Изобретение относится к геодезическим измерениям и может быть ис. пользовано для выполнения наземной крупномасштабной съемки, а также для определения пространственных координат объекта.
Известен способ определения координат объекта, основанный на развертке лазерного луча в две совмещенные плоскости, согласно которому производят двойное (прямое и обратное) круговое вращение лазерного луча в горизонтальной плоскости, фиксируют начало отсчета направления с помощью фотоприемника, регистрируют сигнал, отраженный от уголкового отражателя, расположенного на объекте,а дальность и угол места до объема получают как функции угловой скорости вращения луча.и временных интервалов между регистрациями сигналов. При этом обратное вращение начинают с момента
приема отраженного сигнала.
Недостатком способа является ограниченный диапазон применения из-за невозможности определения положения объекта в вертикальной плоскости. Кроме того, информация о положении объекта определяется на основе вре- мяимпульсного преобразования отраженных сигналов, что приводит к усложнению аппаратуры.
Наиболее близким к предлагаемому является способ определения положения объекта, согласно которому в одном пункте разделяют лазерный луЧНа две части и развертывают их с помощью цилиндрических линз в два сектора, ориентируют их в форме V или X под известным углом друг к другу, вращают секторы вокруг вертикальной оси прибора. В другом пункте устанавливают рейку с группой датчи,ков, расположенных на заданном расстоянии друг от друга, снабжают рейку радиоприемником и мини-ЭВМ, а систему развертки - радиопередатчиком. Угловое положение рейки определяют по количеству импульсов между исходным направлением и направлением на рейку, а дальность и превьшение определяют по расстоянию между датчиками, углу пересечения секторов и параллактическим углам, образованным центром вращения секторов и точками пересечения их с датчиками рейки.
