Изобретение относится к радиолокационной измерительной технике и может быть применено в системах посадки летательных аппаратов или при измерении скорости и направления ветра в недосягаемых (например, зараженных) районах.
Известен способ дистанционного определения скорости в направлении ветра, который включает следующие основные операции: размещают в интересующей области пространства отражатели и обеспечивают их перемещение под действием ветра и пропорционально его скорости; облучают отражатели когеретным электромагнитным сигналом и принимают сигнал, отраженный от них, имеющий доплеровский сдвиг частоты, пропорциональный скорости ветра; измеряют доплеровский сдвиг частоты и вычисляют по нему скорость ветра в радиальном направлении; измеряют истинный пеленг отражателя и повторяют указанные операции с других рекурсов приема, после чего вычисляют скорость и направление ветра.
Прототипу присущи следующие недостатки: в нем использовались дипольные отражатели, которые под действием силы тяжести оседали на подстилающую поверхность, это приводит к тому, что измерения (если не вносить отражатели снова) становятся не постоянными или неэкономичными (если производить постоянный расход отражателей и обеспечить этим постоянность измерений); могут быть проведены ложные измерения, если в интересующей области есть другие движущиеся не под действием ветра объекты.
Целью изобретения является: обеспечение постоянности измерений (за счет постоянной модуляции отражающегося сигнала) с одновременной экономией расхода отражателей и повышение точности измерения путем селекции ложных отражателей.
Предложенный способ заключается в следующем: в интересующую область пространства помещают неоседающий отражатель, способный модулировать отражающийся сигнал под действием ветра не только по фазе (доплеровский сдвиг), но и по амплитуде, так чтобы период амплитудной модуляции, как и доплеровский сдвиг, был пропорционален скорости ветра, доплеровский сдвиг зависел и от косинуса угла между линией визирования и ожидаемым ее положением, отклоненным от направления ветра на некоторый заведомо известный угол βв горизонтальной плоскости, и глубина амплитудной модуляции сигнала имела максимальное значение при совпадении линии визирования с ожидаемым ее положением. Эта операция выполняется путем введения в интересующую область пространства отражателя-модулятора, представляющего собой флажок и безынерционную систему уголковых отражателей состоящую из симметрично соединенных по оси вращения двух крестовин и установленных на их концах уголковых отражателей, обращенных раскрывом перпендикулярно плечам крепления по часовой или против часовой стрелки в плоскости крестовин. При этом в результате взаимодействия флажка и системы уголковых отражателей с ветром флажок поворачивает систему уголковых отражателей вокруг вертикальной оси и стабилизирует плоскость их вращения в вертикальной плоскости действия ветра, а система уголковых отражателей вращения вокруг горизонтальной оси пропорционально скорости ветра.
При приеме измеряют глубину амплитудной модуляций принятого сигнала: при осуществлении измерений с разных ракурсов приема сигнала от отражателя сравнивают измеренные по доплеровскому сдвигу скорости ветра и определяют наибольшую из них и, если для ее ракурса глубина амплитудной модуляции принятого сигнала также максимальна, выбирают соответствующий им истинный пеленг отражателя, если нет, то повторяют указанные операции, после чего по выбранному пеленгу и заданному углу между ожидаемым положением линии визирования отражателя и направлением ветра определяют направление ветра относительно северного направления географического меридиана.
