Изобретение касается устройства управления для гидравлических устройств шагающей крепи в подземных выработках, по меньшей мере, с одним прибором электрогидравлического устройства управления с электрической схемой управления для электромагнитов, управляющих гидравлическими клапанами, клавиатурой, связанной со схемой управления, со связанным со схемой управления индикаторным дисплеем, а также с двумя многополюсными штеккерными (штепсельными) разъемами для соединения управляющих приборов всякий раз со смежными приборами, причем штеккерные разъемы приборов управления внутри прибора управления соединены между собой и также со схемой управления путем электрически проводящих соединений.
В крепи забоя подземных выработок обычно применяют ряд устанавливаемых одно рядом с другим гидравлических устройств шагающей крепи, т.е., так называемых щитовых стоек крепи.
Каждое устройство шагающей крепи имеет управляющий прибор для управления электромагнитами, которые со своей стороны управляют гидравлическими клапанами, который электрически соединен всякий раз с приборами управления соседних устройств крепи, так что образована цепь управления, которая в большинстве случаев через собирательный прибор, так называемую параметрическую станцию, соединена с находящимся на поверхности центральным прибором. Таким образом, в числе прочего возможно осуществлять, так называемое, управление соседними устройствами крепи или также направленное управление определенных устройств крепи с центрального прибора.
Известные приборы управления в отношении их конструктивного и схемного построения заслуживают улучшения, т.к. с одной стороны все внутренние приводные соединения состоят из отдельных проводов, собранных в кабельные жгуты, вследствие чего очень высоки затраты при изготовлении, соответственно при монтаже так же, как при работах по испытаниям и проверке, что является недостатком. С другой стороны, известные приборы управления при выполнении функций обслуживания плохо приспособлены для манипулирования. Далее электромагниты обычно установлены внутри прибора управления, причем они воздействуют механически на установленные снаружи клапаны, в области которых неподвижно смонтирован прибор управления. Это является решающим недостатком, поскольку при замене прибора неизбежны длительные наладочные работы для обеспечения точного переключения гидравлических клапанов.
Целью изобретения является повышение надежности и упрощение изготовления и обслуживания.
Достигается это тем, что в устройстве управления для гидравлических устройств шагающей крепи в подземных горных разработках, содержащем центральный блок управления, расположенный вне лавы и через станцию сбора параметров, соединенный с помощью штеккерных разъемов с приборами управления, включающими процессор и блок клавиатуры и индикации, каждый прибор управления электрически соединен с блоком управления магнитами, приводящими в действие гидравлические клапаны, процессор, блок клавиатуры и индикации и блок управления магнитами выполнены на отдельных платах и соединены между собой общей шиной и, по крайней мере, один из указанных блоков соединен гибкой платой со штеккерными разъемами, кроме того, оно снабжено блоком с функциями параметризации, который подключен к сети дистанционной загрузки интерфейса, при этом указанный блок укреплен на фронтальной панели корпуса и через штеккерные разъемы соединен с процессором прибора управления.
На фиг. 1 дана принципиальная блок-схема управляющего устройства; на фиг. 2 - то же, вид спереди; на фиг.3 - вид по стрелке А на фиг.2; на фиг.4 - разрез по Б-Б на фиг.3; на фиг.5 - вид прибора по стрелке В на фиг.2; на фиг.6 - разрез по Г-Г на фиг.2.
