Изобретение относится к измерительной технике, может быть использовано в машиностроении и приборостроении для измерения толщины цилиндрических деталей.
Известно устройство для измерения толщины деталей, преимущественно цилиндрических, используемое в машиностроении и приборостроении. Устройство содержит основание, расположенные на нем транспортирующий блок и измеритель с арретирующим узлом, выполненным с пальцем, подпружиненным относительно измерителя, и связанным с основанием упругой связью, привод их перемещения и захват для детали, кинематически связанный с приводом, а на измерителе расположен регулируемый упор, взаимодействующий с транспортирующим блоком.
Недостатком устройства являются его узкие технологические возможности, обусловленные невозможностью измерения косины детали, являющейся разностью наибольшей и наименьшей толщин края измеряемой детали.
Целью изобретения является расширение технологических возможностей путем обеспечения измерения косины.
Цель достигается тем, что в устройстве для измерения толщины деталей губки захвата снабжены поворотными роликами, по крайней мере один из которых кинематически связан с приводом, причем кинематическая связь по крайней мере одного из роликов с приводом осуществляется посредством расположенного на измерителе редуктора, одна из осей которого кинематически связана с осью поворотного ролика, а входная ось соединена с подпружиненным поворотным штоком, выполненным с возможностью взаимодействия с расположенным на основании упором.
Снабжение губок захвата поворотными роликами позволяет обеспечить возможность вращения измеряемой детали после ее зажима, а выполнение по крайней мере одного из них кинематически связанным с приводом позволяет обеспечить вращение измеряемой детали во время перемещения измерителя вместе с захватом относительно основания, т.е. позволяет обеспечить перемещение измерительного органа измерителя в заданном сечении детали относительно поверхности детали, что позволяет обеспечить измерение косины детали в заданном ее сечении. Расположение на измерителе редуктора, одна из осей которого кинематически связана с осью поворотного ролика, а входная ось соединена с подпружиненным поворотным штоком, выполненным с возможностью взаимодействия с расположенным на основании упором позволяет достаточно просто реализовать кинематическую связь по крайней мере одного из роликов с приводом. При этом возможность кинематической связи с осью поворотного ролика одной из нескольких осей позволяет реализовать необходимое в конкретном случае передаточное отношение редуктора n, следовательно, конкретное значение скорости поворота губок захвата, т.е. обеспечить возможность производить измерение косины линз различных диаметров в заданном сечении.
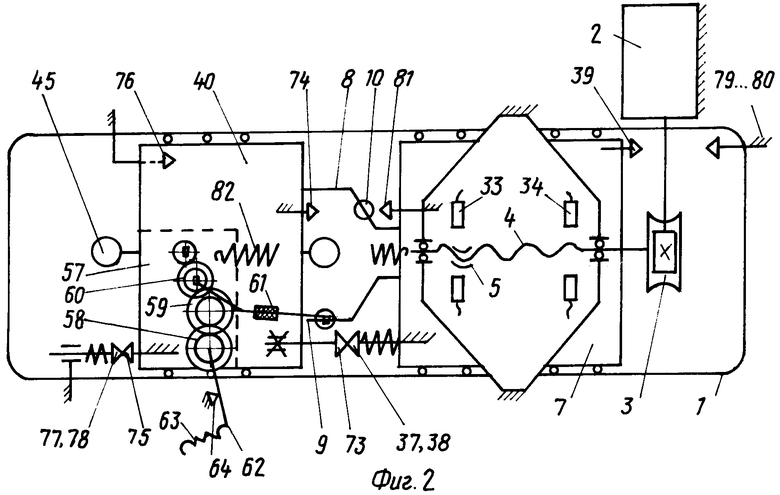
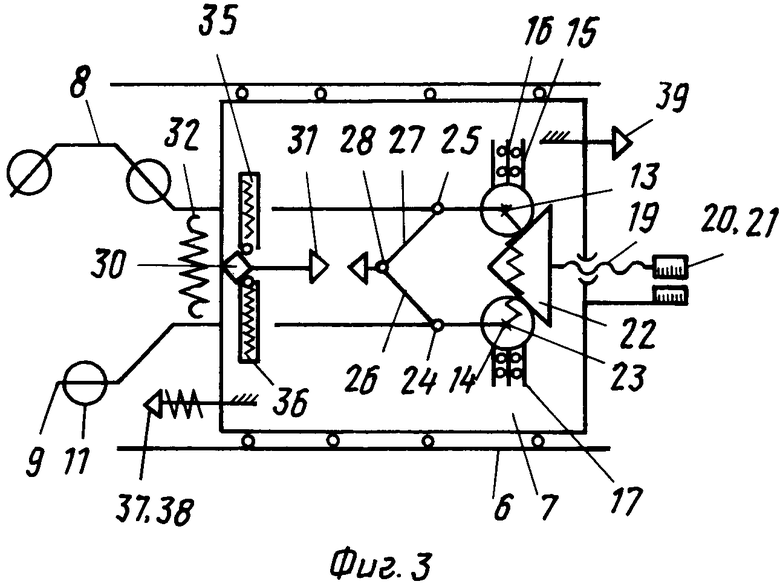
На фиг. 1 показана кинематическая схема устройства; на фиг. 2 - вид на устройство сверху; на фиг. 3 - вид сверху на захват устройства; на фиг. 4 - разрез А-А на фиг. 2; на фиг. 5 - вид сверху на расположенный на измерителе редуктор.
