1
Изобретение относится к двигателестроению.
Известны устройства для автоматического регулирования числа оборотов судового двигателя, содержащие канал управления и датчик числа оборотов, связанные через блок управления с командным механизмом.
Однако в известных устройствах не обеспечивается автоматическое прохождение зоны критических чисел оборотов двигателя.
Целью изобретения является исключение статической работы двигателя в зонах критических оборотов.
Для достижения поставленной цели в блок управления введен коммутатор, связанный входами с датчиком числа оборотов и с выходом пропорционально-интегрального регулятора, а выходами - с входами последнего и сумматора, другие входы которого связаны с выходом регулятора и с несколькими каналами управления, а выход - с командным механизмом.
Кроме того, в блок управления введена множительно-делительная ячейка, связанная входами с выходами коммутатора и корректора, а выходом - со входом корректора, другие входы которого соединены с одним из выходов сумматора и с каналом управления, а выход - с одним из входов коммутатора.
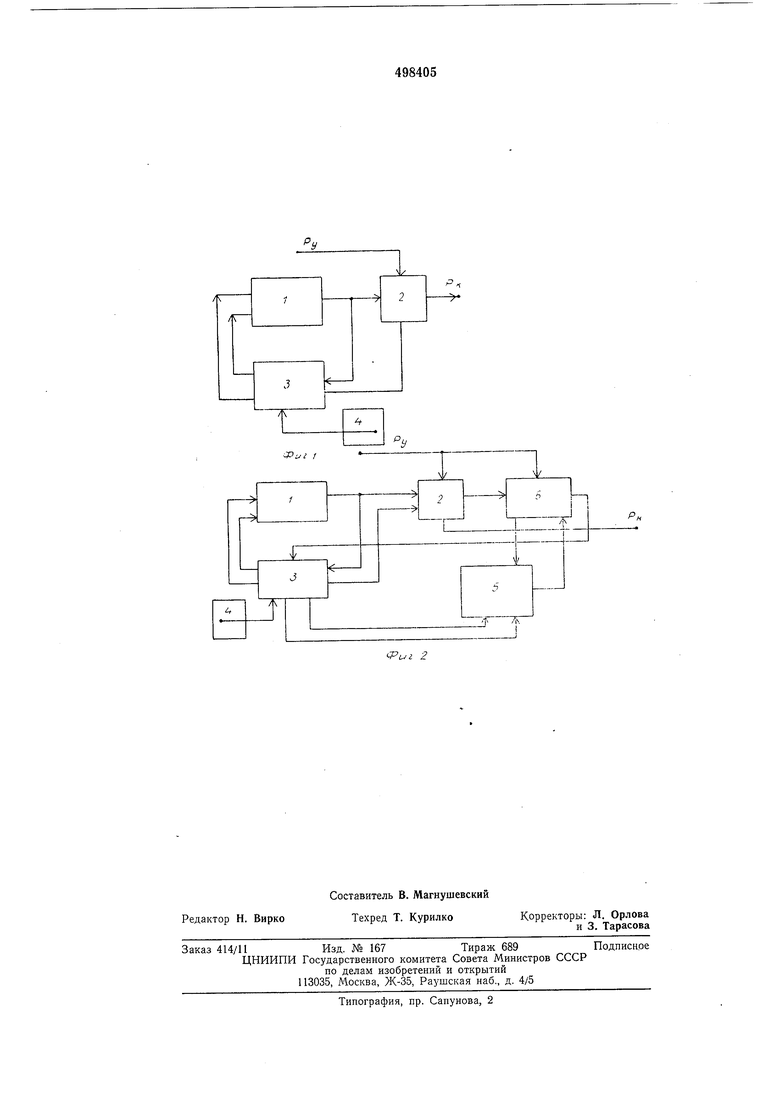
Иа фиг. 1 приведена блок-схема устройства
для двигателя с всережимным регулятором скорости; на фиг. 2 - тоже, для двигателя без всережимного регулятора.
Пропорционально-интегральный регулятор 1 формирует регулирующее воздействие по отклонению регулируемого параметра от заданной величины. Сумматор 2 служит для алгебраического суммирования командного сигнала Ру управления оборотами двигателя и выходного сигнала пропорционально-интегрального регулятора 1 в момент выхода оборотов двигателя на граничные точки зоны критических оборотов. Один вход сумматора связан с каналом управления, а выход - с командным механизмом (на чертежах не показан). Коммутатор 3 формирует эталонные дискретные сигналы, соответствующие оборотам двигателя на границах зоны критических чисел оборотов, и связан по входу с датчиком
числа оборотов 4. Множительно-делительная ячейка 5 служит для формирования стандартного диапазона текущего значения крутящего момента двигателя, соответствующего верхней (нижней) границе зоны критических оборотов.
Корректор 6 предназначен для формирования текущего значения уставки коммутатора 3.
В момент выхода оборотов двигателя, имеющего всережимньш регулятор скорости, на
нижнюю точку запретной зоны на выходе регулятора 1 появляется сигнал рассогласования. Командный сигнал РК, формируемый на выходе сумматора 2, представляет собой алгебраическую сумму сигнала Ру, поступающего из канала управления, и сигнала рассогласования на выходе регулятора 1. В результате обороты двигателя удерживаются на нижней границе запретной зоны. При увеличении сигнала Ру обороты двигателя также начинают расти; одновременно растет и сигнал рассогласования на выходе регулятора 1. В результате коррекции командный сигнал на выходе сумматора 2 уменьшается и становится равным команде, соответствующей оборотам нижней границы запретной зоны.
