Изобретение относится к подъемно-транспортному машиностроению и может быть использовано для повышения грузоподъемности и устойчивости, уменьшения заднего габарита, снижения стоимости преимущественно мобильных железнодорожных и автомобильных кранов.
Известен железнодорожный кран, содержащий ходовую платформу с установленным на ней поворотным грузоподъемным устройством (см. М.П.Александров.- М.: Высшая школа, 1973 г, стр.22).
Общеизвестно, что для повышения грузовой устойчивости подъемных машин необходимо увеличивать их собственную массу и вводить контргруз, то есть противовес.
Но сила, действующая от веса изделия на колесную пару из условий прочности пути и безопасности движения, не должна быть больше допустимой. Например, для железнодорожных путевых машин, вагонов и кранов нагрузка на рельсы от одной оси должна составлять максимум 250 кН. Масса этих изделий может составлять 120…180 т и более. Поэтому мобильные железнодорожные краны большой грузоподъемности имеют 6…8-осную ходовую платформу. Это приводит к увеличению габаритов, удорожанию, усложнению машин. На железнодорожном транспорте, кроме того, можно применять только стандартизованные, прошедшие сложные и многолетние испытания тележки экипажной части машин. Эти ответственные узлы ходовой рамы имеют по две или по три колесных пары. Поэтому кран грузоподъемностью Q=80 т и имеющий собственную массу 120 т установлен на две 3-осные стандартные приводные тележки. Изделия более мощные, например, способные поднять груз Q=150 т, весящие 180 т, опираются уже на 8 осей четырех стандартных 2-осных тележек.
Для увеличения устойчивости стреловых грузоподъемных устройств на их поворотной части устанавливают противовес. Для повышения его эффективности он должен быть размещен на значительном расстоянии от оси вращения, что существенно увеличивает и стоимость узла, и задний габарит крана. Кроме того, противовес, как стационарный и особенно выдвижной, приводит к большому смещению центра тяжести крана, следствием которого является ухудшение устойчивости изделия в без опорном (не установленном на аутригеры) режиме работы. Поэтому при не выдвинутых выносных опорах изделия имеют очень низкую грузоподъемность или теряют устойчивость при вращении и на них запрещено поднимать грузы без установки на выносные опоры.
Известен мобильный кран, содержащий ходовую раму с расположенным на ней поворотным стреловым грузоподъемным устройством и тягово-сцепным аппаратом с подсоединенным к нему буксируемым прицепом, который при подъеме грузов прикрепляют к ходовой раме с помощью механизма фиксации.
При этом колеса прицепа становятся подняты выше уровня колеи. После этого поднимают груз. Для повышения эффективности обычно применяют два одинаковых прицепа, расположенные, как это бывает чаще всего, с разных сторон ходовой платформы крана. Хотя возможна компоновка с размещением нескольких прицепов-противовесов с одной ее стороны или с разной массой.
Принимаем способ подъема грузов по этому решению за прототип. Его сущность рассмотрена в заявке на российское изобретение №2010124199.
В этом техническом решении оба прицепа с помощью привода механизма фиксации подняты выше уровня колеи и вся их масса повышает грузоподъемность изделия на одну и ту же величину при любом угле поворота крана. То есть получается классическая круговая характеристика значений поднимаемого груза в зависимости от угла поворота. Грузоподъемность в этом случае всегда одинакова при угле поворота в диапазоне от 0° до 360°. Привод фиксации может быть конструктивно выполнен, например, гидроцилиндром или гидромотором. Рассмотрим характеристику изменения грузоподъемности в зависимости от вылета для конкретного изделия, например, железнодорожного крана КЖ-1572, способного поднять груз весом 150 т. В соответствии с ней, кран поднимет на вылете, например, 9 м, которое примерно равно расстоянию от оси вращения до конца автосцепки, 115 т груза при угле поворота стрелы 0° (то есть стрела расположена вдоль пути, вдоль продольной оси крана). И при установке поворотной части крана поперек пути, то есть под углом 90° к ходовой платформе, грузоподъемность (как и при любом другом угле) будет составлять те же 115 т. Расчеты показывают, что при использовании двух прицепных противовесов общей массой 90 т обеспечивается значительное увеличение удерживающего момента, которое позволяет увеличить грузоподъемность без потери устойчивости на 86 тс, то есть вес поднимаемого груза может быть увеличен до 115+86=201 тс.
