Изобретение относится к измерительной технике и может быть использовано для определения координат при наземной крупномасштабной съемке в геодезии, при контрольно-разметочных работах в судо- и авиастроении, планировочных работах в строительстве, а также для управления движением объектов по заданной траектории.
Известна система, предназначенная для определения координат и разворота объекта, включающая в себя тахеометр, устанавливаемый над известным пунктом, и отражатель, устанавливаемый на строительной машине. В процессе работы через определенный промежуток времени определяют координаты машины, сравнивают с проектными координатами, а pазницу между фактическими и проектными координатами засылают в блок управления для корректировки положения объекта (машины) [1].
Недостатком системы является дискретность работы, а значит и недостаточная точность определения положения машины, и необходимость закрепления контрольных точек на траектории движения.
Наиболее близким по технической сущности и достигаемому результату является устройство для определения координат, содержащее вращающийся передвижной блок, выполненный с возможностью формирования в горизонтальной плоскости трех лазерных пучков с вертикальной плоскостью поляризации, приемный блок, выполненный в виде последовательно расположенных на горизонтальной оси первого анализатора и первого фотоприемника, а также последовательно соединенных первого усилителя, вход которого подключен к первому фотоприемнику, первого аналого-цифрового преобразователя и вычислительного блока, при этом передающий и приемный блоки выполнены с возможностью размещения соответственно на исходном пункте и на объекте [2].
С помощью данного устройства в процессе работы в исходном пункте формируют три плоско-поляризованных лазерных пучка и придают им вращение вокруг вертикальной оси передатчика. Вместе с поворотом пучков синхронно поворачиваются также пропорционально углу поворота плоскости поляризации. Эффект поворота плоскостей поляризации приводит к тому, что пропускание приводит к тому, что пропускание поляризатора-анализатора на рейке в определяемом пункте, а значит и фототоки на выходе фотоприемника различны для каждого из пучков.
Преобразованные в цифровую форму фототоки используются мини-ЭВМ для получения пространственных координат объекта, на котором расположена приемная система (рейка с перечисленными элементами).
Недостатком прототипа является узкое функциональное назначение, заключающееся в том, что с его помощью можно определить лишь три координаты объекта в пространстве: высоту, дальность и полярный угол относительно какой-либо оси координат. В то же время часто требуется знать дополнительно к этим еще величину, характеризующую разворот объекта вокруг его вертикальной оси, т.е. угол разворота относительно принятой системы координат. Определение этого угла часто необходимо при управлении направлением движения объекта в автоматическом режиме.
Целью изобретения является расширение функционального назначения устройства за счет определения угла разворота объекта.
Поставленная цель достигается тем, что в устройстве для определения координат подвижного объекта, содержащем вращающийся передающий блок, выполненный с возможностью формирования в горизонтальной плоскости трех лазерных пучков с вертикальной плоскостью поляризации, приемный блок, выполненный в виде последовательно расположенных на горизонтальной оси первого анализатора и первого фотоприемника, а также последовательно соединенных первого усилителя, вход которого подключен к первому фотоприемнику, первого аналого-цифрового преобразователя и вычислительного блока, при этом передающий и приемный блоки выполнены с возможностью размещения соответственно на исходном пункте и на объекте, приемный блок выполнен с последовательно расположенными на вертикальной оси оптическим отклоняющим элементом, вторым анализатором и вторым фотоприемником, а также с последовательно соединенными вторым усилителем и вторым аналого-цифровым преобразователем, подключенным к вычислительному блоку, выход которого соединен с входом введенного блока управления разворотом объекта, причем второй анализатор выполнен с возможностью совмещения его оси с осью, параллельной оси объекта.
Таким образом, технический эффект достигается за счет определения второй приемной системой полярного угла α'x направления оси объекта в дополнение к полярному углу αx направления на объект с исходного пункта, определяемому первой приемной системой относительно одной из координат. При этом, если αx = α'x, то разворот отсутствует, если αx ≠ α'x, то угол разворота объекта равен
κ = α'x - αx.
