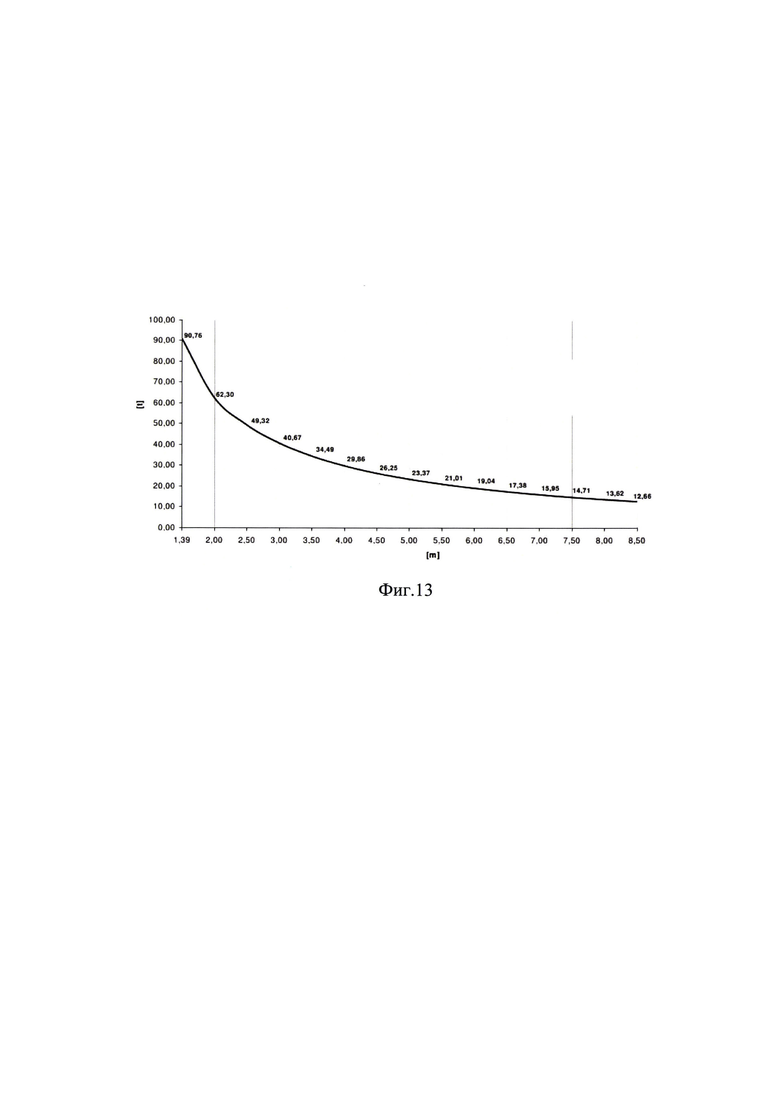
На фиг. 9-13 представлены графики грузовых характеристик, в соответствии с которыми осуществляется реализация заявленной системы и функционирование алгоритма работы и настройки.
Как показано на фиг. 1, система управления (СУ) стрелового самоходного крана без поворотной части содержит контроллер (1), к входам которого подключены гидравлические датчики (3) давления аналоговые или датчик (8) усилия аналоговый, датчики (4) угла маятниковые аналоговые, концевые выключатели (5).
К выходам контроллера (1) подключены устройство (6) световой сигнализации, устройство (7) звуковой сигнализации, устройства (15) управления краном.
Контроллер (1) обеспечивает запуск алгоритма работы и настройки системы управления, ведение лога системы управления, формирование электрических сигналов для дискретного или пропорционального управления краном.
Контроллер (1) имеет возможность коммутировать с элементами (13) управления аналоговыми, с датчиками (14), с цифровыми датчиками (9, 10, 11) и элементами (12) управления цифровыми посредством CAN линии.
Система управления содержит дисплей-контроллер (2), к выходам которого подключены устройство (6) световой сигнализации, устройство (7) звуковой сигнализации, контроллер (1), устройства (15) управления краном.
Дисплей-контроллер (2) обеспечивает запуск алгоритма работы и настройки системы управления, ведение лога системы, формирование электрических сигналов для дискретного или пропорционального управления краном.
Дисплей-контроллер (2) имеет возможность коммутировать с аналоговыми датчиками (3, 4, 8), концевыми выключателями (5), элементами (13) управления аналоговыми, с датчиками (14), с цифровыми датчиками (9, 10, 11) и элементами (12) управления цифровыми посредством CAN линии.
Заявленная система управления стрелового самоходного крана-трубоукладчика без поворотной части работает следующим образом.
В одном режиме работы стрелового самоходного крана без поворотной части, изначально контроллер (1) выполняет функцию ведущего устройства (MASTER), а дисплей-контроллер (2) выполняет функцию ведомого устройства (SLAVE). Контроллер (1) собирает аналоговые сигналы с датчиков (3) давления или датчиков (8) усилия, датчиков (4) угла, концевых выключателей (5). Затем, контроллер (1) оцифровывает полученные аналоговые сигналы с датчиков (3, 8, 4) и выключателей (5), преобразует, посредством работающего в нем алгоритма способа работы и настройки системы управления, в цифровые управляющие сигналы для дискретного или пропорционального управления стреловым самоходным краном без поворотной части и электрические сигналы, после чего направляет их в устройства (15) управления стреловым самоходным краном без поворотной части краном, устройство (6) световой сигнализации, и направляет в дисплей-контроллер (2) через CAN-линию. Дисплей-контроллер (2) формирует графические изображения (фиг. 6 и 7) стрелового самоходного крана без поворотной части и цифровой последовательный код. Кроме того, дисплей-контроллер (2) формирует электрические и цифровые сигналы и ведет лог системы. Полученные электрические сигналы используются для устройства (6) световой сигнализации, устройства (7) звуковой сигнализации, для дискретного или пропорционального управления стреловым самоходным краном без поворотной части.
Например, при работе стрелового самоходного крана без поворотной части, дисплей-контроллер (2) выполняет следующие функции:
- формирует графические изображения стрелового самоходного крана без поворотной части и цифровой последовательный код. На графическом изображении формируются следующие данные (параметры): внешний вид крана, значение веса поднимаемого груза, значение веса разрешенного груза, значение расстояния от трака до груза, значение расстояния на которое можно перенести данный груз, значение загрузки системы управления и другие.
- формирует электрические сигналы для устройства (6) световой сигнализации и устройства (7) звуковой сигнализации,
- формирует цифровые сигналы для дискретного или пропорционального управления стреловым самоходным краном без поворотной части,
- ведет лог системы.
В качестве устройства (6) световой сигнализации, которое коммутирует с дисплеем-контроллером (2), могут быть использованы цветные светодиоды или лампы, установленные в кабине оператора.
В качестве устройства (6) звуковой сигнализации, которое коммутирует с дисплеем-контроллером (2), может использоваться, например, звуковая колонка, установленная в кабине оператора.
В результате такой конфигурации системы управления обеспечивается контроль всех узлов стрелового самоходного крана без поворотной части.
В случае работы стрелового самоходного крана без поворотной части в колонне с другими стреловыми самоходными кранами без поворотной части, например, кранами-трубоукладчиками, при подъеме одного груза (длинной газовой трубы, или негабаритного груза) несколькими стреловыми самоходными кранами без поворотной части, контроллер (1) формирует электрические сигналы для устройства (6) световой сигнализации в форме светового последовательного кода. В качестве устройства (6) световой сигнализации, которое коммутирует с контроллером (1), может использоваться, например, проблесковый маячок оранжевого цвета, установленный на крыше или капоте стрелового самоходного крана без поворотной части. Сигналы, выдаваемые устройством (6) световой сигнализации, учитываются как оператором данного стрелового самоходного крана без поворотной части, так и операторами других стреловых самоходных кранов без поворотной части, кранов-трубоукладчиков, если все указанные стреловые самоходные краны без поворотной части работают в колонне.
