Изобретение относится к промысловой геофизике и может быть использовано для измерения магнитного азимута геофизических скважин малого диаметра.
Прототипом изобретения является устройство для контроля комплекса параметров искривления скважин, содержащее три жестко скрепленных стержневых феррозонда, один из которых сориентирован вдоль продольной оси корпуса устройства, а два других расположены во взаимно перпендикулярных плоскостях под одинаковыми острыми углами к продольной оси корпуса, а также датчик зенитного угла, выполненный на основе синусно-косинусных трансформаторов и рамок-маятников, и схему преобразования [2].
Недостаток устройства-прототипа состоит в том, что при указанном неортогональном расположении осей чувствительности феррозондов существенно возрастает погрешность, обусловленная неточной установкой феppозондов в заданное положение или неточным определением ориентации осей чувствительности феррозондов. В результате значительно снижается точность измерения азимута.
При использовании феррозондовых датчиков погрешности измерения магнитного азимута, обусловленная неточным определением направления вектора геомагнитного поля, составляет
Δα =  (
( ×
×  )
) , (1), где ν - угол магнитного наклонения;
, (1), где ν - угол магнитного наклонения; - истинное значение вектора геомагнитного поля;
- истинное значение вектора геомагнитного поля; - вектор, характеризующий погрешность измерения геомагнитного поля;
- вектор, характеризующий погрешность измерения геомагнитного поля; - направляющий вектор ускорения силы тяжести. Величина
- направляющий вектор ускорения силы тяжести. Величина  представляет собой разность
представляет собой разность =
=  -
- , ,(2) где
, ,(2) где  - значение вектора геомагнитного поля, полученное в результате его измерения с помощью феррозондовых датчиков.
- значение вектора геомагнитного поля, полученное в результате его измерения с помощью феррозондовых датчиков.
Вектор сигналов датчика с жесткозакрепленными феррозондами в ортогональном базисе, связанном с корпусом датчика, равен = C
= C , (3) где CR - матрица направляющих косинусов осей чувствительности феррозондов, соответствующая реальному расположению феррозондов в корпусе. Поскольку при обработке сигналов феррозондов используется матрица С(С≠СR), определяемая на стадии проектирования, измеренное значение вектора геомагнитного поля равно
, (3) где CR - матрица направляющих косинусов осей чувствительности феррозондов, соответствующая реальному расположению феррозондов в корпусе. Поскольку при обработке сигналов феррозондов используется матрица С(С≠СR), определяемая на стадии проектирования, измеренное значение вектора геомагнитного поля равно = C
= C (4).
(4).
В связи с тем, что CR=C+ Δ C (5), где Δ С - матрица направляющих косинусов векторов отклонений  , характеризующая собой несовпадение реальных и заданных направлений осей чувствительности феррозондов, погрешность измерения вектора геомагнитного поля на основании (2-5) составляет
, характеризующая собой несовпадение реальных и заданных направлений осей чувствительности феррозондов, погрешность измерения вектора геомагнитного поля на основании (2-5) составляет =
=  ΔC
ΔC ,(6), где А - матрица алгебраических дополнений элементов матрицы С.
,(6), где А - матрица алгебраических дополнений элементов матрицы С.
Из (1) и (6) следует, что погрешность измерения азимута уменьшается с увеличением значения det C, т.е. при одинаковых погрешностях установки осей чувствительности феррозондов  =
=  точнее будет тот датчик, который имеет большее значение
точнее будет тот датчик, который имеет большее значение  det C
det C . Предельное максимальное значение
. Предельное максимальное значение  det C
det C для любых датчиков равно 1, что соответствует ортогональному расположению осей чувствительности феррозондов.
для любых датчиков равно 1, что соответствует ортогональному расположению осей чувствительности феррозондов.
Если ввести ортогональный базис В (OXYZ), направив ось OZ по продольной оси цилиндрического корпуса скважинного прибора, то для устройства, принятого за прототип, матрица ориентации осей чувствительности феррозондов в этом базисе будет иметь вид
C1=  s
s nγ
nγ  , (7) где γ - остpый угол между продольной осью цилиндрического корпуса устройства и осями чувствительности наклоненных по отношению к ней двух феррозондов. Определитель этой матрицы равен detC1= sin2 γ (8).
