Изобретение относится к устройствам для преобразования механических колебаний в электрические сигналы и может быть использовано в сейсморазведке.
Известен сейсмоприемник, содержащий корпус, расположенный в корпусе ферромагнитный элемент, выполненный в виде нескольких полых цилиндров, инерционную массу, расположенную внутри ферромагнитного элемента с возможностью вертикального перемещения и выполненную в виде вертикально ориентированного своими полюсами постоянного магнита, а также расположенный внутри корпуса датчик перемещения инерционной массы, которая при этом связана с корпусом посредством двух вертикально расположенных стержней и центраторов.
Недостатком такого сейсмоприемника является сложность технологии его изготовления, обусловленная наличием центраторов и расположением ферромагнитного элемента внутри корпуса. Трение в центраторах снижает также чувствительность устройства.
Известен также сейсмоприемник, в корпусе которого на маятниковом подвесе установлена с возможностью вертикального перемещения инерционная масса, выполненная в виде магнита, ориентированная своими полюсами вертикально. Маятник удерживается горизонтально путем взаимодействия инерционной массы и ферромагнитного элемента, установленного на опорном элементе в корпусе. За счет изменения геометрии ферромагнитного элемента и изменения расстояния от него до инерционной массы возможно изменение жесткости магнитного подвеса и собственной частоты сейсмоприемника. Движение инерционной массы преобразуется датчиком.
В этом сейсмоприемнике отсутствует трение, снижающее чувствительность, однако, настройка и сборка сейсмоприемника затруднены вследствие ограниченного доступа к деталям сейсмоприемника.
Целью изобретения является улучшение технологичности.
Для этого в устройство, содержащее разъемный корпус, расположенные внутри корпуса с возможностью перемещения инерционную массу в виде ориентированного вертикально своими полюсами постоянного магнита, второй конец которого связан с вершиной V-образного элемента, укрепленного на растяжке, и датчик перемещения инерционной массы, а также ферромагнитный элемент, введено основание, шарнирно установленное в корпусе, плоскость сочленения частей корпуса проходит горизонтально через инерционную массу, а части корпуса соединены ферромагнитным элементом, выполненным в виде скобы.
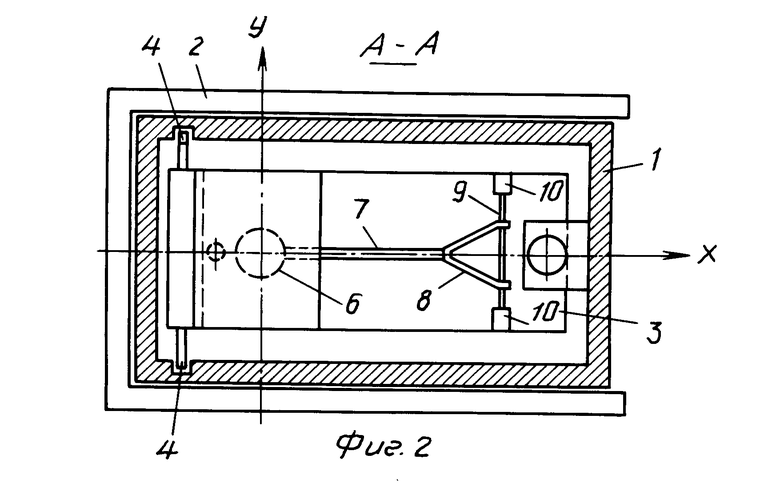
На фиг. 1 схематично изображен предлагаемый сейсмоприемник, продольный вертикальный разрез; на фиг. 2 разрез А-А на фиг. 1.
