Изобретение относится к машиностроению и может быть использовано для определения осевых моментов инерции, тензоров инерции и центров масс тел на платформах, вращающихся вокруг произвольной оси с существенным или малым трением в ограниченных пределах под действием известного скачкообразно изменяющегося крутящего момента.
Тензор инерции тела определяется через шесть осевых моментов инерции относительно пучка осей.
Известен способ определения момента инерции тела, при котором тело закрепляют на платформе с горизонтальной осью вращения и известным дисбалансом, сообщают ей свободное вращательное движение с проворотом и по измеренным угловым скоростям аналитически определяют момент инерции тела (авт. св. СССР N 1100505, МКИ G 01 M 1/10, 18.03.83).
Недостатком известного способа является низкая точность и производительность, обусловленная неточным учетом силы трения и необходимостью измерять параметры на полном повороте платформы вокруг оси в условиях трения.
Известно устройство для определения момента инерции тела, реализующее способ по авт. св. N 1100505, содержащее платформу с горизонтальной осью вращения, с контейнером для закрепления тела, с дисбалансом - маятниковым силовым механизмом, состоящим из двух дебалансов, создающих известный крутящий момент.
К недостаткам относится невысокая точность и производительность данного устройства.
Наиболее близким к предлагаемому изобретению относится способ определения момента инерции тела [1], при котором тело устанавливают на платформу с горизонтальной осью вращения, сообщают ей крутильные колебания при действии маятникового дисбалансного механизма, измеряют на протяжении 3/4 периода 5 мгновенных угловых скоростей в трех симметричных относительно вертикали угловых положениях в угловой зоне измерения, затем, изменив конфигурацию механизма с целью изменения крутящего гравитационного момента, выполняют повторные 5 измерений, по которым аналитически определяют момент инерции тела.
Однако известный способ предназначен только для применения на платформах с горизонтальной осью и малым трением, имеет низкую производительность и точность, обусловленную следующим:
1) Наблюдаются свободные затухающие маятниковые колебания, которые содержат бесполезные угловые пробеги вблизи положения равновесия системы, где угловое ускорение близко к нулю и поэтому система нечувствительна к моменту инерции, а также бесполезно тратится время на неизбежные, сравнительно медленные выбеги из зоны измерений, остановку и возврат в нее.
Кроме того, производятся два опыта, разделенные остановкой и перенастройкой, на каждом из них наблюдается 3/4 полного колебания, на что затрачивается время, снижается производительность.
2) Малое количество предусмотренных измерений угловой скорости на протяжении испытаний не позволяет достаточно точно учитывать влияние трения, причем погрешности тем большие, чем больше трение.
Наиболее близким к предлагаемому изобретению является устройство для определения тензора инерции изделия [2], содержащее основание с опорами, размещенный в последних посредством цапф кольцевой подвес, состоящий из наружного кольца (платформы с горизонтальной осью вращения), внутреннего кольца и контейнера с крепежными винтами (захвата), устанавливающий тело в шести новых положениях по отношению к оси вращения, дисбалансного механизма с неизменным моментом инерции и регулируемым положением центра масс, соединенного муфтой с валом наружного кольца.
Недостатком данного устройства является недостаточная точность и производительность.
Решается задача повышения точности и производительности и расширения области применения способа и устройства для определения тензора инерции тела за счет существенного изменения типа наблюдаемого движения и увеличения количества измерений, изменения расчетных формул.
Сущность способа.
Платформу с наклонным или горизонтальным валом, установленным посредством цапф в подшипниковой опоре с малым или большим трением, снабжают датчиком угла и угловой скорости (например, существующим оптоэлектронным датчиком), закрепляют на ней испытуемое тело, после чего обнуляют датчик угла в положении равновесия этой системы и назначают симметричную зону измерений, в которой выбираются конечное множество симметричных относительно нуля угловых положений.
Систему выводят из зоны измерений и отпускают свободно или с толчком, прикладывая при этом крутящий разгонно-тормозной момент. Последний должен быть известным и должен обеспечить несимметричное разгонно-тормозное вращение через измерительную зону, состоящее из этапа разгона с неравным нулю ускорением на половине измерительной зоны, резко переходящим в этап торможения на другой половине измерительной зоны с существенно другими угловыми скоростями, удовлетворяющими определенному условию, обеспечивающему хорошую обусловленность расчетных формул. По множеству измеренных мгновенных угловых скоростей на симметричных угловых положениях аналитически определяется момент инерции тела относительно оси вращения. Затем пять раз изменяется угловое положение тела на платформе, в результате определяется еще пять осевых моментов инерции для осей, сходящихся в пучок, которые определяют тензор инерции тела в определенной его точке.
В отличие от известного способа предлагаемый способ основан на измерениях другого вида движения, где исключен обратный отмах, рассматривается однонаправленное движение, в котором сверх того отсутствует участок квазиравномерного движения, причем движение является динамически существенно несимметричным.
Кроме того, исключен повторный опыт с перенастроенным дисбалансом, т.е. взамен двух колебаний, разделенных перенастройкой устройства, рассматривается одно разгонно-тормозное динамически несимметричное движение, причем ось платформы может быть негоризонтальной.
