Изобретение относится к строительству и предназначено для проведения наземных геодезических съемок и монтажных работ при возведении зданий и сооружений.
Может быть также использовано в машинах и механизмах, местоположение которых в пространстве является объектом управления, например для управления землеройно-транспортными машинами при движении по криволинейным траекториям.
Известна система для определения местоположения объекта на рабочей площадке, состоящая лазерного устройства и двух уголковый отражатель (1).
Недостатком системы является то, что с ее помощью можно точно определить только одну координату строительного агрегата, что не дает достаточного представления о его местоположении.
Наиболее близким по технической сущности является система для определения местоположения объекта на рабочей площадке, содержащая приемно-передающее устройство с приводом вращения и первичный и вторичный источники питания (2).
Недостаток системы заключается в ограниченных функциональных возможностях, поскольку определяются направлением и положением опорных плоскостей, создаваемых лазерным излучением, кроме того, система не вычисляет кинематических параметров, определяющих положение агрегата в пространстве.
Невозможность определения текущих значений кинематических параметров, характеризующих положение агрегата в текущий момент времени, не позволяет задать закон движения агрегата в 3-х мерном пространстве, что в конечном счете сужает его функциональные возможности, невысока точность определения координат агрегата.
Целью изобретения является расширение функциональных возможностей системы, повышение точности определения координат точек на рабочей площадке, увеличение объема и повышение оперативности получаемой информации.
