Изобретение относится к методам обработки радиолокационной информации и может быть использовано в многоканальных импульсно-доплеровских радиолокационных станциях (РЛС) сопровождения с перестройкой частоты от импульса к импульсу для распознавания воздушных ложных целей (ЛЦ), находящихся на сопровождении.
Известен способ селекции истинных воздушных целей (ВЦ) на фоне ложных по характеру изменения значения их эффективной площади рассеяния (ЭПР) в многочастотной РЛС [1]. Он основан на том, что ЭПР объекта зависит от трех характеристик: частоты излучаемых сигналов, их поляризации и угла, под которым облучается цель [2]. Суть способа заключается в том, что излучают зондирующие сигналы в направлении цели, по мере отражения от цели запоминают в течение некоторого времени t амплитуды отраженных сигналов. По запомненным амплитудам отраженных сигналов формируют диаграмму обратного рассеяния (ДОР) цели [2], показывающую зависимость амплитуд отраженных сигналов от изменения ракурса локации цели. Затем анализируют сформированную ДОР цели. При этом задаются определенной величиной изменения уровня отраженного сигнала от цели ΔU и измеряют величину изменения ракурса локации цели Δγ, приводящего к заданному изменению амплитуды отраженного сигнала ΔU. Далее сравнивают измеренную величину Δγ изменения ракурса локации с заранее установленным пороговым значением Δγпор. В случае превышения порога принимают решение о наличии ЛЦ.
Данный способ эффективен только в отношении ЛЦ старого парка типа уголковых отражателей, линз и т.п. Недостатком данного способа является то, что он не обеспечивает селекцию современных ЛЦ, имитирующих изрезанность ДОР.
Известен также способ селекции ложных целей на фоне реальных ВЦ [3], который использует признак, не поддающийся имитации современными ЛЦ и являющийся работоспособным в условиях применения любых типов ЛЦ, включая современные имитаторы типа MALD. Способ предполагает одновременное сопровождение выбранной ВЦ двумя синхронизированными по времени и разнесенными на местности на расстояние d РЛС. Это расстояние d должно быть таким, чтобы на основной дальности сопровождения цели г разность углов локации цели Δβ для РЛС1 и РЛС2 составляла единицы градусов. Обе РЛС излучают импульсные зондирующие сигналы с одинаковым периодом повторения Ти в направлении цели. В каждой из двух синхронизированных по времени t РЛС в течение некоторого времени Δt в оперативных запоминающих устройствах (ОЗУ) цифровых вычислительных машин (ЦВМ) запоминают амплитуды отраженных от цели сигналов и точное время прихода каждого из них.
Из запомненных амплитуд и значений времени прихода каждого импульса в РЛС1 формируют двумерный массив данных M1, а в РЛС2 - двумерный массив данных М2 [4]. Эти массивы выражают собой диаграммы обратного рассеяния цели, полученные на интервале времени Δt, соответствующем изменению ракурса локации цели на Δγ.
На первом этапе распознавания используют данные массива M1, сформированного в РЛС1, и предложенный в [1] признак. Это позволяет на основе известного способа селектировать ЛЦ типа уголковых отражателей или TALD [5, 6] на фоне реальных ВЦ. Для этого по отраженным от цели сигналам в основной РЛС 1 известными методами [7] определяют угол места цели 8, азимут цели β, скорость цели Vц и наклонную дальность до цели r. В ЦВМ РЛС1 вычисляют пространственный ракурс сопровождения цели γ и скорость изменения ракурса локации цели  по формулам [8]:
по формулам [8]:
γ=arccos(cosε·cosβ),
Задают определенный уровень изменения амплитуды отраженного сигнала ΔU, анализируют сформированный двумерный массив данных M1 и находят интервал времени ΔtΔU, в течение которого амплитуда отраженного сигнала изменяется на величину ΔU. Для этого из массива M1 выбирают элемент с номером n, соответствующий максимальному значению амплитуды отраженного сигнала Un. Номер элемента n принимают за начало отсчета. Последовательно номер элемента изменяют на единицу и находят номер k такого элемента массива, в котором записана амплитуда отраженного сигнала Uk, отличающаяся от амплитуды Un на величину U. Далее находят интервал времени, соответствующий изменению амплитуды отраженного сигнала на величину ΔU, по формуле:
ΔtΔU=TИ|n-k|
Вычисляют величину изменения ракурса локации цели Δγ, приводящую к изменению амплитуды отраженного сигнала на ΔU, по формуле:
Δγ=Δ tΔU.
tΔU.
Вычисленную величину изменения ракурса локации Δγ сравнивают с пороговым значением Δγпор, и в случае превышения величиной Δγ порогового значения Δγпор сразу принимают окончательное решение о наличии ЛЦ.