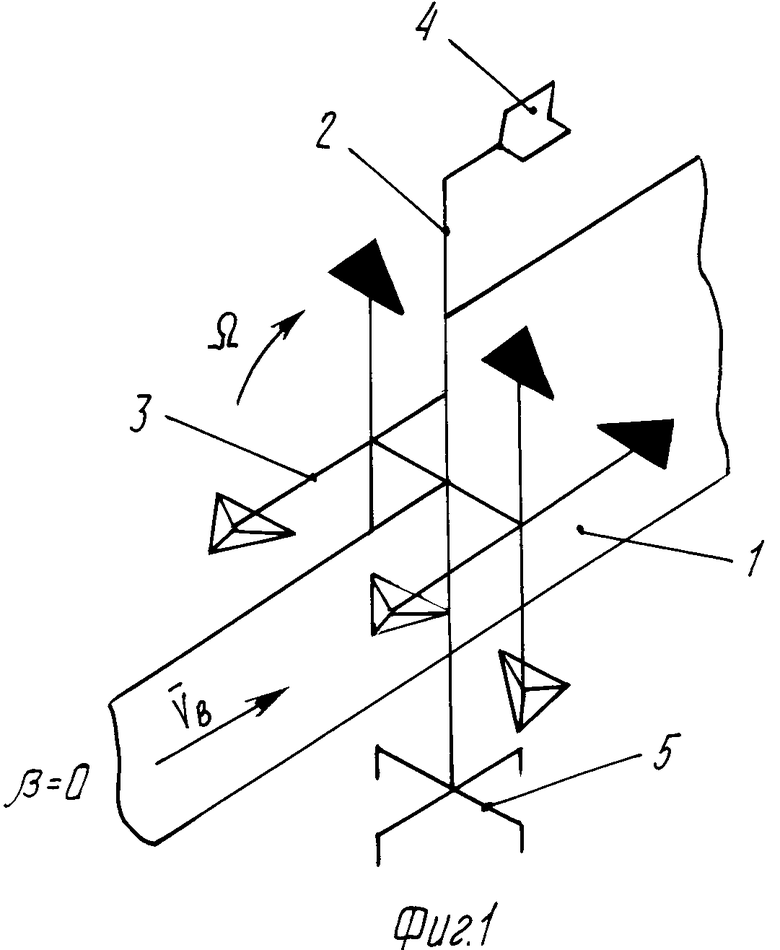
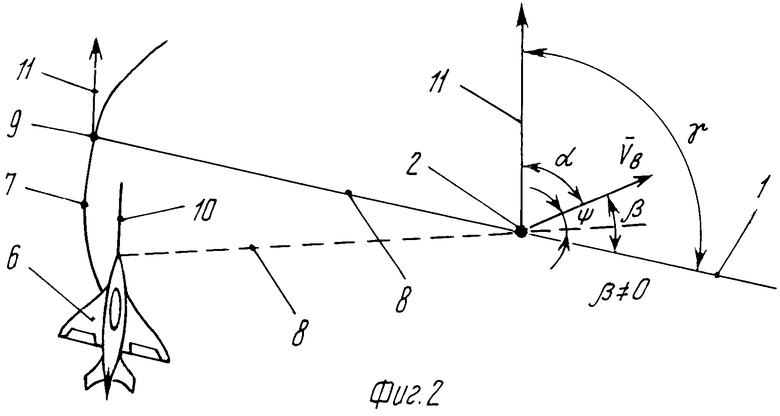
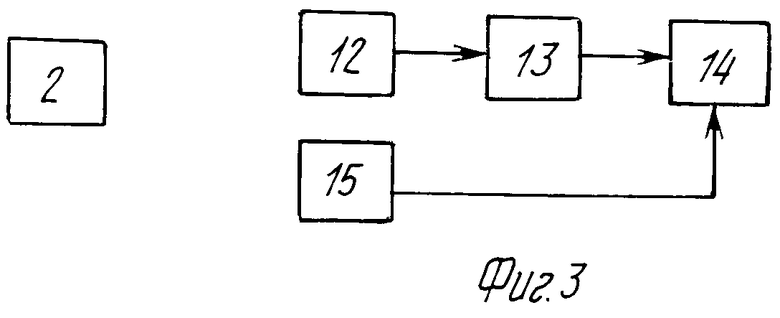
На фиг.1 изображен модулятор; на фиг.2 показан геометрия измерений; на фиг.3 - устройство для осуществления предложенного способа.
На чертеже приняты следующие обозначения: 1 - вертикальная плоскость, в которой доплеровский сдвиг и глубина амплитудной модуляции отраженного сигнала максимальны; 2 - модулятор (отражатель); 3 - система уголковых отражателей; 4 - стабилизатор плоскости вращения уголковых отражателей (флажок); 5 - опора модулятора; 6 - самолет; 7 - траектория полета самолета; 8 - линия визирования модулятора; 9 - местоположение самолета, когда измерена максимальная скорость ветра; 10 - продольная строительная ось самолета; 11 - северное направление географического меридиана; 12 - радиолокационная станция определения скорости ветра; 13 - блок выделения максимального результата; 14 - блок определения направления ветра; 15 - измеритель истинного пеленга радиоориентира.
Сущность способа заключается в следующем (см.фиг.1,2). Предлагается решить задачу в горизонтальной плоскости и определить горизонтальную составляющую вектора скорости ветра. Эта составляющая вектора скорости является определяющей при заходе самолета на посадку, т.е. необходимо определить проекцию вертикальной плоскости вектора скорости ветра 1 на горизонтальную плоскость. Для этого в модуляторе 2 обеспечивают возможность вращения системы уголковых отражателей 3 в вертикальной плоскости под заданным углом βк горизонтальной составляющей вектора скорости ветра. На фиг.1 представлен частный случай, когда β= 0 можно обеспечить, например с помощью стабилизатора плоскости вращения двух крестовин с четырьмя уголковыми отражателями на их концах. Угол βможно сделать равным 90о, если использовать, например, пропеллер с отражателями на его концах. На фиг.2 показан произвольный угол β.
