Изобретение относится к машиностроению и может быть использовано в импульсных бесступенчатых передачах, в частности в инерционных трансформаторах вращающего момента.
Известен храповой механизм свободного хода, который содержит храповое колесо, обойму, установленные в ней собачки, контактирующие с зубьями храпового колеса, и пружины, поджимающие собачки к храповому колесу (Леонов А. И. Микрохраповые механизмы свободного хода. М. : Машиностроение, 1982, с. 63. . . 80).
В таком механизме в период всего свободного хода собачки контактируют с зубьями храпового колеса. При малых скоростях храпового колеса, когда собачки скользят по его зубьям без отрыва, механизм находится в постоянной готовности к последующему включению. Износ в этом случае обусловлен только незначительным трением между зубьями храповика и собачек. При более высоких скоростях храпового колеса собачки совершают вынужденные колебания, сопровождающиеся ударами по обойме и храповому колесу. При этом происходит интенсивный износ зубьев храпового колеса и собачек. В результате колебаний собачек возникает проблема своевременного включения механизма свободного хода, особенно характерная для импульсных бесступенчатых передач, в частности инерционных трансформаторов вращающегося момента, в условиях которого механизмы свободного хода имеют высокую частоту включений, а их храповые колеса большие угловые скорости и ускорения.
В момент включения механизма, когда скорость храпового колеса равна нулю, собачки могут оказаться в произвольном положении, в том числе и не находиться на поверхности храпового колеса. Замыкание механизма в этом случае произойдет при угловой скорости хpапового колеса, отличной от нуля, что ведет к ударному включению механизма и, как следствие, к pазрушению зубьев храповика и собачек, т. е. снижению долговечности механизма.
Наиболее близким по технической сущности к изобретению является храповой механизм свободного хода, содержащий храповое колесо с дисковыми поводками, обойму, установленные в ней собачки, контактирующие с зубьями храпового колеса, два кольцевых ограничителя, установленных концентрично храповому колесу и связанных с ним, и упоры, выполненные на боковых гранях собачек и контактирующие с дисковыми поводками. Каждый из упоров размещен внутри ограничителей и выполнен в виде сектора, ось которого совпадает с вершиной контактной поверхности собачки [1] .
В данном механизме в период свободного хода собачки выводятся из контакта с зубьями храпового колеса посредством сил трения, постоянно действующих между дисковыми поводками и упоpами собачек. В момент включения механизма силы трения меняют знак, способствуя введению собачек в контакт с храповым колесом.
Однако наличие постоянной фрикционной связи приводит к износу контактирующих поверхностей этих элементов и снижению долговечности механизма свободного хода. Существенным недостатком данного механизма является то, что при работе его в импульсных бесступенчатых передачах, в частности в инерционных трансформатоpах вращающего момента, в процессе интенсивного включения механизма свободного хода также сохраняется проблема своевременного замыкания собачек с зубьями храпового колеса, что приводит к ударному включению механизма свободного хода и последующей поломке механизма.
Целью изобретения является повышение долговечности механизма свободного хода.
Это достигается тем, что в механизме свободного хода, содержащем храповое колесо с дисковыми поводками, связанными с колесом в окружном направлении, установленные в ней собачки, контактирующие с зубьями храпового колеса, два кольцевых ограничителя, установленных концентрично храповому колесу, и упоры, выполненные на боковых гранях и собачек, каждый из которых pазмещен внутри ограничителей и выполнен в виде сектора, ось которого совпадает с вершиной контактной поверхности собачки, дисковые поводки выполнены в виде турбинных лопастных колес и установлены с осевым зазором относительно упоров с возможностью подачи направленного потока среды на поверхность собачки, обращенную к храповому колесу, собачки поджаты к храповому колесу упругими элементами, а кольцевые огpаничители установлены в обойме.