, (7) где γ - остpый угол между продольной осью цилиндрического корпуса устройства и осями чувствительности наклоненных по отношению к ней двух феррозондов. Определитель этой матрицы равен detC1= sin2 γ (8).
Целью изобретения является повышение точности измерений.
Цель достигается тем, что в известном устройстве, содержащем цилиндрический корпус и три жестко закрепленных в нем стержневых феррозонда, два из которых установлены с образованием одинаковых острых углов между их осями чувствительности и продольной осью цилиндрического корпуса, третий феррозонд установлен с образованием между своей осью чувствительности и продольной осью корпуса угла, равного углам, образованным осями чувствительности двух первых феррозондов с продольной осью корпуса, при этом феррозонды расположены в корпусе с образованием между проекциями их осей чувствительности на плоскость поперечного сечения цилиндрического корпуса углов, равных 120о, а значение угла между осью чувствительности каждого стержневого феррозонда и продольной осью цилиндрического корпуса меньше 67,3624о.
В базисе В (OXYZ) матрица ориентации осей чувствительности феррозондов в предлагаемом устройстве равна
C2=



 (9), где γ - по аналогии с прототипом острый угол между продольной осью цилиндрического корпуса датчика и осями чувствительности феррозондов. Определитель матрицы составляет
(9), где γ - по аналогии с прототипом острый угол между продольной осью цилиндрического корпуса датчика и осями чувствительности феррозондов. Определитель матрицы составляет
det C2 = 1,5 sin2γ cosγ (10).
sin2γ cosγ (10).
При γ < 67,3624 det C
det C >
>  det C
det C . Следовательно, при одинаковой погрешности установки осей чувствительности феррозондов в заданное положение измерение магнитного азимута с помощью предлагаемого устройства осуществляется с меньшей погрешностью.
. Следовательно, при одинаковой погрешности установки осей чувствительности феррозондов в заданное положение измерение магнитного азимута с помощью предлагаемого устройства осуществляется с меньшей погрешностью.
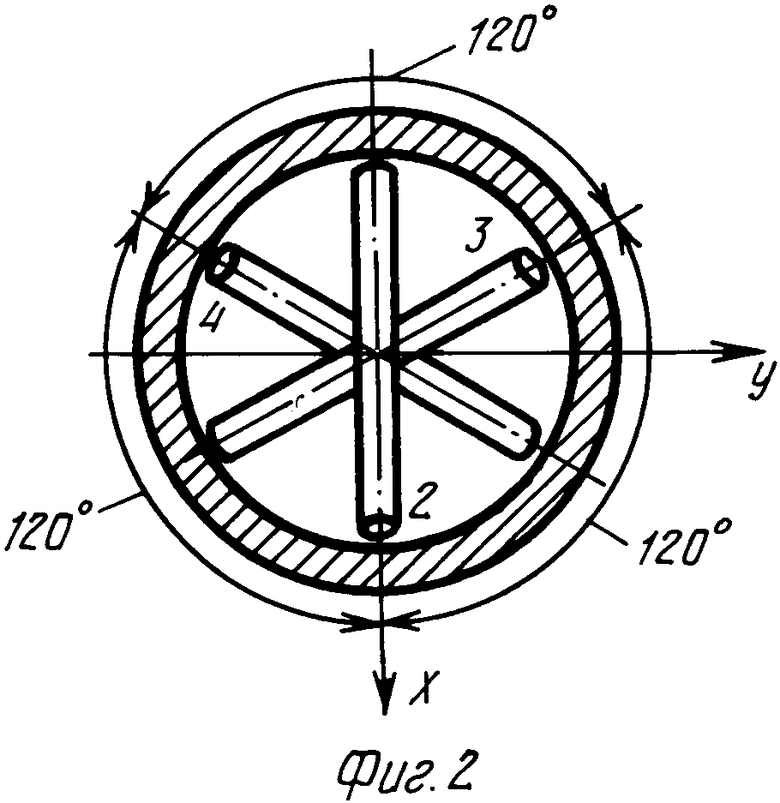
Относительное расположение проекций осей чувствительности феррозондов на плоскость поперечного сечения цилиндрического корпуса под углом 120о, т. е. симметричное расположение феррозондов относительно продольной оси корпуса, обеспечивает в предлагаемом датчике максимальное значение |det C2| при заданной величине γ.