При сигнале рассогласования на выходе регулятора 1, равном щирине запретной зоны критических оборотов, на вход сумматора 2 с выхода коммутатора 3 поступает сигнал, в результате чего на выходе сумматора 2 происходит резкий скачок командного сигнала. Обороты двигателя быстро растут, минуя запретную зону. При прохождении верхней границы запретной зоны коммутатор 3 вырабатывает сигнал, необходимый для изменения знака регулирующего воздействия.
Если отсутствует всережимный регулятор скорости, то управление двигателем ведется непосредственно через орган, воздействующий на подачу рабочей среды.
В этом случае величина командных сигналов на выходе сумматора 2 определяет не число оборотов двигателя, а лишь подачу рабочей среды. Чтобы учитывать изменение характеристик потребления мощности нагрузкой и исключить тем самым работу двигателя в запретной зоне оборотов, уставка, по которой происходит снятие корректирующего воздействия с командного сигнала, автоматически смещается в зависимости от изменения коэффициента утяжеления винтовой характеристики. Для этого в множительно-делительной ячейке 5 осуществляется перемножение сигналов, соответствующих текущему крутящему моменту двигателя в нижней точке запретной зоны и крутящему моменту двигателя в верхней точке запретной зоны по номинальной винтовой характеристике, и последующее деление полученного сигнала на значение крутящего момента в нижней точке запретной зоны по номинальной винтовой характеристике. Результирующий сигнал соответствует предполагаемому значению крутящего момента двигателя при работе по текущей винтовой характеристике.
Формула изобретения
1.Устройство для автоматического регулирования числа оборотов судового двигателя,
содержащее канал управления и датчик числа оборотов, связанные через блок управления с командным механизмом, отличающееся тем, что, с целью исключения статической работы двигателя в зонах критических
оборотов, в блок управления введен коммутатор, связанный входами с датчиком числа оборотов и с выходом пропорционально-интегрального регулятора, а выходами - с входами последнего и сумматора, другие входы
которого связаны с выходом регулятора и с каналом управления, а выход - с командным механизмом.
2.Устройство по п. 1, отличающееся тем, что в блок управления введена множительно-делительная ячейка, связанная входами с выходами коммутатора и корректора, а выходом - со входом корректора, другие входы которого соединены с одним из выходов сумматора и с каналом управления, а выход - с
одним из входов коммутатора.
р
fui 2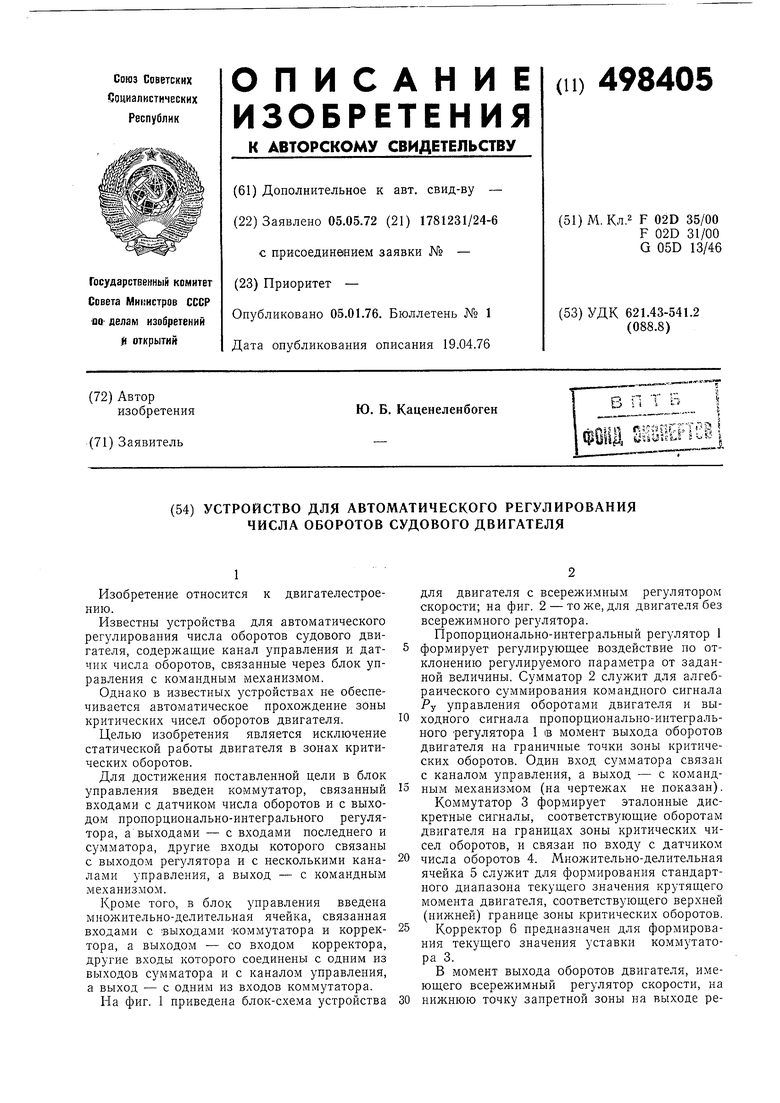
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1973 |
|
SU370595A1 |
| ПНЕВМАТИЧЕСКОЕ VCTPOfiCTBO ДЛЯ ДИСТАНЦИОННОГО | 1969 |
|
SU236898A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Датчик загрузки двигателя | 1978 |
|
SU723405A1 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1979 |
|
SU787266A1 |
| Система для автоматического и дистанционного управления многовальной дизельной установкой | 1977 |
|
SU708327A2 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ ВЫХОДА ВОЗДУШНЫХ И МОРСКИХ ПОДВИЖНЫХ ОБЪЕКТОВ ЗА РАЗРЕШЕННУЮ ЗОНУ И ВХОДА ИХ В ЗАПРЕТНЫЕ ЗОНЫ | 2006 |
|
RU2321044C2 |