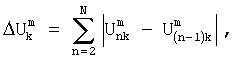
В противном случае на втором этапе распознавания используют двумерные массивы данных M1 и М2, полученные соответственно в РЛС1 и РЛС2. Для выявления идентичности либо несоответствия массивов M1 и М2 производят их сравнение. Если ДОР в обеих РЛС будут сформированы имитирующим сигналом ЛЦ типа MALD, то они будут идентичными. При формировании массивов отражениями от реальной цели ДОР в РЛС1 и РЛС2 должны отличаться. Для сравнения двумерных массивов M1 и М2 оцифрованные данные, выражающие массив М2, передают по средствам связи в РЛС1. ЦВС РЛС1 производит поимпульсное сравнение амплитуд отраженных сигналов, полученных с помощью РЛС1 и РЛС2. Для этого из массива M1 берут первый элемент U1M1, а из массива М2 - первый элемент U1M2. Их значения сравнивают и вычисляют модуль разности: |u1m1-U1M2|. Затем из массивов M1 и М2 берут вторые элементы и вычисляют аналогичную разность [u2m1-U2M2|. Данную операцию повторяют до окончания перебора всех элементов массива. Правильное соответствие амплитуд отраженных сигналов по времени обеспечивают синхронизацией РЛС1 и РЛС2, а также записью в массивы совместно с амплитудой n-го сигнала точного времени его прихода. Полученные модули разностей складывают. В результате производится вычисление величины несоответствия ДОР РЛС1 и РЛС2 по формуле:
где N - количество сравниваемых элементов.
Полученное значение ΔUΣ сравнивают с пороговой величиной ΔUпор. В случае превышения величиной ΔUΣ порога принимают окончательное решение о наличии реальной ВЦ. В противном случае принимают окончательное решение о наличии ЛЦ.
Недостатком данного способа является то, что для селекции современных ЛЦ типа MALD [5, 6] необходимо привлечение двух РЛС. При этом одновременно может производиться распознавание только одной цели, что противоречит современной концепции построения многоканальных радиолокационных комплексов. Время накопления отраженных сигналов для принятия решения о типе цели зависит от дальности до нее, поскольку требуемое изменение ракурса локации при увеличении расстояния до ВЦ будет происходить за больший промежуток времени. Таким образом, применение способа распознавания [3] в ряде случаев оказывается трудновыполнимым и нецелесообразным.
Задачей изобретения является разработка более совершенного способа одновременной селекции нескольких ложных целей независимо от их типа на фоне реальных воздушных целей в многоканальной импульсной РЛС сопровождения.
Для решения указанной выше задачи предлагается производить анализ степени изрезанности амплитудно-частотных характеристик (АЧХ) нескольких одновременно сопровождаемых целей в РЛС с сигналами, перестраиваемыми по частоте от импульса к импульсу. Используемая при этом РЛС должна быть оснащена фазированной антенной решеткой (ФАР), способной электронным способом изменять положение своей диаграммы направленности [9]. На таком принципе строятся все современные РЛС, в которых необходимо следить за несколькими целями одновременно.
После обнаружения некоторого числа воздушных целей РЛС по определенному критерию выбирает для сопровождения М наиболее важных целей. Число М выражает максимально возможное количество целей, которое способна одновременно сопровождать РЛС. Указанное число М принято называть числом целевых каналов. Если число М больше числа обнаруженных целей, то несколько каналов остаются незанятыми (свободными). Если М=1, то РЛС называют одноканальной. Если М=2, РЛС считают двухканальной. При М>2 РЛС относится к многоканальным. При сопровождении ФАР РЛС последовательно излучает в направлении каждой цели сигналы с перестройкой частоты в течение одинакового интервала времени Δt. Излучение сигналов в направлении цели будем называть обращением к цели. Отраженные от цели сигналы принимаются тем же каналом, который использовался при излучении. Таким образом, в течение первого интервала Δt РЛС обращается к первой цели, в течение 2-го интервала Δt - ко второй цели и так далее до М-го интервала Δt, в течение которого РЛС обращается к М-й цели. Интервалы Δt между собой не пересекаются и не имеют разрывов во времени (конец предыдущего интервала совпадает с началом последующего), так что длительность одного цикла обращения к М целям составляет M×Δt. В течение интервала Δt очередная цель должна менять свой ракурс относительно РЛС на малую величину (сотые...тысячные доли градуса). Поэтому интервал Δt выбирают сравнимым с интервалом угловой корреляции цели, составляющим единицы мс.
В пределах каждого такого временного интервала Δt с помощью РЛС излучают в направлении очередной цели многочастотные импульсные последовательности, в которых перестройку несущей частоты осуществляют от импульса к импульсу в интервале от f0 до f0+ΔF с одинаковым шагом dF. При таком построении зондирования n-й по счету сигнал каждой N-импульсной последовательности излучают на частоте f0+(n-1)ΔF/N. К каждой цели РЛС обращается одинаковое время Δt. Для современных многоканальных РЛС указанное число целевых каналов М не превышает 10.
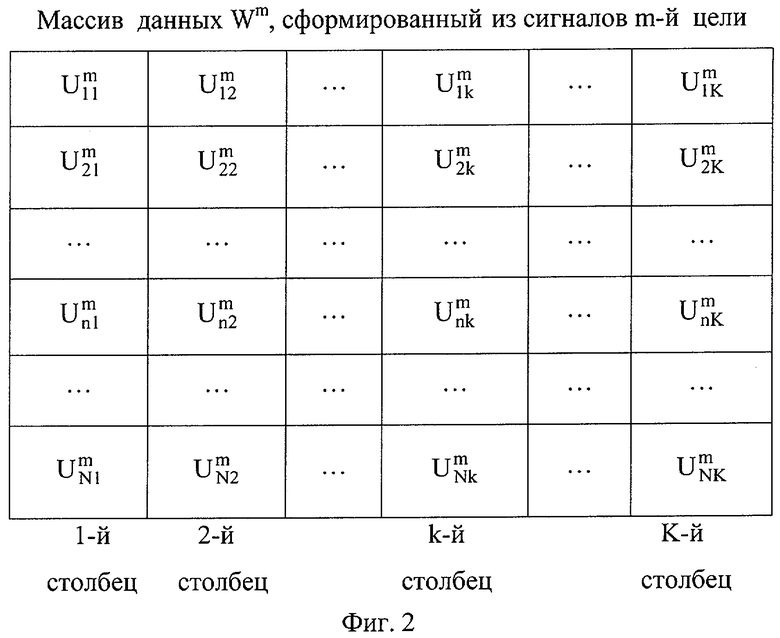
Используют сантиметровый диапазон длин волн, что соответствует квазиоптической области рассеяния радиоволн поверхностью современных летательных аппаратов. Диапазон перестройки ΔF выбирают на два три порядка ниже основной частоты f0. Например, при f0=1010 Гц выбирают ΔF=150 МГц. Амплитуды отраженных от М целей сигналов запоминают в ОЗУ цифровой вычислительной машины. Из запомненных амплитуд в РЛС для m-й цели создают частный двумерный массив данных Wm размером n×k, где N - количество используемых частот, а К - количество многочастотных последовательностей, накапливаемых за время обращения Δt ФАР РЛС к очередной цели. Под накоплением понимают процесс приема, оцифровки и записи в цифровом виде в ОЗУ РЛС информации о параметрах отраженных от цели импульсов.
