Предлагаемый способ относится к радиолокационной измерительной технике и может быть использован в системах посадки летательных аппаратов или при измерении скорости и направления ветра в недосягаемых (например, зараженных) районах.
Известны способы дистанционного измерения скорости и направления ветра (авт. свид. СССР №№1.173.367, 1.805.753; патенты РФ №№2.017.169, 2.249.230, 2.293.351; патенты США №№3.646.555, 4.223.309, 4.835.536, 5.523, 759, 5.724.125; патенты Японии №№2.002.214.338, 2.005.249.662, 2.005.308.754, 2.006.202.476; Король О.Г., Черняк Р.Ф. Основы радиолокации и метеорологические радиолокационных устройства, 1971, С.213-328 и другие).
Из известных способов наиболее близким к предлагаемому является способ дистанционного измерения скорости и направления ветра (патент РФ №2.017.169, G01S 13/95, 1992), который и выбран в качестве прототипа.
Сущность известного способа заключается в помещении в интересующую область пространства неоседающего отражателя, его облучений электромагнитным сигналом и приеме сигнала отраженного от него с различных пеленгов приема, период амплитудной модуляции отраженного сигнала пропорционален скорости ветра, как и доплеровский сдвиг частоты, который зависит и от косинуса угла между линией визирования отражателя, и ее положения, когда оно образует с направлением ветра известный угол β в горизонтальной плоскости, а амплитуда огибающей сигнала имеет максимальное значение, когда линия визирования составляет с направлением ветра данный угол β, при приеме сигнала для каждого i-го пеленга приема измеряют глубину амплитудной модуляции принимаемого сигнала и скорость ветра с последующим нахождением их максимальных значений, если для этих максимальных значений не один и тот же истинный пеленг отражателя γ, то повторяют указанные измерения до их совпадения, если один и тот же пеленг, то измеренную скорость ветра считают истинной и определяют направление ветра относительно северного направления геофизического меридиана по формуле α=γ-β.
При этом предполагается, что истинный пеленг γ модулятора 2 известен, он должен измеряться штатной аппаратурой летательного аппарата. Но как и каким образом - ответа нет. В этом и состоит недостаток известного способа дистанционного измерения скорости и направления ветра.
Технической задачей изобретения является расширение функциональных возможностей способа путем точного и однозначного измерения пеленга на неоседающий отражатель.