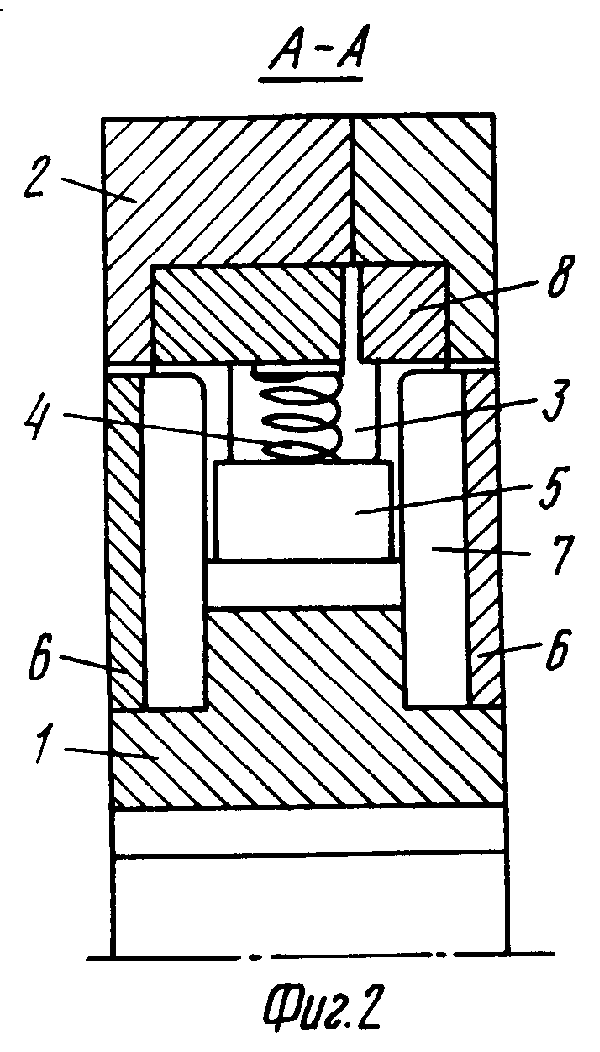
На фиг. 1 показан храповой механизм свободного хода; на фиг. 2 - разрез А-А на фиг. 1.
Храповой механизм свободного хода содержит храповое колесо 1 и обойму 2. В обойме установлены собачки 3 в виде пластин, имеющие возможность вращения вокруг своих осей и поджатые к храповому колесу 1 упругими элементами 4. На боковых гранях каждой собачки 3 выполнены два упора 5. Упор выполнен в форме сектора, ось которого совпадает с вершиной контактной поверхности собачки 3. На храповом колесе 1 закреплены два дисковых поводка 6, установленных по отношению к упоpам 5 с осевым зазором и выполненных в виде турбинных лопастных колес. Лопасти 7 турбинных колес ориентированы таким образом, чтобы при свободном ходе механизма свободного хода поток воздушно-масляной смеси подавался на поверхность собачки 3, обращенную к храповому колесу 1. В обойме 2 закреплены два кольцевых ограничителя 8.
Механизм работает следующим образом.
В период свободного хода дисковые поводки 6, вращаясь вместе с храповым колесом 1 против часовой стрелки относительно обоймы 2 с шарнирно установленными в ней собачками 3, поджатыми к храповому колесу упpугими элементами 4, подают поток воздушно-масляной смеси с помощью лопастей 7 турбинных лопастных колес 6 под поверхность собачки 3, обращенную к храповому колесу. При определенной скорости храпового колеса (турбинных лопастных колес) сила, возникающая в результате давления потока воздушно-масляной смеси на поверхность собачки 3, обращенную к храповому колесу, отрывает собачку 3 от храпового колеса, преодолевая силу упругости упругих элементов 4, и прижимает собачку упорами 5 к кольцевым ограничителям 8.