Но при работе часто требуется поднять груз, расположенный перед автосцепкой, и перенести его с поворотом на 180°, то есть переместить за вторую, за противоположную автосцепку крана, на другую сторону грузоподъемной машины. Или приподнять вагон для подката резервных тележек, необходимых для замены неисправных вследствие аварии. В этом случае из-за расположения прицепов за ходовой платформой их длина увеличивает расстояние от оси вращения крапа до груза на длину прицепа, которую примем, например, равную 2 м. На большем на 2 м вылете, то есть на R=9+2=11 м вылете, грузоподъемность КЖ-1572 будет снижена до 90 т, то есть упадет на 25 т. При использовании прицепов при опорном контуре квадратной формы грузоподъемность при работе вдоль пути также упадет на 25 т и составит вместо 201 т меньшую величину - 176 т. В то же время при установке стрелы под углом 90° кран по-прежнему способен поднимать груз весом 201 тс. Снижение грузоподъемности крана при работе вдоль пути из-за увеличения вылета на длину прицепа является недостатком использования технического решения по применению буксируемых краном тележек - противовесов.
Для исключения этого недостатка необходимо выполнить следующее: вначале включают аутригеры и поднимают кран выше уровня колеи, а затем включают привод механизмов фиксации прицепов и регулируют величину усилия их подъема путем уменьшения при приближении стрелы при ее повороте от перпендикулярного положения к продольной оси крана и механизму фиксации, расположенному со стороны стрелы, и увеличению усилия этого же привода фиксации при удалении стрелы от продольной оси при повороте крана из продольного положения в перпендикулярное к продольной оси грузоподъемной машины, а усилие подъема привода фиксации, расположенного с противоположной стороны стрелы в этом диапазоне угла поворота, сохраняется постоянным и максимальным.
Конструкция мобильного стрелового грузоподъемного устройства показана на Фиг.1 и Фиг.2.
На них изображен мобильный железнодорожный кран, содержащий поворотную раму со стрелой поз.1, ходовую раму поз.2, выносные опоры (то есть аутригеры) поз.3, устройство фиксации поз.4 взаимного транспортного положения ходовой рамы с прицепом поз.5 в рабочем режиме, содержащее связь, например, гибкого типа, а именно - троса поз.4.2, закрепленного на раме прицепа одним концом и другим в приводе фиксации, например гидроцилиндре поз.4.1, установленном на ходовой раме 2 мобильного крана и буксируемого в транспортном режиме с помощью тягового аппарата поз.6 прицепа поз.5. Левый и правый прицепы и гидроцилиндры обозначим соответственно 5**, 4.1** и 5*, 4.1*.
Поворотная часть крана опирается на ходовую раму через имеющую возможность свободно вращаться вокруг вертикальной оси поворотное устройство 9. Выносные опоры в транспортном режиме повернуты и прижаты к бортам крана, к ходовой раме 2. Прицеп и ходовая рама соединены между собой с помощью тягово-сцепного устройства поз.6, например, шарнирного типа.
Работает мобильный кран следующим образом. К месту подъема грузов он приезжает, буксируя за собой прицеп. В этом режиме натяжные тросы поз.4.2 ослаблены, шток гидроцилиндра поз.4.1 (к которому прикреплен один конец троса) свободно перемещается («плавает») и не мешает в любой плоскости легко поворачиваться в шарнире поз.6 и прицепу, и крану. Именно это и требуется от механизма фиксации в транспортном режиме - обеспечить свободную работу шарнира поз.6 при буксировке прицепа 5. Выносные опоры - аутригеры подняты, прижаты к раме и не выступают за габарит подвижного состава.
Подъехав к месту работ, кран останавливается. Аутригеры поворачивают и устанавливают под прямым углом к бортам грузоподъемной машины в соответствии с Фиг.2. Затем включают гидроцилиндры поз.7 и поднимают кран выше уровня колеи, выше уровня рельсов.
После этого включают натяжение тросов приводами 4.1* и 4.2**. Величина усилия зависит от угла поворота крана относительно его продольной оси, а в железнодорожном варианте использования - и относительно оси пути. Приводы механизмов фиксации выполняют в данном техническом решении еще и функцию изменения усилия подъема прицепов от 0 до максимума, которое способно оторвать прицеп от колеи. Для понимания алгоритма изменения усилий рассмотрим три характерных варианта расположения стрелы: а) поперек пути, то есть под углом 90°; б) вдоль пути, с расположением поворотной части, а значит и стрелы со стороны привода 4.1*. Принимаем для этого варианта угол позиционирования, угол между стрелой и продольной осью крана равным 0°; в) вдоль пути, с расположением стрелы со стороны привода 4.1**, то есть под углом 180°.