Поставленная задача решается тем, что способ дистанционного измерения скорости и направления ветра, заключающийся в соответствии с ближайшим аналогом в помещении в интересующую область пространства отражателей, движущихся под действием ветра и пропорционально его скорости, облучении отражателей электромагнитным сигналом и приеме сигнала, отраженного от них с различных i-x, где i=2, 3, …, ракурсов приема, измерении пропорционального скорости ветра доплеровского сдвига частоты и истинного пеленга отражателя γi, вычислении скорости ветра VВi и направления ветра αi, при этом в интересующую область пространства помещают неоседающий отражатель, период амплитудной модуляции отраженного от него сигнала пропорционален скорости ветра, доплеровский сдвиг частоты зависит и от косинуса угла между линией визирования отражателя, и ее положения, когда она образует с направлением ветра известный угол β в горизонтальной плоскости, а амплитуда огибающей сигнала имеет максимальное значение, когда линия визирования составляет с направлением ветpa данный угол, при приеме сигнала для каждого i-го пеленга приема измеряют глубину амплитудной модуляции mi принятого сигнала и скорость ветра VВi, определяют наибольшее значение глубины амплитудной модуляции mmaх и наибольшее значение скорости ветра VВmах, если для получения значения mmах и VВmах не один и тот же истинный пеленг отражателя γ, то повторяют вышеизложенные измерения до их совпадения, если один и тот же пеленг, то измеренную скорость ветра VBmax считают истинной и определяют направление ветра относительно северного направления географического меридиана по формуле α=γ-β, отличается от ближайшего аналога тем, что осуществляют обработку отраженного сигнала в измерительном и двух пеленгационных каналах, причем приемные антенны пеленгационных каналов размещают на концах лопастей несущего винта вертолета, а приемопередающую антенну измерительного канала устанавливают над втулкой винта вертолета, в измерительном канале принимаемый сложный сигнал с комбинированной амплитудной и частотной модуляцией преобразуют по частоте с использованием частоты ωГ гетеродина, выделяют напряжение промежуточной частоты, перемножают его с сигналами, принимаемыми в пеленгационных каналах и представляющих собой сложные сигналы с комбинированной амплитудной, частотной и фазовой модуляцией, выделяют напряжения на стабильной частоте ωГ гетеродина, представляющие собой сложные сигналы с комбинированной амплитудной и фазовой модуляцией, перемножают их между собой, выделяют амплитудомодулированное напряжение на частоте ΩВ опорного генератора, равной скорости вращения винта вертолета, и обеспечивают точное, но неоднозначное измерение пеленга γi отражателя, одновременно напряжение второго пеленгационного канала подвергают автокорреляционной обработке, выделяют амплитудномодулированное напряжение на частоте ΩB опорного генератора, равной скорости вращения винта вертолета, и обеспечивают грубое, но однозначное измерение пеленга γi отражателя, напряжение промежуточной частоты перемножают с напряжением гетеродина, выделяют напряжение, представляющее собой сложный сигнал с комбинированной амплитудной и частотной модуляцией, перемножают его с зондирующим сигналом передатчика, выделяют амплитудномодулированное напряжение на доплеровской частоте, обеспечивают измерение глубины амплитудной модуляции mi и доплеровского сдвига частоты fдi.