В еще одном режиме работы стрелового самоходного крана без поворотной части, изначально контроллер (1) выполняет функцию ведущего устройства (MASTER), и дисплей-контроллер (2) выполняет функцию ведомого устройства (SLAVE), находящегося в нерабочем состоянии. Контроллер (1) собирает аналоговые сигналы с датчиков (3) давления или датчиков (8) усилия, датчиков (4) угла, концевых выключателей (5). Затем контроллер (1) оцифровывает полученные аналоговые сигналы с датчиков (3, 8, 4) и выключателей (5), преобразует, посредством работающего в нем алгоритма работы и настройки системы управления, в цифровые управляющие сигналы для дискретного или пропорционального управления стреловым самоходным краном без поворотной части, электрические сигналы, и направляет их в устройства (15) управления стреловым самоходным краном без поворотной части, устройство (6) световой сигнализации. Так как дисплей-контроллер (2) находится в нерабочем состоянии, контроллер (1) начинает вести лог системы и подавать электрические сигналы на устройство (7) звуковой сигнализации.
Например, в случае выхода из строя дисплея-контроллера (2), дисплей-контроллер (2):
- не формирует графические изображения стрелового самоходного крана без поворотной части и цифровой последовательный код,
- не формирует электрические сигналы для устройства (6) световой сигнализации (6) и устройства (7) звуковой сигнализации,
- не формирует цифровые сигналы для дискретного или пропорционального управления краном,
- не ведет лог системы.
В результате выхода из строя дисплея-контроллера (2), некоторые узлы стрелового самоходного крана без поворотной части, например, двигатель крана, если он управляется по CAN-линии, остаются без управления, оператор крана не может управлять указанным краном. Если указанный кран работает в колонне с другими стреловыми самоходными кранами без поворотной части, например, кранами-трубоукладчиками, т.е. в случае, когда несколько стреловых самоходных кранов без поворотной части, например, кранов-трубоукладчиков поднимают один груз (длинную газовую трубу или другой негабаритный груз), возникает опасная ситуация. В этот момент контроллер (1) получает по CAN-линии код о том, что дисплей-контроллер (2) вышел из строя и начинает исполнять часть его функций:
- формирует электрические сигналы для устройства (6) световой сигнализации и устройства (7) звуковой сигнализации в форме светового последовательного кода и звукового последовательного кода. В качестве устройства (7) звуковой сигнализации, которое коммутирует с контроллером (1), может использоваться, например, автоклаксон, установленный под капотом стрелового самоходного крана без поворотной части. Сигналы, выдаваемые устройством (6) световой сигнализации, учитываются оператором данного стрелового самоходного крана без поворотной части, так операторами других стреловых самоходных кранов без поворотной части, кранов-трубоукладчиков, если все указанные стреловые самоходные краны без поворотной части работают в колонне.
- формирует цифровые сигналы для дискретного или пропорционального управления стреловым самоходным краном без поворотной части,
- ведет лог системы.
В результате, при включении в работу контроллера (1) вместо нерабочего дисплея-контроллера (2), оператор, благодаря
последовательному звуковому коду и последовательному световому коду, может продолжить работу до ремонта или замены дисплея-контроллера (2).
В еще одном работы системы управления стрелового самоходного крана без поворотной части, изначально контроллер (1) выполняет функцию ведомого устройства (SLAVE), и дисплей-контроллер (2) выполняет функцию ведущего устройства (MASTER). В реализации такой конфигурации, контроллер (1) собирает аналоговые сигналы с датчиков (3) давления или датчиков (8) усилия, датчиков (4) угла, концевых выключателей (5). Затем контроллер (1) оцифровывает полученные аналоговые сигналы с датчиков (3, 8, 4) и выключателей (5) и направляет их в дисплей-контроллер (2) через CAN-линию, который посредством работающего в нем алгоритма работы и настройки системы управления стрелового самоходного крана без поворотной части:
- преобразует полученные сигналы в цифровые управляющие сигналы для дискретного или пропорционального управления стреловым самоходным краном без поворотной части,
- формирует графические изображения (фиг. 6 и 7) стрелового самоходного крана без поворотной части и цифровой последовательный код,
- ведет лог системы,
- формирует электрические сигналы и направляет их на устройство (6) световой сигнализации и устройство (7) звуковой сигнализации.
Затем дисплей-контроллер (2) направляет цифровые управляющие сигналы через CAN-линию в управляющие органы крана и контроллер (1). Контроллер (1) управляет краном дискретно или пропорционально, формирует электрические сигналы и направляет их на устройство (6) световой сигнализации, все это на основе цифровых управляющих сигналов, полученных после вычисления в дисплее - контроллере (2).
В еще одном режиме работы стрелового самоходного крана без поворотной части (крана-трубоукладчика), изначально контроллер (1) выполняет функцию ведомого устройства (SLAVE), и дисплей-контроллер (2) выполняет функцию ведущего устройства (MASTER). Когда дисплей-контроллер (2) находится в нерабочем состоянии, контроллер (1) становится ведущим устройством (MASTER), выполняя часть функций дисплея-контроллера (2). Контроллер (1) собирает аналоговые сигналы с датчиков (3) давления (3) или датчиков (8) усилия, датчиков (4) угла, концевых выключателей (5). Затем контроллер (1) оцифровывает полученные аналоговые сигналы с датчиков (3, 8, 4) и выключателей (5), преобразует, посредством работающего в нем алгоритма работы и настройки системы управления стрелового самоходного крана без поворотной части, в цифровые управляющие сигналы для дискретного или пропорционального управления краном, электрические сигналы, и направляет их в устройства (14) управления краном, устройство (6) световой сигнализации. Кроме того, контроллер (1) начинает писать лог системы.
Например, при работе стрелового самоходного крана без поворотной части происходит выход из строя дисплея-контроллера (2). Дисплей-контроллер (2)
- не реализует алгоритм работы и настройки системы управления,
- не формирует графические изображения стрелового самоходного крана без поворотной части и цифровой последовательный код,
- не формирует электрические сигналы для устройства (6) световой сигнализации и устройства (7) звуковой сигнализации,
- не формирует цифровые сигналы для дискретного или пропорционального управления стреловым самоходным краном без поворотной части,
- не ведет лог системы.
В результате выхода из строя дисплея-контроллера (2) некоторые узлы стрелового самоходного крана без поворотной части остаются без управления, оператор крана не может управлять краном, а если кран работает в колонне с другими кранами-трубоукладчиками, это когда несколько кранов поднимают один груз (длинную газовую трубу или другой негабаритный груз), возникает опасная ситуация. В этот момент контроллер (1) получает по CAN-линии код о том, что дисплей-контроллер (2) вышел из строя и начинает исполнять часть его функций:
- запускает алгоритм работы и настройки системы управления,
- формирует электрические сигналы для устройства (6) световой сигнализации и устройства (7) звуковой сигнализации (7): световой последовательный код и звуковой последовательный код. В качестве устройства (7) звуковой сигнализация, которое коммутирует с контроллером (1), может использоваться, например, крановый клаксон установленный под капотом стрелового самоходного крана без поворотной части. Сигналы, выдаваемые устройством (6) световой сигнализации, учитываются оператором данного стрелового самоходного крана без поворотной части, так операторами других стреловых самоходных кранов без поворотной части, кранов-трубоукладчиков, если все указанные стреловые самоходные краны без поворотной части работают в колонне.