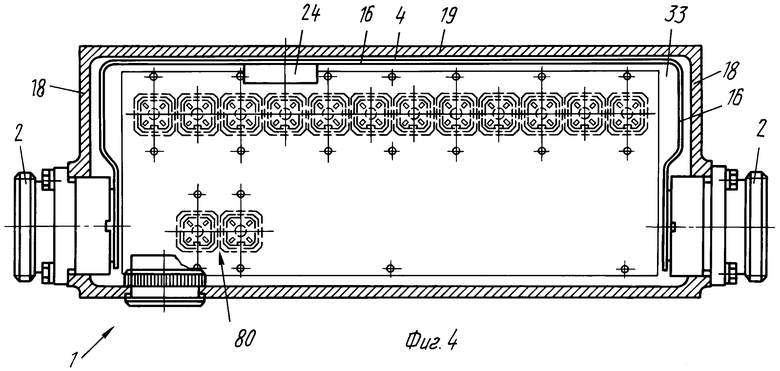
На представленной (фиг.1) блок-схеме устройства показан только один управляющий прибор 1, однако обычно несколько управляющих приборов 1, и именно для каждого крепежного устройства свой прибор управления 1 электрически соединен последовательно один за другим в цепь управления. Для этого прибор управления имеет два многополюсных штеккерных разъема 2 (см. также фиг.2 по 6), к которым могут быть подключены не изображенные соединительные кабели. Штеккерные разъемы 2, которые могут быть выполнены в виде контактных штырьков или гнезд внутри прибора управления 1, соединены между собой, а также с электрической схемой управления 3 по электрическим соединительным линиям 4. Эта схема управления 3 служит для электрического управления электромагнитами 5, которые со своей стороны для проведения определенных гидравлических функций крепления таких, как посадка, выбойка крепи, шагание и т.д., механически взаимодействуют соответствующими гидравлическими клапанами 6.
Прибор управления 1 имеет клавиатуру команд 7, которая электрически соединена со схемой управления 3 и к которой подключен индицирующий дисплей 8, который предпочтительно выполнен в виде жидкокристаллического дисплея открытого незашифрованного текста.
Схема управления 3 состоит по существу из трех блоков, блока управления 9 с процессором 10, блока клавиатуры и индикации 11, также блока 12 управления магнитами, причем эти три блока выгодным образом соединены между собой через общую шину 13 (порт-шину). Блоки 9, 11, 12 сообщаются исключительно через эту шину 13, причем блок управления 9 с процессором 10 осуществляют управление блоками 11, 12, также осуществляют обмен данными между соседними приборами управления 1. Каждый из трех блоков 9, 11, 12 образован на отдельной печатной плате 14 процессора (фиг.3 и 6) на печатной плате клавиатуры и индикации (фиг.3, 4, 6).
Линии соединений 4 между штеккерными разъемами 2 приборов управления (фиг. 1) образованы, по меньшей мере, одной (на фиг.4) ленточной, гибкой печатной платой 16, которая посредством поперечной плоской линии соединений 17 (фиг.1 и 6) соединена с одним из трех блоков, и именно предпочтительно с блоком управления 9. Далее особенно выгодно, если соединение 4 между обоими штеккерными разъемами 2 вместо только одной предпочтительно состоит из нескольких параллельно лежащих одна на другой ленточных, гибких печатных плат 16. За счет применения нескольких, например, двух или трех гибких печатных плат 16 достигается уменьшение сопротивления (повышение проводимости) и этим уменьшение падения напряжения на гибких печатных платах 16, вследствие чего выгодным образом повышается надежность передачи данных. Целесообразным образом одна из гибких печатных плат 16 имеет большое число проводящих путей для передачи сигналов данных и также для подвода напряжения. Эта печатная плата 16 затем через поперечное соединение плоских соединительных линий 17 соединена с печатной платой управления 14.
Обе другие печатные платы 16 имеют только два проводящих слоя и служат таким образом для передачи напряжения к следующему управляющему прибору с малыми потерями. Соответствующие соединения между печатными платами 16 осуществляются путем пайки к штифту с наконечником для припайки штеккерного разъема 2.
Штеккерный разъем 2 управляющих приборов установлен в одной из двух противолежащих боковых стенок 18 корпуса управляющего прибора 1, а гибкая (гибкие) печатная плата (печатные платы) 16 проходит (проходят) параллельно вдоль боковой стенки 18 и верхней стенки 19 корпуса очень экономно в отношении занимаемого места.
Соединяющая три блока 9, 11, 12 или три печатные платы 14, 15, 20, шина 13 образована из одного или нескольких, например 20-ти полюсных плоских ленточных кабелей, которые через штеккерные разъемы 2 подключены к блокам 9, 11, 12 или печатным платам 14, 15, 20, как видно на фиг.3.