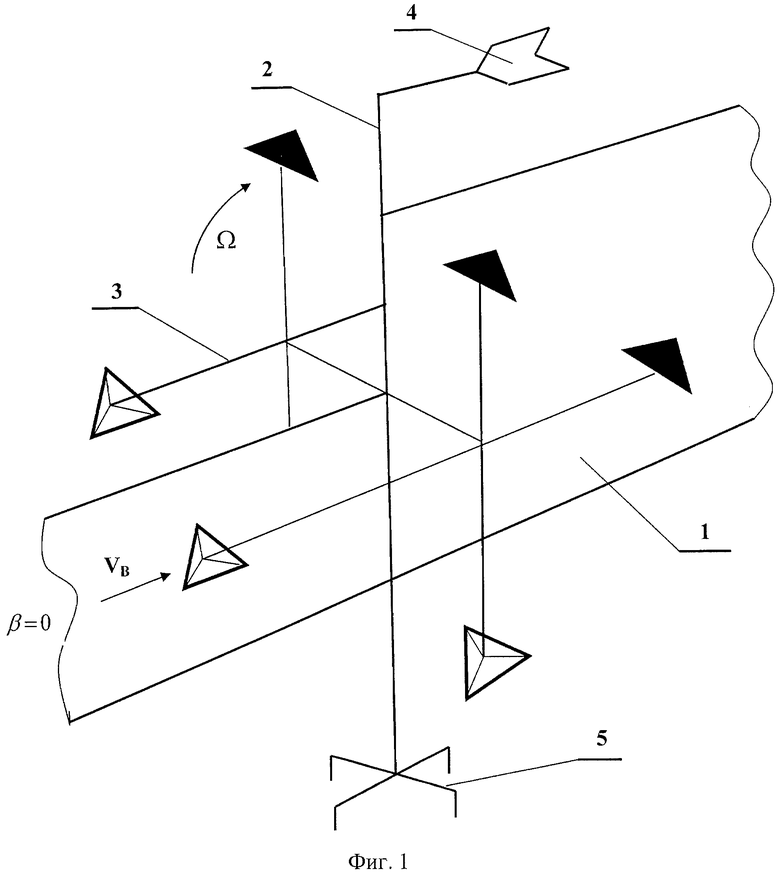
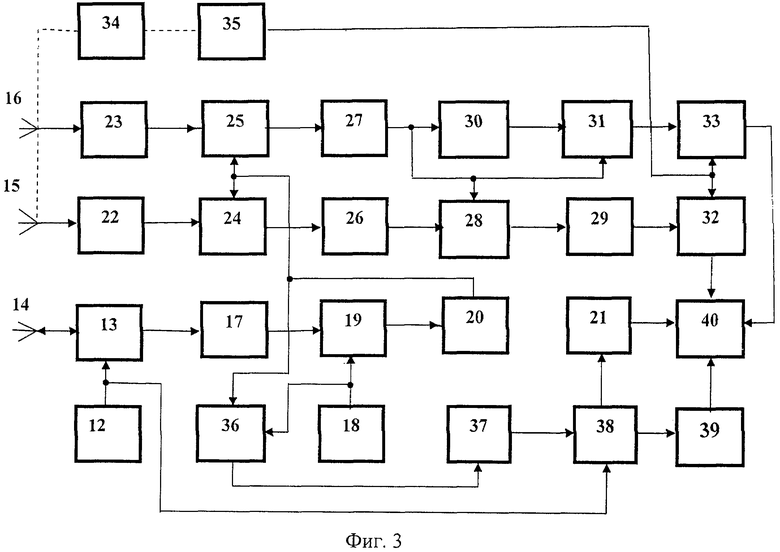
Кинематическая схема модулятора (отражателя) представлена на фиг.1. Геометрия измерений показана на фиг.2. Структурная схема устройства для реализации предлагаемого способа изображена на фиг.3.
На фиг.1-3 введены следующие обозначения: 1 - вертикальная плоскость, в которой доплеровский сдвиг и глубина амплитудной модуляции отраженного сигнала максимальна; 2 - модулятор (отражатель); 3 - система уголковых отражателей; 4 - стабилизатор плоскости вращения уголковых отражателей (флажок); 5 - опора модулятора; 6 - вертолет; 7 - траектория полета вертолета; 8 - линия визирования модулятора; 9 - местоположение вертолета, когда измерена максимальная скорость ветра; 10 - продольная строительная ось вертолета; 11 - северное направление географического меридиана.
Устройство для реализации предлагаемого способа содержит измерительный канал и два пеленгационных канала.
Измерительный канал содержит последовательно включенные передатчик 12, дуплексер 13, вход-выход которого связан с приемопередающей антенной 14, усилитель 17 высокой частоты, смеситель 19, второй вход которого соединен с выходом гетеродина 18, усилитель 20 промежуточной частоты, перемножитель 36, второй вход которого соединен с выходом гетеродина 18, узкополосный фильтр 37, перемножитель 38, второй вход которого соединен с выходом передатчика 12, измеритель 21 глубины амплитудной модуляции и процессор 40, второй вход которого через измеритель 39 доплеровской частоты соединен с вторым выходом перемножителя 38.
Каждый пеленгационный канал содержит последовательно включенные приемную антенну 15 (16), усилитель 22 (23) высокой частоты, перемножитель 24 (25), второй вход которого соединен с выходом усилителя 20 промежуточной частоты, и полосовой фильтр 26 (27). При этом к выходу первого полосового фильтра 26 последовательно подключены третий перемножитель 28, второй вход которого соединен с выходом второго полосового фильтра 27, узкополосный фильтр 29 и первый фазометр 32. К выходу второго полосового фильтра 27 последовательно подключены линия 30 задержки, фазовый детектор 31, второй вход которого соединен с выходом второго полосового фильтра 27, и второй фазометр 33. Вторые входы фазометров 32 и 33 соединены с выходом опорного генератора 35, а выходы подключены к процессору 40. Двигатель 34 кинематически связан с винтом вертолета и опорным генератором 35.
Приемопередающая антенна 14 размещена над втулкой винта вертолета, приемные антенны 15 и 16 пеленгационных каналов размещены на концах лопастей несущего винта вертолета (фиг.2).
Сущность предлагаемого способа заключается в следующем.