Самолет 6 выполняет измерение с разных ракурсов на модулятор 2, выполняя облет его по траектории 7. Когда угол между линией визирования 8 и вектором скорости ветра  станет равным β (положение самолета 6 в точке 9) измеренное значение скорости ветра будет максимальным. В этот момент доплеровский сдвиг частоты будет максимальным, а также максимальной будет и глубина амплитудной модуляции принятого сигнала (определяется диаграммой переотражения уголковых отражателей).
станет равным β (положение самолета 6 в точке 9) измеренное значение скорости ветра будет максимальным. В этот момент доплеровский сдвиг частоты будет максимальным, а также максимальной будет и глубина амплитудной модуляции принятого сигнала (определяется диаграммой переотражения уголковых отражателей).
Измеряемый доплеровский сдвиг частоты отраженного от модулятора сигнала связан со скоростью ветра следующей зависимостью:
Δfд=  cosϕ cos(ϑ-β), где V - линейная скорость вращения уголкового отражателя, равная скорости ветра;
cosϕ cos(ϑ-β), где V - линейная скорость вращения уголкового отражателя, равная скорости ветра;
λ- длина волны сигнала;
ϕ- угол между проекцией ЛВ на плоскость вращения и направлением линейной скорости вращения уголкового отражателя;
Ψ- угол в горизонтальной плоскости между линией визирования и направлением ветра.
Существующая амплитудная модуляция с периодом
Т = 2πR/nV, где R - радиус вращения уголкового отражателя;
n = 4 - число плеч системы уголковых отражателей.
Измеряемая глубина амплитудной модуляции сигнала
m = (Umax - Umin)/(Umax + Umin), где Umax, Umin - максимальное и минимальное значение амплитуды, принимаемого с i-го ракурса; Истинный пеленг модулятора 2 γизвестен, он измеряется штатной аппаратурой летательного аппарата. В таком случае можно определить направление вектора скорости ветра
α=γ-β.
При оценке сдвига частоты наблюдаемая скорость ветра изменяется по косинусоидальному закону в зависимости от ракурса облучения системы отражателей, но доплеровский сдвиг частоты всегда больше нуля (уголковые отражатели удаляются при βи β+ 180), следовательно направление определяется неоднозначно. Неоднозначным будет измерение направления и при оценке глубины амплитудной модуляции сигнала (например, один их тот же уголковый отражатель при βотражает сверху, при β+ 180о снизу, амплитуда сигнала одинакова).
Последовательность операций предлагаемого способа следующая: в интересующую область пространства помещают неоседающий отражатель-модулятор, представляющий собой флажок и безынерционную систему уголковых отражателей, состоящую из симметрично соединенных по оси вращения двух крестовин и установленных на их концах уголковых отражателей, обращенных раскрывом перпендикулярно плечам крепления по часовой или против часовой стрелки в плоскости крестовин, при этом в результате взаимодействия флажка и системы уголковых отражателей с ветром флажок поворачивает систему уголковых отражателей вокруг вертикальной оси и стабилизирует плоскость их вращения в вертикальной плоскости действия ветра, а система уголковых отражателей вращается вокруг горизонтальной оси пропорционально скорости ветра.
Затем облучают отражатель электромагнитным сигналом и принимают сигнал, отраженный от него с доплеровским сдвигом, вносимым каждым j уголковым отражателем
Δf =
=  cosϕj cos(ϑ-β), где V - линейная скорость вращения уголкового отражателя, равная скорости ветра;
cosϕj cos(ϑ-β), где V - линейная скорость вращения уголкового отражателя, равная скорости ветра;
λ- длина волны сигнала;
ϕ- угол между проекцией ЛВ на плоскость вращения и направлением линейной скорости вращения уголкового отражателя;
Ψ- угол в горизонтальной плоскости между линией визирования и направлением ветра. амплитудной модуляцией с периодом
T = 2πR/nV, где R - радиус вращения уголкового отражателя;
n=4 - число плеч системы уголковых отражателей, и глубинной амплитудной модуляции сигнала:
mi = (Umax - Umin)/(Umax + Umin), где Umax,Umin - максимальное и минимальное значения амплитуды сигнала, принимаемого с i-го ракурса;
измеряют глубину амплитудной модуляции принятого сигнала;
измеряют доплеровский сдвиг частоты fдi и вычисляют по нему скорость ветра в радиальном направлении:
V =
=  Δf
Δf ;
;
измеряют истинный пеленг отражателя γi и повторяют вышеизложенные операции с других i ракурсов приема сигнала от отражателя, при этом сравнивают вычисленные по доплеровскому сдвигу fдi cкорости ветра и выбирают наибольшую из них Vвmax и, если для нее глубина амплитудной модуляции также максимальна, выбирают соответствующий им истинный пеленг отражателя, если нет, то повторяют вышеизложенные операции, после чего по выбранному пеленгу γи заданному углу между ожидаемым положением линии визирования отражателя и направлением ветра βопределяют направление ветра относительного северного направления географического меридиана:
α=γ-β.
