Изобретение относится к системам дистанционного автоматизированного управления (ДАУ) главными судовыми двигателями (ГД), работающими на винт регулируемого шага.
Известны системы ДАУ, исключающие статическую работу ГД в зоне критических оборотов и обеспечивающие известным способом автоматическое прохождение зоны (Овсянников М. К. и Петухов В. А. Судовые дизельные установки. Л. : Судостроение, 1986, с. 138-158) с помощью устройств, аналогичных описанному в авт. св. СССР N 498405, кл. F 02 D 35/00.
Этот способ прохождения зоны критических оборотов, применяемый практически на подавляющем большинстве существующих систем ДАУ, предусматривает резкое увеличение подачи топлива по достижении оборотов нижней границы зоны при фиксированном шаге винта, соответствующем нижней границе зоны.
Ускоренное прохождение зоны по этому способу достигается за счет максимально возможного увеличения крутящего момента двигателя, но при этом напряжения от крутильных колебаний могут превышать предельно допустимые более чем в два раза, что противоречит "Правилам Регистра СССР". Ограничение же подачи топлива снижает возмущающие силы, но увеличивает время прохождения зоны.
Известно также устройство для осуществления иного способа прохождения зоны, характеризующегося плавным изменением мощности и крутящего момента двигателя на границе зоны и ее проходом при изменении шага винта [1] .
При этом в процессе прохождения зоны текущее значение шага винта снижают по мере возрастания оборотов, поддерживая постоянную мощность двигателя, соответствующую средним оборотам и среднему шагу винта для зоны.
В этом случае задаваемая мощность двигателя существенно ниже максимально возможной по первому способу, поэтому максимальные напряжения от крутильных колебаний понижаются.
Однако во время прохождения зоны гребной винт имеет значительный момент сопротивления, определяемый средними оборотами зоны и средним шагом винта, вследствие чего время прохождения зоны оказывается большим, чем по первому способу. Вместе с тем известно, что напряжения от резонансных крутильных колебаний растут как с увеличением возмущающего крутящего момента, так и, до известного предела, с увеличением времени работы в зоне резонанса. Влияние последнего фактора приводит к тому, что в итоге уровень напряжений от крутильных колебаний в зоне резонанса может превысить предельно допустимые значения.
Целью изобретения является сокращение времени прохождения зоны критических оборотов и уменьшение напряжений от крутильных колебаний в деталях двигателя и валопровода, благодаря чему повышается эксплуатационная надежность всего винтомоторного комплекса.
Поставленная цель достигается тем, что по способу прохождения зоны критических оборотов судового двигателя внутреннего сгорания с винтом регулируемого шага, заключающемуся в изменении шага винта в зависимости от его оборотов, на первом этапе при достижении винтом числа оборотов нижней границы зоны критических оборотов уменьшают шаг винта до величины, при которой упор винта равен нулю, на втором этапе при увеличении числа оборотов винта в пределах зоны критических оборотов уменьшают шаг винта до величины, обеспечивающей постоянство произведения шага винта на текущую величину числа оборотов в пределах зоны критических оборотов, а на третьем этапе при достижении винтом числа оборотов, соответствующего верхнему значению зоны критических оборотов, величину шага винта увеличивают в соответствии с диаграммой зависимости шага винта от числа оборотов.
В итоге минимизируется сопротивление винта во всем диапазоне критических оборотов, благодаря чему сокращается время прохождения зоны критических оборотов и уменьшаются напряжения от крутильных колебаний.
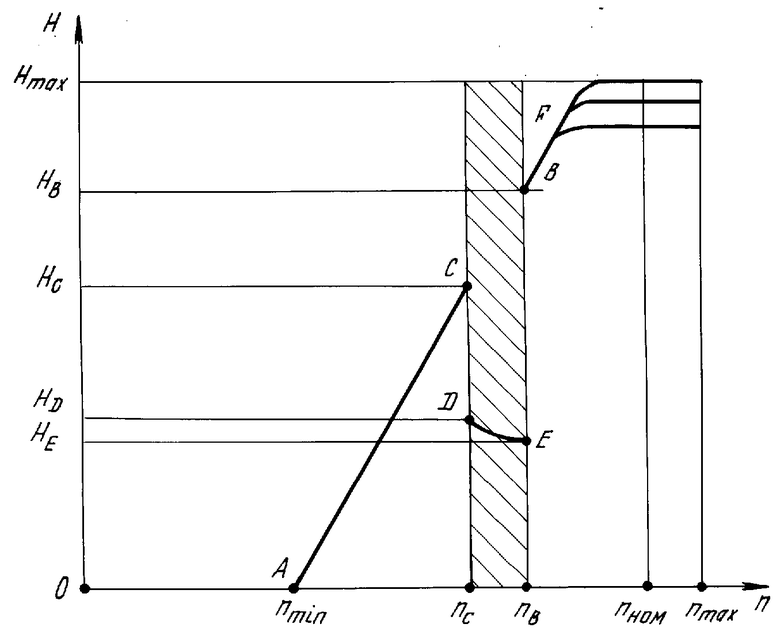
На чертеже показана диаграмма зависимости шага Н винта от числа его оборотов n (комбинаторная диаграмма) с нанесенными идеализированными линиями регулировок. На участке OA шаг винта равен нулю. В точке A - режим холостого хода с нулевым упором. По мере увеличения оборотов шаг винта изменяют по линии AC. . . BF и при дальнейшем увеличении оборотов - по одной из нескольких кривых, которые выбираются в зависимости от загрузки судна и условий плавания.