- формирует цифровые сигналы для дискретного или пропорционального управления краном,
- ведет лог системы.
В результате включения в работу контроллера (1), вместо нерабочего дисплея-контроллера (2), оператор, благодаря последовательному звуковому коду и последовательному световому может продолжить работу до ремонта или замены дисплея-контроллера (2).
Дополнительно контроллер (1) собирает аналоговые сигналы с трех аналоговых маятниковых датчиков (4) угла (далее - ДУМА). Эти датчики взаимозаменяемы.
Как показано на фиг. 8, первый ДУМА (4-1) расположен на стеле стрелового самоходного крана без поворотной части (крана-трубоукладчика) и измеряет угол наклона стрелы.
Второй ДУМА (4-2) расположен на кране стрелового самоходного крана без поворотной части (крана-трубоукладчика) и измеряет угол поперечного наклона крана. Например, второй ДУМА (4-2) может быть расположен на переднем или заднем борту стрелового самоходного крана без поворотной части.
Третий ДУМА (4-3) расположен на кране стрелового самоходного крана без поворотной части (крана-трубоукладчика) и измеряет угол продольного наклона крана. Например, третий ДУМА (4-3) может быть расположен на левом или правом борту крана.
В случае неисправности первого ДУМА (4-1), второй ДУМА (4-2) или третий ДУМА (4-3) устанавливают на место первого ДУМА (4-1), а именно, на стелу стрелового самоходного крана без поворотной части (крана-трубоукладчика).
В случае неисправности второго ДУМА (4-2), третий ДУМА (4-3) устанавливают на место второго ДУМА (4-2).
Как показано на фиг. 5, каждый аналоговый датчик (4) угла (первый, второй, третий ДУМА) содержит герметичный корпус (16), защищающий внутренние элементы от климатических изменений, механических повреждений, температурных колебаний окружающей среды. Внутри герметичного корпуса закреплен чувствительный элемент - потенциометр (17), на который установлен маятник (18), выполненный с возможностью отклонения на угол 110 градусов, состоящий из плеча (19) с осью (20), с закрепленными на ней отвесами (21). Корпус (16) датчика (4) заполнен демпфирующей жидкостью (22), смягчающей колебания маятника (18) и защищающей от климатических температурных изменений. Простота конструкции этих датчиков (4) позволяет не только заменять друг друга, но и производить ремонт в полевых условиях без простоя стрелового самоходного крана без поворотной части. Это существенно упрощает процесс ремонта стрелового самоходного крана без поворотной части и, следовательно, сокращает время простоя неисправного указанного крана. Затем контроллер (1) оцифровывает полученные аналоговые сигналы с датчиков (3, 8, 4) и выключателей (5), преобразует, посредством работающего в нем алгоритма работы и настройки системы управления стреловым самоходным краном без поворотной части, в цифровые управляющие сигналы для дискретного или пропорционального управления стреловым самоходным краном без поворотной части, электрические сигналы и направляет их в устройства (15) управления краном, устройство (6) световой сигнализации, направляет в дисплей-контроллер (2) через CAN линию, который формирует графические изображения стрелового самоходного крана без поворотной части (крана-трубоукладчика) и цифровой последовательный код. Кроме того, дисплей-контроллер (2) формирует электрические и цифровые сигналы и ведет лог системы. Полученные электрические сигналы используются для устройства (6) световой сигнализации, устройства (7) звуковой сигнализации, для дискретного или пропорционального управления краном. Например, во время работы стрелового самоходного крана без поворотной части (крана-трубоукладчика) дисплей-контроллер (2) формирует графические изображения стрелового самоходного крана без поворотной части (крана-трубоукладчика) и цифровой последовательный код.
- формирует электрические сигналы для устройства (6) световой сигнализации и устройства (7) звуковой сигнализации,
- формирует цифровые сигналы для дискретного или пропорционального управления указанным краном,
- ведет лог системы.
В качестве устройства (6) световой сигнализации, которое коммутирует с дисплеем-контроллером (2), могут использоваться, например, яркие цветные светодиоды или лампы, установленные в кабине оператора. В качестве устройства (7) звуковой сигнализации, которое коммутирует с дисплеем-контроллером (2), может использоваться, например, звуковая колонка установленная в кабине оператора. В результате все узлы стрелового самоходного крана без поворотной части находятся под контролем, что позволяет оператору указанного крана осуществлять полноценное управление стреловым самоходным краном без поворотной части (краном-трубоукладчиком). В случае выполнения работы стрелового самоходного крана без поворотной части (кран-трубоукладчик) в колонне с другими аналогичными кранами, например, когда несколько кранов поднимают один груз (длинную газовую трубу или другой негабаритный груз), контроллер (1) формирует электрические сигналы для устройства (6) световой сигнализации, выраженные в форме светового последовательного кода.
В качестве устройства (6) световой сигнализации, которое коммутирует с контроллером (1), может использоваться, например, проблесковый маячок оранжевого цвета, установленный на крыше или капоте указанного крана. Сигналы, выдаваемые устройством (6) световой сигнализации, учитываются оператором данного стрелового самоходного крана без поворотной части, так операторами других стреловых самоходных кранов без поворотной части, кранов-трубоукладчиков, если все указанные стреловые самоходные краны без поворотной части работают в колонне. Например, во время работы стрелового самоходного крана без поворотной части, в случае выхода из строя первого ДУМА, расположенного на стеле, система управления стрелового самоходного крана без поворотной части (крана-трубоукладчика) не может измерить угол наклона стрелы, перестает работать алгоритм работы и настройки системы управления. В результате, система управления не работает, что приводит к простою стрелового самоходного крана без поворотной части (крана-трубоукладчика). Ввиду того, что три ДУМА являются взаимозаменяемыми элементами, на место нерабочего первого ДУМА устанавливают второй ДУМА или третий ДУМА. В итоге, система управления может измерить угол наклона стрелы и обеспечивает работу алгоритма работы и настройки системы управления, и следовательно, обеспечивается работоспособность стрелового самоходного крана без поворотной части (крана-трубоукладчика).
Алгоритм работы и настройки системы управления стреловым самоходным краном без поворотной части (краном-трубоукладчиком) позволяет обеспечить функционирование системы управления.
На фиг. 2-4 показаны варианты реализации алгоритма работы и настройки, реализованного в соответствии с заявленным изобретением.