Указанная цель достигается тем, что система для определения местоположения объекта на рабочей площадке, содержащая приемно-передающее устройство с приводом вращения и первичный и вторичный источники питания, причем первичный источник питания подключен к приводу вращения и через вторичный источник питания к одному из входов приемно-передающего устройства, снабжена датчиком начала отсчета угла поворота, измерителем угла, вычислительным устройством, блоком отображения информации и тремя угловыми отражателями с задатчиком координат, а приемно-передающее устройство выполнено в виде двух фотоприемников с соответствующими преобразователями и оптически связанных лазерного излучателя с коллиматором, цилиндрической линзы, двух отклоняющих зеркал, первое из которых выполнено полупрозрачным и двух приемных зеркал, оптически связанных с фотоприемниками, при этом приемные и отклоняющие зеркала оптически связаны с уголковыми отражателями, причем выходы преобразователей являются первым и вторым выходами приемно-передающего устройства, которые подключены к первому и второму входам вычислительного устройства, третий вход вычислительного блока подключен к задатчику координат уголковых отражателей, остальные входы которого соединены с измерителем угла поворота, с датчиком начала отсчета угла поворота и с первичным источником питания, который подключен к входу блока отображения информации, вход которого соединен с выходом вычислительного устройства, а остальные выходы приемно-передающего устройства соединены с датчиком начала отсчета угла поворота и измерителем угла поворота.
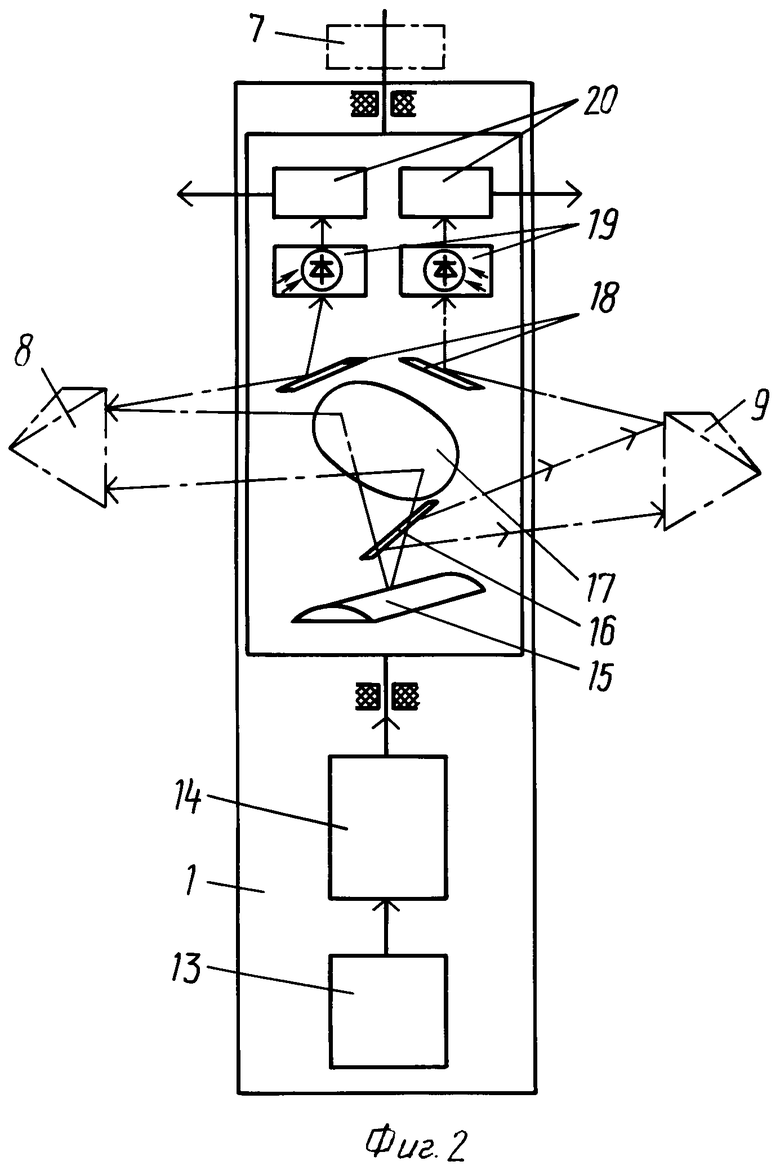
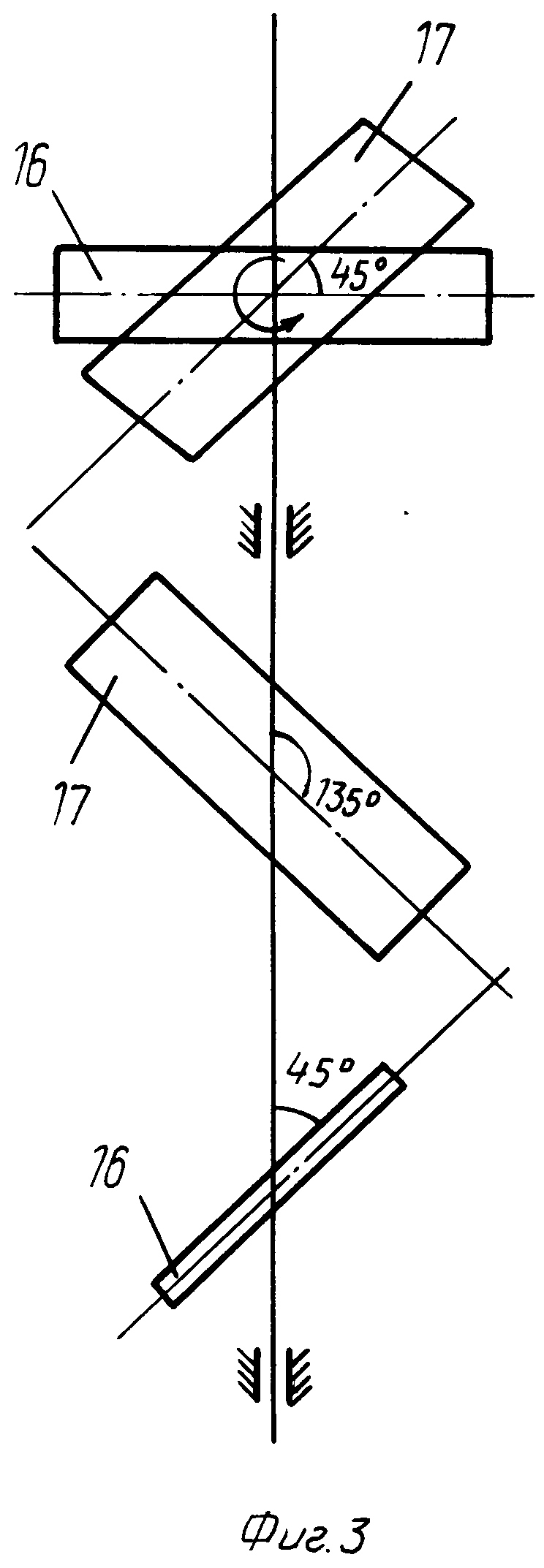
