Изобретение относится к машиностроению и может быть использовано в бесступенчатых передачах самоходных и других машин, в частности в инерционных трансформаторах вращающего момента.
Наиболее близким по технической сущности к изобретению является механизм свободного хода, содержащий внутреннюю и наружную звездочки с впадинами в виде ячеек и цилиндрические ролики, расположенные в ячейках наружной звездочки с возможностью перемещения относительно последних, каждый из которых контактирует с соответствующей рабочей поверхностью ячейки внутренней звездочки.
В этом механизме отсутствуют поджимные упругие элементы, а ролики могут быть выполнены менее массивными, чем собачки храпового механизма свободного хода при прочих равных условиях, что способствует повышению долговечности механизма. Существенным недостатком является ударное включение механизма свободного хода. Ролики в процессе работы механизма свободного хода могут занимать произвольное положение между соответствующими рабочими поверхностями внутренней звездочки и ячейками наружной звездочки. При использовании данных механизмов свободного хода в быстроходных передачах ролики совершают колебания между звездочками и в момент включения механизма свободного хода могут не попасть в ближайшие ячейки наружной звездочки. Тогда последующее зацепление роликов между звездочками произойдет с ударом. Все это приводит к снижению долговечности механизма свободного хода. Поэтому данные механизмы свободного хода пригодны для относительно тихоходных передач.
Задачей изобретения является повышение долговечности механизма свободного хода.
Для решения поставленной задачи механизм свободного хода, содержащий внутреннюю и наружную звездочки с впадинами в виде ячеек и цилиндрические ролики, расположенные в ячейках наружной звездочки с возможностью перемещения относительно последних и в контакте с соответствующей рабочей поверхностью ячейки внутренней звездочки, снабжен двумя дисковыми поводками, установленными соосно со звездочками с возможностью вращения относительно последних, каждый из которых имеет пазы по числу роликов, расположенные перпендикулярно соответствующим рабочим поверхностям ячеек внутренней звездочки, а концы роликов установлены в пазах дисков.
На фиг. 1 показан механизм свободного хода; на фиг.2 - разрез А-А на фиг.1.
Механизм свободного хода содержит внутреннюю 1 и наружную 2 звездочки с впадинами в виде ячеек 3 и 4, цилиндрические ролики 5, расположенные на рабочих поверхностях 6 внутренней звездочки и в ячейках 3 наружной звездочки. Два дисковых поводка 7 с пазами 8, в которых установлены концы 9 роликов 5. На фиг. 1 механизм свободного хода изображен в положении, в котором его элементы подготовлены для передачи крутящего момента против хода часовой стрелки от внутренней звездочки 1 к наружной (для упрощения - неподвижной). В этом положении ролики 5, располагаясь в ячейках 3 наружной звездочки 2, контактируют с рабочими поверхностями 6 внутренней звездочки 1, перпендикулярными соответствующим пазам 8 дисковых поводков 7. Таким образом, крутящий момент передается от внутренней звездочки 1 к наружной через ролик 5 посредством нормальных сил (аналогично храповому МСХ) вследствие защемления ролика между рабочей поверхностью внутренней звездочки и ячейкой наружной звездочки в отличие от фрикционных роликовых МСХ, где момент передается посредством сил трения вследствие клинового эффекта (заклинивания ролика между плоскими рабочими поверхностями ведущей и ведомой обойм).
Если в положении механизма (см.фиг.1) к внутренней звездочке приложен крутящий момент, направленный по часовой стрелке, то он не передается на наружную звездочку. Ролики 5 захватываются внутренней звездочкой 1, попадают в ее ячейки и через концы 9 роликов, расположенные в пазах 8, момент передается дисковым поводкам 7. Внутренняя звездочка 1, ролики 5 и дисковые поводки 7 вращаются по часовой стрелке как единое целое. Механизм совершает свободный ход. В период свободного хода механизма ролики 5 находятся в ячейках внутренней звездочки, а пазы 8 дисковых поводков 7 неперпендикулярны соответствующим рабочим поверхностям 6 внутренней звездочки 1. При торможении внутренней звездочки и движении дисковых поводков по инерции относительно внутренней звездочки пазы дисковых поводков стремятся занять положение, перпендикулярное соответствующим рабочим поверхностям внутренней звездочки. В результате ролики перемещаются вдоль пазов до контакта с наружной звездочкой и механизм оказывается подготовленным к последующей передаче крутящего момента против хода часовой стрелки от внутренней звездочки к наружной.