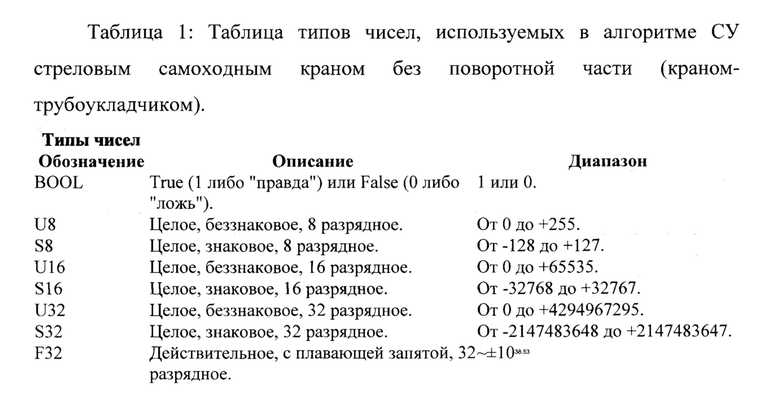
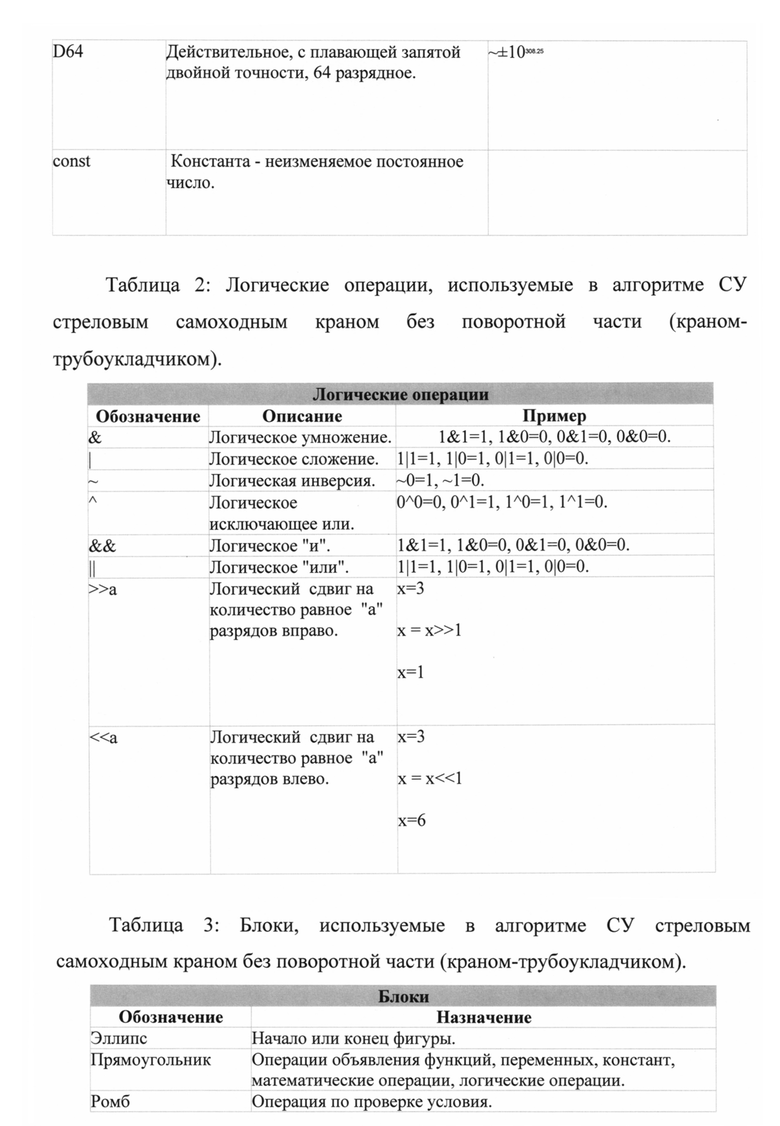
Алгоритм управления стрелового самоходного крана без поворотной части (крана-трубоукладчика), заложенный в дисплей-контроллер (2), представлен в виде упрощенной фигуры, а также фигур вспомогательных функций F0…F14. В таблице 1 указаны условные обозначения типов чисел, которые используются в фигуре алгоритма вычисления и их диапазон. В таблице 2 указаны условные обозначения логических операций, действий, которые используются в фигуре алгоритма вычисления. В таблице 3 указаны условные обозначения и назначения блоков, которые используются в фигуре алгоритма управления. При включении СУ стрелового самоходного крана без поворотной части (крана-трубоукладчика) начинает работать алгоритм управления, представленный на фиг. 2-4. В нем вычисляются переменные для обеспечения правильного управления стреловым самоходным краном без поворотной части (краном-трубоукладчиком): груз, который поднят указанным краном, единицы измерения (тонны), груз, который разрешен для поднятия краном, расстояние от грузозахватного оборудования до ребра опрокидывания крана, единицы измерения (метры), максимальное расстояние от ребра опрокидывания крана, на которое можно поднять и переставить груз, единицы измерения (метры) и много других переменных. Для вычисления используют размеры стрелового самоходного крана без поворотной части (крана-трубоукладчика), которые выбираются в зависимости от конфигурации. Память дисплея-контроллера (2) позволяет занести параметры для 100 кранов.
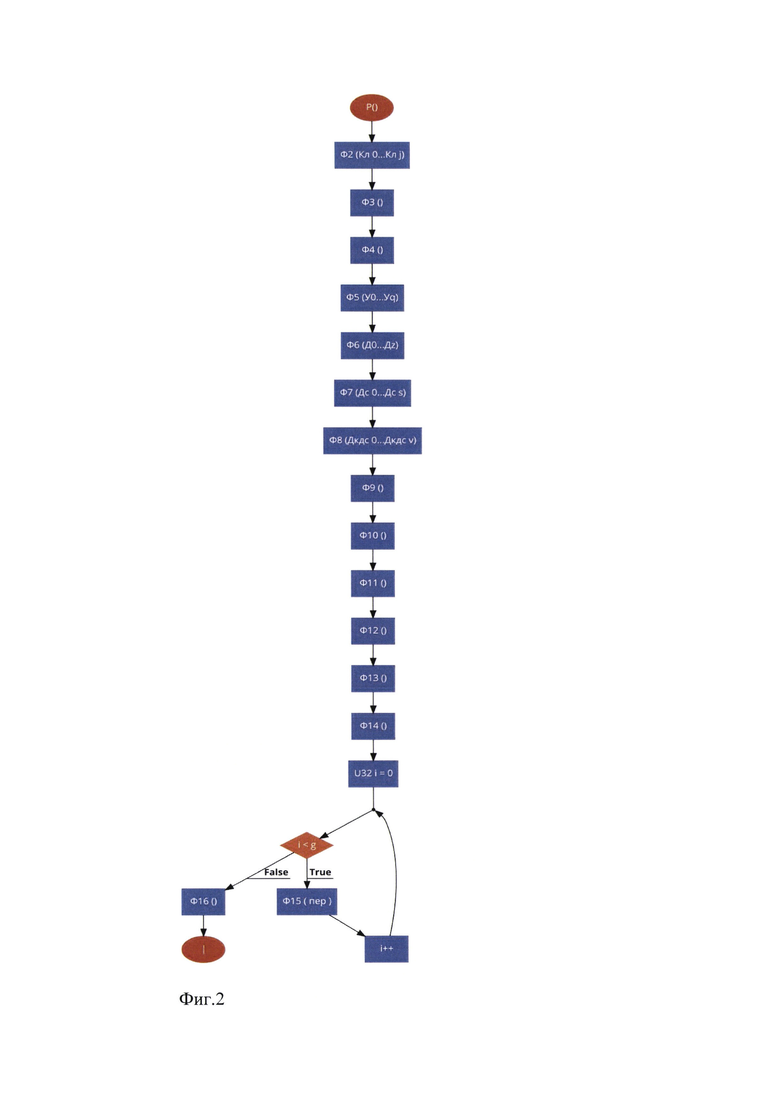
Порядок действий при реализации алгоритма, представленного на фиг. 2.