Для подъема груза краном необходимо обеспечить создание удерживающего момента, который должен быть больше, чем опрокидывающий. При расположении стрелы под углом 90°, то есть симметрично относительно механизмов фиксации, удерживающий момент будет максимальным тогда, когда усилия их подъема равны весу прицепов. В этом случае на удержание действует полный вес двух прицепов. При равных массах и расположении их центра на одинаковом расстоянии от оси поворота при подъеме прицепов эти усилия по величине будут одинаковыми. Хотя в общем случае вес прицепов и их масса могут быть и разными. Величина удерживающего момента M1 пропорциональна произведению общей массы на R1, где R1 - расстояние от продольной оси крана до ребра опрокидывания, расположенного вдоль пути.
При расположении стрелы вдоль пути, например, под углом 0°, на создание удерживающего момента по предлагаемому техническому решению будет работать только вес прицепа, который поднимает гидроцилиндр 4.1**. Вес прицепа с противоположной стороны, расположенного под стрелой, наоборот, будет при включении на натяжение троса поз.4.1* функционировать на опрокидывание. Поэтому усилие подъема, развиваемое гидроцилиндром 4.1*, должно быть минимальным и равным 0. А удерживающий момент от прицепа 5**, наоборот, должен быть максимальным. Для его создания гидроцилиндр 4.1** должен приподнять свой прицеп выше уровня колеи. Удерживающий момент М2 будет определяться произведением веса прицепа 5** на расстояние от центра его тяжести до ребра опрокидывания, расположенного поперек пути, которое обозначим через R2. Вследствие значительной разницы размеров ширины и длины ходовой рамы большегрузных машин, М2, значительно, обычно в 3-5 раз больше чем M1. Благодаря этому факту легко обеспечить создание удерживающего момента и поднимаемого груза по предлагаемому техническому решению существенно большим при расположении стрелы вдоль пути, чем поперек.
При повороте стрелы против часовой стрелки в диапазоне от 0° до 90° усилие, развиваемое приводом 4.1** должно оставаться максимальным, а у привода 4.1* постепенно увеличиваться от 0 до наибольшего значения, которое способно привести к созданию вертикальной силы, равной весу прицепа 5* при угле 90°. Движители при перпендикулярном положении крана относительно продольной оси пути могут находится выше уровня головок рельсов или на грани их отрыва от колеи.
При повороте от 90° до 180° усилие от гидроцилиндра поз.4.1* должно оставаться максимальным, а привода 4.1** постепенно уменьшающимся до 0. При повороте в диапазоне 180°-270° действие поз.4.1** должно плавно усиливаться до максимального значения, способного приподнять прицеп. Привод 4.1* должен при угле поворота 90°-270° поддерживать максимальное усилие. После поворота на угол, больший 270°, усилие привода 4.1* должно постепенно ослабевать до нулевого значения при достижении 360°. В этом диапазоне от 270° до 360° и далее, от 0° до 90° поз.4.1** развивает наибольшее усилие.
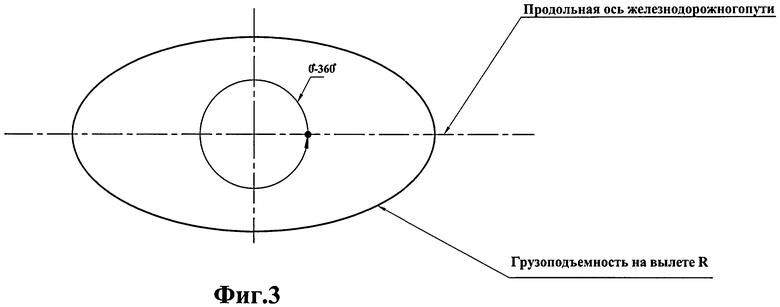
Такое изменение усилий приводов подъема - фиксации прицепов - противовесов позволяет создать грузовую характеристику, не кругового, а, например, овального типа с расположением его большой оси вдоль пути.
На Фиг.3 приводится грузовая характеристика крана. Из ее анализа следует, что грузоподъемное устройство при углах поворота, близких к нулевому и близких к 180°, способно поднимать существенно больший груз, чем при расположении крана поперек пути, под углами, близкими к 90° и 270°.
