Изобретение относится к устройствам борьбы с помехами и может быть использовано в обзорных и посадочных радиолокационных станциях (РЛС) с фазированными антенными решетками для улучшения обнаружения и сопровождения самолетов на фоне сложных пассивных помех.
Цель изобретения - повышение эффективности компенсации пассивных помех за счет дополнительного подавления в каналах обработки помехи с нулевой доплеровской частотой.
На фиг. 1 приведена структурная схема предложенного компенсатора; на фиг. 2 - схема приемно-передающего блока (ППБ); на фиг.3 - схема блока суммирования; на фиг.4 - схема комплексного умножителя; на фиг.5 -- схема первого накопителя; на фиг.6 - схема блока вычисления квадрата модуля; на фиг. 7 - схема делителей; на фиг.8 - схема блока поcтоянных запоминающих устройств, водящего в первый блок оценки вектора весовых коэффициентов; на фиг. 9 - схема пространственного согласованного фильтра; на фиг.10 - схема фильтра нулевых доплеровских частот; на фиг.11 - схема блока постоянных запоминающих устройств, входящего во второй блок оценки вектора весовых коэффициентов.
Адаптивный компенсатор пассивных помех (см. фиг.1) содержит N каналов 1 обработки, антенный элемент 2, приемно-передающий блок 3, второй 20 и третий 21 блоки задержки, вычитатель 22, первый блок 4 задержки и комплексный умножитель 5, первый 7 и второй 16 блоки оценки векторов весовых коэффициентов, пространственный согласованный фильтр 17, фильтр нулевых доплеровских частот 18, N комплексных умножителей 19 и блок 6 суммирования, блок вычисления модуля, блок 9 постоянных запоминающих устройств, комплексный умножитель 10, первый накопитель 11, первый делитель 12, блок 13 вычисления квадрата модуля,второй накопитель 14, второй делитель 15, блок 23 вычисления модуля, блок 24 постоянных запоминающих устройств, второй фильтр 25 нулевых доплеровских частот, первый фильтр 26 нулевых доплеровских частот, комплексный умножитель 27, накопитель 28 и делитель 29.
Приемно-передающий блок 3 (см. фиг.2) содержит антенный переключатель 30, усилитель высокой частоты 31, первый смеситель 32 и усилитель промежуточной частоты 33, второй смеситель 34 и усилитель мощности 35, фазовый детектор 36, первый аналого-цифровой преобразователь 37, второй фазовый детектор 38, второй аналого-цифровой преобразователь 39, фазовращатель 40.
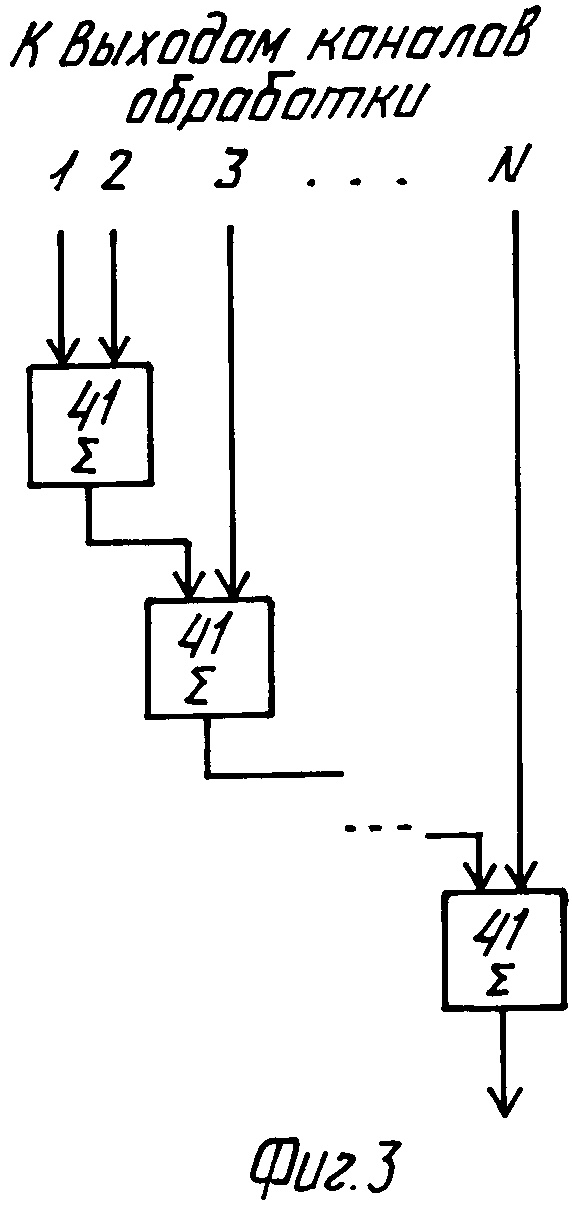
Блок суммирования (см. фиг.3) сдержит N сумматоров 41.
