Изобретение относится к приборам для измерения параметров вибраций путем их преобразования в электрический сигнал.
Известен сейсмоприемник, содержащий корпус, установленные в корпусе инерционную массу, датчик перемещения инерционной массы и четыре магнита, два из которых установлены в верхней и нижней частях корпуса, а два других закреплены на инерционной массе в ее верхней и нижней частях с возможностью взаимодействия с первыми двумя магнитами так, что образуется магнитный подвес инерционной массы [1].
Причиной, препятствующей получению требуемого технического результата, при использовании данного аналога, является осуществление в нем магнитного подвеса инерционной массы действием вертикальных (продольных, т.е. вдоль движения инерционной массы) магнитных сил.
Известен также сейсмоприемник, содержащий корпус, вертикально расположенный в корпусе полый ферромагнитный цилиндр, выполненный в виде перемещающихся один относительно другого цилиндрических элементов, центральный из которых соединен с корпусом; выполненную в виде вертикально ориентированного постоянного магнита и расположенную внутри ферромагнитного цилиндра с возможностью вертикального перемещения инерционную массу, которая связана с корпусом посредством верхнего и нижнего поперечных центратоpов, а также датчик перемещения инерционной массы [2].
Причиной, препятствующей получению требуемого технического результата при использовании прототипа, является расположение инерционной массы непосредственно внутри ферромагнитного цилиндра и связь инерционной массы с корпусом посредством центраторов.
Сущность изобретения заключается в следующем.
Заявляемое изобретение направлено на решение задачи упрощения технологии изготовления сейсмоприемника за счет, во-первых, раздельного изготовления узла корпуса и узла инерционной массы, во-вторых, упрощения изготовления датчика перемещения инерционной массы, входящего в указанный второй узел, и, в-третьих, упрощения конечной операции сборки сейсмоприемника.
Технический результат, который может быть получен при осуществлении изобретения, заключается, во-первых, в возможности параллельного и независимого изготовления узлов корпуса и инерционной массы, во-вторых, в возможности изготовления указанных узлов штамповкой из пластмассы (узла корпуса полностью, узла инерционной массы по большинству элементов), в-третьих, в упрощении настройки собственной частоты сейсмоприемника.
Причинно-следственная связь между совокупностью существенных признаков заявляемого изобретения и достигаемым техническим результатом заключается в том, что благодаря расположению инерционной массы внутри каркаса катушки стало возможным конструктивное и технологическое объединение их в один узел (узел инерционной массы), что упрощает изготовление этого узла, так как это изготовление осуществляется отдельно от корпуса. В то же время благодаря расположению катушки внутри посадочного цилиндра соединение узла инерционной массы с корпусом осуществляется без дополнительных крепежных элементов (винтов), а посредством охвата посадочного цилиндра снаружи ферромагнитным цилиндром, который, обладая упругими свойствами, сжимает посадочный цилиндр (ввиду наличия у посадочного цилиндра продольной прорези) и тем самым надежно фиксирует каркас катушки внутри посадочного цилиндра. Таким образом, один конструктивный элемент (ферромагнитный цилиндр) выполняет три функции: 1) скрепления между собой корпуса и узла инерционной массы, 2) магнитного подвеса инерционной массы, 3) регулятора жесткости этого подвеса за счет изменения угла между осями ферромагнитного цилиндра и посадочного цилиндра. Конъюнктивное объединение в одном элементе перечисленных трех функций и является тем опосредствующем звеном, которое связывает существенные признаки с техническим результатом заявляемого изобретения.
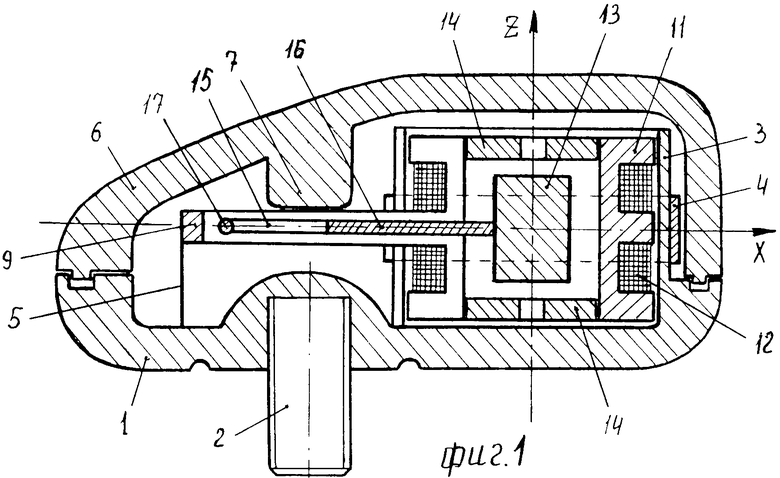
На фиг. 1 показан общий вид сейсмоприемника (продольное сечение); на фиг.2 - то же в плане (без крышки).