Поперечное соединение плоскими линиями 17 состоит также из плоского ленточного кабеля 22, который одним концом через штеккерный разъем 2 соединен с блоком 9 или печатной платой 14 и другим концом - через штеккер подключения 24, по меньшей мере, с одной из гибких печатных плат 16 в области между штеккерными разъемами 2.
Блок 12 управления магнитами по электрическим проводящим соединениям 25 (на фиг. 1 показаны только схематически) соединены с электромагнитами 5. Причем электромагниты 5 установлены вне прибора управления 1 и здесь встроены вместе с гидравлическими клапанами 6 в так называемый гидравлический блок. Посредством этого выгодного выполнения прибор управления 1 может быть легко и быстро заменен, поскольку не требуются затраты времени на наладочные работы по механическим соединениям между электромагнитами 5 и гидравлическими клапанами 6, а требуется только переставить проводящие соединения 25. Этот микропроцессор 10 представляет собой ядро блока 9 управления и содержит все функции обслуживания электрогидравлического управления исключительно компактным образом.
Блок управления 9 с процессором 10 содержит модуль передачи данных 26 (ДОАРТ), по меньшей мере, одно запоминающее устройство (ЗУ) данных 27 и/или схему 28 защиты прибора (регулирования напряжения).
На фиг.1 далее схематически показано, что блок 11 клавиатуры и индикации имеет клавиатуру 7 команд, которая состоит из клавишей команд 29, внутри которого установлены индицирующие светодиоды 30 (также фиг.3).
Блок 12 управления магнитами имеет элемент 31 включения электромагнитов 5 и концевой выключатель или чувствительный элемент опроса 32. Посредством элемента 31 включаются электромагниты 5 повышенным напряжением, а затем напряжение снижается до минимального напряжения удерживания, благодаря чему значительно снижается расход энергии.
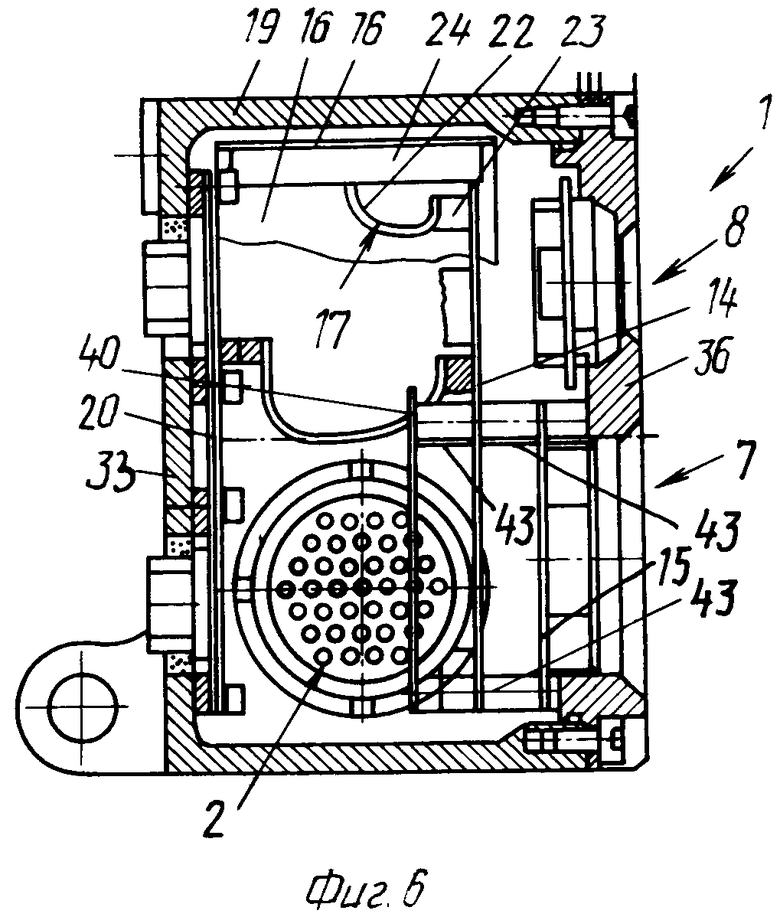
Согласно фиг.3 и 6, блок 12 или соответствующая печатная плата 20 укреплена на задней стенке 33 корпуса прибора управления 1. Концевые выключатели 34 или датчики положений контролируют давление, положение гидроцилиндра и им подобные и передают эти величины по линии связи 35 на схему 32 опроса блока 12 управления магнитами.