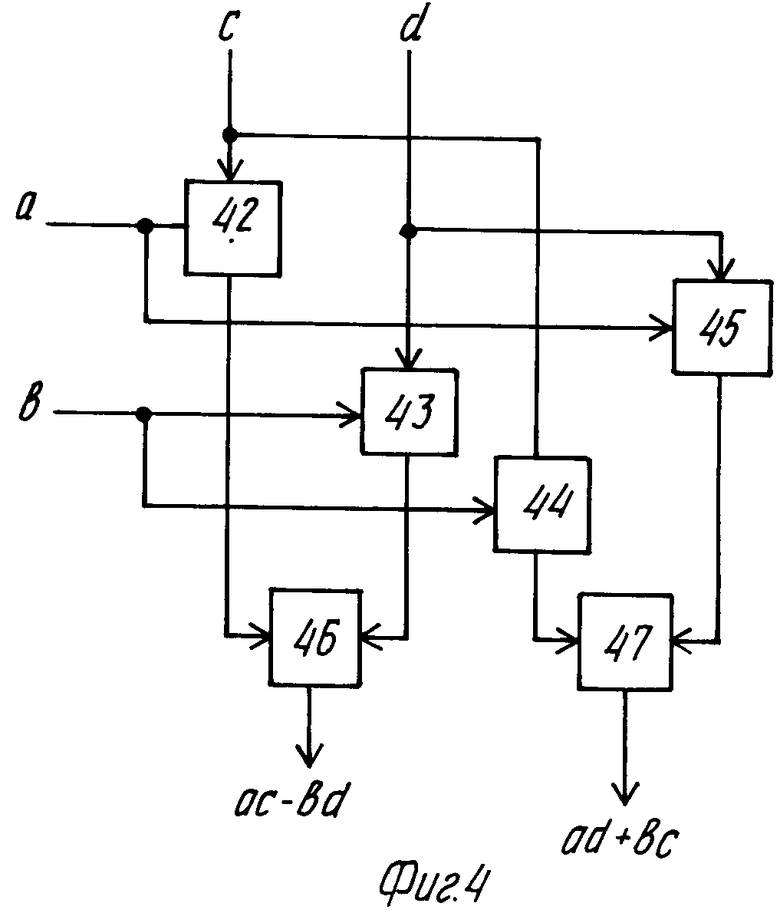
Комплексный умножитель (см. фиг.4) содержит первый 42, второй 43, третий 44 и четвертый 45 умножители действительных чисел, первый алгебраический двухвходовый сумматор 46, второй алгебраический двухвходовый сумматор 47.
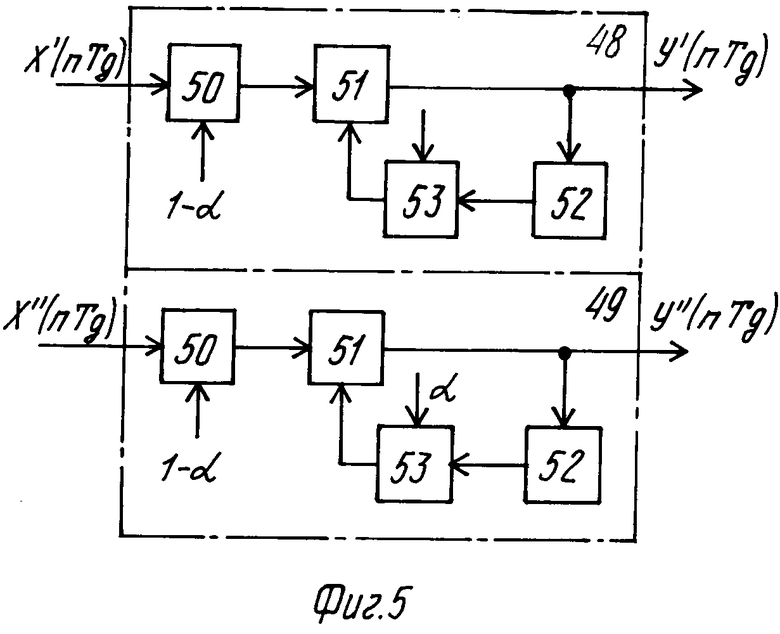
Накопители 11 и 28 (см. фиг.5) содержат два идентичных рекурсивных цифровых фильтра 48 и 49 первого порядка, каждый из которых включает последовательно соединенные первый умножитель 50, алгебраический сумматор 51, запоминающее устройство 52 и второй умножитель 53.