Сейсмоприемник включает два узла: узел корпуса и узел инерционной массы.
Узел корпуса содержит собственно корпус 1 с винтом 2 установки сейсмоприемника на объекте, полый посадочный цилиндр 3, ферромагнитный цилиндр 4, опорные ребра 5, крышку 6 с упорным ребром 7. При этом корпус 1, цилиндр 3 и ребра 5 выполнены из пластмассы как одно целое; элемент 2 впрессован в корпус 1; цилиндр 3 своей осью ориентирован вертикально и в поперечном сечении выполнен С-образным. т.е. с продольной прорезью 8, которая ориентирована в направлении опорных ребер 5; ферромагнитный цилиндр 4 также выполнен С-образным с ориентацией его прореза в том же направлении и установлен на наружной поверхности посадочного цилиндра 3 с возможностью его сжатия благодаря упругим свойствам ферромагнитного цилиндра 4.
Узел инерционной массы содержит горизонтальное плоское основание 9 с вертикальным треугольным отверстием 10, намотанную на каркасе 11 катушку 12, которая выполняет функцию датчика перемещения инерционной массы, инерционную массу 13, демпфирующие шайбы 14, равноплечий, U-образный элемент 15, горизонтальный стержень 16 и проволочную растяжку 17. При этом, проволочная растяжка 17 расположена горизонтально в широкой части треугольного отверстия 10 и закреплена своими концами на одном конце плоского основания 9; U-образный элемент 15 своими концами соединен с боковой поверхностью проволочной растяжки 17; U-образный элемент 15 своей вершиной соединен с одним концом горизонтального стержня 16, который расположен перпендикулярно растяжке 17; горизонтальный стержень 16 другим своим концом соединен с инерционной массой 13, которая выполнена в виде вертикально ориентированного постоянного магнита цилиндрической формы; инерционная масса 13 расположена внутри каркаса 11 катушки 12, который выполнен из немагнитного материала (пластмассы) в виде вертикально ориентированного полого цилиндра С-образной формы в поперечном сечении, т.е. с продольной прорезью 18, ориентированной в направлении растяжки 17; горизонтальный стержень 16 проходит через указанную прорезь 18; каркас 11 катушки 12 своей средней частью закреплен на другом, противоположном относительно растяжки 17 конце основания 9. В верхней и нижней частях каркаса 11 установлены медные шайбы 14, выполняющие функцию демпферов для инерционной массы.
Узел корпуса и узел инерционной массы соединены между собой следующим образом: основание 9 расположено на ребрах 5, каркас 11 катушки 12 расположен внутри посадочного цилиндра 3 (наружный диаметр каркаса 11 незначительно меньше внутреннего диаметра цилиндра 3), ферромагнитный цилиндр 4 установлен снаружи на посадочном цилиндре 3 и благодаря своим упругим свойствам сжимает посадочный цилиндр 3, который, деформируясь, зажимает (фиксирует) внутри себя каркас 11 катушки 12.
Работа сейсмоприемника заключается в следующем.
При вибрационных воздействиях на корпус 1 в направлении оси Z (т.е. в вертикальном направлении) данный корпус вместе с каркасом 11 катушки 12 перемещается относительно инерционной массы 13 вдоль ее оси (т.е. оси Z) благодаря наличию магнитного подвеса указанной массы 13 относительно корпуса 1. Данный магнитный подвес обусловлен действием поперечной магнитной растяжки, т.е. за счет действия поперечных (в плоскости XY) радиальных сил притяжения между инерционной массой 13, выполненной в виде магнита, и ферромагнитным кольцом 4. При этом действие поперечной магнитной растяжки обеспечивает устойчивость положения массы 13 в продольном направлении (т.е. в направлении оси Z), но не обеспечивает устойчивость положения массы 13 в поперечных направлениях (XY). Эта неустойчивость положения инерционной массы 13 в направлениях XY полностью компенсируется ее соединением с растяжкой 17 посредством стержня 16 и U-образного элемента 15, причем именно U-образность указанного элемента фиксирует горизонтальное положение массы в направлении Y. Другими словами, соединение инерционной массы 13 с растяжкой 17 посредством стержня 16 и U-образного элемента 15 представляет собой горизонтальный маятник, в котором растяжка 17 выполняет функцию шарнира, а маятник имеет только одну степень вращения в плоскости XZ вокруг продольной оси растяжки 17, параллельной оси Y.