Тем самым обеспечивается постоянный минимальный зазор между зубьями собачек и храпового колеса. При уменьшении скорости вращения храпового колеса уменьшается давление потока. При определенной скорости храпового колеса (близкой к нулю) сила, возникающая в результате давления потока воздушно-масляной смеси, уменьшится настолько, что сила упругости упругих элементов 4 подожмет собачки 3 к храповому колесу и подготовит механизм к последующему включению. В тот момент, когда храповое колесо остановится, чтобы начать вращаться по часовой стрелке, зубья собачек 3 будут находиться на поверхности храпового колеса. Тем самым обеспечивается одновременное включение механизма свободного хода. (56) 1. Авторское свидетельство СССР N 1027448, кл. F 16 D 41/12, 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| Храповой механизм свободного хода | 1991 |
|
SU1784784A1 |
| Храповой механизм свободного хода | 1989 |
|
SU1723389A1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2008 |
|
RU2382249C2 |
| Храповой механизм свободного хода | 1981 |
|
SU1027448A1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2009 |
|
RU2398144C1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1997 |
|
RU2119601C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2016282C1 |
| Импульсный вариатор | 1982 |
|
SU1089334A2 |
| Инерционный трансформатор вращающего момента | 1984 |
|
SU1221423A1 |
| Автоматическая бесступенчатая передача | 1989 |
|
SU1670264A1 |
Использование: в импульсных бесступенчатых передачах, в частности в инерционных трансформаторах вращающегося момента. Сущность: храповой механизм свободного хода содержит храповое колесо 1 и обойму 2. В обойме 2 установлены собачки 3 в виде пластин, имеющие возможность вращения вокруг своих осей и поджатые к храповому колесу упругими элементами 4. На храповом колесе закреплены два дисковых поводка, установленных по отношению к упорам 5 с осевым зазором. Дисковые поводки выполнены в виде турбинных лопастных колес 6. Лопасти 7 турбинных колес ориентированы таким образом, чтобы при свободном ходе механизма свободного хода поток воздушно-масляной смеси подавался на поверхность собачки 3, обращенную к храповому колесу. В период свободного хода поток воздушно-масляной смеси с помощью лопастей подается под поверхность собачки 3, обращенную к храповому колесу, отрывая собачки от храпового колеса. Таким образом обеспечивается постоянный зазор между зубьями собачек и храпового колеса. При рабочем ходе механизма поток воздушно-масляной смеси отсутствует и собачки посредством сил упругости упругих элементов входят в зацепление с зубьями храпового колеса. 2 ил.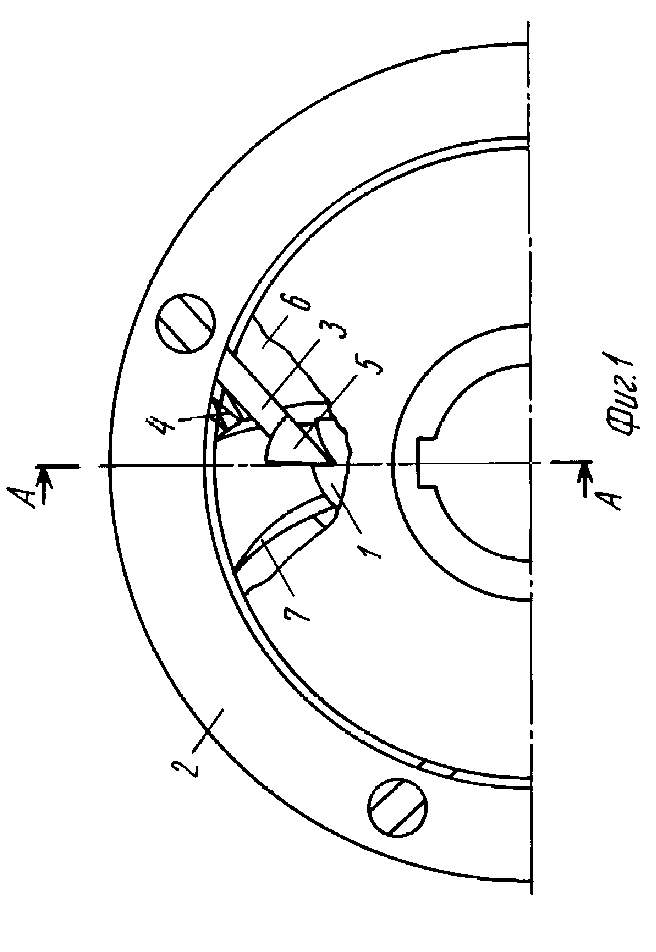
ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА, содержащий храповое колесо, обойму, установленные в ней в контакте с зубьями храпового колеса собачки, выполненные с упорами секторной формы, ось которых совпадает с вершиной контактной поверхности каждой собачки, расположенными на их боковых гранях, два кольцевых ограничителя, установленных концентрично храповому колесу и охватывающих упоры собачек, а также два дисковых поводка, установленных по обе стороны храпового колеса и связанных с ним в окружном направлении, отличающийся тем, что дисковые поводки выполнены в виде турбинных лопастных колес, установленных с осевым зазором относительно упоров собачек и с возможностью подачи направленного потока среды на поверхности собачек, обращенные к храповому колесу, собачки поджаты к храповому колесу упругими элементами, а кольцевые ограничители установлены в обойме.