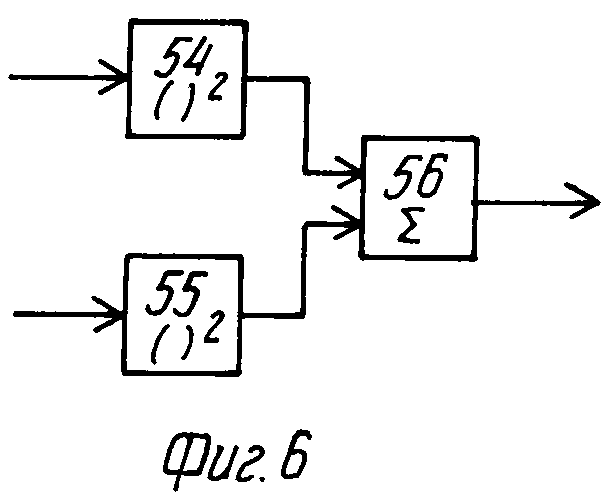
Схема вычисления квадрата модуля 13, входящая в первый блок 7 оценки вектора весовых коэффициентов (см. фиг.6) содержит, первый 54 и второй 55 квадраторы, выходы которых подключены к входам сумматора 56.
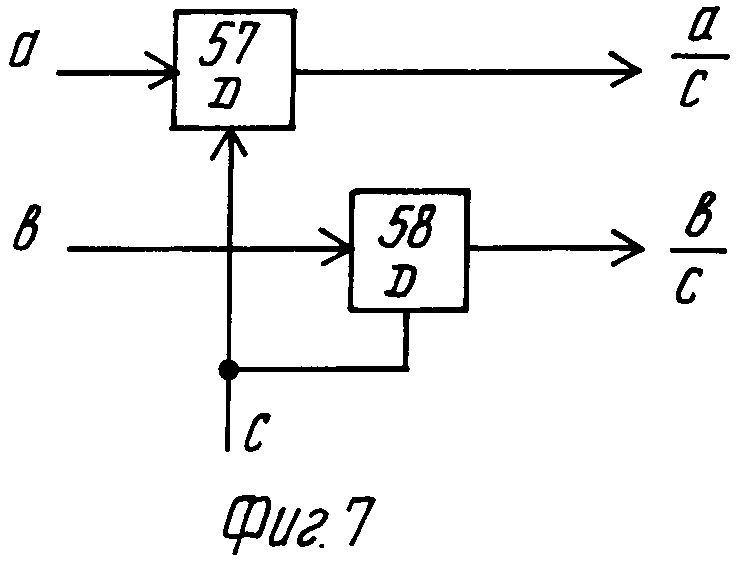
Первый делитель 12, входящий в первый блок 7 оценки вектора весовых коэффициентов и делитель 29, входящий во второй блок 16 оценки вектора весовых коэффициентов, реализуют операцию деления комплексного числа а+jb на действительное число С и содержат (см. фиг.7) два идентичных делителя 57, 58 действительных чисел.
Второй делитель 15, входящий в первый блок 7 оценки вектора весовых коэффициентов, представляет собой делитель действительных чисел.
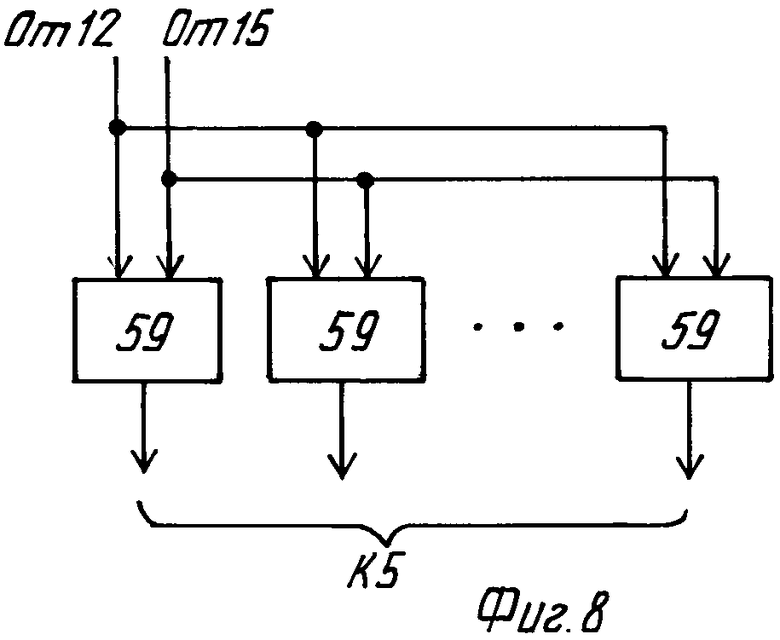
Блок 9 постоянных запоминающих устройств содержит (см. фиг.8) N постоянных запоминающих устройств 59.