Интервал угловой корреляции Δt выбирают так, чтобы в его пределах амплитуда отраженных сигналов при повороте цели изменялась несущественно. При значительно превышающих длину волны λ размерах цели минимальная ширина лепестка ДОР Δθмин вычисляется по формуле [2]

где L⊥макс - максимальное расстояние между рассеивающими центрами (РЦ) на освещенной поверхности цели в перпендикулярном относительно линии визирования цели (ЛВЦ) направлении. Значение θмин определяет степень изрезанности ДОР. Например, при периоде повторения импульсов в квазинепрерывном режиме ТИ=30 мкс, λ=3 см, L⊥макс=50 м, угловой скорости поворота цели Ωвр=2°/с за время накопления 64 импульсов цель изменит свой ракурс всего лишь на Δγ=0,0038°, в то время как согласно формуле (1) θмин=0,0172°. Время флюктуации амплитуды отраженного одночастотного сигнала в пределах минимального лепестка ДОР составит Точ=Δθмин/ Ωвр=8,6 мс. Интервал высокой угловой корреляции Δt принимают равным половине временного интервала формирования самого узкого лепестка ДОР, то есть Δt=4,3 мс. При выборе интервала высокой угловой корреляции Δt следует руководствоваться требованием, чтобы в пределах Δt амплитуда отраженных сигналов за счет поворотов цели изменялась несущественно, а в наилучшем случае - оставалась постоянной. Количество частот N для формирования АЧХ рекомендуется выбирать равным 64, поскольку в этом случае для ускорения процесса обработки радиолокационной информации становится пригодным алгоритм быстрого преобразования Фурье, а также обеспечиваются достаточно информативные (детальные) АЧХ и формируемые из них дальностные портреты. Однако количество частот в общем случае может лежать в пределах от 30 до 300, что не ухудшит работоспособность предлагаемого способа селекции ЛЦ. Если число каналов превышает число целей, то несколько каналов остаются незанятыми и исключаются из обработки. Малое рекомендуемое время Δt накопления многочастотных последовательностей в каждом целевом канале обеспечивает поддержание режима устойчивого сопровождения всех М целей.
Максимальный период следования зондирующих импульсов в РЛС Ти макс, обеспечивающий накопление в течение интервала высокой угловой корреляции Δt всего лишь одной многочастотной последовательности сигналов, можно определить по формуле Ти макс=Δt/N. Например, для N=64 и Δt=4,5 мс период Ти макс=133 мкс. Тогда, зная минимальный период следования импульсов Ти мин конкретной РЛС (например, Ти мин=30 мкс), количество многочастотных выборок отраженных сигналов в одном канале сопровождения находят по формуле К=f*(Ти макс/Tи мин), где f*(...) - функция определения целой части числа, так как количество многочастотных последовательностей не должно быть дробным числом. Далее находят точное значение рабочего периода повторения РЛС Т по формуле Ти р=Ти макс/К. Для рассматриваемого примера К=4 и Ти=33,25 мкс. Из частных массивов Wm для отдельных m-х целей (верхний индекс m означает принадлежность данных к сигналам от m-й цели) формируют генеральный массив W, содержащий информацию об отраженных сигналах всех М целей, сопровождаемых РЛС. Структура генерального массива W для М целевых каналов и N-частотного сигнала приведена на фиг.1.
На фиг.2 изображена структура частного массива Wm, сформированного для m-й цели при использовании N частот. Совокупность амплитуд отраженных сигналов в каждом столбце массива Wm представляет собой участок АЧХ m-й цели [1, 10, 11]. Указанная АЧХ соответствует случайному текущему ракурсу цели.
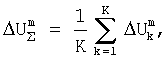
В интересах селекции ЛЦ в каждом столбце сформированного частного массива Wm оценивают степень изрезанности АЧХ цели. Для этого в каждом k-м столбце массива Wm последовательно вычисляют абсолютные значения разностей  для n=2...N. Полученные значения складывают между собой для получения оценки
для n=2...N. Полученные значения складывают между собой для получения оценки  изрезанности АЧХ цели в k-м столбце
изрезанности АЧХ цели в k-м столбце
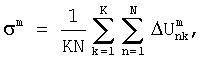
Данная операция производится для всех К столбцов массива Wm. Полученные значения  усредняются для всех многочастотных последовательностей в пределах времени обращения РЛС к m-й цели
усредняются для всех многочастотных последовательностей в пределах времени обращения РЛС к m-й цели
где  - суммарная оценка изрезанности АЧХ цели.