В интересующую область пространства помещают неоседающий отражатель 2, способный модулировать отражающий сигнал под действием ветра не только по фазе (доплеровский сдвиг), но и по амплитуде, так чтобы период амплитудной модуляции, как и доплеровский сдвиг, был пропорционален скорости ветра, доплеровский сдвиг зависит и от косинуса угла между линией визирования и ожидаемым ее положением, отклоненным от направления ветра на некоторый заведомо известный угол β в горизонтальной плоскости, и глубина амплитудной модуляции сигнала имела максимальное значение при совпадении линии визирования с ожидаемым ее положением. Отражатель-модулятор представляет собой флажок 4 и безынерционную систему уголковых отражателей 3, состоящую из симметрично соединенных по оси времени двух крестовин 5 и установленных на их концах уголковых отражателей, образующих раскрывом перпендикулярно плечам крепления по часовой или против часовой стрелки в плоскости крестовин. При этом в результате взаимодействия флажка 4 и системы уголковых отражателей 3 с вторым флажком 4 поворачивает систему уголковых отражателей 3 вокруг вертолетной оси и стабилизирует плоскость их вращения в вертолетной плоскости действия ветра, а система уголковых отражателей 3 вращается вокруг горизонтальной оси пропорционально скорости ветра.
При приеме измеряемой глубины амплитудной модуляции принятого сигнала: при осуществлении измерений с разных ракурсов приема сигнала от отражателя сравнивают измеренные по доплеровскому сдвигу скорости ветра и определяют наибольшую из них и, если для ее ракурса глубина амплитудной модуляции принятого сигнала также максимальна, выбирают соответствующий им истинный пеленг отражателя, если нет, то повторяют указанные операции, после чего по выбранному пеленгу и заданному углу между ожидаемым положением линии визирования отражателя и направлением ветра определяют направление ветра относительно северного направления геофизического меридиана.
Предлагается решить задачу в горизонтальной плоскости и определить горизонтальную составляющую вектора скорости. Эта составляющая вектора скорости является определяющей при заходе вертолета (самолета) на посадку, т.к. необходимо определить проекцию вертикальной плоскости вектора скорости ветра 1 на горизонтальную плоскость. Для этого в модуляторе 2 обеспечивают возможность вращения системы угловых отражателей 3 в вертикальной плоскости под заданным углом β к горизонтальной составляющей вектора скорости ветра.
На фиг.1 представлен частный случай, когда β=0 можно обеспечить, например, с помощью стабилизатора плоскости вращения двух крестовин с четырьмя уголковыми отражателями на их концах. На фиг.2 показан произвольный угол β.
Вертолет 6 выполняет измерение с разных ракурсов на модулятор-отражатель 2, выполняя облет его по траектории 7. При этом передатчик 12 формирует высокочастотные импульсы, которые через дуплексер 13 поступают в приемопередающую антенну 14, излучаются ею в эфир и облучают в том числе и модулятор-отражатель 2 зондирующим сигналом
 , 0≤t≤Tc,
, 0≤t≤Tc,
где Uc, ωc, φc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания.
Отраженный от модулятора-отражателя 2 сигнал улавливается антеннами 14, 15 и 16:

 ,
,
 0≤t≤Tc,
0≤t≤Tc,
где U1(t), U2(t), U3(t) - огибающие сигнала;
±ΩД - доплеровское смещение частоты;
R - радиус окружности, на которой размещены приемные антенны 15 и 16 (длина лопасти несущего винта вертолета);
λ - длина волны;
ΩB=2πR - скорость вращения приемных антенн 15 и 16 вокруг приемопередающей антенны 14 (скорость вращения винта вертолета);
γ - пеленг (азимут) на модулятор-отражатель 2.
Знаки «+» и «-» перед величиной  соответствуют диаметрально противоположным расположениям приемных антенн 15 и 16 на концах лопастей несущего винта вертолета относительно приемопередающей антенны 14, размещенной над втулкой винта вертолета.
соответствуют диаметрально противоположным расположениям приемных антенн 15 и 16 на концах лопастей несущего винта вертолета относительно приемопередающей антенны 14, размещенной над втулкой винта вертолета.