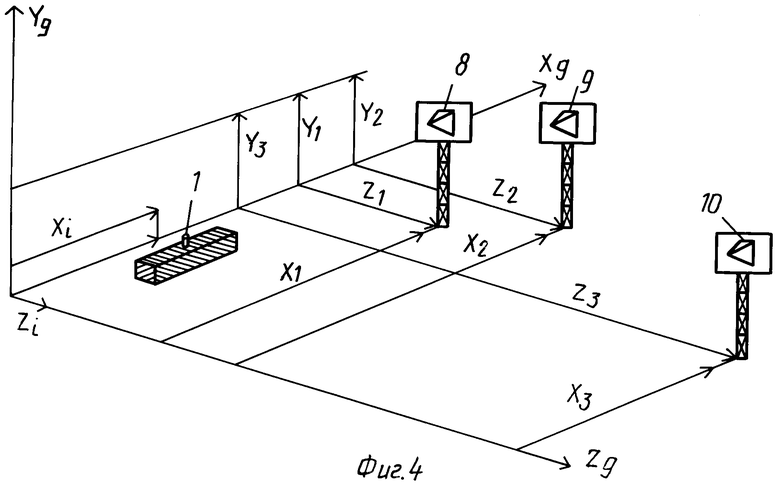
На фиг. 1 представлена структурная схема предлагаемой системы; на фиг. 2 - выполнение приемно-передающего устройства; на фиг. 3 - схема отсчета углов зеркал приемно-передающего устройства; на фиг. 4 - пример размещения уголковых отражателей с кооpдинатами X1Y1Z1, X2Y2Z2, X3Y3Z3 в земной XgYgZg системе отсчета соответственно и оптико-механического узла приемно-передающего устройства с координатами X0Y0Z0.
Структурная схема системы содержит приемно-передающее устройство 1 с приводом 2 вращения, первичный источник 3 питания, вторичный источник 4 питания, вычислительное устройство 5, датчик 6 начала отсчета угла поворота, измеритель 7 угла, уголковые отражатели 8, 9 и 10 с задатчиком 11 координат и блок 12 отображения информации. Приемно-передающее устройство 1 включает лазерный измеритель 13 с коллиматором 14, вращающее устройство, состоящее из цилиндрической линзы 15, отклоняющего полупрозрачного зеркала 16, отклоняющего зеркала 17, двух приемных зеркал 18, фотоприемников 18 и преобразователей 19.
Цилиндрическая линза 15 закреплена внутри корпуса вращающего устройства жестко.
Полупрозрачное зеркало 16 установлено (фиг. 3) под углом 45о к оптической оси, проходящей через лазерный излучатель 13, коллиматор 14 и вращающееся оптическое устройство. Отклоняющее зеркало 17 установлено под углом 136о к оптической оси и развернуто относительно оптической оси на фиксированный прямой угол.
Устройство закрепления зеркала 17 имеет одну-три степени свободы (угловые).
Приемные отклоняющие зеркала 18 установлены под углами, обеспечивающими надежный прием отраженных от уголковых отражателей 8, 9 и 10 лучей.
Система работает следующим образом.