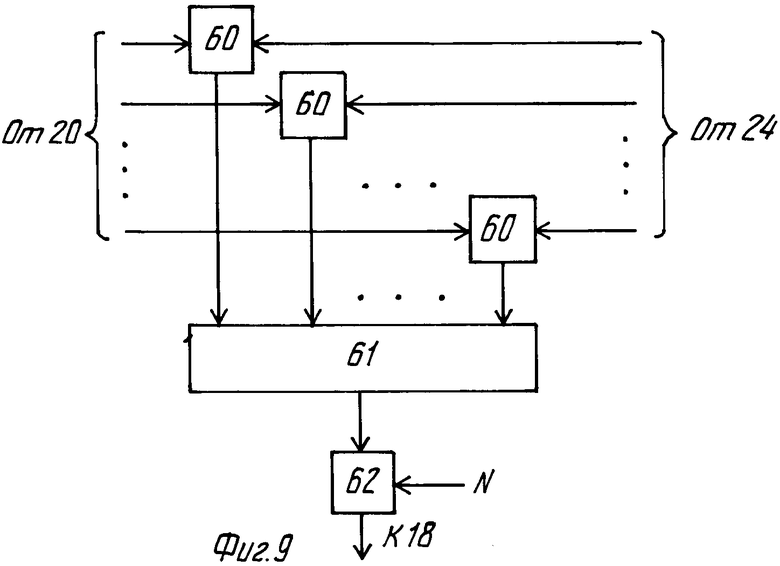
Пространственный согласованный фильтр 17 выполняет операцию весового суммирования и нормирования комплексных отсчетов и содержит (см. фиг.9) N комплексных умножителей 60, блок суммирования 61, делитель 62.
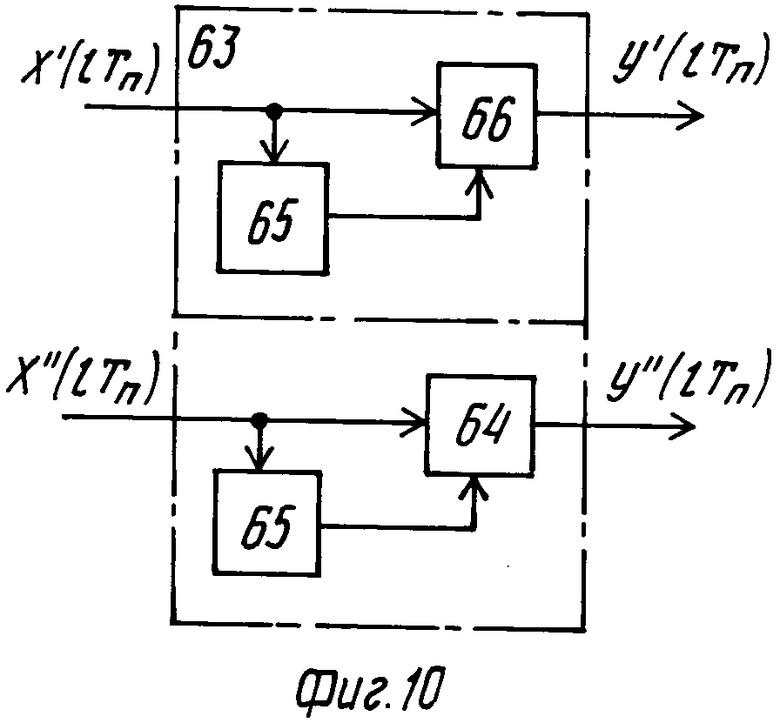
Первый 26 и второй 25 фильтры нулевых доплеровских частот, а также фильтр 18 нулевых доплеровских частот содержит (см.фиг.10) два идентичных нерекурсивных цифровых фильтра 63 и 64 первого порядка, каждый из которых содержит запоминающее устройство 65 и сумматор 66.