Недостатком способа является сложность измерительного процесса, обусловленная необходимостью дополнительной развертки лазерного луча в секторы, что приводит к уменьшению ин-
тенсивности излучения, а значит, и к снижению дальности действия способа. Определяемые полярные координаты получаются с использованием времяимпульсного преобразования сигналов.
Это приводит к усложнению конструкции прибора, дополнительным погрешностям и необходимости последующего перевычисления координат объектов из полярной системы координат в прямоугольную.
Цель изобретения - упрощение способа путем непосредственного определения прямоугольных координат объекта с заданной ориентацией осей.
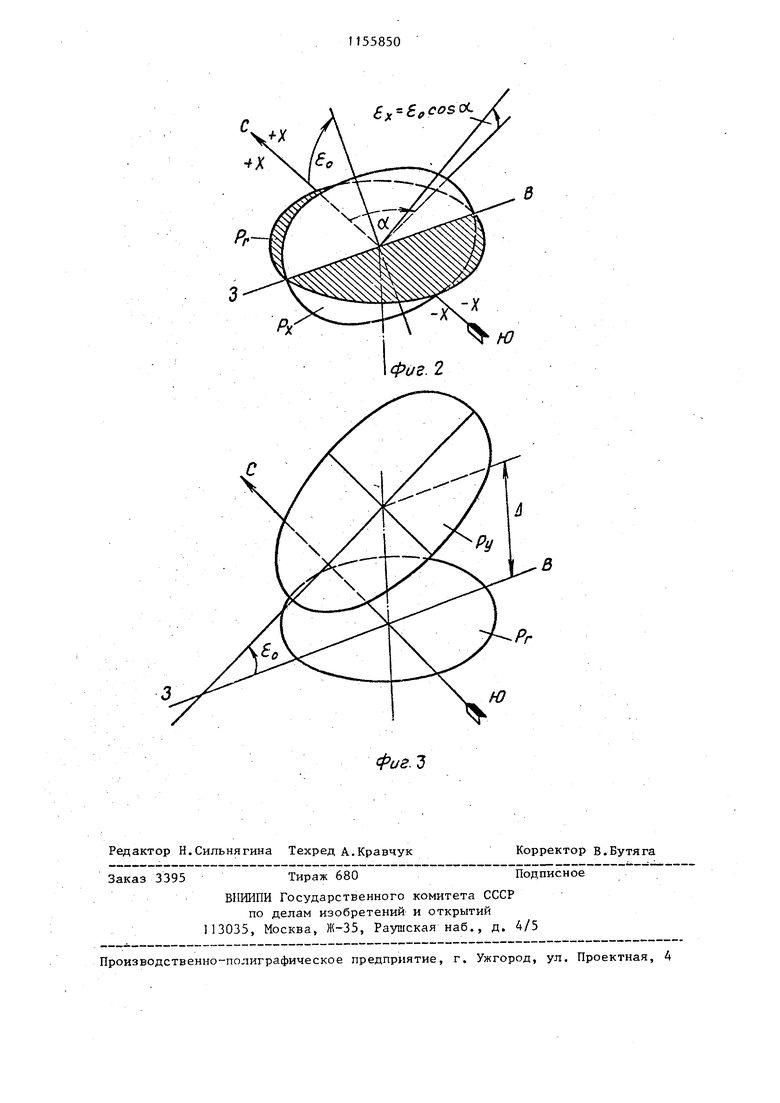
Поставленная цель достигается тем, что согласно способу определения про-: странственных координат объекта, по которому образуют двеплоскости лазерного излучения, располагают их
под углом друг к другу, а в определяемой точке регистрируют пересечения плоскостей лазерного излучения с фотоприемниками рейки, фиксируют места пересечения плоскостей с вертикально ориентированной рейкой в определяемой точке после установления линии пересечения плоскостей горизонтально и ориентации ее вдоль осевого меридиана, а затем - после
5 изменения ее направления на экваториальное, и по полученным в заданной последовательности пересечениям плоскостей лазерного излучения с рейкой определяют пространственные прямоугольные координаты объекта.
На фиг,1 показан принцип отсчитывания по рейке ДЬ иду при ориентировании линии пересечения плоскостей лазерного излучения по начальному
5 направлению (экваториальный наклон плоскости); на фиг.2 - принцип отсчитьшания ДХ при ориентировании линии пересечения плоскостей.ортогонально начальному направлению (мери-
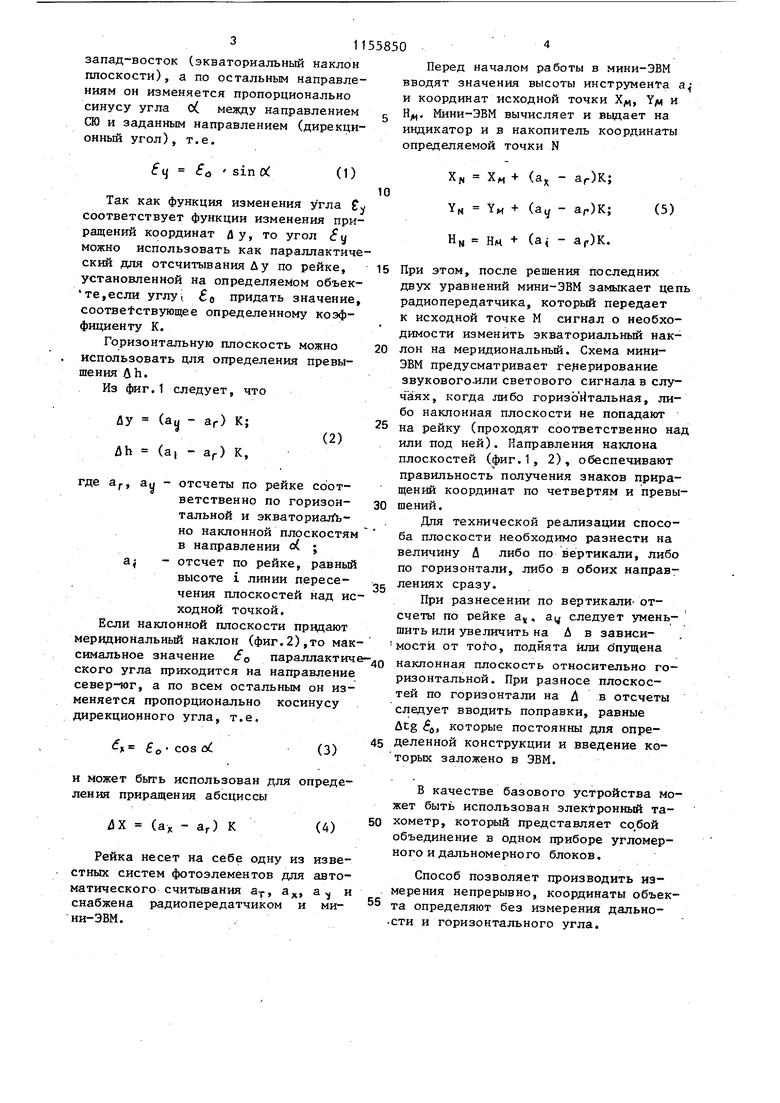
диональный наклон плоскости); на фиг.З - случай разнесения плоскостей по вертикали.