На рабочей площадке (мерном поле) в принятой системе координат устанавливают уголковые отражатели 8, 9 и 10, координаты которых определяют известными геодезическими методами и вводят в задатчик 11 координат в требуемой точке 5 рабочей площадки (или на агрегате), устанавливают штатив (стапель) с системой определения координат. При включении лазерного излучателя 13 луч (световой поток) проходит коллиматор 14, затем попадает на цилиндрическую линзу 15, где развертывается в луч, формой секторной плоскости. Развернутый в плоскость луч попадает на отклоняющее полупрозрачное зеркало 16. Часть световой энергии луча отклоняется зеркалом 16 на прямой угол 90о относительно оптической оси, часть проходит и попадает на зеркало 17, которое изменяет направление плоскости луча на прямой угол относительно оптической оси (фиг. 4). При вращении оптико-механического устройства приемно-передающего устройства 1 сканирующие лазерные лучи попадают на уголковые отражатели 8, 9 и 10. Отраженные лучи с частотой, определяемой скоростью вращения вращающего устройства, попадают на приемные отклоняющие зеркала 18. От зеркал лучи попадают в фотоприемник 19. В фотоприемниках 19 возбуждается электрический сигнал, который через преобразователь 20 поступает в вычислительное устройство 5.
Одновременно в вычислительное устройство 5 поступает информация с датчика 6 и измерителя 7, а также с задатчика 11 геодезические координаты X1Y1Z1, i = 1, 2, 3 уголковых отражателей 8, 9 и 10.
По заданному алгоритму вычисляются координаты X0Y0Z0 точки рабочего поля.
Вычисленные значения координат поступают в устройство 12 отображения информации.
При определении положения мобильного агрегата на рабочей площадке систему определения координат устанавливают на борту агрегата. Рабочий процесс определения линейных координат агрегата аналогичен процессу определения координат точек на рабочей площадке.
Данная система позволит расширить функциональные возможности лазерных систем измерения и управления агрегатами при выполнении геодезических и монтажных работ: увеличить объем и оперативность получаемой информации, повысить точность определения, координат, а следовательно, повысить производительность труда при выполнении геодезических работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| УСТРОЙСТВО ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА | 2012 |
|
RU2516376C2 |
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1991 |
|
RU2069839C1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| СПУТНИКОВАЯ ЛАЗЕРНАЯ ДАЛЬНОМЕРНАЯ СИСТЕМА | 1992 |
|
RU2037849C1 |
Использование: строительство. Изобретение предназначено для проведения наземных геодезических съемок и монтажных работ при возведении зданий и сооружений. Сущность изобретения: система для определения местоположения объекта на рабочей площадке содержит приемно-передающее устройство 1 с приводом 2 вращения, первичный 3 и вторичный 4 источники питания, вычислительное устройство 5, датчик 6 начала отсчета угла поворота, измеритель 7 угла, уголковые отражатели 8, 9 и 10 с задатчиком 11 координат, блок 12 отображения информации. 4 ил.
СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НА РАБОЧЕЙ ПЛОЩАДКЕ, содержащая приемно-передающее устройство с приводом вращения и первичный и вторичный источники питания, причем первичный источник питания подключен к приводу вращения и через вторичный источник питания к одному из входов приемно-передающего устройства, отличающаяся тем, что она снабжена датчиком начала отсчета угла поворота, измерителем угля, вычислительным устройством, блоком отображения информации и тремя уголковыми отражателями с задатчиком координат, а приемно-передающее устройство выполнено в виде двух фотоприемников с соответствующими преобразователями и оптически связанных лазерного излучателя с коллиматором, цилиндрической линзы, двух отклоняющих зеркал, первое из которых выполнено полупрозрачным, и двух приемных зеркал, оптически связанных с фотоприемниками, при этом приемные и отклоняющие зеркала оптически связаны с уголковыми отражателями, причем выходы преобразователей являются первым и вторым выходами приемно-передающего устройства, которые подключены к первому и второму входам вычислительного устройства, третий вход вычислительного устройства подключен к задатчику координат уголковых отражателей, остальные входы которого соединены с измерителем угла поворота, датчиком начала отсчета угла поворота с первичным источником питания, который подключен к входу блока отображения информации, вход которого соединен с выходом вычислительного устройства, а остальные выходы приемно-передающего устройства соединены с датчиком начала отсчета угла поворота и измерителем угла поворота.