Сейсмоприемник содержит корпус 1, который в условной горизонтальной плоскости XY, проходящей через инерционную массу 6, выполнен разъемным и состоит из двух частей верхней и нижней, соединенных между собой ферромагнитным элементом 3, выполненным в виде скобы. Внутри корпуса установлено основание 3, один конец которого соединен с корпусом 1 посредством шарниров 4, а другой посредством винта 5, предназначенного для регулируемого поворота основания 3 вокруг шарниров 4. Внутри корпуса 1 также установлена инерционная масса 6, выполненная в виде вертикально ориентированного своими полюсами постоянного магнита. При этом инерционная масса 6 соединена с одним концом горизонтального стержня 7, другой конец которого посредством V-образного элемента 8 соединен с проволочной растяжкой 9, концы которой посредством натяжных элементов 10 соединены с основанием 3. Таким образом, инерционная масса 6, горизонтальный стержень 7, V-образный элемент 8 и проволочная поперечная растяжка 9 совместно образуют горизонтальный маятник, имеющий возможность вращаться относительно проволочной растяжки 9. Последнюю выбирают достаточно тонкой, так что момент сопротивления этому вращению незначителен. Фактически стержень 7, V-образный элемент 8 и проволочная растяжка 9 выполняют функцию центрации инерционной массы на оси Z. Кроме того, сейсмоприемник содержит установленный на основании 3 датчик 11 для преобразования вертикальных (в направлении оси Z) колебаний инерционной массы 6 относительно основания 3 и корпуса 1 в электрический сигнал. Сейсмоприемник также снабжен двумя медными кольцами 12, установленными также на основании 3 напротив торцев инерционной массы 6. Эти кольца осуществляют демпфирование колебаний инерционной массы 6 путем индуцирования в них вихревых токов. Установкой колец 12 на определенном расстоянии от торцев инерционной массы 6 задают определенный коэффициент демпфирования инерционной массы, а установкой определенного положения основания 3 относительно корпуса 1 и соответственно относительно ферромагнитного элемента 2 задают требуемую частоту собственных колебаний магнитного подвеса.
Сейсмоприемник работает следующим образом.
Вследствие вибрационного воздействия на корпус 1 в направлении оси Z данный корпус смещается относительно инерционной массы 6 в этом направлении благодаря магнитному подвесу инерционной массы 6 относительно корпуса 1. Указанный магнитный подвес обусловлен действием поперечной магнитной растяжки, т.е. за счет действия поперечных радиальных сил притяжения между инерционной массой 6 и ферромагнитным элементом 2, закрепленным на корпусе 1 с его наружной стороны. При этом неустойчивость инерционной массы 6 в горизонтальной плоскости вследствие действия поперечных магнитных сил притяжения между этой массой и ферромагнитным элементом 2 полностью компенсируется соединением массы 6 с проволочной растяжкой 9 посредством горизонтального стержня 7 и V-образного элемента 8. Колебания подвешенной таким образом инерционной массы 6 относительно корпуса 1 в направлении Z преобразуются датчиком 11 в электрический сигнал, который передается на регистрирующую аппаратуру.
При этом регулирование жесткости магнитного подвеса инерционной массы 6 и, как следствие, собственной частоты сейсмоприемника осуществляют до начала рабочей эксплуатации сейсмоприемника посредством винта 5. Для этого сейсмоприемник устанавливают на вибрационный стенд и, задав определенные параметры колебаний сейсмоприемника, вращают винт 5 до момента получения максимума выходного сигнала сейсмоприемника. Вследствие вращения винта 5 по часовой или против часовой стрелки правый конец основания 3 (фиг. 1) перемещается соответственно вниз или вверх относительно корпуса 1, что приводит к соответствующему повороту этого основания относительно горизонтальной оси шарниров 4. Это приводит к определенному повороту продольной оси инерционной массы относительно вертикальной оси Z, являющейся одновременно продольной осью ферромагнитного элемента 2. Поворот продольной оси инерционной массы 6 относительно продольной оси ферромагнитного элемента 2 приводит к изменению поперечных сил магнитного притяжения между массой 6 и ферромагнитным элементом 2 и соответственно к изменению жесткости магнитного подвеса инерционной массы. При этом допустимые пределы отклонения продольной оси инерционной массы 6 от оси Z определяются допустимой погрешностью измерения вибраций. Практика показывает, что накладываемые этой допустимой погрешностью ограничения на регулирование частоты собственных колебаний магнитного подвеса являются тем не менее достаточными для точной настройки собственной частоты сейсмоприемника независимо от других параметров (коэффициентов демпфирования и преобразования).