Если формирователь две пересекающиеся световые плоскости- одну горизонтальную Р, вторую наклонную Ри и ориентировать линию пересечения по направлению север-юг (фиг.1), то максимальный угол Со между плоскостями приходится по направлению 31155 запад-восток (экваториальный наклон плоскости), а по остальным направлениям он изменяется пропорционально синусу угла 0( между направлением СЮ и заданным направлением (дирекционный угол), т.е. f cf i5a sin 0 Так как функция изменения угла С соответствует функции изменения при ращений координат Ду, то угол у можно использовать как параллактич ский для отсчитывания Ду по рейке, установленной на определяемом объек те,если углуi о придать значение cooTBetCTByroniee определенному коэффициенту К. Горизонтальную плоскость можно использовать для определения превышения ЛЬ. Из фиг.1 следует, что ДУ (а - аг) К; ДЬ (а, - а) К, отсчеты по рейке соотгде а, ау ветственно по горизонтальной и экваториалй но наклонной плоскостя в направлении о( ; а - отсчет по рейке, равны высоте i линии пересечения плоскостей над и ходной точкой. Если наклонной плоскости придают меридиональный наклон (фиг.2),то ма симальное значение бд параллакти СКОРО угла приходится на направлени север-юг, а по всем остальным он из меняется пропорционально косинусу дирекционного угла, т.е. f о COS 0 и Может бья-ь использован для определения приращения абсциссы Х (ах - аг) К Рейка несет на себе одну из известных систем фотоэлементов для автоматического считьшания a-f, а, а и снабжена радиопередатчиком и мини-ЭВМ. 850 Перед началом работы в мини-ЭВМ вводят значения высоты инструмента координат исходной точки Х/ц, Y/ц и Н,. Мини-ЭВМ вычисляет и выдает на индикатор и в накопитель координаты определяемой точки N Xf4 XM + (а - аг)К.; YN YM + (аи - агЖ; Нм (а - . При этом, после решения последних двух уравнений мини-ЭВМ замыкает цепь радиопередатчика, который передает к исходной точке М сигнал о необходимости изменить экваториальный наклон на меридиональный. Схема миниЭВМ предусматривает генерирование звукового-или светового сигнала в случаях, когда либо горизойтальная, либо наклонная плоскости не попадают на рейку (проходят соответственно над или под ней). Направления наклона плоскостей (фиг.1, 2), обеспечивают правильность получения знаков приращений координат по четвертям и превышений. Для технической реализации способа плоскости необходимо разнести на величину Д либо по вертикали, либо по горизонтали, либо в обоих направлениях сразу. При разнесении по вертикали- отсчеты по рейке ау, ау следует уменьшить или увеличить на Д в зависимости от , поднята или опущена наклонная плоскость относительно горизонтальной. При разносе плоскостей по горизонтали на /1 в отсчеты следует вводить поправки, равные utg д, которые постоянны для определенной конструкции и введение которых заложено в ЭВМ. В качестве базового устройства может быть использован электронный тахометр, который представляет со.бой объединение в одном приборе угломерного и дальномерно го блоков. Способ позволяет производить измерения непрерывно, координаты объекта определяют без измерения дальности и горизонтального угла.
