Изобретение касается управления космическими объектами КО и может быть использовано при развертывании и Функционировании в космическом пространстве системы объектов, связанных с помощью гибкого элемента (ГЭ).
Целью изобретения является повышение эффективности управления путем снижения затрат бортовых ресурсов на передачу информации.
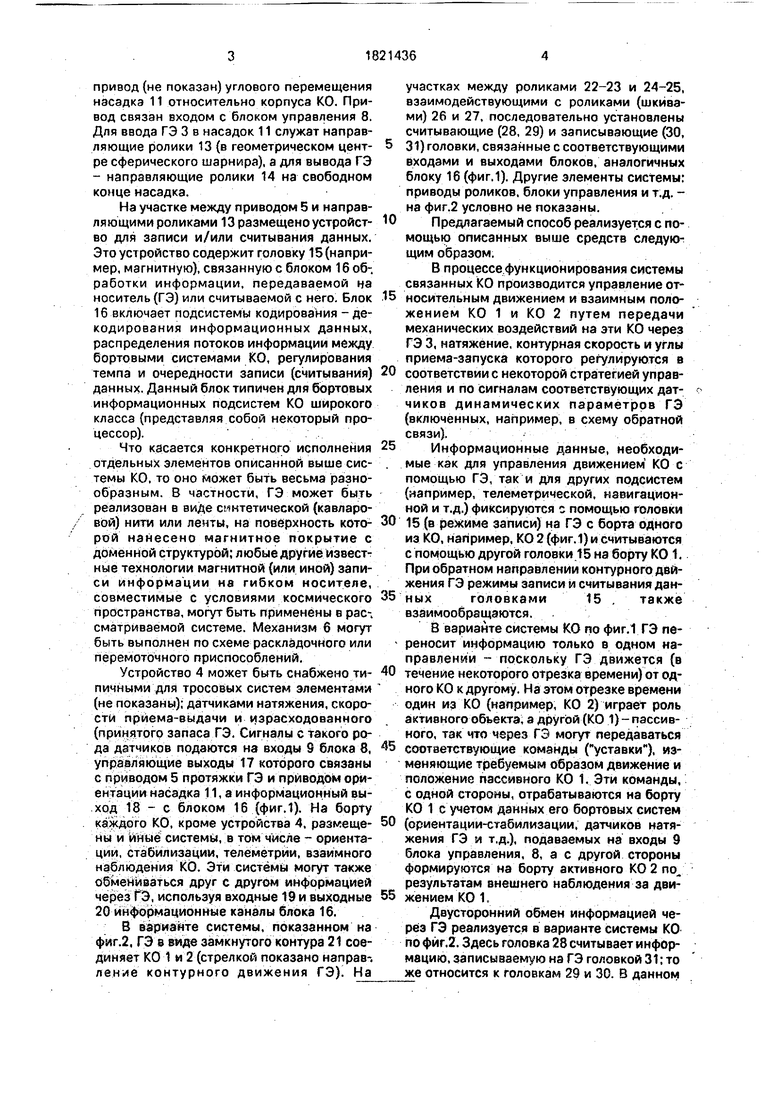
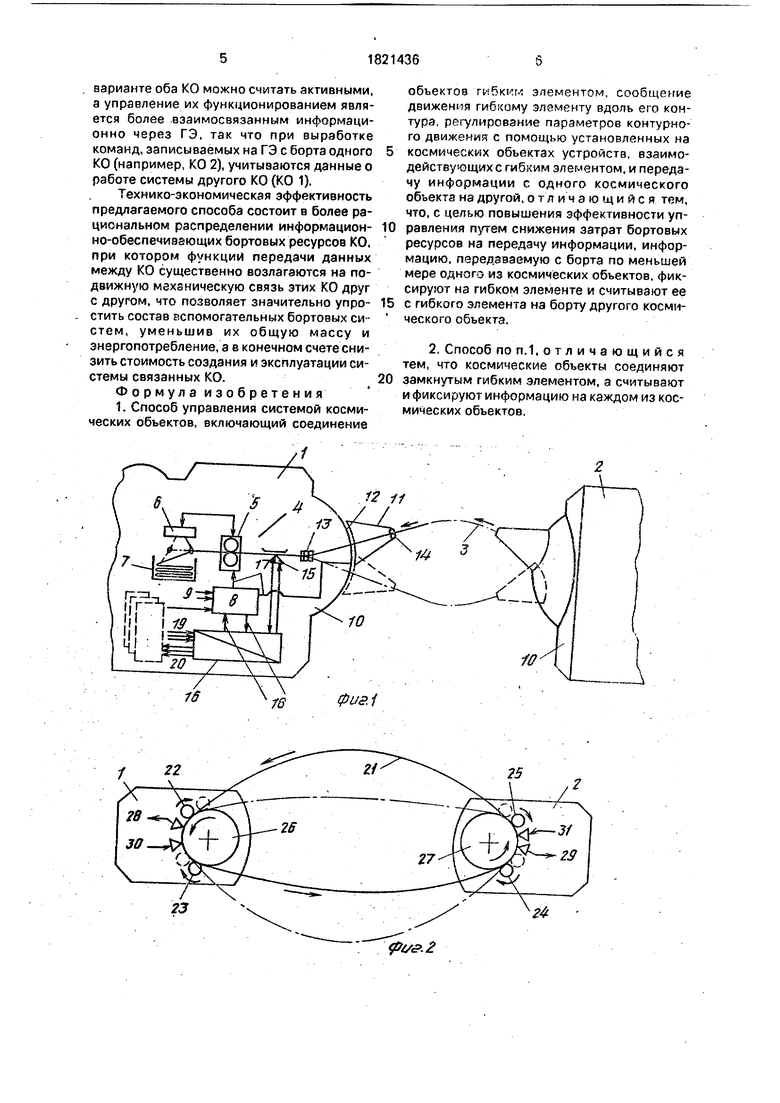
На фиг. 1 дан пример реализации способа для системы КО, связанных незамкнутым контуром ГЭ; на фиг.2 - пример реализации способа в системе КО, соединенных ГЭ в виде замкнутого контура.
