Изобретение относится к измерительной технике и может быть использовано для контроля угловых перемещений рабочих органов металлорежущих станков.
Известен датчик угла поворота вала, содержащий два П-образных кольцевых магнитопровода, установленных соосно и разделенных зазором, кольцевые магнитопроводы установлены торцами друг к другу, на одном из торцов первого магнитопровода установлен кольцевой постоянный магнит, а другой торец выполнен зубчатым, на одном торце второго кольцевого магнитопровода, сопряженным с зубчатым торцом первого кольцевого магнитопровода, установлены магниточувствительные элементы (МЧЭ), объединенные в группы, МЧЭ каждой из групп равномерно распределены по окружности, смещены относительно МЧЭ соседней группы на четверть зубчатого деления и соединены между собой последовательно, МЧЭ выполнены в виде матрицы, в которой магниторезисторы расположены на общей магнитомягкой подложке (авт. свид. СССР N 773426, кл. G 01 B 7/30, G 08 C 9/046 1980 г.).
Известный датчик отличается сложностью конструкции.
Наиболее близким по технической сущности к изобретению является датчик угловых перемещений, содержащий неподвижный магнитопровод с выступами, размещенные на них магниточувствительные элементы и установленный в зазоре между выступами магнитопровода ферромагнитный ротор с постоянным магнитом, намагниченным радиально и закрепленным на оси ротора, причем постоянный магнит выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда и имеет продольное сечение в виде равнобедренной трапеции, меньшее основание которой расположено в области участка спирали Архимеда с наименьшим радиусом кривизны (авт. свид. СССР N 1315790, кл. G 01 B 7/30, 1987 г., прототип).
Данный датчик позволяет измерять угловое перемещение только одного объекта.
Результатом изобретения является расширение кинематических возможностей датчика путем увеличения количества одновременно контролируемых объектов и обеспечение селективного их выбора.
Данный результат достигается тем, что датчик угловых перемещений, содержащий неподвижный магнитопровод с выступами, размещенные на них магниточувствительные элементы и установленный в зазоре между выступами магнитопровода ферромагнитный ротор с постоянным магнитом, намагниченным радиально и закрепленным на оси ротора, причем постоянный магнит выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда и имеет продольное сечение в виде равнобедренной трапеции, меньшее основание которой расположено в области участка спирали Архимеда с наименьшим радиусом кривизны, датчик дополнен семью дополнительными ферромагнитными роторами с закрепленными на них постоянными магнитами, и устройством селективного выбора объектов контроля, выполненным в виде программного коммутатора (переключателя), к которому подключены цепи питания или измерения магниточувствительных элементов, неподвижный магнитопровод выполнен с расположенными попарно в двух взаимоперпендикулярных плоскостях выступами, образующими Ж-образную форму магнитопровода в каждой плоскости, а магниточувствительные элементы выполнены в виде магниторезисторов (авт. свид. СССР N 1315790, кл. G 01 B 7/30, 1987 г., прототип).
Такое выполнение датчика угловых перемещений позволяет увеличить количество одновременно контролируемых, селективно выбранных объектов и осуществить суммирование их угловых перемещений без остановки других объектов, суммирование перемещений которых не востребовано, что зачастую бывает необходимо при проведении научных экспериментов.