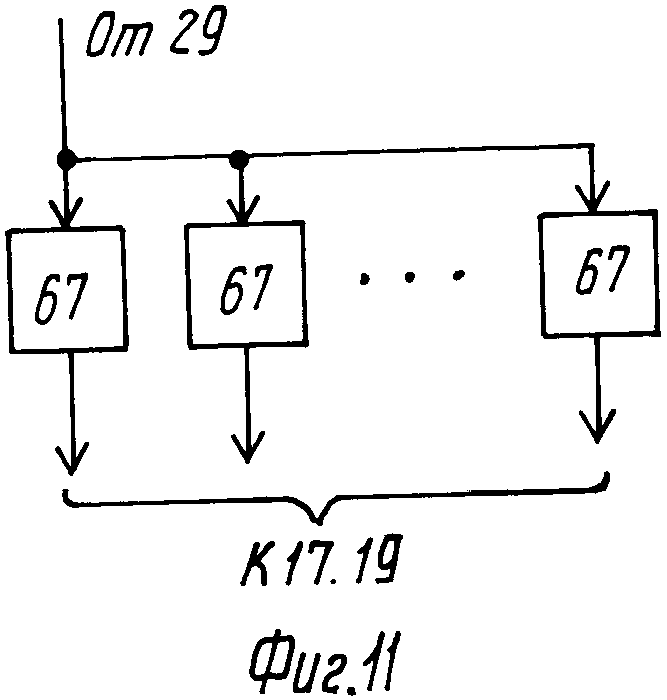
Блок 24 постоянных заминающих устройств, входящий во второй блок 16 оценки вектора весовых коэффициентов, содержит (см. фиг.11) N постоянных запоминающих устройств 67.
Работа адаптивного компенсатора пассивных помех заключается в следующем. В режиме приема отраженная от областей местных предметов и движущихся гидрометеоров электромагнитная волна улавливается антенными элементами 2, а затем усиливается и преобразуется приемно-передающими блоками 3N каналов обработки 1. На выходах фазовых детекторов 36 и 38 (см. фиг.2) выделяется комплексная огибающая пассивных помех, которая в аналого-цифровых преобразователях 37 и 39 подвергается временной дискретизации с периодом Тд и после амплитудного квантования преобразуется в многоразрядный параллельный двоичный код. Дискретные отсчеты комплексной огибающей помехи для одного элемента дальности на выходах всех N приемно-передающих блоков 3 представим (без учета эффектов квантования) в виде суммы двух векторов, каждый из которых содержит N элементов (l) =
(l) =  (l)+
(l)+ (l) = U1exp
(l) = U1exp j
j 2π(l-1)F1Tп+
2π(l-1)F1Tп+ +→
+→
→+ U2exp j
j 2π(l-1)F2Tп+
2π(l-1)F2Tп+ , (1) где U1 и U2, F1 и F2, Φ1 и Φ2 - амплитуды, доплеровские частоты и начальные фазы отражений от местных предметов и движущихся гидрометеоров соответственно:
, (1) где U1 и U2, F1 и F2, Φ1 и Φ2 - амплитуды, доплеровские частоты и начальные фазы отражений от местных предметов и движущихся гидрометеоров соответственно:
l - номер зондирования, =
=  1; exp (jΨsinϕ1); ...; exp[j(N-1)sinϕ1]
1; exp (jΨsinϕ1); ...; exp[j(N-1)sinϕ1] , (2)
, (2) =
=  1; exp (jΨsinϕ2); ...; exp[j(N-1)sinϕ2]
1; exp (jΨsinϕ2); ...; exp[j(N-1)sinϕ2] - (3) транспонированные векторы фазового распределения отражений от местных предметов и движущихся гидрометеоров на раскрыве антенных элементов;
- (3) транспонированные векторы фазового распределения отражений от местных предметов и движущихся гидрометеоров на раскрыве антенных элементов;
t - операция транспортирования.;
Ψ=2 π d/λо
d - расстояние между антенными элементами;
λо - длина электромагнитной волны;
ϕ1 и ϕ2 - углы между нормалью к линии антенных элементов и направлениями на местные предметы и движущиеся гидрометеоры соответственно.