Указанные сигналы представляют собой сложные сигналы с комбинированной амплитудной, частотной и фазовой модуляцией (АМ-ЧМ-ФМ). При этом период амплитудной модуляции и доплеровский сдвиг пропорциональны скорости ветра, доплеровский сдвиг зависит также и от косинуса угла между линией визирования и ожидаемым ее положением, отклоненным от направления ветра на некоторый заведомо известный угол β в горизонтальной плоскости, а глубина амплитудной модуляции сигналов имеет максимальное значение при совпадении линии визирования с ожидаемым ее положением. Фазовая модуляция определяется параметрами вращения несущего винта. Двигатель 34 кинематически связан с винтом вертолета и опорным генератором 35.
Сигнал u1(t) с выхода приемопередающей антенны 14 через дуплексер 13 и усилитель 17 высокой частоты поступает на первый вход смесителя 19, на второй вход которого подается напряжение гетеродина 18
 .
.
На выходе смесителя 19 образуются напряжения комбинационных частот. Усилителем 20 выделяется напряжение промежуточной частоты
 0≤t≤TC,
0≤t≤TC,
где  ;
;
ωПР=ωС-ωГ - промежуточная частота;
φПР=φС-φГ;
которое подается на вторые входы перемножителей 24 и 25. На первые входы перемножителей 24 и 25 поступают принимаемые сигналы u2(t) и u3(t) с выходов усилителей 22 и 23 высокой частоты соответственно. На выходах перемножителей образуются амплитудно-фазомодулированные (АМ-ФМ) напряжения на стабильной частоте ωГ гетеродина 18:
 ,
,
 0≤t≤TC,
0≤t≤TC,
где  ;
;
 ,
,
которые выделяются полосовыми фильтрами 26 и 27 соответственно.
Следовательно, полезная информация о пеленге γ переносится на стабильную частоту ωГ гетеродина 18. Поэтому нестабильность несущей частоты, вызванная различными дестабилизирующими факторами, в том числе и доплеровским смещением частоты ±ΩД, не влияет на результат пеленгации, тем самым повышается точность определения места положения модулятора-отражателя 2. Причем величина  , входящая в состав указанных колебаний и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы сигналов, принимаемых вращающимися антеннами 15 и 16 относительно фазы сигнала, принимаемого неподвижной антенной 14.
, входящая в состав указанных колебаний и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы сигналов, принимаемых вращающимися антеннами 15 и 16 относительно фазы сигнала, принимаемого неподвижной антенной 14.
Пеленгаторное устройство тем чувствительнее к изменению угла γ, чем больше относительный размер измерительной базы R/λ. Однако с ростом R/λ уменьшается значение угловой координаты γ, при котором разность фаз превосходит значение 2π, т.е. наступает неоднозначность отсчета угла γ.
Следовательно, при  наступает неоднозначность отсчета угла γ. Устранение указанной неоднозначности путем уменьшения соотношения R/λ обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы.
наступает неоднозначность отсчета угла γ. Устранение указанной неоднозначности путем уменьшения соотношения R/λ обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы.
Кроме того, в диапазон метровых и особенно дециметровых волн брать малое значение R/λ часто не удается из-за конструктивных соображений.
Для повышения точности пеленгации модулятора-отражателя 2 в горизонтальной плоскости приемные антенны 15 и 16 размещаются на концах лопастей несущего винта вертолета. Смешение сигналов от двух диаметрально противоположных приемных антенн 15 и 16, находящихся на одинаковом расстоянии R от оси вращения несущего винта, вызывают фазовую модуляцию, получаемую с помощью одной приемной антенны, вращающейся по кругу, радиус R1 которого в два раза больше (R1=2R).
Действительно, на выходе перемножителя 28 образуется гармоническое напряжение
 , 0≤t≤TC,
, 0≤t≤TC,
где  ,
,
с индексом фазовой модуляции  R1=2R, которое выделяется узкополосным фильтром 29 и поступает на первый вход первого фазометра 32, на второй вход которого подается напряжение опорного генератора 35
R1=2R, которое выделяется узкополосным фильтром 29 и поступает на первый вход первого фазометра 32, на второй вход которого подается напряжение опорного генератора 35
 .