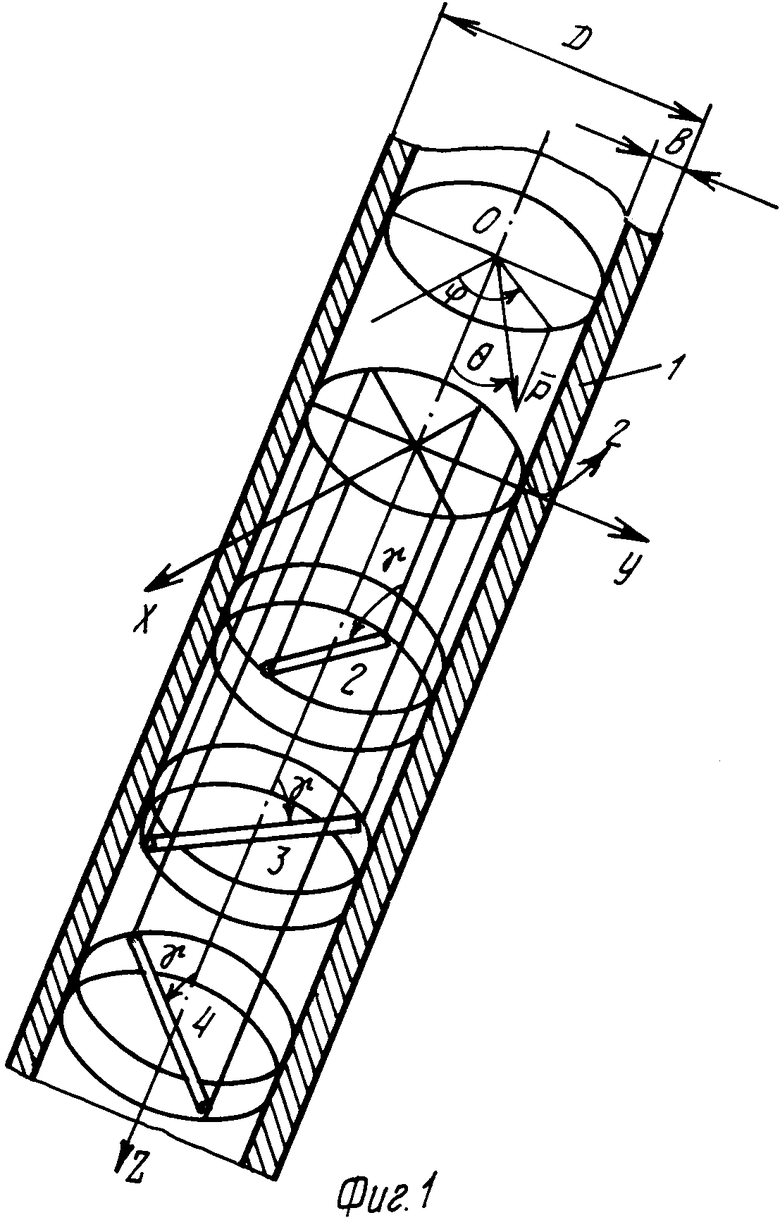
На фиг.1 представлена схема конструкции датчика магнитного азимута; на фиг.2 - то же, в направлении продольной оси корпуса.
Датчик содержит цилиндрический корпус 1, три стержневых дифференциальных феррозонда 2, 3, 4, установленных таким образом, что их оси чувствительности расположены под одинаковыми острыми узлами γ к продольной оси корпуса, а углы между проекциями осей чувствительности на плоскость поперечного сечения корпуса составляют 120о.