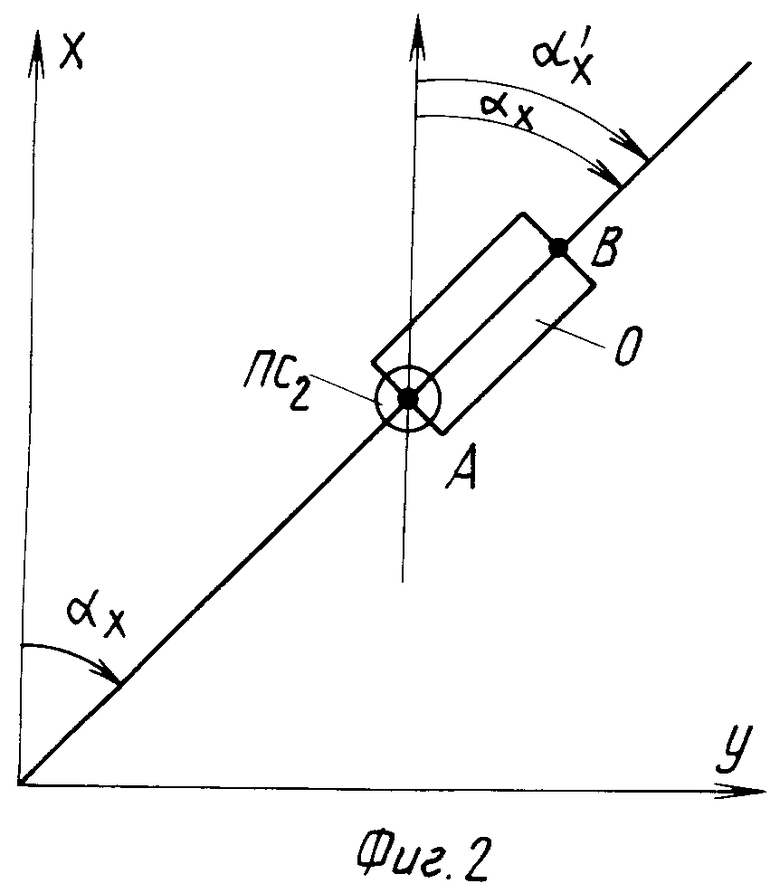
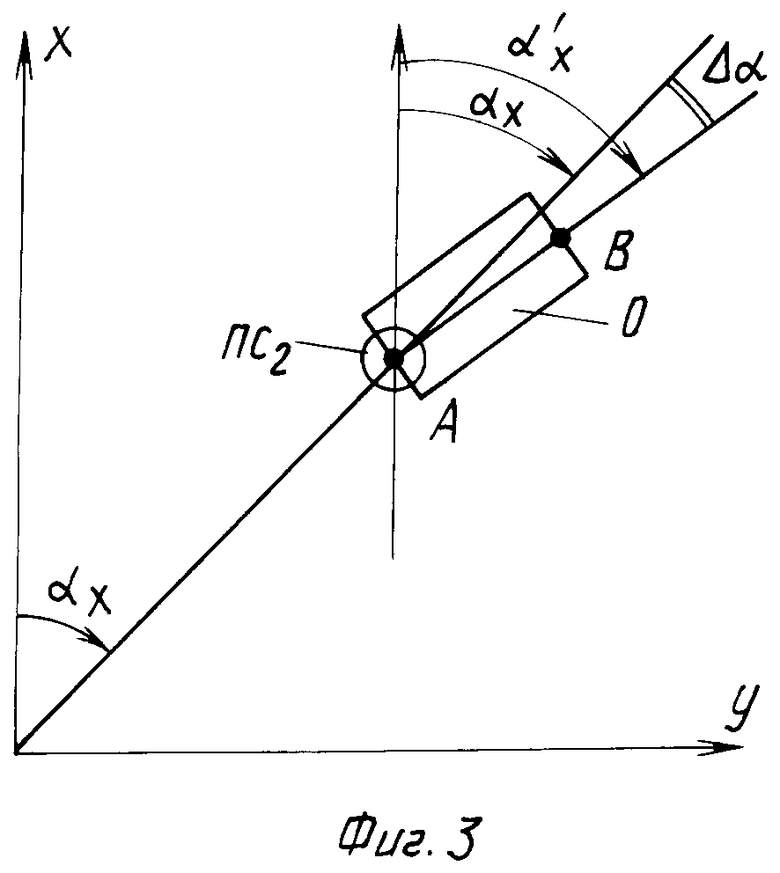
На фиг. 1 изображена условная схема второй приемной системы; на фиг.2 и 3 - схемы, относящиеся к геометрии измерений в случаях отсутствия и наличия разворота объекта.
