Изобретение относится к измерительной технике и сейсморазведке, в частности к приборам, предназначенным для измерения параметров вибраций, а также колебаний почвы и сооружений.
Известен сейсмоприемник, содержащий корпус, инерционную массу, датчик перемещения инерционной массы и четыре магнита, два из которых закреплены в верхней и нижней частях корпуса и обращены друг к другу одноименными полюсами, а два других магнита закреплены в верхней и нижней частях инерционной массы, при этом верхняя пара магнитов работает на притяжение, а нижняя на отталкивание [1].
Недостатками этого сейсмоприемника является сложность конструкции и относительно низкая чувствительность из-за довольно большой жесткости магнитного подвеса.
Известен также сейсмоприемник, содержащий корпус, вертикально расположенный в корпусе полый ферромагнитный цилиндр, выполненный в виде перемещаемых один относительно другого цилиндрических элементов, центральный из которых соединен с корпусом, инерционную массу, выполненную в виде вертикально ориентированного своими полюсами постоянного магнита и расположенную внутри ферромагнитного цилиндра с возможностью вертикального перемещения, связанную с корпусом посредством двух стержней и двух поперечных центраторов, а также датчик перемещения инерционной массы [2].
Недостатком такого сейсмоприемника состоит в относительно низкой чувствительности, обусловленной трением скольжения в поперечных центраторах.
Цель изобретения - повышение чувствительности.
Цель достигается тем, что сейсмоприемник, содержащий корпус, вертикально расположенный в корпусе по крайней мере один полый ферромагнитный элемент, выполненную в виде вертикально ориентированного своими полюсами постоянного магнита и расположенную внутри ферромагнитного элемента с возможностью вертикального перемещения инерционную массу, а также соединенный одним концом с инерционной массой стержень и датчик перемещения инерционной массы, скрепленной с корпусом, в корпусе установлен полый опорный цилиндр из немагнитного материала, торцами соединенный с корпусом, расположенный между магнитом и стенкой ферромагнитного элемента, причем в опорном цилиндре выполнено отверстие, а в ферромагнитном элементе прорезь, через которые пропущен стержень. Второй конец стержня связан с вершиной V-образного элемента, концы которого связаны с растяжкой, укрепленной в корпусе, а ферромагнитный элемент выполнен с возможностью регулирования между ним и магнитом. Ферромагнитный элемент выполнен с поперечным резьбовым отверстием в его стенке с установленным в этом отверстии с возможностью упора в стенку опорного цилиндра регулировочным винтом.
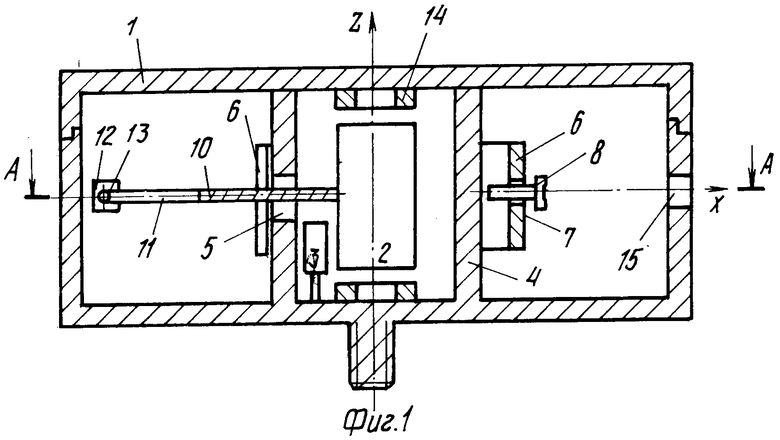
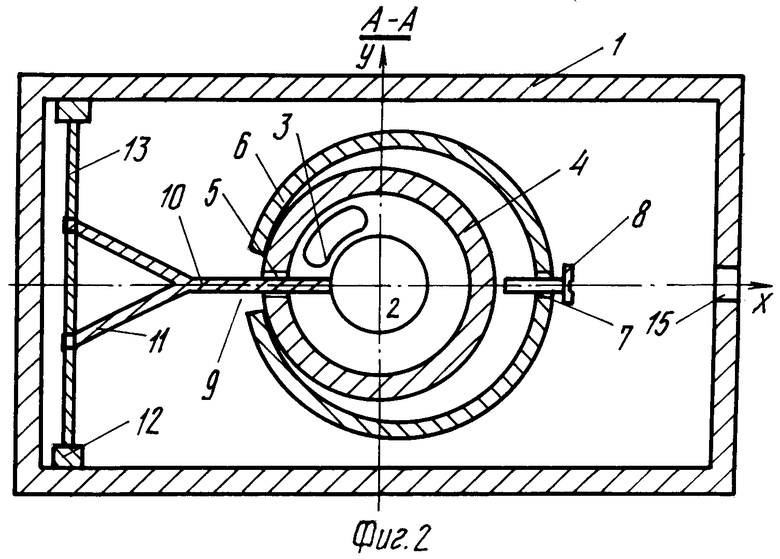
На фиг. 1 показан сейсмоприемник, продольный разрез; на фиг.2 - разрез А-А на фиг.1.