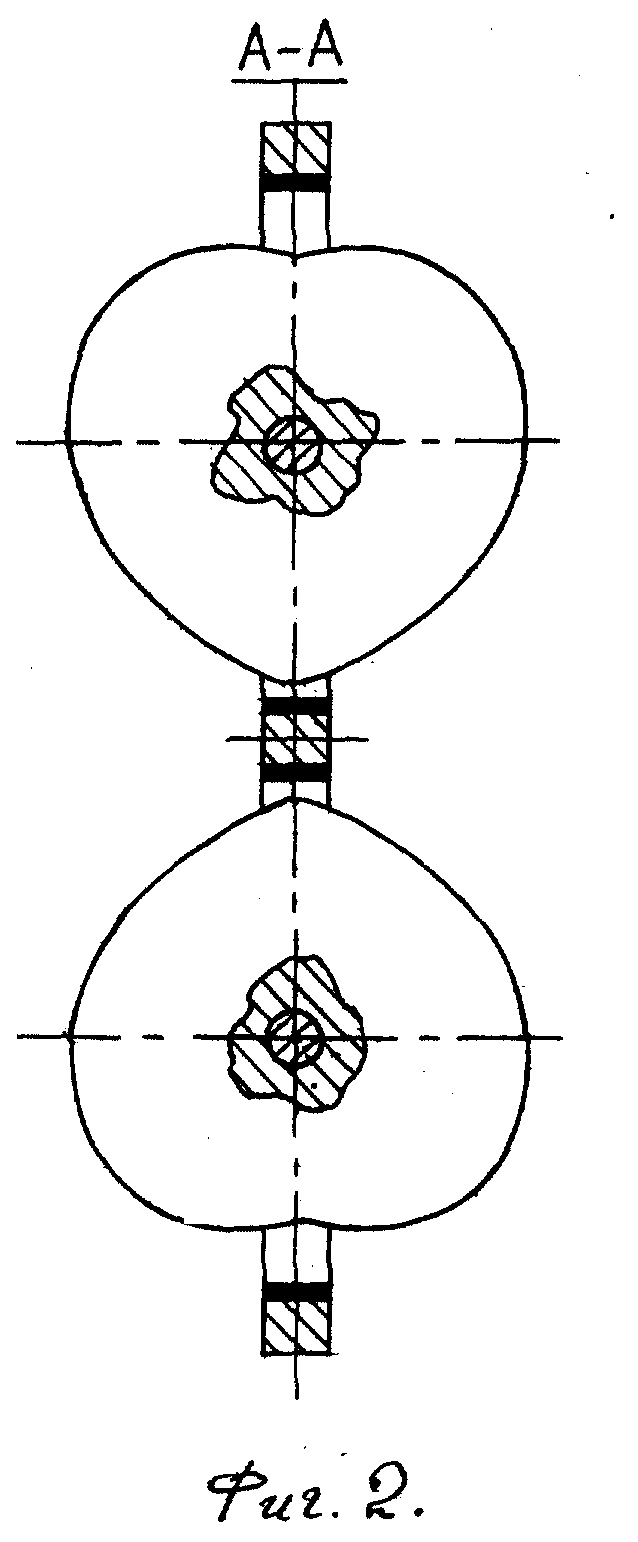
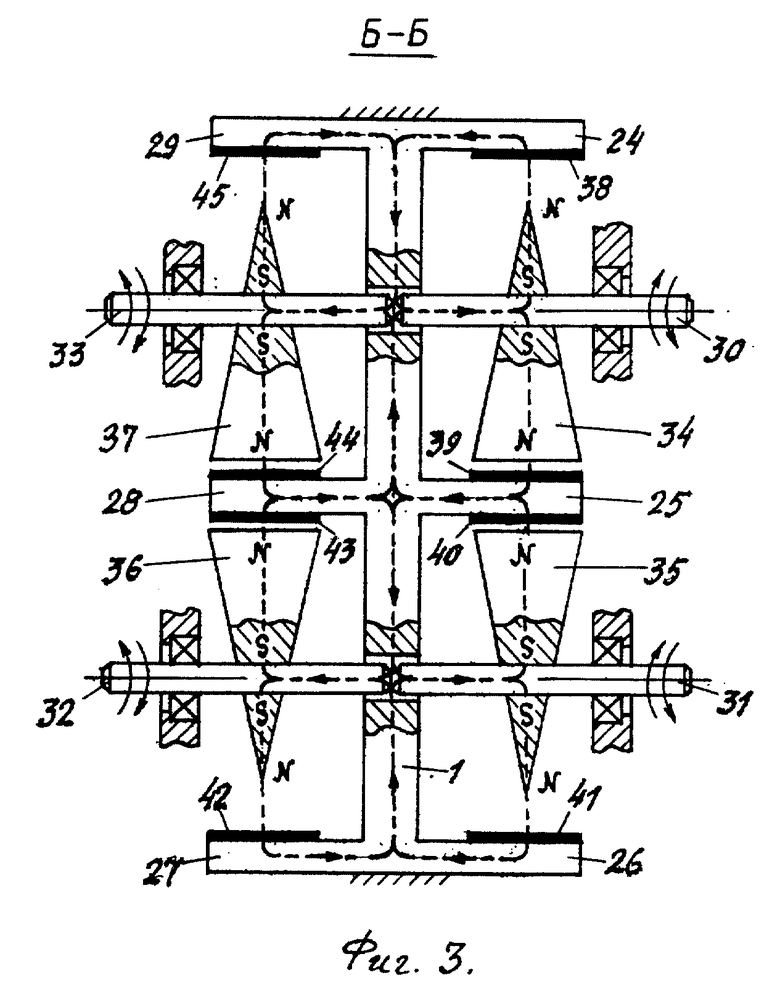
На фиг. 1 схематично изображен предлагаемый датчик, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Датчик угловых перемещений содержит неподвижный магнитопровод 1, на выступах 2 и 3 которого размещены МЧЭ 4 и 5, например магниторезисторы, ферромагнитный ротор 6 с закрепленным на нем постоянным магнитом 7.