Согласно одному из вариантов (фиг.1) система содержит КО 1, связанный с КО 2 при помощи ГЭ 3. Для создания натяжения
и сообщения ГЭ контурной скорости (в направлении, показанном стрелкой) служит установленные на каждом КО устройства 4, взаимодействующие с ГЭ (на фиг. 1 показано одно из этих устройств). Устройство 4 содержит привод 5 протяжки ГЭ (скоростные ролики), механизм б упорядоченной укладки (выдачи) запаса ГЭ в хранилище (из хранилища) 7 и блок управления 8 устройством 4, на входы 9 которого поступает информация о параметрах контурного движения ГЭ и различные управляющие команды. Кроме того, устройство 4 содержит средства 10 для регулирования угла приема-запуска ГЭ, выполненное в виде направляющего насадка 11, образующего с корпусом КО шарнирную (например, сферическую) пару 12, в которой предусмотрен соответствующий
00
м Ј
со
с
31821436 4
привод (не показан) углового перемещенияучастках между роликами 22-23 и 24-25,
нэсадкэ 11 относительно корпуса КО. При-взаимодействующими с роликами (шкйвавод связан входом с блоком управления 8.ми) 26 и 27, последовательно установлены
Для ввода ГЭ 3 в насадок 11 служат направ-считывающие (28, 29) и записывающие (30,
ляющие ролики 13 (в геометрическом цент-5 Заголовки, связанные с соответствующими
ре сферического шарнира), а для вывода ГЭвходами и выходами блоков, аналогичных
- направляющие ролики 14 на свободномблоку 16 (фиг. 1). Другие элементы системы:
конце насадка.приводы роликов, блоки управления и т.д. На участке между приводом 5 и направ-на фиг.2 условно не показаны,
ляющими роликами 13 размещено устройст-Ю Предлагаемый способ реализуется с пово для записи и/или считывания данных.мощью описанных выше средств следуюЭто устройство содержит головку 15 (напри-щим образом.
мер, магнитную), связанную с блоком 16 об-В процессе функционирования системы работки информации, передаваемой насвязанных КО производится управление от- носитель (ГЭ) или считываемой с него. Блок15 носительным движением и взаимным поло- 16 включает подсистемы кодирования-де-жением КО 1 и КО 2 путем передачи кодирования информационных данных,механических воздействий на эти КО через распределения потоков информации междуГЭ 3, натяжение, контурная скорость и углы бортовыми системами КО, регулированияприема-запуска которого регулируются в темпа и очередности записи (считывания)20 соответствии с некоторой стратегией управ- данных. Данный блок типичен для бортовыхления и по сигналам соответствующих дат- информационных подсистем КО широкогочиков динамических параметров ГЭ класса (представляя собой некоторый про-(включённых, например, в схему обратной цессор).связи).
Что касается конкретного исполнения25 Информационные данные, необходиотдельных элементов описанной выше сие-. мые как для управления движением КО с
темы КО, то оно может быть весьма разно-помощью ГЭ, так и для других подсистем
образным. В частности, ГЭ может быть(например, телеметрической, навигационреализован в виде синтетической (кавларо-ной и т.д.) фиксируются о помощью головки
вой) нити или ленты, на поверхность кото-30 15 (в режиме записи) на ГЭ с борта одного
рой нанесено магнитное покрытие сиз КО, например, КО 2 (фиг. 1)и считываются
ддменной структурой; любые другие извест-с помощью другой головки 15 на борту КО.1.
ные технологии магнитной (или иной) запи-При обратном направлении контурного двйси информации на гибком носителе,жения ГЭ режимы записи и считывания дансовместимые с условиями космического35 ных головками 15 , также
пространства, могут быть применены в рас-4взаимообращаются.