Сейсмоприемник содержит корпус 1, выполненную в виде вертикально ориентированного своими полюсами постоянного магнита инерционную массу 2, соединенный с корпусом 1 датчик 3 перемещения инерционной массы 2, соединенный торцами с корпусом 1 опорный цилиндр 4 из немагнитного материала (с боковым отверстием 5), полый ферромагнитный элемент 6, снабженный поперечным резьбовым отверстием 7 с регулировочным винтом 8 с одной стороны и вертикальной прорезью 9 с другой, горизонтально расположенный и соединенный одним концом с инерционной массой 2 стержень 10, расположенный в горизонтальной плоскости равноплечий V-образный элемент 11, вершина которого при этом соединена с другим концом стержня 10, горизонтально расположенную и соединенную с корпусом 1 при помощи натяжных элементов 12 проволочную растяжку 13, к боковой поверхности которой своими свободными концами присоединен V-образный элемент 11.
Таким образом, инерционная масса 2, стержень 10, V-образный элемент 11 и растяжка 13 вместе образуют горизонтальный маятник, установленный с возможностью вращения относительно растяжки 13. Последнюю выбирают достаточно тонкой так, что момент сопротивления этому вращению в определенных пределах мал. Фактически стержень 10, элемент 11 и растяжка 13 вместе выполняют функцию центрации массы 2 по оси Z, то есть по оси опорного цилиндра 4. При этом своей вершиной V-образный элемент 11 соединен с инерционной массой 2 посредством стержня 10, который проходит через отверстие 5 в стенке полого опорного цилиндра 4 и через вертикальную прорезь 9 в стенке ферромагнитного элемента 6. Ферромагнитный элемент 6 в горизонтальном сечении представляет собой незамкнутое кольцо, которое деформируется вследствие ввинчивания в резьбовое отверстие 7 элемента 6 винта 8, упирающегося при этом в наружную поверхность стенки опорного цилиндра 4. Ферромагнитный полый элемент 6 выполняет функцию поперечной магнитной растяжки с изменяемыми магнитными силами притяжения между массой 2 и элементом 6 за счет изменения зазора при деформировании элемента, что обусловливает точную настройку собственной частоты преобразователя. Два медных кольца 14, установленные внутри корпуса против торцов инерционной массы 2, осуществляют демпфирование колебаний инерционной массы 2 путем индуцирования в них вихревых токов. Устанавливая кольца 14 на различном состоянии от торцов инерционной массы 2, регулируют этим коэффициентом демпфирования инерционной массы. Отверстие 15 в корпусе 1 обеспечивает возможность доступа к винту 8.
Сейсмоприемник работает следующим образом.
При вибрационных воздействиях на корпус 1 в направлении оси Z он смещается относительно инерционной массы 2 вдоль оси Z. Датчик 3 преобразует величину продольного перемещения массы 2 или величину производной от этого перемещения по времени в пропорциональный электрический сигнал. При этом датчик 3 может быть выполнен в виде катушки индуктивности, закрепленной неподвижно относительно корпуса между инерционной массой 2, являющейся магнитом и ферромагнитным цилиндром 6. Количество витков этой катушки определяет коэффициент электромеханического преобразования сейсмоприемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОПРИЕМНИК | 1990 |
|
RU2045080C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2018155C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047188C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047189C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046375C1 |
| Сейсмоприемник | 1986 |
|
SU1436079A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2019787C1 |
| ШТАМП ДЛЯ РАЗДАЧИ ПОЛЫХ ЗАГОТОВОК | 1991 |
|
RU2083307C1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU855580A1 |
Сущность изобретения: в корпусе сейсмоприемника посредством растяжки, V-образного элемента и стержня укреплена инерционная масса в виде постоянного магнита, установленная с возможностью перемещения внутри ферромагнитного элемента и опорного цилиндра, скрепленного с корпусом, ферромагнитный элемент выполнен с возможностью регулирования зазора между ним и магнитом, а с корпусом скреплен датчик перемещения. 1 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сейсмоприемник | 1986 |
|
SU1436079A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