Устройство для определения координат подвижного объекта содержит в исходном пункте передающий блок лазерного излучения и совмещенные две приемные системы (ПС1 и ПС2) на управляемом объекте, из которых вторая ПС2 содержит последовательно расположенные (фиг.1) светосборник 1, фильтр 2, поляризатор-анализатор 3, диафрагму 4, фотоприемник 5, усилитель 6, аналого-цифровой преобразователь (АЦП) 7, мини-ЭВМ 8 и блок 9 управления разворотом (БУРО).
Устройство для определения координат подвижного объекта работает следующим образом.
В исходном пункте передатчик формирует в горизонтальной плоскости три лазерных пучка с вертикальной плоскостью поляризации из которых два параллельных оси Y, а один - оси Х. Затем пучки вращают вертикальной оси передатчика.
В определяемой точке (на объекте) устанавливают приемную систему состоящую из двух частей: ПС1 для определения координат объекта и ПС2 для определения разворота объекта. При этом поворотом поляризатора-анализатора 3 вокруг вертикальной оси совмещают его ось с осью АВ управляемого объекта.
Вследствие поворота пучков синхронно поворачиваются и плоскости поляризации в пучках. Первая ПС1 обеспечивает получение пространственных координат объекта: Н - высоты, αx - полярного угла, S - расстояния до объекта.
Светосборник 1 (фиг. 1) второй ПС2 воспринимает лазерные пучки, преломляет их и направляет через фильтр 2 на поляризатор-анализатор 3. Теперь поворот плоскостей поляризации происходит в горизонтальной плоскости, т.е. в плоскости поляризатора-анализатора 3. Эффект поворота плоскостей поляризации приводит к тому, что пропускание поляризатора-анализатора 3, а значит и фототоки на выходе фотоприемника 5 различны для каждого из пучков. Так в блоке формируется сигнал I'х при пересечении фотоприемника пучком ах
I'х = Iosin2 αx.
В следующий момент времени точку А (фиг.2 и 3) пересекает пучок а''у и формируется сигнал
Iy'' = Iosin2(90o - αx - γ) , а затем пучок а'у с сигналом
Iy' = Iosin2(90o - αx + γ) , где γ - параллактический угол, зависящий от разнесенности параллельных пучков а'у и а''у.
Сигналы последовательно преобразуются из аналогового состояния в цифровое в АЦП 7 и после их усиления в усилителе 6 и поступают в мини-ЭВМ 8, которая реализует алгоритмы
γ = arcsin  ;
;
αx = arcctg  ;
;
S = R˙sin-1 γ.
В мини-ЭВМ 8 осуществляется сравнение полярных углов αx (направление исходной точки на объект) и α'x (направление оси управляемого объекта). Если αx = α'x (фиг.2), то ось объекта совпадает с направлением на него и разворот отсутствует. Если αx ≠ α'x, направление оси АВ объекта не совпадает с проектным (фиг.3), а разворот объекта равен κ = α'x - αx. Эта величина передается в БУРО 9, который вырабатывает соответствующий сигнал корректировки положения объекта. При этом точка А принимается за точку поворота, а точка В является "точкой управления" и поворачивается вокруг точки А до требуемого положения.