сматриваемой системе. Механизм 6 могутВ варианте системы КО по фиг.1 ГЭ пебыть выполнен по схеме раскладочного или реносит информацию только в одном наперемотЬчного приспособлений.правлении - поскольку ГЭ движется (в
Устройство 4 может быть снабжено ти-40 течение некоторого отрезка времени) от одпичными для тросовых систем элементами ного КО к другому. На этом отрезке времени
(не показаны); датчиками натяжения, скоро-один из КО (например, КО 2) играет роль
стй приема-выдачи и израсходованногоактивного объекта; а другой (КО 1)-пассив(принятого запаса ГЭ. Сигналы с такого ро-ного, так что через ГЭ могут передаваться
да датчиков подаются на входы 9 блока 8,45 соответствующие команды (уставки), изупрааляющие выходы 17 которого связаныменяющие требуемым образом движение и
с приводом 5 протяжки ГЭ и приводом ори-положение пассивного КО 1. Эти команды,
ентации насадка 11, а информационный вы-с одной стороны, отрабатываются на борту
ход 18 - с блоком 16 (фиг.1). На бортуКО 1 с учетом данных его бортовых систем
каждого КО, кроме устройства 4, рэзмеще-50 (ориентации-стабилизации, датчиков натяны и йНыё системы, в том числе - ориента-жения ГЭ и т.д.), подаваемых на входы 9
ции, стабилизации, телеметрии, взаимногоблока управления, 8, а с другой стороны
наблюдения КО. Эти системы могут такжеформируются на борту активного КО 2 по,
обмениваться друг с другом информациейрезультатам внешнего наблюдения за двичерезГЭ, используя входные 19 и выходные55 жением КО 1.
20 информационные каналы блока 16.Двусторонний обмен информацией чеВ вариайте системы, показанном нареэ ГЭ реализуется в варианте системы КО
фиг.2, ГЭ а виде замкнутого контура 21 сое-по фйг.2. Здесь головка 28 считывает инфординяет КО 1 и 2 (стрелкой показано направ-.мацию, записываемую на ГЭ головкой 31; то
ление контурного движения ГЭ). Наже относится к головкам 29 и 30. В данном
варианте оба КО можно считать активными, а управление их функционированием является более .взаимосвязанным информационно через ГЭ, так что при выработке команд, записываемых на ГЭ с борта одного КО (например, КО 2), учитываются данные о работе системы другого КО (КО 1).
Технико-экономическая эффективность предлагаемого способа состоит в более рациональном распределении информационно-обеспечивающих бортовых ресурсов КО, при котором функций передачи данных между КО существенно возлагаются на подвижную механическую связь этих КО друг с другом, что позволяет значительно упростить состав вспомогательных бортовых систем, уменьшив их общую массу и энергопотребление, а в конечном счете снизить стоимость создания и эксплуатации системы связанных КО.
Формул а изобретени я 1. Способ управления системой космических объектов, включающий соединение
объектов гибким элементом, сообщение движения гибкому элементу вдоль его контура, регулирование параметров контурного движения с помощью установленных на
5 космических объектах устройств, взаимодействующих с гибким элементом, и передачу информации с одного космического объекта на другой, о т л и ч а ю щ и и с я тем, что, с целью повышения эффективности уп0 равления путем снижения затрат бортовых ресурсов на передачу информации, информацию, передаваемую с борта по меньшей мере одного из космических объектов, фиксируют на гибком элементе и считывают ее
5 с гибкого элемента на борту другого косми ческого объекта.
2. Способ поп.1,отличающийся тем, что космические объекты соединяют 0 замкнутым гибким элементом, а считывают и фиксируют информацию на каждом из космических объектов.
Изобретение относится к управлению космическими объектами и может быть использовано при развертывании и функционировании в космическом пространстве системы объектов, связанных с помощью гибкого элемента. Целью изобретения является повышение эффективности управления путем снижения затрат бортовых ресурсов на передачу информации. Информацию, передаваемую с борта по меньшей мере одного из космических объектов, фиксируют на гибком элементе и считывают ее с гибкого элемента на борту другого космического объекта, космического объекта соединяют замкнутым гибким элементом, а считывают и фиксируют информацию на-каждом из космических объектов. 1 з.п. ф-лы, 2 ил.
г
&t/&2
| F.Bevllacgua et al/ Tethered space elevator possible applications and demonstrative experiment//Paper at IInd Int.Conf | |||
| on Tethers In space, Venice, Italy, OKT | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Андреев А | |||
| В | |||
| Перспективы применения контурного движения нити в орбитальных тросовых системах | |||
| Сб | |||
| Механика трансформируемых систем, ЦНТИ Информсвязь, 1990 | |||
| Прибор для опиловки лекал | 1917 |
|
SU1711A1 |