- суммарная оценка изрезанности АЧХ цели.
Нахождение усредненных оценок необходимо для того, чтобы исключить принятие неправильных решений при случайных выбросах амплитуды отраженного сигнала (скачки питающих напряжений, случайное кратковременное изменение коэффициента усиления приемника РЛС и т.д.).
Значение сравнивают с априорно установленной пороговой величиной ΔUпор. В случае превышения значением порога принимают решение о наличии в m-м целевом канале реальной ВЦ. В противном случае принимается решение об отнесении объекта локации к классу малоразмерных целей, включающему как ЛЦ типа MALD, так и другие объекты, радиальная протяженность которых не превышает 1-2 м.
Для принятия окончательного решения о наличии ЛЦ на втором этапе распознавания используют сравнение ЭПР m-го объекта локации σm с установленным пороговым значением σпор. При превышении порога принимают решение о наличии ЛЦ.
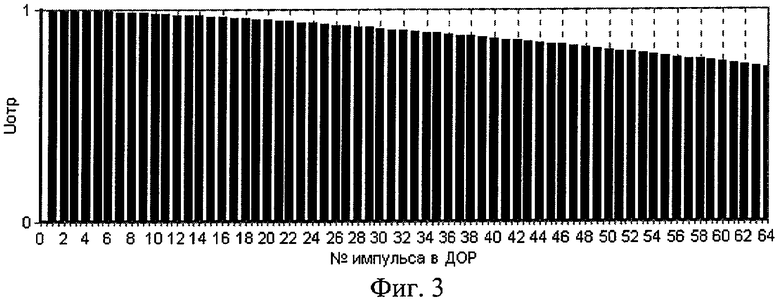
Сущность первого этапа селекции состоит в том, что изрезанность ДОР воздушных целей определяется максимальным перпендикулярным линии визирования цели расстоянием между рассеивающими центрами (РЦ) на освещенной поверхности цели [2], а изрезанность АЧХ определяется радиальной структурой цели. На сложность структуры ДОР также влияют количество РЦ и значение рабочей длины волны РЛС. Например, при периоде повторения импульсов в квазинепрерывном режиме Ти=30 мкс, λ=3 см, L⊥макс=50 м, угловой скорости поворота цели ΩВР=2°/c время флюктуации амплитуды отраженного одночастотного сигнала в пределах минимального лепестка ДОР составит Точ=8,6 мс. При использовании многочастотной последовательности из 64 импульсов с общим временем накопления 64Ти=1,9 мс даже в случае попадания в пределы самого узкого лепестка реальной или имитируемой ложной целью типа MALD диаграммы обратного рассеяния амплитуда отраженных сигналов в АЧХ должна изменяться незначительно, как, например, показано на фиг.3. Представленная на фиг.3 характеристика получена методом математического моделирования и проверена экспериментально в условиях безэховой камеры с масштабной моделью объекта.
Для реальных воздушных целей (особенно крупноразмерных) изменение рабочей длины волны приводит к изменению интерференционной картины отраженных от РЦ электромагнитных волн. Следовательно, амплитуда принимаемых РЛС импульсов будет являться функцией частоты и изменяться по закону, зависящему от взаимного расположения РЦ поверхности цели на используемом ракурсе. Изрезанность АЧХ зависит от максимального радиального размера цели и величины изменения несущей частоты сигнала. Когда при перестройке несущей частоты зондирования разность фаз между сигналами, отраженными от РЦ поверхности цели, начинает меняться, амплитуда отраженных волн также изменяется. В результате таких эволюций формируются лепестки АЧХ цели. Если радиальное расстояние между РЦ увеличивается, ширина лепестка АЧХ уменьшается. Если разность фаз сигналов, отраженных от наиболее разнесенных в радиальном направлении РЦ, при соответствующем изменении частоты изменяется на 360°, то формируется минимальный по ширине лепесток АЧХ. Это максимальное изменение разности фаз Δϕмакс соответствует минимальному интервалу частотной корреляции [12]. Указанное изменение разности фаз, вызванное изменением частоты, определяется по формуле
Δϕмакс=Δϕ0-Δϕ,
где Δϕ0=4πL||максf0/c - разность фаз сигналов, отраженных от двух РЦ, если дальности до этих РЦ отличаются на величину L||макс, а зондирование проводилось на частоте f0; с - скорость света; L||макс- максимальный разнос РЦ в радиальном направлении на поверхности цели;  - разность фаз сигналов, отраженных этими же РЦ, но при изменении несущей частоты на величину
- разность фаз сигналов, отраженных этими же РЦ, но при изменении несущей частоты на величину ; TМЧ - период формирования лепестка АЧХ при перестройке частоты, равный интервалу времени, в течение которого произошло изменение частоты по указанному выше закону, то есть с шагом dF=ΔF/N. Учитывая, что полный лепесток в АЧХ формируется при ϕмин=2π, время формирования минимального по ширине лепестка в АЧХ определяется по формуле
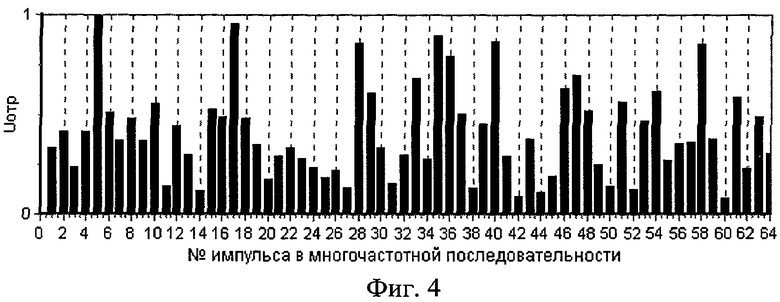
; TМЧ - период формирования лепестка АЧХ при перестройке частоты, равный интервалу времени, в течение которого произошло изменение частоты по указанному выше закону, то есть с шагом dF=ΔF/N. Учитывая, что полный лепесток в АЧХ формируется при ϕмин=2π, время формирования минимального по ширине лепестка в АЧХ определяется по формуле  . При накоплении 64 импульсов с перестройкой несущей частоты от импульса к импульсу в диапазоне ΔF=150 М Гц, радиальной протяженности цели L||макс=50 м, периоде следования импульсов Ти=10 мкс и длине волны λ=3 см время формирования одного лепестка АЧХ составит Тмч=19,2 мкс. Вариант АЧХ крупноразмерного самолета приведен на фиг.4.