Блок управления 9 с процессором 10 и блок 11 клавиатуры и индикации или соответствующие печатные платы 14 и 15 укреплены на фронтальной панели 36 прибора управления 1. Эта фронтальная панель 36 прибора управления 1 образует крышку корпуса, уплотненную относительно корпуса прибора управления 1.
На фронтальной панели 36 прибора управления 1 находится жидкокристаллический дисплей, подключенный к блоку управления 9 с процессором 10, инициирующий дисплей 8, на котором открытым текстом может индицироваться информация о состоянии гидравлических устройств: блокирующий выключатель 37 вместе с печатной платой 38 через плоский ленточный кабель 39 соединен с блоком управления 9 с процессором, и именно со схемой 28 защиты прибора (регулирования напряжения) (фиг. 1 и 2). Блокирующий выключатель 37 имеет важное значение в отношении техники безопасности, т.к. он согласно аппаратному обеспечению подключает магниты в управляемом приборе и препятствует управлению прибором управления от соседних блоков.
Кроме трех блоков 9, 11, 12 предусмотрен еще дополнительный блок с функциями параметризации (подключение сети, дистанционная загрузка, интерфейс, шина датчиков и им подобных).
Этот дополнительный блок образован на отдельной, укрепленной на фронтальной панели 36 печатной платы 40 и через самоконтактирующийся штеккерный разъем 41 и дальнейший плоский ленточный кабель 42 соединен с блоком управления 9 с процессором или печатной платой 14, как это лучше всего можно видеть на фиг.3. Альтернативно этому возможно также дополнительно печатную плату 40 через штеккерные разъемы 41 непосредственно, т.е. без плоского ленточного кабеля 42 вставить на печатную плату 14.
Как показано на фиг.3 и 6, все печатные платы 15, 14 и 40, которые прикреплены к фронтальной панели 36, могут быть посредством дистанционного держателя 43 закреплены в параллельном друг другу положении.



Сущность изобретения заключается в том, что устройство управления для гидравлических устройств шагающей крепи содержит два штеккерных разъема 2 схемы управления 3, соединительную линию 4, блок управления 9 с процессором 10, блок клавиатуры магнитами 12, негативную плату клавиатуры и индикации, общую шину 13, отличается выгодным конструктивным выполнением блока управления, удобной компоновкой и рациональным размещением. 1 з.п. ф-лы, 6 ил.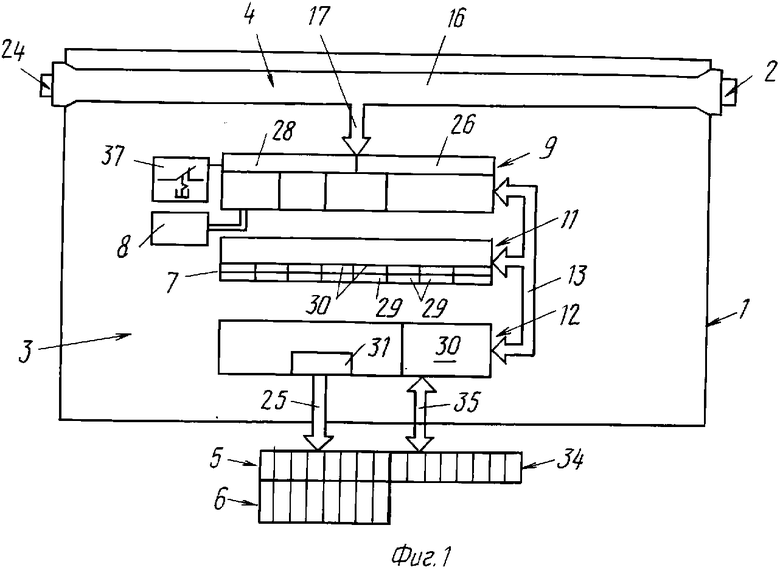
| Патент ФРГ N 3715593, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