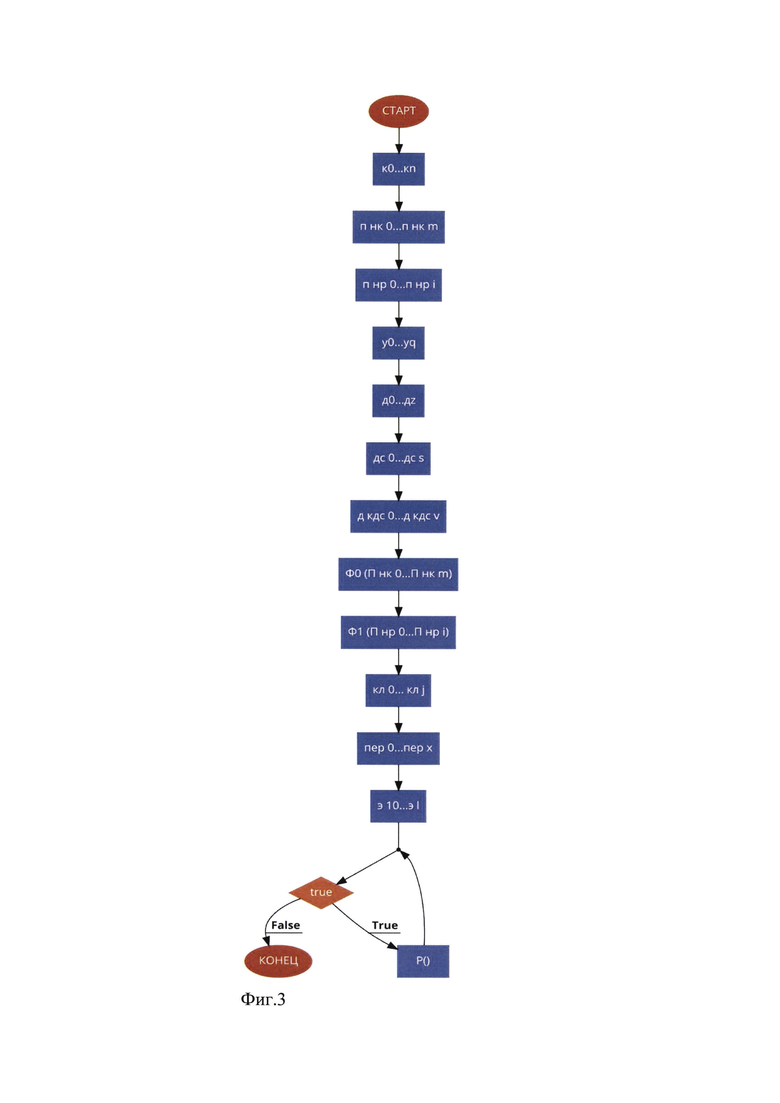
1) Объявляем, что будем использовать в вычислениях, от 0…n типа U32 констант k(k0…kn), разных типов чисел, представленных в таблице типов чисел, чтобы сохранить в RAM памяти дисплея-контроллера размеры, указанные на фиг. 8, координаты точек графиков функций грузовых характеристик. Константы нужны для вычисления переменных для правильного управления стреловым самоходным краном без поворотной части (краном-трубоукладчиком). Константы хранятся и обрабатываются в RAM дисплея-контроллера.
2) Объявляем, что будем использовать в вычислениях, от 0 до m типа U32 переменных-настроек стрелового самоходного крана без поворотной части, разных типов чисел, представленных в таблице типов чисел, нужные для коррекции констант, объявленных выше, "п нк". Эти переменные нужны для того чтобы корректировать разницу с размерами, указанными на фиг. 8, при серийном производстве кранов. Переменные хранятся и обрабатываются в RAM дисплея-контроллера.
3) Объявляем, что будем использовать в вычислениях, от 0 до i типа U32 переменных-настроек работы стрелового самоходного крана без поворотной части, разных типов чисел, представленных в таблице типов чисел, нужные для описания режимов работы крана из графиков грузовых характеристик, указанных на фиг. 9-13 "п нр". Переменные хранятся и обрабатываются в RAM дисплея-контроллера.
4) Объявляем, что будем использовать в вычислениях, от 0 до q типа U32 переменных "у", S16 типов чисел, представленных в таблице типов чисел. Эти переменные нужны для присвоения им значений углов от ДУМА (4), принятых по CAN линии от контроллера. ДУМА - датчик угла маятниковый аналоговый, устанавливается на оборудование стрелового самоходного крана без поворотной части. В частности, как показано на фиг. 8, первый ДУМА (4-1) устанавливается на стрелу, второй ДУМА (4-2) устанавливается в правой или левой части крана (крана-трубоукладчика), а третий ДУМА (4-3) устанавливается в передней или задней частях крана (крана-трубоукладчика). Переменные хранятся и обрабатываются в RAM дисплея-контроллера.
5) Объявляем, что будем использовать в вычислениях, от 0 до z типа U32 переменных "д", S16 типов чисел, представленных в таблице типов чисел. Эти переменные нужны, для присвоения им значений давлений от аналоговых датчиков (3) давления, принятых по CAN линии от контроллера. Один аналоговый датчик (3) давления устанавливается в поршневую полость гидроцилиндра подъема стрелы на стрелу, а второй аналоговый датчик (3) давления устанавливается в штоковую полость гидроцилиндра подъема стрелы стрелового самоходного крана без поворотной части (крана-трубоукладчика). Переменные хранятся и обрабатываются в RAM дисплея-контроллера.
6) Объявляем, что будем использовать в вычислениях, от 0 до s типа U32 переменных "дс", BOOL типов чисел, представленных в таблице типов чисел. Эти переменные нужны для присвоения им значений дискретных сигналов от контактных и бесконтактных концевых выключателей, принятых по CAN линии от контроллера. В частности, один концевой выключатель (5) устанавливается на стрелу, другой концевой выключатель (5) устанавливается на крепление противовеса крана (крана-трубоукладчика). Переменные хранятся и обрабатываются в RAM дисплея-контроллера.
7) Объявляем, что будем использовать в вычислениях, от 0 до v типа U32 переменных "д кдс", S16 типов чисел, представленных в таблице типов чисел. Эти переменные нужны, для присвоения им значений давлений от аналоговых датчиков (3) давления, принятых по CAN линии от контроллера (1). Эти датчики (3) устанавливаются в разные части гидросистемы стрелового самоходного крана без поворотной части и нужны для контроля, диагностики гидросистемы крана. Переменные хранятся и обрабатываются в RAM дисплея-контроллера.
8) Выполняем функцию Ф0. Функция имеет от 0 до m типа U32 входных параметров "П нк", разных типов чисел, представленных в таблице типов чисел. Эти входные параметры хранятся во FRAM дисплея-контроллера (2). Функция присваивает значения переменным "п нк" значения переменных "П нк".
9) Выполняем функцию Ф1. Функция имеет от 0 до i типа U32 входных параметров "П нр", разных типов чисел, представленных в таблице типов чисел. Эти входные параметры хранятся во FRAM дисплея-контроллера (2). Функция присваивает значения переменным "п нр" значения переменных "П нр".
10) Объявляем, что будем использовать в вычислениях, от 0 до j типа U32 переменных-ключей "кл", разных типов чисел, представленных в таблице типов чисел, нужные как признаки совершения математических и логических операций над переменными "п нк" и "п нр", объявленных выше. Переменные хранятся и обрабатываются в RAM дисплея-контроллера (2).
11) Объявляем, что будем использовать в вычислениях, от 0 до х типа U32 переменных "пер", разных типов чисел, представленных в таблице типов чисел, нужные для сохранения промежуточных результатов вычисления, математических, логических операций, организации счетчиков. Переменные хранятся и обрабатываются в RAM дисплея-контроллера (2).
12) Объявляем, что будем использовать в вычислениях, от 10 до 1 типа U32 переменных "э", разных типов чисел, представленных в таблице типов чисел, нужные для настройки системы управления и сохранения "экспериментальных" данных. Переменные хранятся во FRAM, обрабатываются в RAM дисплея-контроллера (2).