. При накоплении 64 импульсов с перестройкой несущей частоты от импульса к импульсу в диапазоне ΔF=150 М Гц, радиальной протяженности цели L||макс=50 м, периоде следования импульсов Ти=10 мкс и длине волны λ=3 см время формирования одного лепестка АЧХ составит Тмч=19,2 мкс. Вариант АЧХ крупноразмерного самолета приведен на фиг.4.
Таким образом, при использовании предложенного режима перестройки частоты от импульса к импульсу формирование лепестка АЧХ происходит во много раз быстрее, чем лепестка ДОР (Тмч≪Точ), так как природа возникновения лепестка АЧХ не связана с характером поворота цели при ее полете. Ширина лепестка в АЧХ зависит не только от радиальных размеров цели, но и от диапазона перестройки несущей частоты. Время же формирования всей АЧХ цели определяется только параметрами РЛС, то есть не зависит от характеристик движения цели.
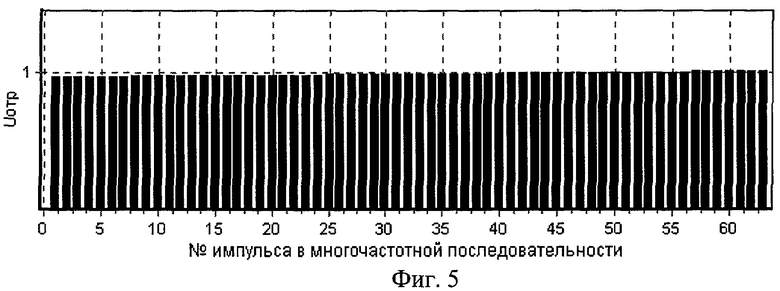
В случае применения ложных целей старого парка, использующих в качестве переизлучателей сигналов линзы Люнеберга и уголковые отражатели, при рассматриваемом диапазоне перестройки несущей частоты РЛС изменение амплитуды отраженных от ЛЦ зондирующих сигналов будет несущественным [2]. Зависимость ЭПР линзы Люнеберга от длины волны показана на фиг.5. Оценка изрезанности АЧХ в этом случае также будет минимальна.
Ложные цели нового поколения имитируют реальные ВЦ путем усиления переизлучаемого сигнала до необходимого уровня и придания ему соответствующих характеристик изрезанности ДОР [13]. Это может быть осуществлено амплитудной модуляцией переизлучаемого сигнала [14]. Современные имитаторы применяются для дезинформации РЛС в широком диапазоне длин волн, от сантиметрового до метрового [13], и ориентированы на введение в заблуждение операторов существующих одночастотных РЛС. Следовательно, коэффициент усиления переизлучаемого ложной целью сигнала не должен зависеть от перестройки частоты в диапазоне, уступающем несущей частоте РЛС на 2...3 порядка. Таким образом, амплитуды принимаемых РЛС импульсов (в предложенном способе это будет происходить на различных частотах) будут являться только функцией закона модуляции усилителя ЛЦ. Закон изменения коэффициента усиления ретранслятора ЛЦ жестко привязан к времени. Форма огибающей амплитуды переизлученных ложной целью импульсов должна соответствовать форме имитируемой ДОР воздушной цели. Ширина моделируемых лепестков может быть определена по формуле (1). Например, для длины волны λ=3 см и поперечного размера цели L⊥макс=30 м минимальная ширина лепестка ДОР составит ΔΘмин 0,0287°. В общем случае при повороте воздушной цели относительно РЛС с угловой скоростью 2% за время набора последовательности из 64 импульсов с Ти=30 мкс изменение ракурса локации составит всего лишь 0,00384°. Это почти в 7,5 раз меньше самого узкого лепестка в ДОР, вследствие чего и амплитуда отраженных сигналов во всем наборе изменится несущественно. При имитации ложной целью самолета с поперечным размером 30 м период модуляции переизлучаемых импульсов будет много больше времени набора многочастотной последовательности. Усредненная оценка изрезанности АЧХ ЛЦ будет значительно меньше, чем в случае реальной воздушной цели. Увеличение поперечного размера цели и угловой скорости ее поворота ухудшает информативность признака. Однако информативность может быть восстановлена применением сигналов с меньшим периодом повторения (Ти=10 мкс).