Магнитопровод 1 снабжен дополнительными выступами 8-11 и тремя дополнительными роторами 12-14 с закрепленными на них постоянными магнитами 15-17 соответственно.
На противоположной стороне выступа 3 магнитопровода 1 размещен дополнительный МЧЭ 18, а на дополнительных выступах 8-11 магнитопровода 1 - дополнительные МЧЭ 19-22. В варианте исполнения неподвижный магнитопровод 1 снабжен расположенными в плоскости, перпендикулярной плоскости магнитопровода 1, тремя парами дополнительных выступов 24-29, двумя парами дополнительных ферромагнитных роторов 30-33 с закрепленными на них аналогичными магнитами 34-37 и четырьмя парами дополнительных МЧЭ, например, магниторезисторов 38-45, что позволяет вдвое увеличить количество одновременно контролируемых объектов. Основные 4 и 5 и дополнительные 18-23 и 38-45 МЧЭ соединены по мостовой схеме измерения.
В процессе измерения ферромагнитные роторы 6, 12-14 и 30-33 кинематически связываются с объектами контроля (не показаны).
Основной 7 и дополнительные 15-17 и 34-37 постоянные магниты намагничены радиально, установлены на оси своих роторов 6, 12-14 и 30-33 соответственно и выполнены с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда и имеют продольное сечение в виде равнобедренной трапеции, меньшее основание которой расположено в области участков спирали Архимеда с наименьшим радиусом кривизны.
Датчик угловых перемещений работает следующим образом.
При контроле одного из объектов незадействованные роторы находятся в нейтральном положении (как показано на фиг. 1).
При повороте, например, ротора 6 изменяются величины зазоров между постоянным магнитом 7 ротора 6 и МЧЭ 4 и 5 датчика. Величина зазора между одним из МЧЭ, например, 4 и магнитом 7 уменьшается, а его площадь увеличивается, а между другим МЧЭ, например, 5 и магнитом 7 зазор увеличивается, а его площадь уменьшается, вследствие чего изменяется магнитная проводимость этих зазоров в области размещения МЧЭ во взаимно противоположных направлениях. Изменение проводимости воздушных зазоров, а следовательно, и магнитных потоков, проходящих через МЧЭ 4 и 5, вызывает изменение сигналов на выходе МЧЭ, например изменение сопротивления магниторезисторов, происходящее линейно в зависимости от угла поворота ротора 6.
При контроле нескольких объектов, выбираемых с помощью устройства селективного выбора (не показан), одновременно поворачиваются и кинематически связанные с объектами роторы (например, 6 и 12), в результате чего одновременно аналогично изменяются величины и площади зазоров между магнитами 7 и 15 и соответствующими МЧЭ 4, 5, 18 и 19. Также линейно изменяются и проводимости этих зазоров, а на выходе мостовой схемы измерения появляется сигнал, пропорциональный арифметической сумме углов поворота роторов 6 и 12, независимо от направления их вращения.
Данный датчик может быть использован при проведении экспериментальных работ, когда необходимо осуществлять суммирование угловых перемещений ряда объектов без остановки других контролируемых объектов, перемещение которых измерять не требуется.
Благодаря особенностям конструктивного выполнения постоянных магнитов обеспечивается увеличение градиента магнитной проводимости и, следовательно, более интенсивное изменение сигнала на выходе датчика, что повышает его чувствительность и точность измерения угла поворота.