Отсчеты комплексной огибающей помехи на выходах приемно-передающих блоков 3 первого и второго каналов обработки представляют первый и второй элементы вектора  (l) и определяются соотношениями V1(l)=U1exp{j[2 π(l-1)F1Tп+Φ1] } +U2exp{ j[2π(l-1)F2Tп+Φ2] } , V2(l)= U1exp{j[2π(l-1)F1Tп+Φ1] }exp(jΨsinϕ1)+
(l) и определяются соотношениями V1(l)=U1exp{j[2 π(l-1)F1Tп+Φ1] } +U2exp{ j[2π(l-1)F2Tп+Φ2] } , V2(l)= U1exp{j[2π(l-1)F1Tп+Φ1] }exp(jΨsinϕ1)+
+U2 exp{j[2π(l-1)F2Tп+Φ2]}exp(jΨsinϕ2)
Эти отсчеты поступают на первый 26 и второй 25 фильтры нулевых доплеровских частот, которые не пропускают дискретные отсчеты отражений от движущихся гидрометеоров. Полагая F1 ≈0 и F2>F1, на выходах этих фильтров имеем:
Z1(l)=U1exp(j Φ1),
Z2(l)=U1exp(j Φ2)exp(j Ψsin ϕ1).
На выходе комплексного умножителя 27 второго блока 16 оценки вектора весовых коэффициентов формируется величина
y1(l) = Z1(l)Z
В накопителе 28 осуществляется усреднение этих величин за несколько элементов разрешения по дальности, что в пределе дает математическое ожидание от комплексной экспоненты, умноженное на некоторый коэффициент К. На выходе накопителя 28 имеем оценку (l) = KU
(l) = KU ), где χ1 - модуль коэффициента фазовой корреляции отражений от местных предметов на раскрыве антенных элементов;
), где χ1 - модуль коэффициента фазовой корреляции отражений от местных предметов на раскрыве антенных элементов; - оценка угла ϕ1.
- оценка угла ϕ1.
На выходе блока 23 вычисления модуля формируется величина = KU
= KU = exp(-jΨsin
= exp(-jΨsin ), которая представляет многоразрядный двоичный код, подающийся в качестве адреса на блок 24 постоянных запоминающих устройств. На выходах постоянных запоминающих устройств 67 (см. фиг.11) появляются значения элементов вектора
), которая представляет многоразрядный двоичный код, подающийся в качестве адреса на блок 24 постоянных запоминающих устройств. На выходах постоянных запоминающих устройств 67 (см. фиг.11) появляются значения элементов вектора  весовых коэффициентов, который определяется выражением
весовых коэффициентов, который определяется выражением =
=  1; exp(-jΨsin
1; exp(-jΨsin ); ... ; exp[-j(N-1)Ψsin
); ... ; exp[-j(N-1)Ψsin )]
)]
Полагая, что  ϕ1 можно записать
ϕ1 можно записать =
=  (4)
(4)
Значения элементов вектора  подаются на первые N входов пространственного согласованного фильтра 17, на вторые N входов которого через вторые блоки 20 задержки каналов обработки поступают отсчеты комплексной огибающей помехи (1), задержанные на время, которое необходимо для формирования вектора
подаются на первые N входов пространственного согласованного фильтра 17, на вторые N входов которого через вторые блоки 20 задержки каналов обработки поступают отсчеты комплексной огибающей помехи (1), задержанные на время, которое необходимо для формирования вектора  во втором блоке 16 оценки вектора весовых коэффициентов. В пространственном согласованном фильтре 17 осуществляется весовое суммирование отсчетов помехи и их нормировка, которые дают на выходе фильтра 17 следующую величину:
во втором блоке 16 оценки вектора весовых коэффициентов. В пространственном согласованном фильтре 17 осуществляется весовое суммирование отсчетов помехи и их нормировка, которые дают на выходе фильтра 17 следующую величину:
Y1(l) =  (l)/N =
(l)/N =  (l)+
(l)+ (l)
(l) / N, где η- знак хромитовой сопряженности, т.е. комплексного сопряжения и транспортирования.
/ N, где η- знак хромитовой сопряженности, т.е. комплексного сопряжения и транспортирования.