Заявляемое устройство позволяет просто и непрерывно управлять движением объекта без наличия контрольных точек вдоль трассы движения. Практически реализовать устройство можно на основе использования серийно выпускаемых промышленностью деталей, блоков и узлов, таких как светосборник, фильтр, анализатор-поляризатор, фотодиоды, усилитель сигналов и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения пространственных координат объекта | 1983 |
|
SU1155850A1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| Способ определения пространственных координат объекта | 1985 |
|
SU1333004A1 |
| ПОЛЯРИЗАЦИОННАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА ПО СТВОЛУ НАРЕЗНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2023 |
|
RU2805642C1 |
| Устройство для измерения угла скручивания | 1984 |
|
SU1392356A1 |
| СПОСОБ НЕИНВАЗИВНОГО ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ГЛЮКОЗЫ В КРОВИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2515410C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА | 2011 |
|
RU2461798C1 |
| СПОСОБ ИЗМЕРЕНИЯ СТЕПЕНИ ПОЛЯРИЗАЦИИ | 2003 |
|
RU2256887C1 |
| ОПТИЧЕСКИЙ ПЕЛЕНГАТОР | 2003 |
|
RU2231080C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВРАЩЕНИЯ ПЛОСКОСТИ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ФОТОЭЛЕКТРИЧЕСКИЙ ПОЛЯРИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2088896C1 |
Использование: в измерительной технике, в частности в устройствах для определения координат подвижного объекта при наземной крупномасштабной съемке в геодезии, при контрольно-разметочных работах в судо- и авиастроении, планировочных работ в строительстве, а также для управления движением объекта по заданной траектории. Сущность изобретения: устройство содержит в исходном пункте передающий блок лазерного излучения и две приемные системы на определяемом объекте. При этом вторая приемная система содержит последовательно расположенные светосборник 1, фильтр 2, поляризатор-анализатор 3, диафрагму 4, фотоприемник 5, усилитель 6, аналого-цифровой преобразователь 7, вычислительный блок 8 и блок 9 управления с разворотом объекта. Это позволяет определить не только высоту, дальность и полярный угол, а также угол разворота объекта. 3 ил.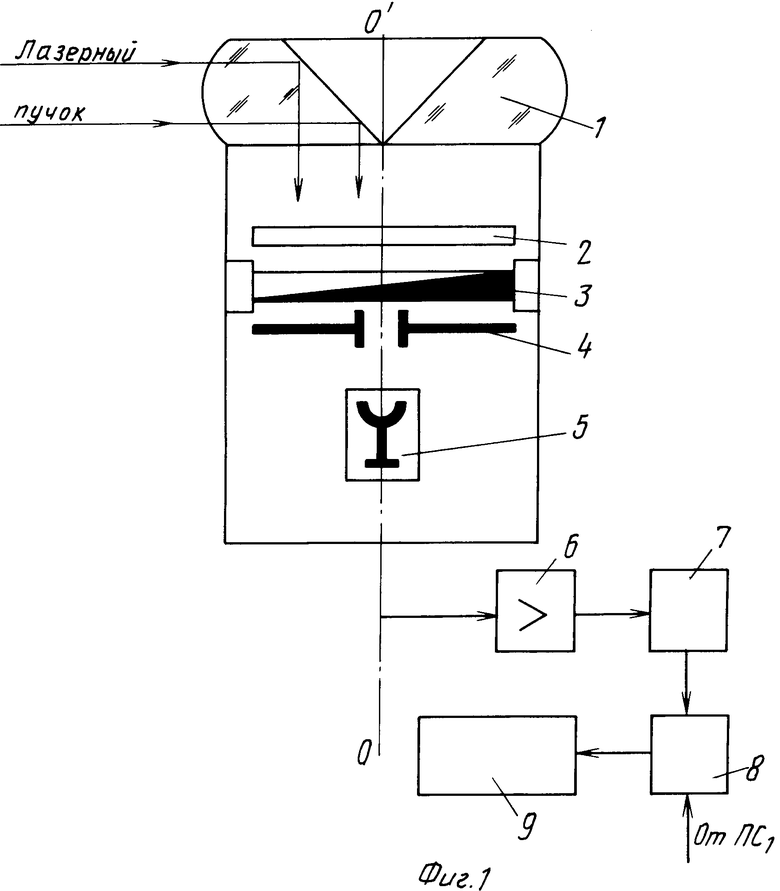
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА, содержащее вращающийся передающий блок, выполненный с возможностью формирования в горизонтальной плоскости трех лазерных пучков с вертикальной плоскостью поляризации, приемный блок, выполненный в виде последовательно расположенных на горизонтальной оси первого анализатора и первого фотоприемника, а также последовательно соединенных первого усилителя, вход которого подключен к первому фотоприемнику, первого аналого-цифрового преобразователя и вычислительного блока, при этом передающий и приемный блоки выполнены с возможностью размещения соответственно на исходном пункте и на объекте, отличающееся тем, что приемный блок выполнен с последовательно расположенными на вертикальной оси оптическим отклоняющим элементом, вторым анализатором и вторым фотоприемником, а также с последовательно соединенными вторым усилителем и вторым аналого-цифровым преобразователем, подключенным к вычислительному блоку, выход которого соединен с входом введенного блока управления разворотом объекта, причем второй анализатор выполнен с возможностью совмещения его оси с осью, параллельной оси объекта.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кочетов Ф.Г | |||
| Автоматизированные системы для геодезических измерений.М.:Недра, 1991, с.103-104. | |||