Кроме изрезанности ДОР ЛЦ могут производить имитацию наличия вторичной модуляции реальных целей, обусловленной турбовинтовым эффектом (ТВЭ). Это осуществляется путем дополнительной модуляции амплитуды переизлучаемых импульсов. Для реальной воздушной цели частота модуляции амплитудной огибающей отраженных от вращающихся элементов цели импульсов определяется частотой вращения элементов и их количеством. Глубина модуляции пропорциональна отношению ЭПР лопаток турбин и планера цели [1]. Частота модуляции отраженного сигнала, вызванная ТВЭ, намного превышает частоту флюктуации ЭПР в ДОР. Однако необходимо учитывать, что планерная составляющая в отраженном сигнале в большинстве случаев значительно превышает составляющую, обусловленную ТВЭ. Значит, глубина турбовинтовой модуляции огибающей последовательности отраженных импульсов будет намного меньше, чем изменение амплитуды сигналов, вызванное интерференцией электромагнитных волн при отражении от РЦ планера.
Таким образом, последовательность ретранслируемых современной ЛЦ типа MALD импульсов может быть промодулирована двумя составляющими с частотами модуляции, обусловленными необходимостью имитации:
1) ДОР планера реальной цели;
2) наличия турбовинтового эффекта, проявляющегося в основных гармониках на частотах до 5000 Гц, что соответствует периоду модуляции Ттэ>200 мкс.
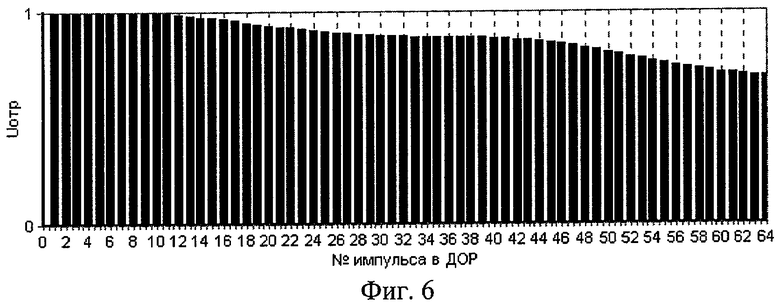
На фиг.6 показана зависимость ДОР реальной ВЦ с учетом ТВЭ. Таким образом, ложная цель, имитирующая изрезанность ДОР реальной ВЦ с учетом ТВЭ, должна использовать закон модуляции, вариант которого показан на фиг.6.
Для того чтобы сформировать ДОР имитируемой воздушной цели, глубина высокочастотной турбовинтовой модуляции ретранслируемого сигнала не должна быть большой. В противном случае она приведет к очень сильной (не соответствующей реальности) изрезанности ДОР цели. Причем ширина лепестков в такой ДОР будет одинаковой и сниженной на порядок, а в реальной ДОР ширина лепестков всегда различна. Период модуляции ТВЭ должен быть значительно больше времени формирования лепестка АЧХ Ттэ>Тмч. Значит, при наличии имитации ТВЭ оценка изрезанности формируемой АЧХ будет немного увеличиваться в пределах допустимого уровня, не превышая установленного порога селекции ЛЦ. К тому же, на ракурсах более 50...60° полости воздухозаборников в турбореактивных летательных аппаратах закрыты для электромагнитных волн, и отражения от вращающихся частей отсутствуют. В этом случае изрезанность АЧХ реальных целей будет зависеть только от количества и взаимного расположения РЦ на поверхности цели.
При принятии на первом этапе селекции решения об отнесении ВЦ к классу малоразмерных целей используют второй этап селекции. При попадании в диаграмму направленности РЛС малоразмерной цели (крылатая ракета, беспилотный летательный аппарат и т.д.), имеющей один локальный РЦ, формируемая АЧХ будет иметь гладкий вид. Оценка изрезанности АЧХ примет такое же значение, как и для ЛЦ. Однако для боевых малоразмерных целей применяют различные способы снижения ЭПР, а для ЛЦ наоборот - искусственно увеличивают интенсивность отражения. Поэтому окончательную селекцию целесообразно проводить на основе сравнения уровня ЭПР ВЦ с априорно установленным пороговым значением. При превышении порога принимается решение о пеленге ЛЦ.
Обработку информации, содержащуюся во всех частных массивах Wm, проводят идентично. В результате этого при обработке генерального массива W принимают решение об отнесении объекта локации каждого m-го целевого канала к классу реальных или ложных. То есть при сопровождении М целей после одного цикла обращения ко всем целям имеется возможность судить о числе реальных объектов из общего количества целей, взятых на сопровождение.
При изменении частоты от импульса к импульсу известные методы сопровождения по угловым координатам и дальности, подробно изложенные в [2, 7, 9], остаются в силе. Сопровождение цели по скорости и защита от пассивных помех при указанных выше изменениях частоты также возможны и достаточно подробно изложены в [15, 16]. Поэтому можно утверждать, что предложенный метод селекции является реализуемым.
Как видно из описания предлагаемого способа селекции ЛЦ, он обладает преимуществом по сравнению с прототипом [3]. Это выражается в том, что для селекции нескольких ЛЦ на фоне реальных ВЦ достаточно использовать одну многоканальную РЛС, применяющую сигналы с поимпульсной перестройкой частоты. По сравнению с прототипом устранена зависимость времени принятия решения от скорости изменения ракурса. Таким образом, способ позволяет одновременно селектировать несколько ЛЦ различных типов, решая задачу изобретения.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984, с.96-99 (аналог).