Этим достигается повышение производительности, точности, расширение области применения.
На фиг. 1 схематично изображена система, состоящая из платформы 4 с геометрической осью вращения C, с валом (кружок вокруг C), с закрепленным на ней телом (не показано), с датчиком угла поворота и угловой скорости, показанным в виде стрелки на симметричной шкале с (2n + 3) делениями с положением равновесия системы CO, с выделенной угловой зоной O1CO2.
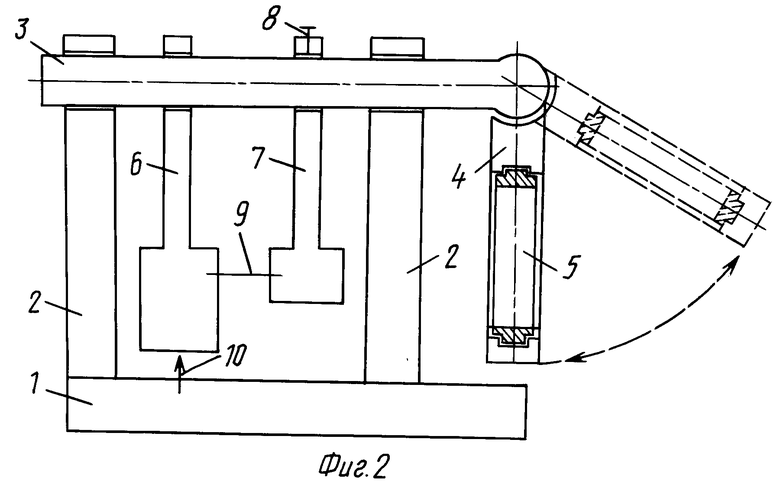
На фиг. 2 схематично изображено устройство (вид спереди) для осуществления способа, позволяющего определить шесть осевых моментов инерции тела относительно пучка осей икосаэдра, тензор инерции, положение центра масс тела, используя для этого множество значений угловой скорости на одном несимметричном разгонно-тормозном размахе - полуколебании с резким переключением на торможение.
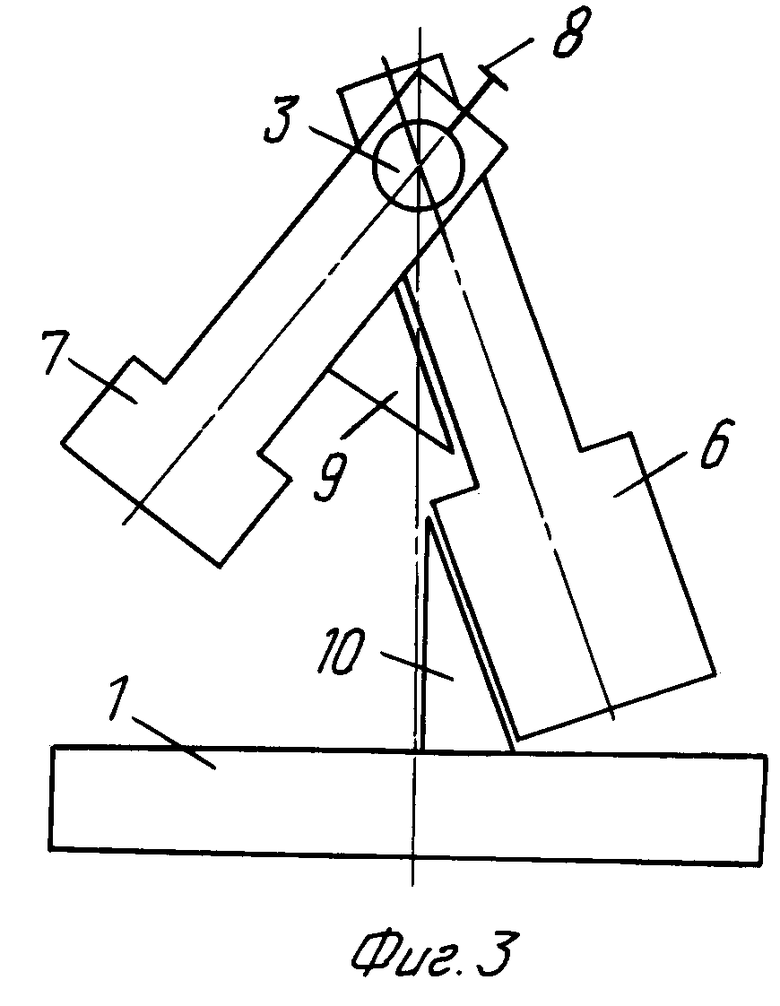
На фиг. 3 изображен силовой дисбалансный механизм (вид сбоку), создающий на валу крутящий момент с мгновенным разрывным переключением с разгона на торможение. Отметим, что ось вращения устройства негоризонтальна в случае установления его на наклонной площадке.