Ферромагнитный элемент выполняет одновременно две функции: функцию крепления частей корпуса друг к другу и функцию магнитного подвеса инерционной массы. При этом настройка жесткости этого подвеса осуществляется не изменением геометрии ферромагнитного элемента, как это имеет место в прототипе, а изменением положения основания внутри корпуса, что проще в изготовлении.
Сейсмоприемник имеет значительно более простую технологию его сборки, так как инерционная масса, датчик ее перемещения и демпфирующие кольца сначала устанавливаются на основании, а затем уже это основание вместе с указанными элементами как готовый блок устанавливается в нижнюю половину корпуса. Затем корпус закрывают крышкой (т.е. верхней частью корпуса) и обе части корпуса (верхнюю и нижнюю) соединяют между собой ферромагнитным элементом. После этого сейсмоприемник устанавливают на вибростенд и, изменяя положение основания внутри корпуса вращением регулировочного винта, устанавливают требуемую частоту собственных колебаний сейсмоприемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2018155C1 |
| СЕЙСМОПРИЕМНИК | 1990 |
|
RU2017175C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047188C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047189C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046375C1 |
| Сейсмоприемник | 1986 |
|
SU1436079A1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХКОМПОНЕНТНЫЙ СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046374C1 |
| СЕЙСМОПРИЕМНОЕ УСТРОЙСТВО | 1999 |
|
RU2156478C1 |
| Сейсмоприемник | 1979 |
|
SU842678A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
Использование: преобразование механических колебаний в электрические сигналы в сейсморазведке. Сущность изобретения: сейсмоприемник содержит корпус 1, состоящий из двух частей, соединенных ферромагнитным элементом 2, с основанием 3, установленным на шарнирах с возможностью перемещения посредством винта 5. Инерционная масса 6 через стержень 7, V-образный элемент 8 и растяжку установлена на основании. Датчик 11 преобразует продольные колебания инерционной массы в электрические сигналы. 2 ил.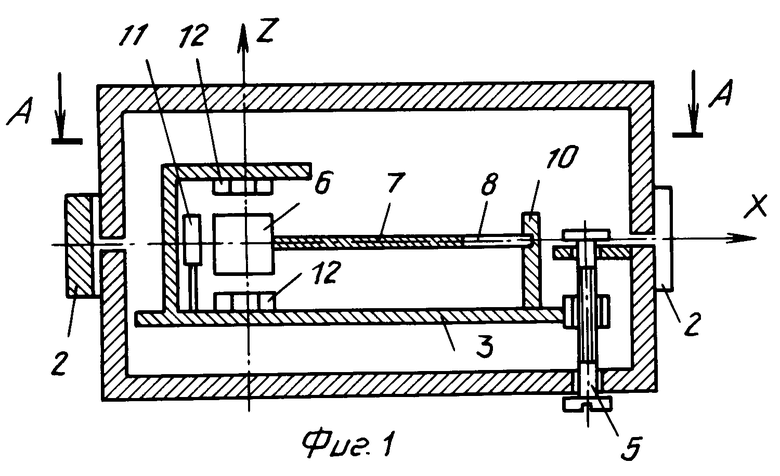
СЕЙСМОПРИЕМНИК, содержащий разъемный корпус, расположенные внутри корпуса с возможностью вертикального перемещения инерционную массу в виде ориентированного вертикально своими полюсами постоянного магнита, закрепленную на горизонтальном стержне, второй конец которого связан с вершиной V-образного элемента, укрепленного на растяжке, и датчик перемещения инерционной массы, а также ферромагнитный элемент, установленный с возможностью силового взаимодействия с инерционной массой, отличающийся тем, что, с целью улучшения технологичности, растяжка и датчик укреплены на основании, шарнирно установленном в корпусе с возможностью вертикального перемещения, плоскость сочленения частей корпуса проходит горизонтально через инерционную массу, а части корпуса соединены ферромагнитным элементом, выполненным в виде скобы.
| СЕЙСМОПРИЕМНИК | 1990 |
|
RU2017175C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