2. Финкельштейн М.И. Основы радиолокации. Учебник для вузов. М.: Сов. радио, 1973, 496 с.
3. Патент РФ №2225624 от 10.03.2004 г. Способ распознавания ложных воздушных целей при двухпозиционном зондировании. Заявка №2002121150. Приоритет 09.08.2002 г. (прототип).
4. Фараонов В.В. Delphi 5. Руководство программиста. - М.: «Нолидж», 2001, с.107, 137.
5. Афинов В. Новое направление развития западных средств РЭП индивидуальной защиты самолетов // Зарубежное военное обозрение. 1999, №8, с.39-42.
6. Палий А. И. Радиоэлектронное подавление. - М.: Воениздат, 1989, с.86-92, 285-287.
7. Теоретические основы радиолокации / Под ред. Я.Д.Ширмана. М.: Сов. радио, 1970, 560 с.
8. Стайнберг Б.Д. Формирование радиолокационного изображения самолета в диапазоне СВЧ // ТИИЭР, 1988, №12, т.76, с.26-46.
9. Дулевич В.Е. Теоретические основы радиолокации. М.: Сов. радио, 1978, 607 с.
10. Костылев А.А. Идентификация радиолокационных целей при использовании сверхширокополосных сигналов: методы и приложения // Зарубежная радиоэлектроника. 1984, №4, с.75.
11. Пасмуров А.Я. Получение радиолокационных изображений летательных аппаратов // Зарубежная радиоэлектроника. 1987, №12, с.3.
12. Вишин Г.М. Многочастотная радиолокация. - М.: Воениздат, 1973, 92 с.
13. Афинов В. Тенденции развития средств РЭБ авиации Вооруженных сил США на пороге XXI века // Зарубежное военное обозрение. 1998, №6, с.28-35.
14. Небабин В.Г., Белоус О.Н. Методы и техника противодействия радиолокационному распознаванию // Зарубежная радиоэлектроника. 1987, №2, с.38.
15. Патент РФ №2234719 от 20.08.2004 г. Радиолокационная система с перестройкой несущей частоты от импульса к импульсу в режиме СДЦ.
16. Патент РФ №2166772 от 10.05.2001 г. Обнаружитель-измеритель многочастотных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ ПРИ ДВУХПОЗИЦИОННОМ ЗОНДИРОВАНИИ | 2002 |
|
RU2225624C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ | 2003 |
|
RU2234110C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ПО ТРАЕКТОРНЫМ НЕСТАБИЛЬНОСТЯМ ЕЕ ПОЛЕТА | 2000 |
|
RU2180445C2 |
| СПОСОБ ВЫБОРА ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ С РАССЧИТЫВАЕМОЙ УГЛОВОЙ СКОРОСТЬЮ ПОВОРОТА ЦЕЛИ ОТНОСИТЕЛЬНО РАДИОЛОКАТОРА | 2007 |
|
RU2360267C1 |
| СПОСОБ ВЫБОРА ПОЛОЖЕНИЯ ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ ПРИ НАЛИЧИИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С ВОЗМОЖНОСТЬЮ ОЦЕНКИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ОТНОСИТЕЛЬНО РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2009 |
|
RU2409823C1 |
Изобретение относится к методам распознавания воздушных целей по сигнальным признакам, то есть по характерным особенностям отраженных от различных целей радиолокационных сигналов. Способ может быть использован в многоканальных импульсно-доплеровских РЛС сопровождения с перестройкой частоты от импульса к импульсу. Способ применим для установления факта принадлежности целей к классу ложных. При одновременном сопровождении М целей с помощью М целевых каналов в результате селекции принимается решение о принадлежности к классу реальных или ложных для каждой m-й цели в отдельности. Селекцию предлагается проводить в два этапа. На первом этапе по степени изрезанности амплитудно-частотной характеристики каждой цели объекты делятся на 2 класса: класс реальных целей и класс, включающий ложные цели и малоразмерные реальные летательные аппараты. На втором этапе по среднему уровню отраженных сигналов принимается окончательное решение об отнесении каждой из М сопровождаемых целей к классу ложных. Достигаемым техническим результатом является тот факт, что при использовании заявленного способа селекция возможна как в отношении уголковых отражателей, линз и других устаревающих имитаторов, так и в отношении последних модификаций ложных ретрансляторов типа TALD или MALD. 6 ил.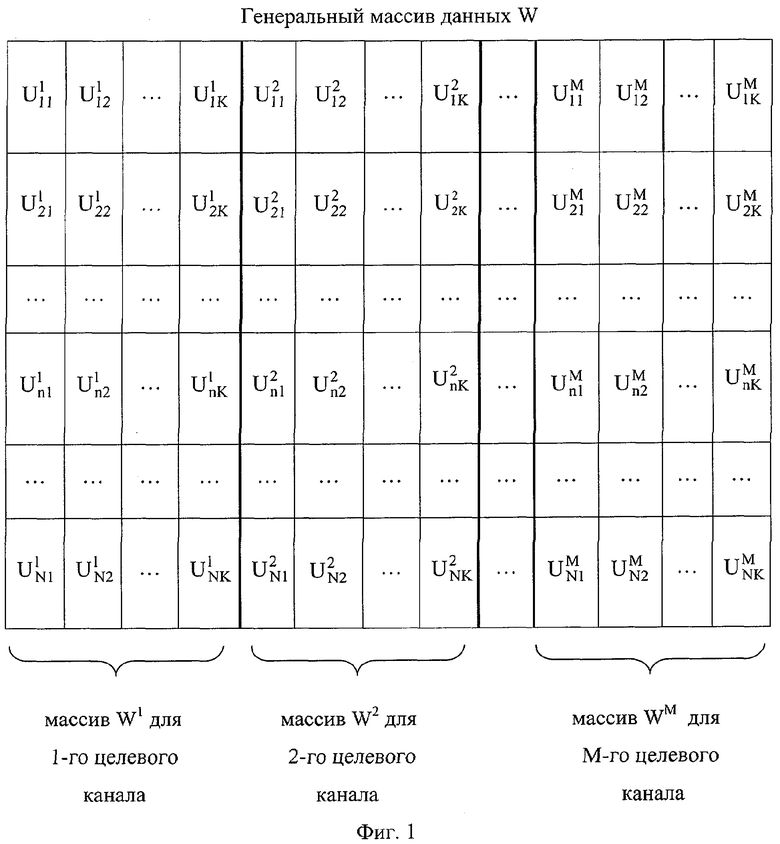