Устройство содержит основание 1, на котором посредством стоек 2 установлена маятниковая система, выполненная в виде вала 3 в шарикоподшипниковых опорах, кольцевой платформы 4 с возможностью фиксации ее на валу в двух показанных угловых положениях, кольцевого захвата 5 для размещения тела с возможностью поворота в плоскости кольцевой платформы 4 и фиксации в пяти положениях, дисбалансного механизма, состоящего из двух дебалансов (маятников) 6 и 7 с шарикоподшипниковыми опорами на вал с возможностью фиксации на валу дебаланса 7 фиксатором 8 и ограничения вращения дебаланса 6 подвижным стопором 9 и неподвижным стопором 10, расположенным на основании (см. фиг. 3).
Возможно размещение на валу ротационного оптико-электронного датчика (не показан), связанного с компьютером через плату сопряжения (авторы использовали датчик IPC III).
Устройство для определения момента и тензора инерции работает следующим образом.
Дисбаланс с выключенным фиксатором 8 и включенными стопорами 9 и 10 устанавливается в своем положении равновесия, показанном на фиг. 3, а система тело-платформа занимает свое положение равновесия. После этого дебаланс 7 жестко закрепляется на валу фиксатором 8, датчик угла обнуляется, что соответствует установке изображающей стрелки в нулевом положении на шкале, и фиксируется на валу. Затем система поворотом против часовой стрелки (фиг. 1) переводится в зону начального выбега и отпускается свободно или с толчком к положению равновесия, после прохождения всех делений шкалы система стопорится в зоне конечного выбега. В результате определяется множество значений угловой скорости вала, по которым расчетом определяется момент инерции тела относительно оси вращения или любой другой параллельной ей оси, а также определяется расстояние до центра масс тела от оси вращения. Далее платформа переводится во второе положение, показанное пунктиром на фиг. 2, причем кольцо 5 с телом последовательно фиксируется на платформе в пяти угловых положениях и последовательно определяется еще пять осевых моментов инерции. В результате находятся шесть моментов инерции относительно пучка осей икосаэдра, по которым определяется тензор инерции тела и положение центра масс тела.
Изобретение относится к машиностроению. Способ определения осевого момента инерции тела и устройство для его осуществления могут быть использованы для определения осевых моментов инерции, тензоров инерции и центров масс тел на платформах, вращающихся вокруг произвольной оси. Платформе с валом, установленным в подшипниковой опоре, с закрепленным на ней телом, сообщают колебания вокруг оси в допустимых угловых пределах, содержащие этапы разгона и торможения. Измеряют мгновенные угловые скорости вращения в определенных положениях угловой зоны измерений, по которым аналитически определяют момент инерции. Платформе сообщают одно динамически несимметричное разгонно-тормозное вращение с резким переходом от разгона к торможению. Устройство содержит основание, кольцевую платформу с валом, кольцевой контейнер, установленный с возможностью фиксации его в шести угловых положениях относительно оси вала, дисбалансный механизм, состоящий из двух опирающихся на вал дебалансов с возможностью фиксирования на валу одного на них. Платформа состоит из одного кольца с возможностью поворота вокруг оси, установленной вне его на валу платформы: Способ и устройство позволяют повысить точность и производительность измерений. 2 н.п.ф-лы. 3 ил.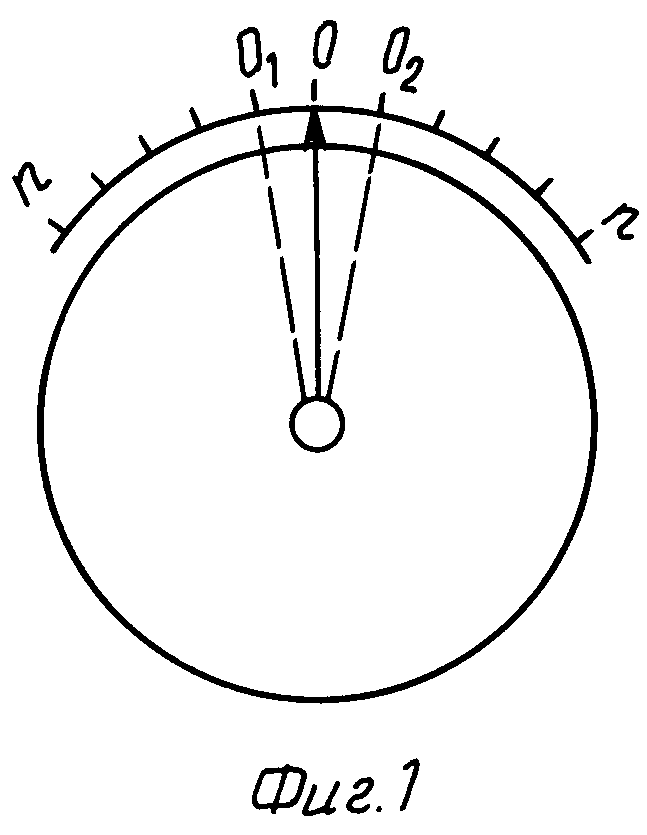
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство N 1415090, G 01 M 1/10, 1988 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство N 1717979, G 01 M 1/10, 1992. | |||