.
Фазометр 32 обеспечивает точное, но неоднозначное измерение угловой координаты γ.
Для устранения возникающей при этом неоднозначности отсчета угла γ необходимо уменьшить индекс фазовой модуляции без уменьшения отношения R/λ. Это достигается автокорреляционной обработкой с использованием автокоррелятора, состоящего из линии задержки 30 и фазового детектора 31, что эквивалентно уменьшению индекса фазовой модуляции до величины
 ,
,
где d1<R.
На выходе автокоррелятора образуется напряжение
 , 0≤t≤TC,
, 0≤t≤TC,
с индексом фазовой модуляции Δφm2, которое поступает на первый вход фазометра 32, на второй вход поступает напряжение uo(t) опорного генератора 35. Фазометр 33 обеспечивает грубое, но однозначное измерение угла γ.
Измеренные значения пеленга γ модулятора-отражателя 2 поступают в процессор 40.
Напряжение uПР(t) с выхода усилителя 20 промежуточной частоты одновременно поступает на первый вход перемножителя 36, на второй вход которого подается напряжение uГ(t) гетеродина 18. На выходе перемножителя 36 образуется напряжение
 0≤t≤TС,
0≤t≤TС,
где  ,
,
которое выделяется узкополосным фильтром 37 и поступает на первый вход перемножителя 38, на второй вход которого подается напряжение uc(t) с выхода передатчика 12 (зондирующий сигнал). На выходе перемножителя 38 образуется напряжение
 , 0≤t≤TC,
, 0≤t≤TC,
которое поступает на вход измерителя 39 доплеровской частоты. Причем величина и знак доплеровской частоты определяют величину и направление радиальной скорости. Напряжение u9(t) одновременно поступает на вход измерителя 21 глубины амплитудной модуляции. Последний обеспечивает измерение
 ,
,
где mi - глубина амплитудной модуляции сигнала, принимаемого с i-го ракурса;
Umax, Umin - максимальное и минимальное значения амплитуды сигнала, принимаемого с i-го ракурса.
Измеренные значения mi и fДi поступают в процессор 40.
Когда угол между линией визирования 8 и вектором скорости ветра 
 станет равным β (положение вертолета 6 в точке 9), измеренное значение скорости ветра будет максимальным. В этот момент доплеровский сдвиг частоты будет максимальным, а также максимальной будет и глубина амплитудной модуляции принятого сигнала (определяется диаграммой переотражения уголковых отражателей).
станет равным β (положение вертолета 6 в точке 9), измеренное значение скорости ветра будет максимальным. В этот момент доплеровский сдвиг частоты будет максимальным, а также максимальной будет и глубина амплитудной модуляции принятого сигнала (определяется диаграммой переотражения уголковых отражателей).
Измеренный доплеровский сдвиг частоты отраженного от модулятора сигнала связан со скоростью ветра следующей зависимостью:
 ,
,
где fДj - доплеровский сдвиг, вносимый каждым j уголковым отражателем;
V - линейная скорость вращения уголкового отражателя, равная скорости ветра;
λ - длина волны сигнала;
φ - угол между проекцией линии визирования на плоскость вращения и направлением линейной скорости вращения уголкового отражателя;
ψ - угол в горизонтальной плоскости между линией визирования и направлением ветра.
Существующая амплитудная модуляция с периодом
 ,
,
где RB - радиус вращения уголкового отражателя;
n=4 - число плеч системы уголковых отражателей.
Измеряют доплеровский сдвиг частоты fДi и в процессоре 40 вычисляют по нему скорость ветра в радиальном направлении
 ,
,
измеряют истинный пеленг отражателя γi и повторяют вышеизложенные операции с других i-x ракурсов приема сигнала от модулятора-отражателя 2, при этом сравнивают вычисленные по доплеровскому сдвигу fДi скорости ветра и выбирают наибольшую из них Vmax и, если для нее глубина амплитудной модуляции также максимальна, выбирают соответствующий им истинный пеленг отражателя, если нет, то повторяют вышеуказанные операции, после чего по выбранному пеленгу и заданному углу между ожидаемым положением линии визирования отражателя и направлением ветра β определяют направление ветра относительно северного направления географического меридиана:
α=γ-β.