б
Pr
Ю
фиг. 3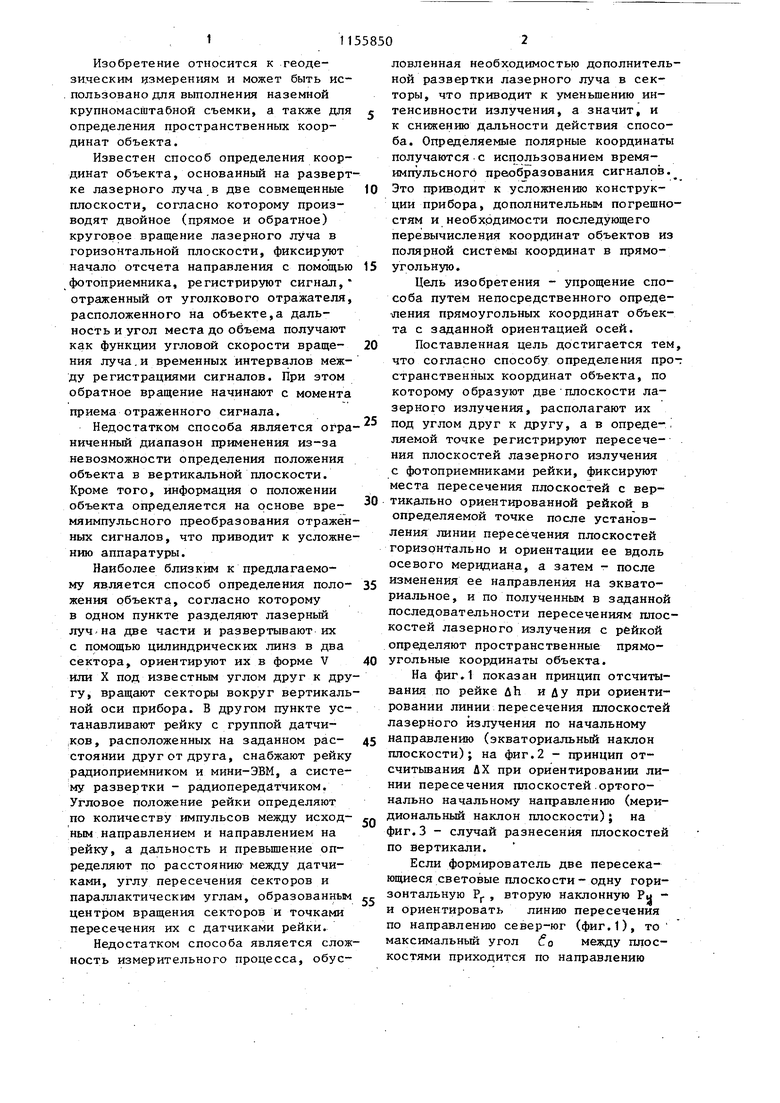
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения пространственных координат объекта | 1985 |
|
SU1333004A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА | 1992 |
|
RU2018085C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДВУХ ДИРЕКЦИОННЫХ УГЛОВ И ОДНОГО УГЛА МЕСТА | 2015 |
|
RU2601494C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| Способ определения пространственных координат точек и устройство для его осуществления | 1987 |
|
SU1627837A1 |
| Способ определения пространственного положения подвижного объекта | 1990 |
|
SU1788435A1 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ МОБИЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ИЗВЕСТНОМУ ОРИЕНТИРНОМУ НАПРАВЛЕНИЮ | 2024 |
|
RU2838002C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ОДНОГО ДИРЕКЦИОННОГО УГЛА И ДВУХ УГЛОВ МЕСТА | 2015 |
|
RU2645549C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА ЗАСЕЧКОЙ АЗИМУТА С ПЕРВОГО ИЗМЕРИТЕЛЬНОГО ПУНКТА И УГЛА МЕСТА С ДАЛЬНОСТЬЮ - СО ВТОРОГО | 2017 |