Зона критических оборотов (заштрихована) ограничена нижними nС и верхними nВ оборотами. Соответствующие точки на диаграмме: C и B. Шаг винта по комбинаторной диаграмме соответственно для нижней границы зоны HC, для верхней HB.
Изобретение осуществляется следующим образом. Зону критических оборотов проходят согласно идеализированной линии CDEB.
На первом этапе CD по достижении числа оборотов nC нижней границы зоны критических оборотов уменьшают шаг винта до значения HD, соответствующего флюгерному положению лопастей винта, при котором упор винта равен нулю, а момент сопротивления винта для текущей скорости судна минимален. На втором этапе по мере роста числа оборотов винта в пределах зоны критических оборотов от nC до nB шаг винта уменьшают от значения HD до значения HE в обратно пропорциональной зависимости от числа оборотов n, т. е. выдерживая соотношение H ˙ n = const.
Так как за это время скорость судна практически не изменится, это условие соответствует флюгерному или близкому к нему положению лопастей, тем самым на этом этапе обеспечивается минимизация сопротивления винта.
После того, как число оборотов винта достигнет значения nB, на третьем этапе EB, шаг винта увеличивают от HE до HB, соответствующего числу оборотов nB по комбинационной диаграмме зависимости шага винта от числа оборотов.
Предлагаемый способ за счет минимального момента сопротивления винта во всем диапазоне зоны критических оборотов позволяет сократить время прохождения зоны до минимума, вследствие чего амплитуда резонансных крутильных колебаний не успевает возрасти до опасных величин, что повышает надежность главного двигателя и безопасность плавания, особенно в ледовых условиях плавания, когда главный двигатель длительно работает на переменных режимах близ зоны критических оборотов и вынужден многократно проходить зону в обоих направлениях.
Использование: управление работой винторемонтного комплекса преимущественно крупнотоннажных судов. Сущность изобретения: зону критических оборотов проходят в три этапа, на первом при достижении винтом числа оборотов нижней границы зоны уменьшают шаг винта до величины, при которой упор винта равен нулю (флюгерное положение лопастей винта), на втором этапе при увеличении числа оборотов винта в пределах зоны уменьшают шаг винта до величины, обеспечивающей постоянство произведения текущих оборотов на шаг винта, а на третьем этапе при достижении винтом оборотов, соответствующих верхней границы зоны, шаг винта увеличивают до значения, соответствующего этим оборотам по комбинаторной диаграмме зависимости шага от числа оборотов. 1 ил.
СПОСОБ ПРОХОЖДЕНИЯ ЗОНЫ КРИТИЧЕСКИХ ОБОРОТОВ СУДОВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С ВИНТОМ РЕГУЛИРУЕМОГО ШАГА, заключающийся в изменении шага винта в зависимости от его оборотов, отличающийся тем, что, с целью сокращения времени прохождения зоны критических оборотов и уменьшения напряжений от крутильных колебаний в коленчатом вале двигателя, на первом этапе при достижении винтом числа оборотов нижней границы зоны критических оборотов уменьшают шаг винта до величины, при которой упор винта равен нулю, на втором этапе при увеличении числа оборотов винта в пределах зоны критических оборотов уменьшают шаг винта до величины, обеспечивающей постоянство произведения шага винта на текущую величину числа оборотов в пределах зоны критических оборотов, а на третьем этапе при достижении винтом числа оборотов, соответствующих верхнему значению зоны критических оборотов, величину шага винта увеличивают в соответствии с диаграммой зависимости шага винта от числа оборотов.