Положительный эффект изобретения состоит в возможности селективного выбора объектов контроля и одновременного измерения и суммирования угловых перемещений нескольких объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| Датчик угловых перемещений Е.П.Абрамцева | 1985 |
|
SU1315790A1 |
| Датчик угловых перемещений | 1989 |
|
SU1620815A1 |
| Механизм преобразования вращательного движения в сложное | 1989 |
|
SU1657804A1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ВАЛА | 1997 |
|
RU2145053C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1997 |
|
RU2127866C1 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |
| МАГНИТОМОДУЛЯЦИОННЫЙ ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2023235C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ДВУХ ВАЛОВ | 1991 |
|
RU2010156C1 |
Изобретение относится к измерительной технике и может быть использовано для контроля угловых перемещений рабочих органов металлорежущих станков. Датчик имеет неподвижный магнитопровод с выступами. Выступы расположены на магнитопроводе попарно в двух взаимоперпендикулярных плоскостях. Магнитопровод вместе с выступами в этих плоскостях имеет Ж-образную форму. На выступах магнитопровода располагаются магниточувствительные элементы. Между выступами магнитопровода расположены восемь ферромагнитных роторов с постоянными магнитами. Магниты имеют поперечное сечение, ограниченное двумя симметрично расположенными участками спирали Архимеда. В продольном сечении магниты имеют форму равнобокой трапеции, меньшее основание которой расположено в области участка спирали Архимеда с наименьшим радиусом кривизны. Благодаря конструктивным особенностям постоянных магнитов повышается чувствительность датчика. Датчик предоставляет возможность селективного выбора объектов контроля и суммирования угловых перемещений нескольких объектов. 1 з.п. ф-лы, 3 ил.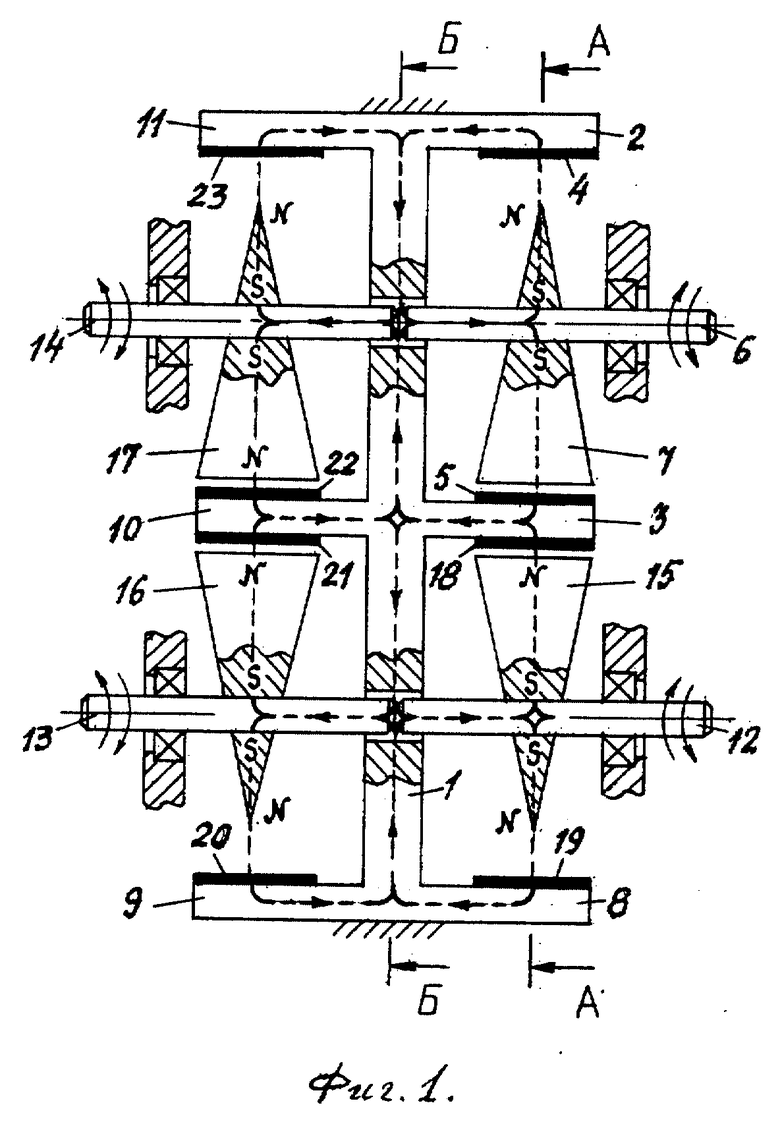
| Датчик угловых перемещений Е.П.Абрамцева | 1985 |
|
SU1315790A1 |
| Датчик угловых перемещений | 1989 |
|
SU1620815A1 |
| DE 2924094 A1, 08.01.81 | |||
| СХЕМА ЗАЩИТЫ ИНДУКЦИОННЫХ ЭЛЕКТРОСЧЕТЧИКОВ | 2013 |
|
RU2521163C1 |