Способ подъема грузов мобильным краном с буксируемыми прицепами, расположенными с противоположных сторон ходовой платформы путем изменения по определенному закону, по определенному алгоритму усилий подъема механизмов фиксации этих прицепов, позволяет изменить грузовую характеристику при углах поворота 0°-360° с круговой, например, на овальную и обеспечить необходимое повышение грузоподъемности при продольном расположении стрелы для исключения негативного влияния на грузовую характеристику крана увеличения вылета на длину тележек-противовесов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЕМА ГРУЗОВ МОБИЛЬНЫМ КРАНОМ | 2012 |
|
RU2494955C1 |
| МОБИЛЬНЫЙ КРАН | 2010 |
|
RU2460684C2 |
| Способ подъема груза | 2019 |
|
RU2703097C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513887C1 |
| КРАН УКЛАДОЧНЫЙ | 2011 |
|
RU2450095C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ПАКЕТА РЕЛЬСОВЫХ ЗВЕНЬЕВ | 2010 |
|
RU2452808C2 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН, ПРЕИМУЩЕСТВЕННО ДЛЯ ВОССТАНОВИТЕЛЬНЫХ РАБОТ | 1998 |
|
RU2155155C1 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |

Изобретение относится к мобильным подъемным кранам и может быть использовано для повышения их грузоподъемности. При подъеме грузов используют мобильный кран, который содержит ходовую раму с расположенным на ней поворотным стреловым грузоподъемным устройством, тягово-сцепные аппараты, расположенные с разных сторон ходовой платформы, и прицепы. После подъема груза включают аутригеры и поднимают кран выше уровня колеи, включают привод механизмов фиксации прицепов и регулируют величину усилия их подъема путем уменьшения при приближении стрелы при ее повороте от перпендикулярного положения к продольной оси и механизму фиксации. Усилие подъема привода фиксации, расположенного с противоположной стороны стрелы в диапазоне угла поворота, сохраняют постоянным и максимальным. Достигаются увеличение эффективности работы крана с прицепными колесными противовесами и сохранение неизменным значения грузоподъемности при любом угле поворота крана, в том числе при работе вдоль пути, исключая тем самым влияние увеличения вылета, вызванного длиной прицепов. 3 ил.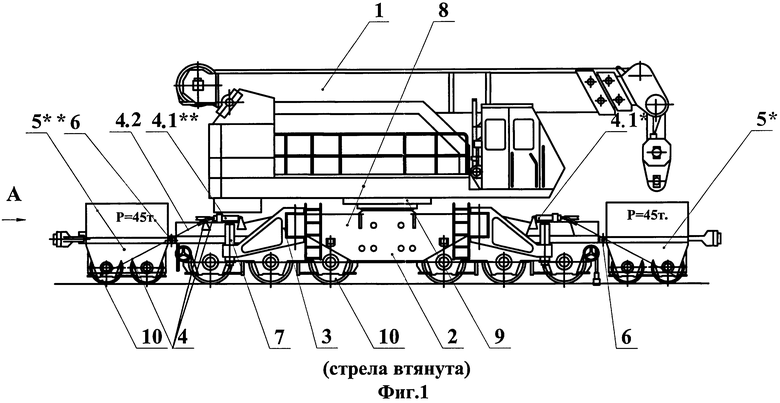
Способ подъема грузов мобильным краном, содержащим ходовую раму с расположенным на ней поворотным стреловым грузоподъемным устройством и тягово-сцепными аппаратами, с подсоединенными к ним буксируемыми прицепами, расположенными с противоположных сторон ходовой платформы, которые при подъеме грузов прикрепляют к ходовой раме, а после этого поднимают груз, отличающийся тем, что вначале включают аутригеры и поднимают кран выше уровня колеи, а затем включают привод механизмов фиксации прицепов и регулируют величину усилия их подъема путем уменьшения при приближении стрелы при ее повороте от перпендикулярного положения к продольной оси крана и механизму фиксации, расположенному со стороны стрелы и увеличению усилия этого же привода фиксации при удалении стрелы от продольной оси при повороте крана из продольного положения в перпендикулярное к продольной оси грузоподъемной машины, а усилие подъема привода фиксации, расположенного с противоположной стороны стрелы в этом диапазоне угла поворота, сохраняется постоянным и максимальным.
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН | 2000 |
|
RU2176615C2 |
| Подъемно-транспортное устройство | 1987 |
|
SU1477663A1 |
| US 5518128 A, 21.05.1996 | |||
| US 2986407 A, 30.05.1961 | |||
| CN 201325838 Y, 14.10.2009 | |||