Обеспечение степени свободы вращения уголковых отражателей в вертикальной плоскости под заданным углом β к горизонтальной составляющей вектора скорости ветра, измерение глубины амплитудной модуляции, измерение ракурса на модулятор-отражатель при измерении скорости ветра, выделение максимальной скорости ветра и максимальной глубины амплитудной модуляции позволяют определить по соответствующему им ракурсу (истинному пеленгу) направление вектора скорости.
Таким образом, предлагаемый способ дистанционного измерения скорости и направления ветра по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает точное и однозначное измерение пеленга на модулятор-отражатель. Это достигается размещением антенн пеленгатора на лопастях несущего винта вертолета, которые реализуют частотно-фазовый метод пеленгации. При этом точность пеленгации достигается размещением приемных антенн на противоположных лопастях несущего винта вертолета, что увеличивает измерительную базу. Возникающая при этом неоднозначность устраняется использованием эффекта Доплера и автокорреляционной обработкой отраженных сигналов, что позволяет снизить индекс фазовой модуляции.
Тем самым функциональные возможности способа расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 1992 |
|
RU2017169C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2254262C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537092C2 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2009 |
|
RU2419814C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2011 |
|
RU2458815C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2000 |
|
RU2177437C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
Предлагаемый способ относится к радиолокационной измерительной технике и может быть использован в системах посадки летательных аппаратов или при измерении скорости и направления ветра в недосягаемых (например, зараженных) районах. Техническим результатом изобретения является повышение точности и однозначности измерения пеленга на неоседающий отражатель. Отражатель содержит модулятор-отражатель 2, систему 3 уголковых отражателей, стабилизатор 4 плоскости вращения уголковых отражателей (флажок), опору модулятора 5. Устройство определения скорости и направления ветра, размещенное на вертолете 6, содержит передатчик 12, дуплексер 13, приемопередающую антенну 14, приемные антенны 15 и 16, усилители 17, 22 и 23 высокой частоты, гетеродин 18, смеситель 19, усилитель 20 промежуточной частоты, измеритель 21 глубины амплитудной модуляции, перемножители 24, 25, 28, 36 и 38, полосовые фильтры 26 и 27, узкополосные фильтры 29 и 37, линию задержки 30, фазовый детектор 31, фазометр 32 и 33, опорный генератор 35, кинематически связанный с двигателем вертолета 34, измеритель 39 доплеровской частоты и процессор 40. 3 ил.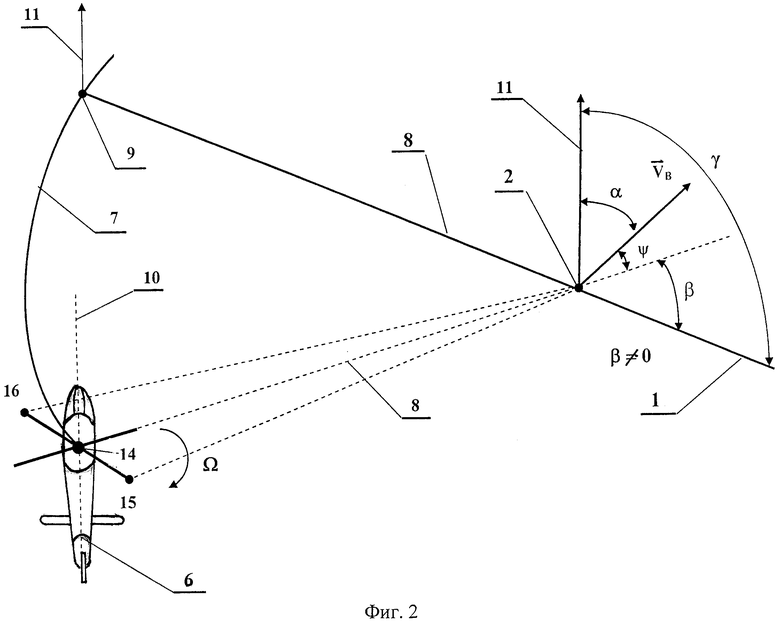