13) Выполняем функцию Р без входных параметров в бесконечном цикле с периодичностью 50 миллисекунд.
Порядок действий при реализации алгоритма, представленного на фиг. 3.
Выполняем функцию Ф2. Функция имеет от 0 до j входных параметров "Кл". Функция присваивает значения переменным "кл" значения переменных "Кл".
1) Выполняем функцию Ф3, без входных параметров. Функция выполняет математические и логические операции с переменными "пер".
2) Выполняем функцию Ф4, без входных параметров. Функция проверяет переменные "п нк" на превышение максимального или минимального значения. В случае превышения переменная приравнивается начальному значению.
3) Выполняем функцию Ф5. Функция имеет от 0 до q входных параметров "У" типа S16. Эти входные параметры - значения углов от ДУМА (4), принятых дисплеем-контроллером (2) по CAN линии от контроллера (1). Функция присваивает значения переменным "у" значения переменных "У".
4) Выполняем функцию Ф6. Функция имеет от 0 до v входных параметров "Д" типа S16. Эти входные параметры - значения давлений от аналоговых датчиков (3) давления принятых дисплеем-контроллером (2) по CAN линии от контроллера (1). Функция присваивает значения переменным "у" значения переменных "У".
5) Выполняем функцию Ф7. Функция имеет от 0 до s входных параметров "Дс" типа BOOL. Эти входные параметры - значения дискретных сигналов от контактных и бесконтактных концевых выключателей (5) принятых дисплеем-контроллером (2) по CAN линии от контроллера (1). Функция присваивает значения переменным "дс" значения переменных "Дс".
6) Выполняем функцию Ф8. Функция имеет от 0 до z входных параметров "Д кдс" типа S16. Эти входные параметры - значения давлений от аналоговых датчиков (3) давления принятых дисплеем-контроллером (2) по CAN линии от контроллера (1). Функция присваивает значения переменным "д кдс" значения переменных "Д кдс".
7) Выполняем функцию Ф9, без входных параметров. Функция анализирует переменные "у", "д", "д с", "д кдс" и на основе этого анализа приравнивает части переменных "пер" условные коды "ошибок", "ограничений", "отказов оборудования", "выходные сигналы".
8) Выполняем функцию Ф10, без входных параметров. Функция анализирует переменные "п нк", "п нр", "д с", "пер" и на основе этого анализа выбираются параметры того или иного крана и его грузовые характеристики.
9) Выполняем функцию Ф11, без входных параметров. В функции используются все выше объявленные константы и переменные вычисляются переменные для обеспечения правильного управления крановой установкой стрелового самоходного крана без поворотной части (крана-трубоукладчика): груз, который поднят краном, единицы измерения-тонны, груз, который разрешен для поднятия краном, расстояние от грузозахватного оборудования до ребра опрокидывания крана, единицы измерения-метры, максимальное расстояние от ребра опрокидывания крана, на которое можно поднять и переставить груз, единицы измерения-метры и много других переменных. Переменные сохраняем в части переменных "пер".
10) Выполняем функцию Ф12, без входных параметров. Функция анализирует часть переменных "пер" груз, который поднят краном, единицы измерения-тонны, груз, который разрешен для поднятия краном, расстояние от грузозахватного оборудования до ребра опрокидывания крана, единицы измерения-метры, максимальное расстояние от ребра опрокидывания крана, на которое можно поднять и переставить груз, единицы измерения-метры и много других переменных и на основе этого анализа формирует - присваивает части переменных "пер" условные коды "ошибок", "ограничений", "отказов оборудования", "выходные сигналы", "выходные значения".
11) Выполняем функцию Ф13, без входных параметров. Функция анализирует часть переменных "пер" условные коды "ошибок", "ограничений", "отказов оборудования" и на основе этого анализа сортируем по приоритету - главенству.
12) Выполняем функцию Ф14, без входных параметров. Функция анализирует переменные "пер" в части условных кодов "ошибок", "ограничений", "отказов оборудования" и приравнивает части переменных "пер" окончательные "выходные сигналы" и "выходные значения".
13) Выполняем функцию Ф15 в цикле от 0 до х раз. Функция имеет входной параметров "пар" типа U32. Параметр "пар" принимает значения от 0 до х. Результат работы функции - одна из переменных "пер", которая уже используется непосредственно в управлении крановой установкой. Функция анализирует переменные "пер" в части условных кодов "ошибок", "ограничений", "отказов оборудования" и приравнивает части переменных "пер" окончательные "выходные сигналы" и "выходные значения".
14) Выполняем функцию Ф16, без входных параметров. Функция записывает часть переменные "пер" в лог-файл (Application Log (Vault Memory)).
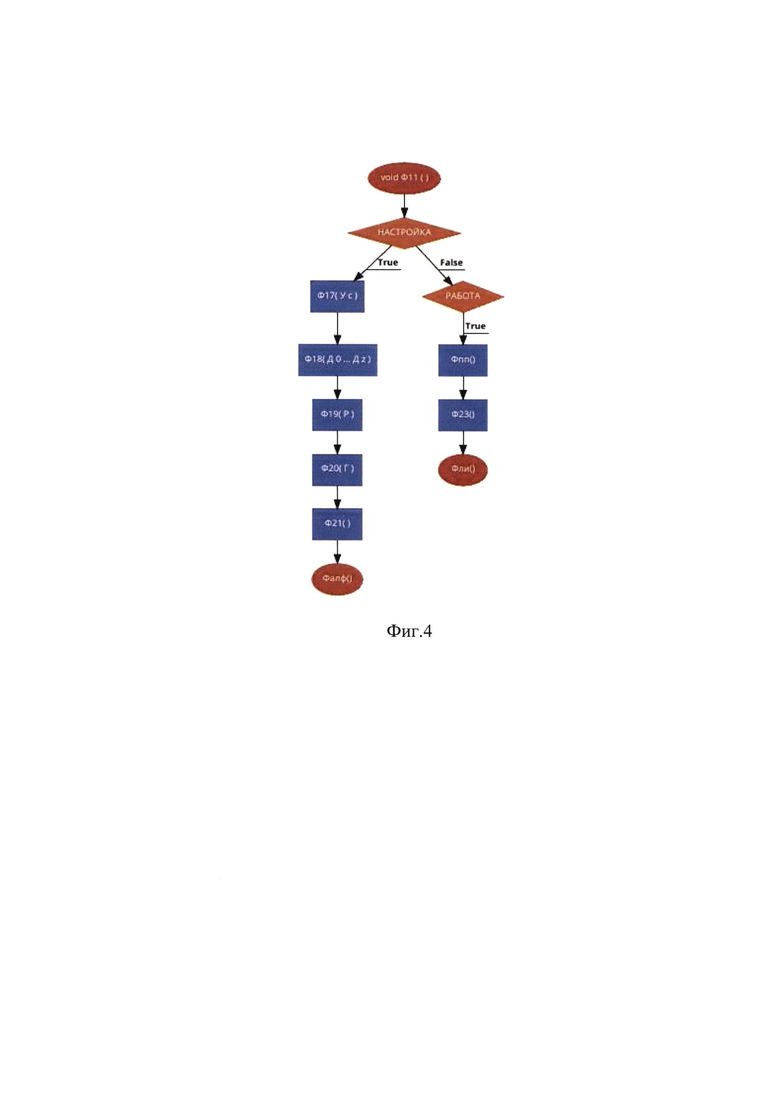
Порядок действий, реализуемый в алгоритме, представленном на фиг. 4.