На фиг. 3 представлена схема устройства, позволяющего реализовать способ. Устройство содержит модулятор 2, последовательно соединенные радиолокационную станцию определения скорости ветра 12, блок выделения максимального результата 13, блок определения направления ветра 14, а также соединенный с ним измеритель истинного пеленга радиоориентира 15.
Блок выделения максимального результата 13 сравнивает вычисленные значения Vвi и выделяет максимальное значение Vвmax, а также измеряет глубину амплитудной модуляции mi и выделяет ее максимальное значение mmax, если выделенные значения скорости ветра и глубины амплитудной модуляции соответствуют одному i-му ракурсу, то данный блок выдает сигнал в блок определения направления ветра 14, где вычисляется направление ветра.
Т.о. обеспечение степени свободы вращения уголковых отражателей в вертикальной плоскости под заданным углом β к горизонтальной составляющей вектора скорости ветра, измерение глубины амплитудной модуляции, изменение ракурса на модулятор при измерении скорости ветра, выделение максимальной скорости ветра и максимальной глубины амплитудной модуляции позволяют определить по соответствующему им ракурсу (истинному пеленгу) направление вектора скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2010 |
|
RU2449311C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА | 1992 |
|
RU2036826C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОТРАЖАТЕЛЬНЫХ СВОЙСТВ ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ В СВЧ ДИАПАЗОНЕ РАДИОВОЛН | 1997 |
|
RU2111506C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ ПРИ ДВУХПОЗИЦИОННОМ ЗОНДИРОВАНИИ | 2002 |
|
RU2225624C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
Использование: радиолокационная измерительная техника, системы посадки летательных аппаратов, измерение скорости и направления ветра в недосягаемых районах. Сущность изобретения заключается в помещении в интересующую область пространства неоседающего отражателя, его облучений электромагнитным сигналом и приеме сигнала отраженного от него с различных пеленгов приема, период амплитудной модуляции отраженного сигнала пропорционален скорости ветра как и доплеровский сдвиг частоты, который зависит и от косинуса угла между линией визирования отражателя и ее положения, когда она образует с направлением ветра известный угол β в горизонтальной плоскости, а амплитуда огибающей сигнала имеет максимальное значение, когда линия визирования составляет с направлением ветра данный угол b , при приеме сигнала для каждого i-го пеленга приема измеряют глубину амплитудной модуляции принятого сигнала и скорость ветра с последующим нахождением их максимальных значений, если для этих максимальных значений не один и тот же истинный пеленг отражателя g , то повторяют указанные измерения до их совпадения, если один и тот же пеленг - то измеренную скорость ветра считают истинной и определяют направление ветра относительно северного направления геофизического меридиана по формуле a = γ-β . 3 ил.
СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА, заключающийся в помещении в интересующую область пространства отражателей, движущихся под действием ветра и пропорционально его скорости, облучении отражателей электромагнитным сигналом и приеме сигнала, отраженного от них с различных i-х, где i = 2, 3, ..., ракурсов приема, измерении пропорционального скорости ветра допплеровского сдвига частоты fαi и истинного пеленга отражателя γi, вычислении скорости ветра VBi и направления ветра α , отличающийся тем, что в интересующую область пространства помещают неоседающий отражатель, период амплитудной модуляции отраженного от него сигнала пропорционален скорости ветра, при этом допплеровский сдвиг частоты зависит и от косинуса угла между линией визирования отражателя и ее положением, когда она образует с направлением ветра известный угол β в горизонтальной плоскости, а амплитуда огибающей сигнала имеет максимальное значение, когда линия визирования составляет с направлением ветра данный угол β , при приеме сигнала для каждого i-го пеленга приема измеряют глубину амплитудной модуляции mi принятого сигнала и скорость ветра VBi , определяют наибольшее значение глубины амплитудной модуляции mmax и наибольшее значение скорости ветра VBmax , если для полученных значений mmax и VBmax не один и тот же истинный пеленг отражателя γ , то повторяют вышеизложенные измерения до их совпадения, если один и тот же пеленг, то измеренную скорость ветра VBmax считают истинной и определяют направление ветра относительно северного направления географического меридиана по формуле α = γ - β .
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проблемы радиолокационной метеорологии | |||
| Перевод с англ | |||
| Под ред | |||
| Е.М.Сальмана | |||
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