Относительные вертикальные перемещения инерционной массы 13 и каркаса 11 катушки 12 наводят в этой катушке соответствующую ЭДС, которая является выходным сигналом сейсмоприемника.
Настройка собственной частоты сейсмоприемника осуществляется в процессе сборки (конечная операция) путем наклона ферромагнитного цилиндра 4, т.е. путем изменения угла между осью Z и осью данного цилиндра. При этом изменяется жесткость магнитного подвеса, что и изменяет собственную частоту сейсмоприемника,
Конструкция сейсмоприемника позволяет существенно упростить его изготовление, которое заключается в следующем.
Корпус 1 с посадочным цилиндром 3 и опорными ребрами 5 изготавливают литьем как одно целое. Крышку 6 с ребром 7 также изготавливают литьем, но отдельно. Горизонтальное основание 9 и каркас 11 катушки 12 также изготавливают литьем как одно целое. Затем устанавливают инерционную массу 13 внутри каркаса 11 катушки и соединяют массу с растяжкой 17. Затем устанавливают демпферы 14 и наматывают катушку 12, чем фиксиpуют эти демпферы. Собранный узел инерционной массы устанавливают в корпус 1. Для этого каркас 11 катушки 12 заводят во внутреннюю полость посадочного цилиндра 3 доопирания горизонтального основания 9 на ребра 5. Затем упругим ферромагнитным кольцом 4 охватывают посадочный цилиндр 3 снаружи, который вследствие этого (и вследствие наличия у него прорези) деформируется (сжимается), фиксируя тем самым положения каркаса 11 катушки 12 внутри посадочного цилиндра 3 и соответственно узла инерционной массы относительно корпуса. После соответствующего наклона ферромагнитного кольца 4 с целью настройки собственной частоты сейсмоприемника указанное кольцо фиксируют на наружной поверхности посадочного цилиндра клеем. Вывод проводов от катушки 12 и установку крышки 6 осуществляют обычными способами. При этом крышка 6 своим ребром 7 прижимает основание 9 к ребрам 5, тем самым дополнительно фиксируя узел инерционной массы внутри собранного корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОПРИЕМНИК | 1990 |
|
RU2045080C1 |
| СЕЙСМОПРИЕМНИК | 1990 |
|
RU2017175C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046375C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047188C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047189C1 |
| Сейсмоприемник | 1986 |
|
SU1436079A1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХКОМПОНЕНТНЫЙ СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046374C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| Сейсмоприемник | 1982 |
|
SU1056104A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |

Использование: измерение параметров вибраций. 0сущность изобретения: сейсмоприемник содержит узел корпуса и узел инерционной массы. Узел корпуса содержит корпус, посадочный цилиндр, ферромагнитный цилиндр, опорные ребра и крышку с упорным ребром. Узел инерционной массы содержит основание, каркас с катушкой, инерционную массу, демпфирующие шайбы, V-образный элемент, стержень, растяжку. Последняя выполняет роль шарнира для горизонтального маятника, образованного массой, элементом и стержнем. Каркас расположен внутри цилиндра и фиксирован ферромагнитным цилиндром. Основание расположено на ребрах корпуса и прижато сверху ребром крышки. 2 ил.
СЕЙСМОПРИЕМНИК, содержащий корпус, расположенные в корпусе полый ферромагнитный цилиндр, выполненную в виде вертикально ориентированного постоянного магнита инерционную массу и датчик перемещения инерционной массы, скрепленный с корпусом и выполненный в виде катушки индуктивности, отличающийся тем, что он снабжен горизонтально установленным в корпусе на опорных ребрах плоским основанием с вертикальным треугольным отверстием, вертикально установленным в корпусе полым посадочным цилиндром, выполненным из немагнитного материала, и горизонтально установленным в корпусе равноплечим U-образным элементом, концы которого соединены с боковой поверхностью проволочной растяжки, расположенной горизонтально в широкой части треугольного отверстия, а вершина U-образного элемента посредством горизонтального стержня соединена с инерционной массой, каркас катушки индуктивности выполнен в виде полого вертикально ориентированного цилиндра с расположенными на торцах демпфирующими дисками, при этом каркас катушки своей средней частью соединен с противоположным относительно проволочной растяжки концом плоского основания и установлен внутри посадочного цилиндра, на котором с наружной стороны закреплен ферромагнитный цилиндр, при этом инерционная масса расположена внутри каркаса катушки, а горизонтальный стержень проходит через одинаково ориентированные продольные прорези каркаса катушки, посадочного и ферромагнитного цилиндров, имеющих в поперечном сечении С-образную форму.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сейсмоприемник | 1986 |
|
SU1436079A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