Если происходит настройка системы. Выполняем эксперимент от 10 до 1 раз. Эксперимент заключается в поднятии поверенных грузов отличающихся не меньше 50% от грузов и не больше 105% в графиках грузовых характеристик крана, как указано на фиг. 9-13, на расстояние не меньше и не больше 1% как в этих графиках - от начала графиков и до конца. Очевидно, что груз, поднятый стреловым самоходным краном без поворотной части, можно рассчитать, зная показания датчиков нагруженного крана и показания датчиков без нагрузки. Поэтому, эксперимент также заключается и в записи показаний датчиков крана без нагрузки (без груза на грузозахватном механизме) и с нагрузкой в точках графика грузовых характеристик крана, как указано на фиг. 9-13, на расстояние не меньше и не больше 1% как в этих графиках. Замеры делаются так чтобы описать график.
1) Настройка. Выполняем функцию Ф17. Функция имеет входной параметр "Ус" типа S16. Эти входной параметр - значение угла от первого ДУМА (4-1), установленного на стреле крана, принятых дисплеем-контроллером (2) по CAN линии от контроллера (1). Функция присваивает части переменных "э" значения переменной "Ус". Эта часть после настройки будет иметь два ряда от 10 до 1 экспериментальных значений угла от первого ДУМА (4-1), установленного на стреле крана под нагрузкой и без нагрузки - "Уэн" 10 … 1 "Уэн", "Уэбн" 10 … 1 "Уэбн".
2) Настройка. Выполняем функцию Ф18. Функция имеет от 0 до v входных параметров "Д" типа S16. Эти входные параметры - значения давлений от аналоговых датчиков (3) давления принятых дисплеем-контроллером (2) по CAN линии от контроллера (1). Функция присваивает значения части переменны "э" значения переменных "Д". Эта часть после настройки будет иметь две матрицы экспериментальных значений размером от 10 до 1 на от 0 до v значений давлений от аналоговых датчиков (3) давления крана под нагрузкой и без нагрузки -
3) Настройка. Выполняем функцию Ф19. Функция имеет входной параметр "Р" типа U16. Этот входной параметр - значения расстояние от грузозахватного оборудования до ребра опрокидывания крана, которое измеряется измерительной рулеткой или аналогичным приспособлением. Функция присваивает значения переменным "э" значения переменных "Р". Эта часть после настройки будет иметь два ряда от 10 до 1 экспериментальных значений расстояние от грузозахватного оборудования до ребра опрокидывания крана под нагрузкой и без нагрузки - "Рэн" 10 … 1 "Рэн", "Рэбн" 10 … 1 "Рэбн".
4) Настройка. Выполняем функцию Ф20. Функция имеет входной параметр "Г" типа U16. Этот входной параметр - значения груза на грузозахватном оборудовании. Функция присваивает значения переменным "э" значения переменных "Г". Эта часть после настройки будет иметь два ряда от 10 до 1 экспериментальных значений груза на грузозахватном оборудовании крана под нагрузкой и без нагрузки - "Гэн" 10 … 1 "Гэн", Тэбн" 10 … 1 Тэбн".
5) Настройка. На момент выполнения функции, известны все значения от 10 до 1 углов от первого ДУМА (4-1), установленного на стреле, известны все от 10 до 1 значения от 0 до z давлений от датчиков (3) давления, также известны все значения от 10 до 1 расстояние от грузозахватного оборудования до ребра опрокидывания крана и известны значения все значения от 10 до 1 груза на грузозахватном оборудовании. Так же известны размеры крана, указанные на фиг. 8., и графики грузовых характеристик крана, указанных на фиг. 9-13. На основе этих данных можно вычислить "расчетные" расстояние от грузозахватного оборудования до ребра опрокидывания крана: "Ррн" 10 … 1 "Ррн", "Ррбн" 10 … 1 "Ррбн" и давления:
соответствующие значениям значение угла от ДУМА (4-1), установленного на стреле крана, эксперимента под нагрузкой и без нагрузки, "Уэн" 10 … 1 "Уэн", "Уэбн" 10 … 1 "Уэбн". Выполняем функцию Ф21, без входных параметров. Функция рассчитывает "расчетные" расстояние от грузозахватного оборудования до ребра опрокидывания крана: "Ррн" 10 … 1 "Ррн", "Ррбн" 10 … 1 "Ррбн" и давления:
6) Настройка. Выполняем функцию Фалф - функцию аппроксимации линейной функцией. Функция "рассматривает" следующие зависимости, которые можно представить линейными функциями и могут быть записаны уравнением у = а * х + b:
1. "Уэн" 10 … 1 "Уэн" ("Рэн" 10 … 1 "Рэн") - экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана от экспериментальных значения расстояние от грузозахватного оборудования до ребра опрокидывания крана, кран нагружен,
2. "Уэбн" 10 … 1 "Уэбн" ("Рэбн" 10 … 1 "Рэбн") - экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по экспериментальным значениям расстояния от грузозахватного оборудования до ребра опрокидывания крана, кран без нагрузки,
3.  - экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по экспериментальным значениям давлений аналоговых датчиков (3) давления крана, кран нагружен,
- экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по экспериментальным значениям давлений аналоговых датчиков (3) давления крана, кран нагружен,
4.  - экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по экспериментальным значениям давлений аналоговых датчиков (3) давления крана, кран без нагрузки,
- экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по экспериментальным значениям давлений аналоговых датчиков (3) давления крана, кран без нагрузки,
5. "Уэн" 10 … 1 "Уэн" ("Ррн" 10 … 1 "Ррн") - экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученного по расчетным значениям расстояния от грузозахватного оборудования до ребра опрокидывания крана, кран нагружен,
6. "Уэбн" 10 … 1 "Уэбн" ("Ррбн" 10 … 1 "Ррбн") - экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по расчетным значениям расстояния от грузозахватного оборудования до ребра опрокидывания крана, кран без нагрузки,
7.  - экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по расчетным значениям давлений аналоговых датчиков (3) давления крана, кран нагружен,
- экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по расчетным значениям давлений аналоговых датчиков (3) давления крана, кран нагружен,
8.  - экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по расчетным значениям давлений аналоговых датчиков (3) давления крана, кран без нагрузки.
- экспериментальные значения угла от первого ДУМА (4-1), установленного на стреле крана, полученные по расчетным значениям давлений аналоговых датчиков (3) давления крана, кран без нагрузки.
В частности, аппроксимация необходима для поиска коэффициентов а0 и b0 для представленных зависимостями (2, 5, 6) и коэффициентов a1 и b1 для зависимостей (4, 7, 8), где критерий поиска определяется используемым математическим методом. С этой целью чаще всего используется метод наименьших квадратов (МНК). Эти коэффициенты хранятся в части переменных «э». Таких экспериментов может быть от 1 до количества грузовых характеристик.
Выполняем функцию Фпп (), без входных параметров. Функция подбора параметров. Она подбирает - рассчитывает с учетом коэффициентов а0 и b0 для графиков грузовых характеристик крана, как указано на фиг. 9-13, углы стрелы Уп 0 … w Уп, чтобы они соответствовали расстояниям на графиках, где w - количество точек которое решили использовать. И приравниваем части переменных "пер".
7) Выполняем функцию Ф23 (), без входных параметров. Функция расчета давлений крана нагруженного:
и без нагрузки:
Она рассчитывает с учетом коэффициентов a1 и b1 для графиков грузовых характеристик крана, как указано на фиг. 9-13, для углов стрелы Ур 0 … w Ур, чтобы они соответствовали расстояниям на графиках. И приравниваем части переменных "пер".