Таким образом, в механизме свободного хода обеспечивается своевременное защемление роликов между звездочками в момент включения механизма свободного хода, что способствует уменьшению ударных нагрузок в зацеплении и повышении долговечности механизма, особенно в условиях таких динамически высоконагруженных передач, как инерционные трансформаторы вращающего момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая бесступенчатая передача | 1989 |
|
SU1670264A1 |
| Механизм свободного хода | 1985 |
|
SU1341408A1 |
| Импульсный гайковерт | 1988 |
|
SU1586903A1 |
| АВТОМАТИЧЕСКИЙ ПРИВОД | 1994 |
|
RU2082050C1 |
| Инерционный трансформатор вращающего момента | 1985 |
|
SU1272039A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2013677C1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2008542C1 |
| Храповой механизм свободного хода | 1991 |
|
SU1784784A1 |
| РОЛИКОВАЯ МУФТА СВОБОДНОГО ХОДА | 2002 |
|
RU2224923C2 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2005 |
|
RU2297559C1 |
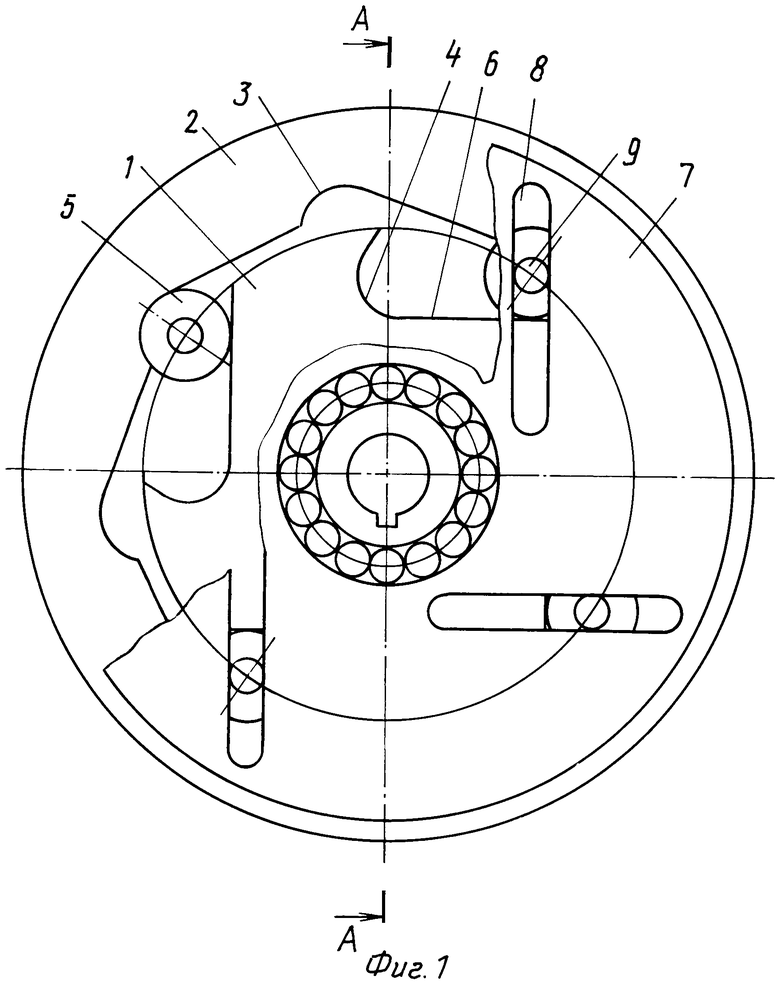
Использование: в бесступенчатых передачах самоходных и других машинах, в частности в инерционных трансформаторах вращающего момента. Сущность изобретения: механизм свободного хода содержит внутреннюю 1 и наружную 2 звездочки, цилиндрические ролики 5, расположенные в ячейках звездочек, два дисковых поводка 7 с пазами 8, в которых установлены концы 9 роликов 5. При вращении внутренней звездочки 1 по часовой стрелке ролики 5, находясь в