Способ селекции ложных воздушных целей, заключающийся в том, что с помощью радиолокационной станции в течение интервала времени Δt излучают в направлении выбранной цели импульсные зондирующие сигналы, принимают отраженные от цели сигналы, амплитуды которых запоминают в оперативном запоминающем устройстве и создают из запомненных амплитуд массив данных, отличающийся тем, что при использовании в радиолокационной станции фазированной антенной решетки ведут одновременное сопровождение М целей (М<10) методом последовательного обращения луча фазированной антенной решетки к 1-й, 2-й,..., m-й,... и М-й цели, причем при зондировании применяют импульсные сигналы с поимпульсной перестройкой частоты на ΔF/N от f0 до f0+ΔF, где ΔF - диапазон перестройки частоты, N - число используемых частот, составляющее от 30 до 300, так что n-й сигнал N - импульсной последовательности излучают на частоте f0+(n-1)ΔF/N, к каждой цели обращаются в течение одинакового времени Δt, составляющего до 4,5 мс, при этом в течение первого интервала Δt излучают сигналы в направлении первой цели, в течение второго интервала Δt - в направлении второй цели и так далее до М-го интервала Δt, в течение которого излучают сигналы в направлении М-й цели, причем интервалы Δt между собой не пересекаются и не имеют разрывов во времени, т.е. конец каждого предыдущего интервала совпадает с началом последующего, так что длительность одного цикла обращения к М целям составляет M×Δt, для получения в течение интервала Δt целого числа К N-частотных импульсных последовательностей вычисляют величину Ти макс по формуле Ти макс=Δt/N, находят число К по формуле
К=f*(Ти макс/Ти мин),
где Ти мин - минимально возможный период повторения импульсов в радиолокационной стадии, a f*(...) - функция определения целой части числа, рассчитывают рабочий период повторения импульсов Ти р по формуле Ти р=Ти макс/К и используют этот период повторения в течение всего времени сопровождения М целей, запоминание амплитуд отраженных от m-й цели сигналов производят в соответствующем m-м массиве Wm, состоящем из К столбцов и N строк, так что в каждом k-м столбце массива Wk m амплитуда отраженного сигнала изменяется в соответствии с линейным изменением частоты от импульса к импульсу, на первом этапе селекции для определения в m-м целевом канале сопровождения оценки изрезанности амплитудно-частотной характеристики m-й цели вычисляют по данным k-го столбца массива Wm величину оценки
где  и
и  - соответственно значения амплитуд отраженного m-й целью сигнала на n-й и (n-1)-й частотах в k-м столбце, затем усредняют оценки изрезанности амплитудно-частотных характеристик m-й цели, вычисленных в К столбцах массива Wm по формуле
- соответственно значения амплитуд отраженного m-й целью сигнала на n-й и (n-1)-й частотах в k-м столбце, затем усредняют оценки изрезанности амплитудно-частотных характеристик m-й цели, вычисленных в К столбцах массива Wm по формуле
вычисленную для m-й цели усредненную оценку  сравнивают с заранее установленным пороговым значением ΔUпор, в случае превышения порога величиной оценки порогового значения сразу принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей, в противном случае принимают предварительное решение о наличии малоразмерной воздушной цели, которой может быть малогабаритный объект с линейными размерами до 1...2 м или ложная цель, уточняют это решение на втором этапе селекции, для чего определяют для m-й цели среднее значение отраженного сигнала в пределах массива Wm по формуле
сравнивают с заранее установленным пороговым значением ΔUпор, в случае превышения порога величиной оценки порогового значения сразу принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей, в противном случае принимают предварительное решение о наличии малоразмерной воздушной цели, которой может быть малогабаритный объект с линейными размерами до 1...2 м или ложная цель, уточняют это решение на втором этапе селекции, для чего определяют для m-й цели среднее значение отраженного сигнала в пределах массива Wm по формуле
принимают значение σm за оценку эффективной площади рассеяния m-й цели, сравнивают величину σm с заранее установленным пороговым значением σпор и в случае превышения пороговой величины принимают окончательное решение об отнесении m-й цели к классу ложных целей, в противном случае принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей.
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ ПРИ ДВУХПОЗИЦИОННОМ ЗОНДИРОВАНИИ | 2002 |
|
RU2225624C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1993 |
|
RU2054693C1 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| Машина для обработки ценных бумаг | 1975 |
|
SU740165A3 |
| US 6229475 B1, 08.05.2001 | |||
| US 6753806 B1, 22.06.2004. | |||