Учитывая, что F1 ≈0 и 

 = N, получаем
= N, получаем
Y1(l) = U1exp (jφ1) +  (l)/ N (5) Поскольку фильтр 18 нулевых доплеровских частот не пропускает составляющие с частотой F2, на вторые входы комплексных умножителей 19 поступает только первое слагаемое выражение (5):
(l)/ N (5) Поскольку фильтр 18 нулевых доплеровских частот не пропускает составляющие с частотой F2, на вторые входы комплексных умножителей 19 поступает только первое слагаемое выражение (5):
Y2(l)=U1exp(j Φ1) (6) В комплексных умножителях 19 происходит умножение этой величины на комплексно-сопряженные элементы вектора  . Произведения на выходах комплексных умножителей 19 запишем в виде вектора
. Произведения на выходах комплексных умножителей 19 запишем в виде вектора (l) = Y2(l)
(l) = Y2(l) = U1exp(jφ1)
= U1exp(jφ1) (7)
(7)
Поэтому на выходах вычитателей 22 каналов 1 обработки образуются разности, представляющие собой элементы следующего вектора: (l) =
(l) =  (l)-
(l)- (l)
(l)
Учитывая, что F1 ≈0, и соотношения (1) и (7), получаем (l) = U2exp
(l) = U2exp j
j 2Π(l-1)F2Tп+
2Π(l-1)F2Tп+ (8)
(8)
Таким образом, мешающие отражения от местных предметов на выходах вычитателей 22 каналов 1 обработки оказались скомпенсированными, т.е. на выходах вычитателей 22 формируются величины, состоящие только из дискретных отсчетов комплексной огибающей отражений от движущихся гидрометеоров. Третьи блоки 21 задержки каналов обработки осуществляют задержку отсчетов на время, необходимое для выполнения операций в пространственном согласованном фильтре 17 и операции умножения в комплексных умножи- телях 19.
Последующая обработка направлена на компенсацию отражений от движущихся гидрометеоров.
В качестве критерия эффективности заявляемого адаптивного компенсатора воспользуемся коэффициентом подавления помехи:
Кп= -10lg(Pвых/Рвх), где Рвых и Рвх - мощность помехи соответственно на выходе и входе компенсатора.
Таким образом, эффективность адаптивного компенсатора инвариантна по отношению к направлениям прихода мешающих отражений. Это выгодно отличает предлагаемый адаптивный компенсатор от прототипа, эффективность которого существенно падает при наличии мешающих отражений, приходящих с двух различных направлений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2042151C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2323452C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ СИСТЕМЫ ПОСАДКИ | 1990 |
|
SU1760868A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| ФИЛЬТР РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2016 |
|
RU2642418C1 |
| АДАПТИВНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР | 2017 |
|
RU2660645C1 |
| ПСЕВДОКОГЕРЕНТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1989 |
|
SU1757337A1 |
| ФИЛЬТР РЕЖЕКЦИИ ПОМЕХ | 2017 |
|
RU2660803C1 |

Использование: улучшение обнаружения и сопровождения самолетов на фоне сложных пассивных помех. Сущность изобретения: компенсатор содержит N каналов обработки 1, блок 6 суммирования, блоки 7, 16 оценки векторов весовых коэффициентов, пространственный согласованный фильтр 17, фильтр 18 нулевых допплеровских частот, N комплексных умножителей 19. 16, 1-16-17, 1-17-18-19-1, 16-19, 1-7-1. Это позволяет повысить эффективность компенсации пассивных помех за счет дополнительного подавления в каналах обработки помехи с нулевой доплеровской частотой. 11 ил.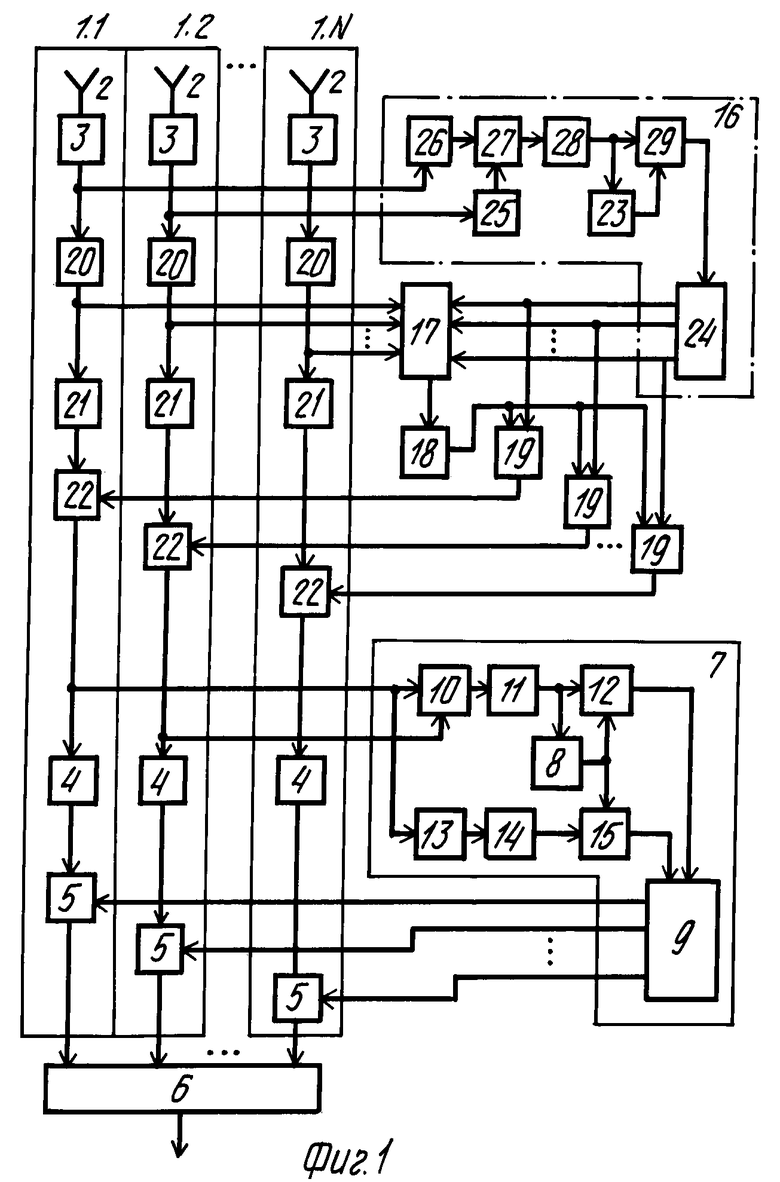