Способ дистанционного измерения скорости и направления ветра, заключающийся в помещении в интересующуюся область пространства отражателей, движущихся под действием ветра и пропорционально его скорости, облучении отражателей электромагнитным сигналом и приеме сигнала, отражающего от них с различных i-x, где i=2, 3, …, ракурсов приема, измерении пропорционального скорости ветра доплеровского сдвига частоты fдi и истинного пеленга отражателя γi, вычислении скорости ветра Vвi и направления ветра α, при этом в интересующую область пространства помещают неоседающий отражатель, период амплитудной модуляции отраженного от него сигнала пропорционален скорости ветра, доплеровский сдвиг частоты зависит и от косинуса угла между линией визирования отражателя и ее положением, когда она образует с направлением ветра известный угол β в горизонтальной плоскости, а амплитуда огибающей сигнала имеет максимальное значение, когда линия визирования составляет с направлением ветра данный угол β, при приеме сигнала для каждого i-го пеленга приема измеряют глубину амплитудной модуляции mi принятого сигнала и скорость ветра Vвi, определяют наибольшее значение глубины амплитудной модуляции mmах и наибольшее значение скорости ветра Vвmax, если для полученных значений mmах и Vвmах не один и тот же истинный пеленг отражателя γ, то повторяют вышеизложенные измерения до их совпадения, если один и тот же пеленг, то измеренную скорость ветра Vвmах считают истинной и определяют направление ветра относительно северного направления геофизического меридиана по формуле α=γ-β, отличающийся тем, что осуществляют обработку отраженного сигнала в измерительном и двух пеленгационных каналах, причем приемные антенны пеленгационных каналов размещают на концах лопастей несущего винта вертолета, а приемопередающую антенну измерительного канала устанавливают над втулкой винта вертолета, в измерительном канале принимаемый сложный сигнал с комбинированной амплитудной и частотной модуляцией преобразуют по частоте с использованием частоты ωг гетеродина, выделяют напряжение промежуточной частоты, перемножают его с сигналами, принимаемыми в пеленгационных каналах и представляющими собой сложные сигналы с комбинированной амплитудной, частотной и фазовой модуляцией, выделяют напряжения на стабильной частоте ωг гетеродина, представляющие собой сложные сигналы с комбинированной амплитудной и фазовой модуляцией, перемножают их между собой, выделяют амплитудно-модулированное напряжение на частоте Ωв опорного генератора, равной скорости вращения винта вертолета, и обеспечивают точное, но неоднозначное измерение пеленга γi отражателя, одновременно напряжение второго пеленгационного канала подвергают автокорреляционной обработке, выделяют амплитудно-модулированное напряжение на частоте Ωв опорного генератора, равной скорости вращения винта вертолета, и обеспечивают грубое, но однозначное измерение пеленга γi отражателя, напряжение промежуточной частоты перемножают с напряжением гетеродина, выделяют напряжение, представляющее собой сложный сигнал с комбинированной амплитудной и частотной модуляцией, перемножают его с зондирующим сигналом передатчика, выделяют амплитудно-модулированное напряжение на доплеровской частоте, обеспечивают измерение глубины амплитудной модуляции mi и доплеровского сдвига частоты fдi.
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 1992 |
|
RU2017169C1 |
| SU 1683417 A1, 10.08.1996 | |||
| ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ ВЕТРА ДЛЯ ОБНАРУЖИТЕЛЯ СДВИГА ВЕТРА | 2008 |
|
RU2400769C2 |
| JP 2004212274 A, 29.07.2004 | |||
| JP 55140181 A, 01.11.1980. | |||