Устройство содержит расположенные на основании 1 двигатель 2, червячную передачу 3, ходовой винт 4, гайку 5. На основании 1 расположены направляющие 6, на каретке 7 которых расположен захват, выполненный в виде поворотных губок 8 и 9 с поворотными роликами 10, 11, 12 и осями поворота 13, 14 губок 8 и 9, направляющих 15, в которых установлены каретки 16, 17, содержащие оси 13, 14 поворотных губок 8 и 9. В корпусе каретки 7 установлена гайка 18 винтовой передачи, винт 19 которой связан с ручкой 20, шкалой 21 и клином 22, взаимодействующим с каретками 16, 17, связанных пружиной 23. На губках 8 и 9 расположены оси 24, 25 поворота рычагов 26, 27, связанных между собой шарниром 28 с опорной площадкой (не показана). Гайка 5 закреплена на штоке 29, соединенном с замком 30 и пяткой 31, расположенной в плоскости опорной площадки шарнира 28. Губки 8 и 9 связаны между собой пружиной 32. На основании 1 расположены микропереключатели 33, 34. На каретке 7 расположены фиксаторы 35, 36, упор 37 с пружиной 38 и упор 39. Измеритель 40 расположен на каретке 41 в направляющих 6 и содержит измерительные рычаги 42, 43, связанные с измерителем 40 через шарнир 44. На одном из рычагов 42неподвижно закреплен преобразователь 45. На соответствующем конце рычага 43 расположена пятка 46, связанная дифференциальным винтовым механизмом 47 с рукояткой 48. На противоположном конце рычагов 42, 43 размещены измерительные наконечники 49, 50 с возможностью перемещения относительно рычагов 42, 43. Силовое замыкание рычагов 42, 43 производится пружинами 51, 52 с регулировочными винтами 53, 54 и гайками 55, 56. На измерителе 40 расположен редуктор 57, содержащий зубчатые передачи 58, 59, 60, оси колес которых имеют возможность быть связанными с осью ролика 10 гибкой связью 61, а выходная ось соединена с поворотным штоком 62, подпружиненным относительно редуктора пружиной 63 и выполненным с возможностью взаимодействия с расположенным на основании 1 упором 64. Арретирующий узел содержит кулачок 65, расположенный на оси 66 и связанный с рычагами 42, 43 контактными роликами 67, 68, оси 69, 70 которых закреплены на рычагах 42, 43. На оси 66 неподвижно закреплен палец 71, подпружиненный относительно измерителя 40 пружиной 72. На каретке расположены регулируемый упор 73, упоры 74 и 75. На основании 1 расположен кулачок 76, упор 77 с пружиной 78, а также регулируемый упор 79 с рукояткой 80 и упор 81. Измеритель 40 связан с основанием 1 пружиной 82.
Работает устройство следующим образом.
Измеряемая деталь помещается в пространство между губками 8 и 9, включается двигатель 2. Вращательное движение от двигателя 2 передается через червячную передачу 3 на ходовой винт 4, гайка 5 перемещается по винту 4. Пятка 31 перемещается с гайкой 5, перестает нажимать на опорную площадку шарнира 28, вследствие чего пружина 32 через губки 8 и 9 и поворотные ролики 10, 11, 12 зажимает деталь. Дальнейшее перемещение гайки 5 приводит к фиксации замка 30 в фиксаторах 35, 36. Захват на каретке перемещается в направляющих 6 к измерителю 40. После соприкосновения упоров 37 каретки 7 и 73 измерителя 40 каретка 7 и измеритель 40 движутся одновременно по направляющим 6. Подпружиненный пружиной 72 палец 71, взаимодействуя с кулачком 76, поворачивается на оси 66 кулачка 65 и разворачивает рычаги 42, 43 в положение измерения, при этом палец 71 скользит по боковой поверхности кулачка 