АДАПТИВНЫЙ КОМПЕНСАТОР ПАССИВНЫХ ПОМЕХ, содержащий N каналов обработки, блок суммирования, выход которого является выходом устройства, и первый блок оценки вектора весовых коэффициентов, при этом каждый из N каналов обработки содержит последовательно соединенные антенный элемент и приемно-передающий блок, а также последовательно соединенные первый блок задержки и комплексный умножитель, причем входы блока суммирования соединены с выходом комплексных умножителей N каналов обработки, кроме того, первый блок оценки вектора весовых коэффициентов содержит блок вычисления модуля, блок постоянных запоминающих устройств, последовательно соединенные комплексный умножитель, первый и второй входы которого соединены с входами первых блоков задержки, первого и второго каналов обработки, первый накопитель и первый делитель, а также последовательно соединенные блок вычисления квадрата модуля, вход которого соединен с первым входом комплексного умножителя, второй накопитель и второй делитель, причем вход блока вычисления модуля соединен с выходом первого накопителя, а выход соединен с вторыми входами первого и второго делителей, выходы которых соединены с первым и вторым входами блока постоянных запоминающих устройство, N выходов которого соединены с соответствующими вторыми входами комплексных умножителей N каналов обработки, отличающийся тем, что введены второй блок оценки вектора весовых коэффициентов, пространственный согласованный фильтр, фильтр нулевых допплеровских частот и N комплексных умножителей, кроме того, в каждый из N каналов обработки включены последовательно соединенные второй и третий блоки задержки и вычитатель, причем вход второго блока задержки соединен с выходом приемно-передающего блока, второй вход вычитателя соединен с выходом соответствующего из введенных N комплексных умножителей, выход вычитателя соединен с входом первого блока задержки, при этом второй блок оценки вектора весовых коэффициентов содержит блок вычисления модуля, блок постоянных запоминающих устройств, последовательно соединенные первый фильтр нулевых допплеровских частот, комплексный умножитель, накопитель и делитель, вход блока вычисления модуля соединен с выходом накопителя, выход блока вычисления модуля соединен с вторым входом делителя, выход которого соединен с входом блока постоянных запоминающих устройств, N выходов которого соединена с первыми входами N комплексных умножителей и первыми N входами пространственного согласованного фильтра, входы первого и второго фильтров нулевых допплеровских частот соединены с выходами приемно-передающих блоков первого и второго каналов обработки соответственно, причем вторые N входов пространственного согласованного фильтра соединены с выходами вторых блоков задержки, входящих в N каналов обработки, выход пространственного согласованного фильтра соединен через фильтр нулевых допплеровских частот с вторыми входами N комплексных умножителей.
| Ю.В | |||
| Иванов и др | |||
| Оценка эффективности подавления помехи вкогерентно-импульсной радиолокационной станции с фазированной антенной решеткой | |||
| Вопросы радиоэлектроники, сер | |||
| ОВР, 1991, вып.19, рис.3б. |