|
RU2667115C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТБЕННЫХ КООРДИНАТ ОБЪЕКТА, согласно которому образзпот две плоскости лазерного излучения, располагают их под углом друг к другу, а в определяемой точке регистрируют пересечения плоскостей лазерного излучения, с фотоприемниками рейки, о т л и чающийся тем, что, с целью упрощенияспособа путем непосредственного определения прямоугольных координат объекта с заданной ориентацией осей, фиксируют места пересечения плоскостей с вертикально ориентированной рейкой в определяемой точке после установления линии Пересечения плоскостей горизонтально и ориентации ее вдоль осевого меридиана, а затем - после изменения ее направления на экваториальное, и по полученным в заданной последовательс ности пересечениям плоскостей лазерse (/ ного излучения с рейкой определяют пространственные прямоугольные координаты объекта. С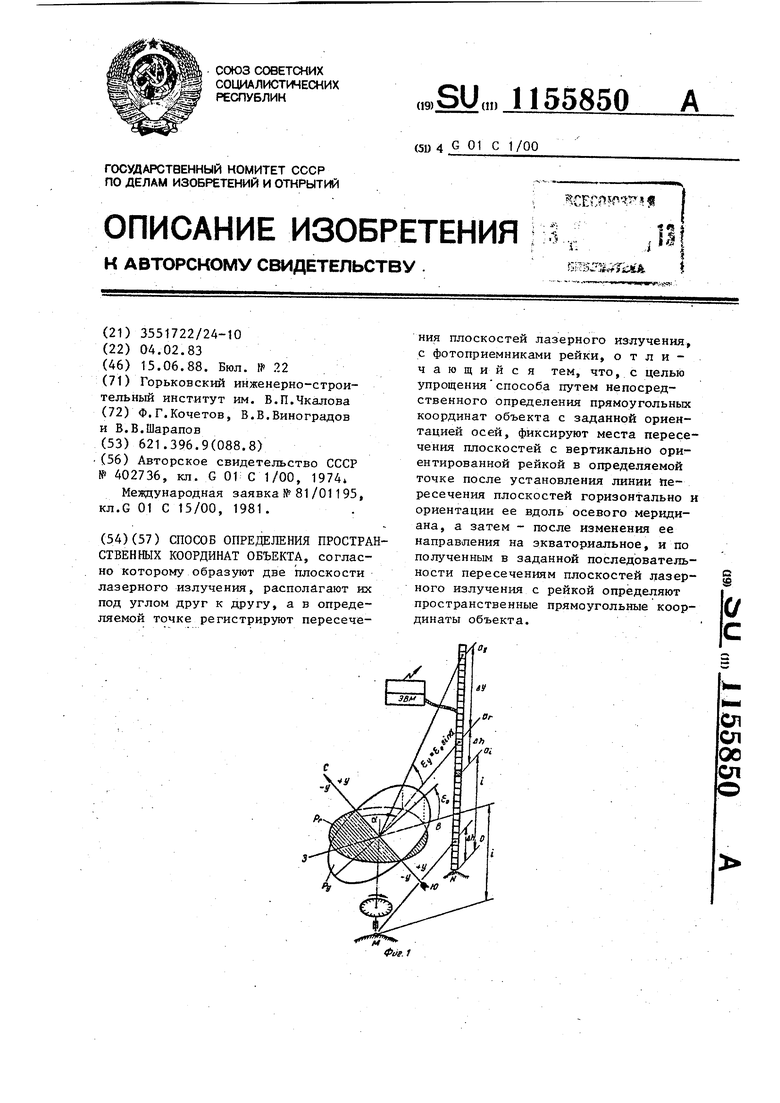
| 0 |
|
SU402736A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