76. Поворотный шток 62 взаимодействует с упором 64, расположенным на основании 1, при этом движение передается на одну из осей колес передач 58, 59, 60, связанных гибкой связью 61 с осью ролика 10, на ролик 10, вращающий измеряемую деталь, при этом измерительные наконечники 49, 50 перемещаются по поверхности измеряемой детали в заданном сечении. Производится измерение с помощью преобразователя 45. После этого гайка 5, взаимодействуя с микропереключателем 33, выключает двигатель 2. При этом упор 75 контактирует за счет пружины 78 с упором 77 и останавливает движение, двигатель 2 реверсируется, движение передается через червячную передачу 3 ходовому винту 4 и гайке 5 со штоком 29, который начинает передвигать каретку транспортирующего блока вместе с захватом в исходное положение, при этом остаются замкнутыми фиксаторы 35, 36. Одновременно пружина 82 обеспечивает движение измерителя 40 в исходное положение, пружина 63 возвращает поворотный шток 62 в исходное положение, пружина 72 обеспечивает разворот пальца 71 вместе с осью 66 и кулачком 65, вследствие чего контактные ролики 67, 68 разарретируют рычаги 42, 43. Каретка 41 после соприкосновения упоров 74 и 81 останавливается в исходном положении, при этом каретка 7 продолжает движение в направляющих 6. После соприкосновения упоров 39 и 79 каретка 7 останавливается в исходном положении. При дальнейшем движении гайки 5 происходит расфиксация замка 30 в фиксаторах 35, 36; пятка 31 штока 29 нажимает на опорную площадку шарнира 28, вследствие чего рычаги 26, 27 разводятся, что приводит к разжатию губок 8 и 9 захвата с закрепленными на них роликами 10, 11, 12 и освобождению детали, затем гайка 5 взаимодействует с микровыключателем 34 и выключает двигатель 2. Значение диаметра в пределах диапазона работы губок отсчитывается по шкале 21 при перемещении клина 22. При необходимости измерения детали в любом другом сечении производится регулировка упора 37.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2200940C2 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ КОНТРОЛЯ ГЕОМЕТРИЧЕСКОГО РАСПОЛОЖЕНИЯ ЛИНЗ И ИНТЕРФЕРЕНЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2078305C1 |
| Устройство для склеивания оптических деталей | 1989 |
|
SU1680655A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2112227C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СФЕРОМЕТР | 1992 |
|
RU2037768C1 |
| ЮСТИРОВОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2029325C1 |
| СПОСОБ УПРАВЛЕНИЯ ОПТИЧЕСКОЙ СИСТЕМОЙ И УПРАВЛЯЕМАЯ ОПТИЧЕСКАЯ СИСТЕМА | 1991 |
|
RU2012911C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2115904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ КЛИНОВИДНЫХ ОБРАЗЦОВ | 1989 |
|
RU2032166C1 |
| Контактный сферометр | 1990 |
|
SU1733912A1 |


Изобретение относится к измерительной технике и может быть использовано для измерения толщины цилиндрических деталей. Цель изобретения - повышение удобства эксплуатации. Цель достигается тем, что на губках закреплены поворотные ролики 10, 11, 12 по крайней мере один из них связан с измерителем посредством редуктора 57, одна из осей которого связана с осью ролика посредством гибкой связи 61, подпружиненного пружиной 63 штока 62, взаимодействующего с упором 64. 1 з.п. ф-лы, 5 ил.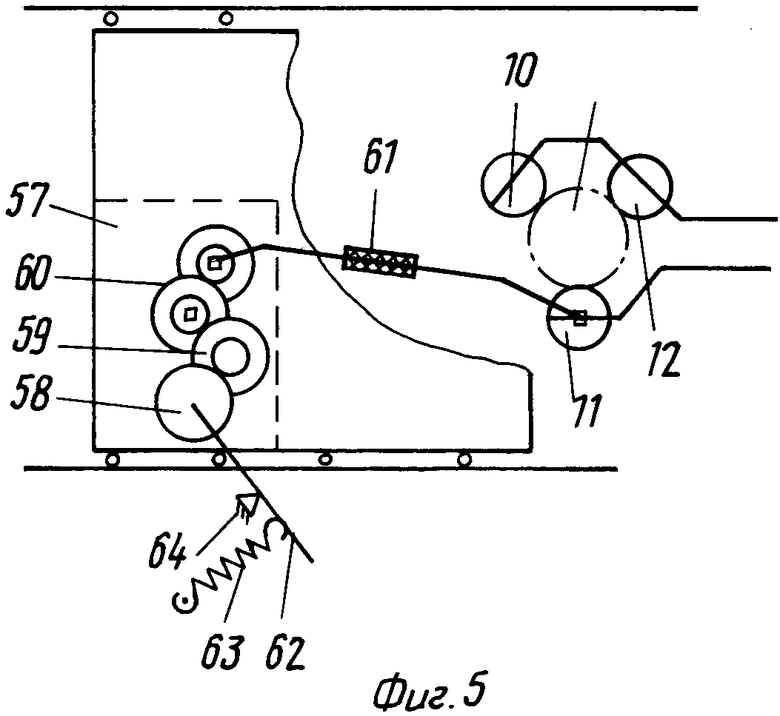
| Авторское свидетельство СССР N 1590933, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