8) Выполняем функцию Фли (), без входных параметров. Это функция линейной интерполяции. На этом этапе имеем информацию со всех датчиков, данные из грузовых характеристик, расстояние и грузы ("Р" 0 … w "Р", "Г" 0 … w "Г"), подобранные углы "Уп" 0 … w "Уп" и рассчитанные давления нагруженного и крана без нагрузки, которые соответствуют данным подобранным углам:
и без нагрузки:
Из этих данных, опираясь на информацию от датчиков, происходит линейная интерполяция по углу стрелы и тем самым вычисляются следующие параметры крана: груз, который поднят краном, единицы измерения-тонны, груз, который разрешен для поднятия краном, расстояние от грузозахватного оборудования до ребра опрокидывания крана, единицы измерения-метры, максимальное расстояние от ребра опрокидывания крана, на которое можно поднять и переставить груз, единицы измерения-метры и много других переменных.
Таким образом, заявленная система управления стрелового самоходного крана без поворотной части (крана-трубоукладчика), выполненная в соответствии с заявленным изобретением, обеспечивает надежную работу в различных условиях, а также имеет более низкую конструктивную сложность по сравнению с аналогичными системами.
Источники информации
1. Патент РФ №2314248, МПК В66С 23/88, приоритет от 12.05.2006 г.;
2. Патент РФ №122997, МПК В66С 23/88, приоритет от 19.01.2012 г.;
3. Патент РФ №2448036, МПК В66С 23/88, приоритет от 04.08.2010 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ МАШИНЫ С ГРАФИЧЕСКИМ ДИСПЛЕЕМ | 2010 |
|
RU2448036C1 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2487078C2 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СИСТЕМА КОНТРОЛЯ ГРУЗОВОЙ УСТОЙЧИВОСТИ МОБИЛЬНЫХ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2267458C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2268232C2 |
Предложена система управления стрелового самоходного крана без поворотной части. Система содержит соединенные друг с другом контроллер (1) и дисплей-контроллер (2), к выходам которых подключены устройство (6) световой сигнализации, устройство звуковой сигнализации (7), устройства управления краном (15). К входам контроллера (1) подключены аналоговые датчики рабочего оборудования крана (3, 4, 8), например датчики давления, датчики усилия, датчики угла и цифровые датчики (9, 10, 11), посредством CAN-линии, элементы управления (12, 13), концевые выключатели (5). При этом контроллер (1) и дисплей-контроллер (2) выполнены с возможностью запуска алгоритма способа работы и настройки системы управления, ведения лога системы, формирования электрических сигналов для дискретного или пропорционального управления краном. При этом дисплей-контроллер (2) дополнительно выполнен с возможностью коммутации с аналоговыми датчиками (3, 4, 8) рабочего оборудования крана и цифровыми датчиками (9, 10, 11) посредством CAN-линии. При этом каждый аналоговый датчик угла содержит герметичный заполненный демпфирующей жидкостью корпус, внутри которого установлен чувствительный элемент, на котором размещен маятник, выполненный с возможностью отклонения на угол 110 градусов, состоящий из плеча с осью, на которой закреплены отвесы. Достигается повышение надежности. 13 ил., 2 табл.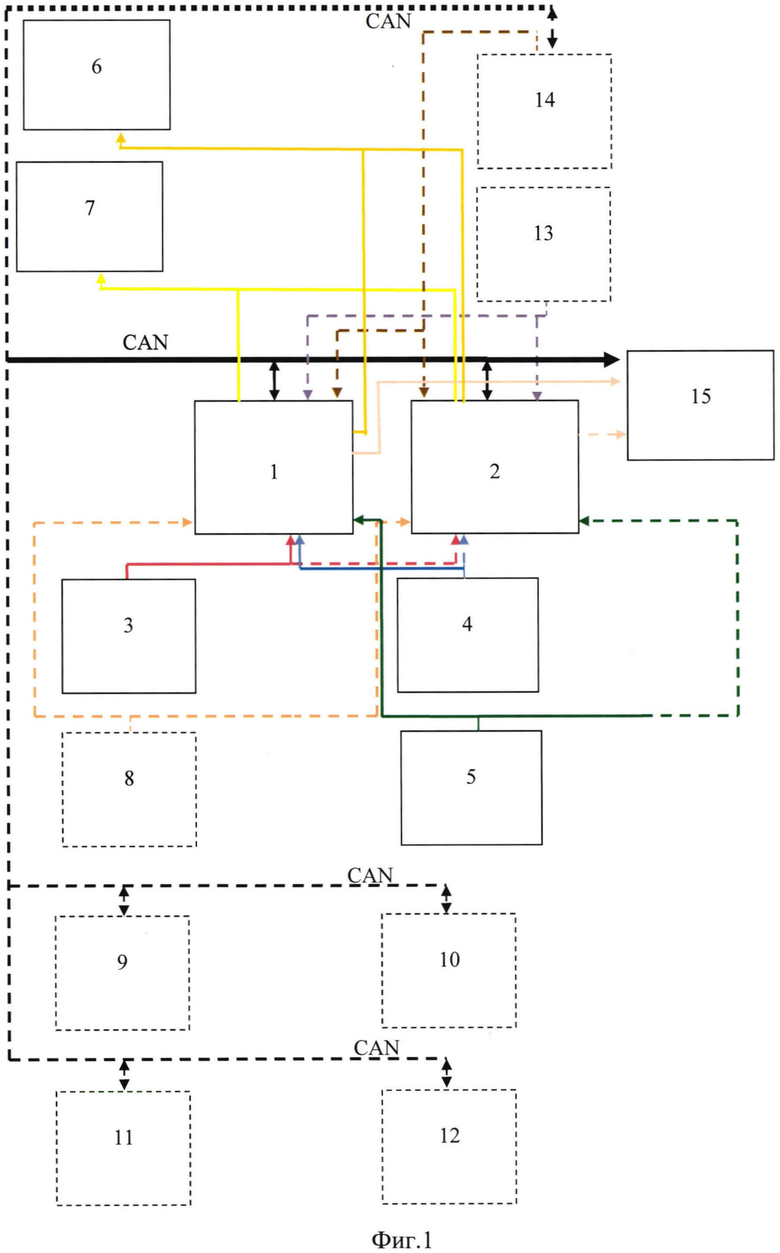
Система управления стрелового самоходного крана без поворотной части, характеризующаяся тем, что содержит соединенные друг с другом контроллер и дисплей-контроллер, к выходам которых подключены устройство световой сигнализации, устройство звуковой сигнализации, устройства управления краном, к входам контроллера подключены аналоговые датчики рабочего оборудования крана, например датчики давления, датчики усилия, датчики угла и цифровые датчики, посредством CAN-линии, элементы управления, концевые выключатели, при этом контроллер и дисплей-контроллер выполнены с возможностью запуска алгоритма способа работы и настройки системы управления, ведения лога системы, формирования электрических сигналов для дискретного или пропорционального управления краном, при этом дисплей-контроллер дополнительно выполнен с возможностью коммутации с аналоговыми датчиками рабочего оборудования крана и цифровыми датчиками посредством CAN-линии, при этом каждый аналоговый датчик угла содержит герметичный заполненный демпфирующей жидкостью корпус, внутри которого установлен чувствительный элемент, на котором размещен маятник, выполненный с возможностью отклонения на угол 110 градусов, состоящий из плеча с осью, на которой закреплены отвесы.
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2280609C2 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| DE 10042699 A1, 04.04.2002. | |||