углублениях внутренней звездочки 1, перемещаются вместе с последней и увлекают своими концами 9 дисковые поводки 7. При торможении внутренней звездочки 1 дисковые поводки 7, свободно установленные на ней, по инерции продолжают вращаться по часовой стрелке, в результате ролики 5, накатываясь на рабочие поверхности 6 внутренней звездочки 1 под действием составляющих сил реакций, направленных вдоль пазов 8, перемещаются вдоль пазов и попадают в ячейки наружной звездочки 2. Таким образом механизм оказывается подготовленным к последующему включению. При вращении внутренней звездочки 1 против часовой стрелки один из роликов 5 защемляется между внутренней 1 и наружной 2 звездочками и передает нагрузку. 2 ил.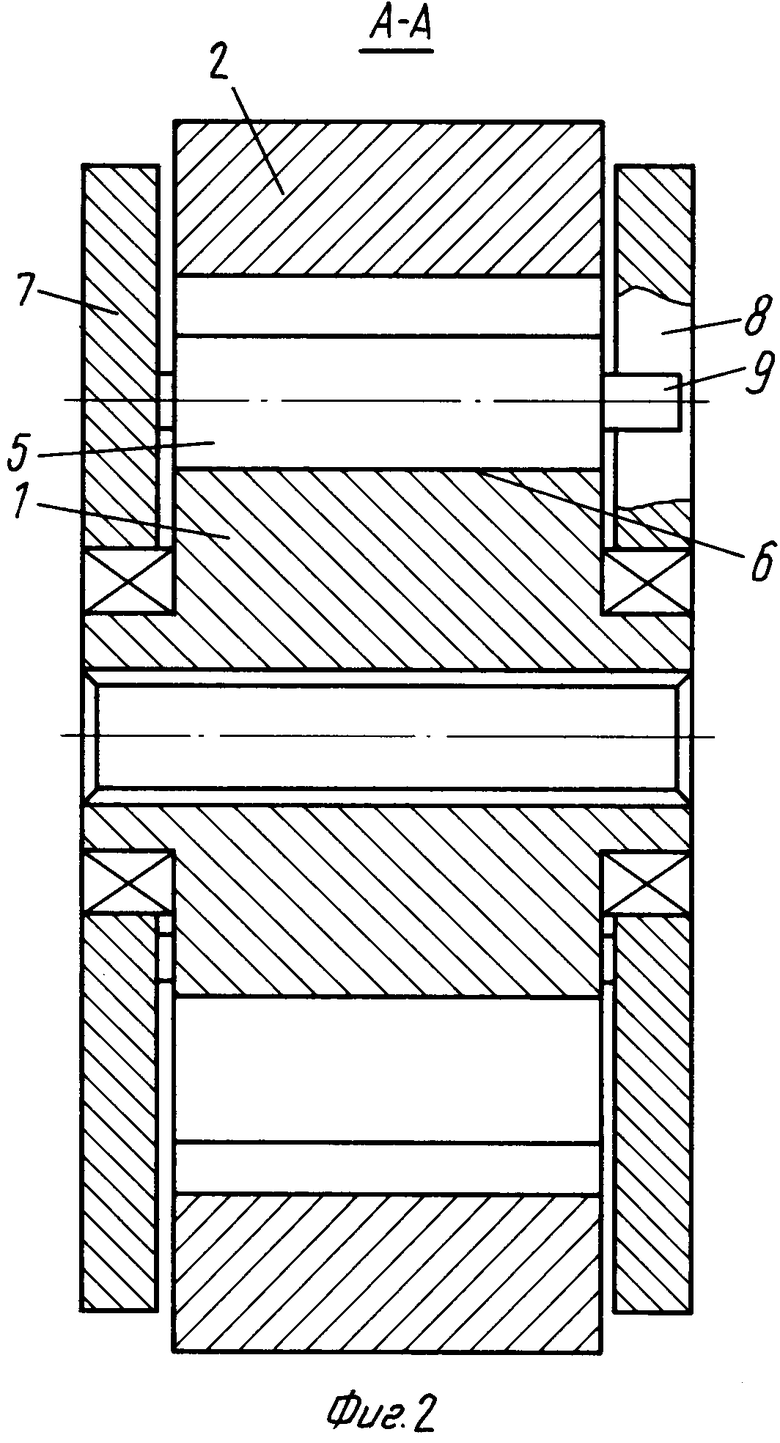
МЕХАНИЗМ СВОБОДНОГО ХОДА, содержащий внутреннюю и наружную звездочки с впадинами в виде ячеек и цилиндрические ролики, расположенные в ячейках наружной звездочки с возможностью перемещения относительно последних и в контатке с соответствующей рабочей поверхностью ячейки внутренней звездочки, отличающийся тем, что он снабжен двумя дисковыми поводками, установленными соосно со звездочками с возможностью вращения относительно последних, каждый из которых имеет пазы по числу роликов, расположенные перпендикулярно к соответствующим рабочим поверхностям ячеек внутренней звездочки, а концы роликов установлены в пазах дисковых поводков.
| Мальцев В.Ф., Роликовые механизмы свободного хода, М.: Машиностроение, 1968, с.25, рис.27. |