В процессе работы датчика магнитного азимута обмотки возбуждения феррозондов 2-4 запитываются переменным током. В результате на выходах сигнальных обмоток феррозондов 2-4 возникают сигналы, уровни которых пропорциональны величинам проекций вектора геомагнитного поля на оси чувствительности соответствующих феррозондов. Сигналы феррозондов преобразуются и измеряются с помощью одной из известных схем преобразований.
Измеренные значения сигналов феррозондов 2-4 U2, U3, U4 образуют вектор информационных сигналов  = (U2, U3, U4), по которому путем вычислений определяется измеренное значение вектора геомагнитного поля
= (U2, U3, U4), по которому путем вычислений определяется измеренное значение вектора геомагнитного поля  = C
= C (11), где С2 - матрица направляющих косинусов осей чувствительности феррозондов 2-4 в базисе В (OXYZ), связанном с корпусом 1 (фиг.1), имеющая вид (9). По величинам координат вектора
(11), где С2 - матрица направляющих косинусов осей чувствительности феррозондов 2-4 в базисе В (OXYZ), связанном с корпусом 1 (фиг.1), имеющая вид (9). По величинам координат вектора  = (h1,h2,h3) вычисляется магнитный азимут
= (h1,h2,h3) вычисляется магнитный азимут
α = arctg  (12), где θ,ϕ - значения зенитного и визирного углов, измеренные с помощью соответствующих датчиков, используемых совместно с датчиком магнитного азимута. Алгоритмы обработки измерительной информации (11), (12) реализуются в вычислительных устройствах, работающих совместно с инклинометрической аппаратурой, в которой используется датчик магнитного азимута.
(12), где θ,ϕ - значения зенитного и визирного углов, измеренные с помощью соответствующих датчиков, используемых совместно с датчиком магнитного азимута. Алгоритмы обработки измерительной информации (11), (12) реализуются в вычислительных устройствах, работающих совместно с инклинометрической аппаратурой, в которой используется датчик магнитного азимута.
Предлагаемый датчик магнитного азимута в сравнении с устройством-прототипом обеспечивает большую точность измерения азимута, так как в нем в значительной степени уменьшается влияние точности установки осей чувствительности феррозондов на точность измерения азимута. При одинаковой с прототипом точности измерения азимута, одинаковой длине применяемых стержневых феррозондов и γ < 67,3624опредлагаемый датчик имеет меньший, чем у прототипа, диаметр корпуса, что является важным достоинством при его использовании в малогабаритной инклинометрической аппаратуре.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТРИЧЕСКИЙ ДАТЧИК | 2002 |
|
RU2235200C2 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНЫХ ФЕРРОЗОНДОВЫХ МАГНИТОМЕТРОВ | 2022 |
|
RU2793283C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ОРИЕНТАЦИИ СКВАЖИНЫ И ИНКЛИНОМЕТР | 2003 |
|
RU2253838C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
Использование: в промысловой геофизике. Сущность изобретения: датчик содержит три жестко закрепленных в корпусе инклинометра стержневых феррозонда, оси чувствительности которых расположены симметрично относительно продольной оси корпуса и образуют с ней одинаковые острые углы γ < 67.3624° , при этом проекции осей феррозондов на плоскость, нормальную к продольной оси корпуса, расположены между собой под углом 120°. 2 ил.
ДАТЧИК МАГНИТНОГО АЗИМУТА, содержащий цилиндрический корпус и три жесткозакрепленных в нем стержневых феррозонда, два из которых установлены с образованием одинаковых углов между их осями чувствительности и продольной осью цилиндрического корпуса, отличающийся тем, что, с целью повышения точности измерений, третий стержневой феррозонд установлен с образованием между своей осью чувствительности и продольной осью цилиндрического корпуса угла, равного углам, образованным осями чувствительности каждого из двух стержневых феррозондов и продольной осью цилиндрического корпуса, при этом стержневые феррозонды расположены в цилиндрическом корпусе с образованием между проекциями их осей чувствительности на плоскость поперечного сечения цилиндрического корпуса углов 120o, а значение угла между осью чувствительности каждого стержневого феррозонда и продольной осью цилиндрического корпуса меньше 67, 3624o.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля комплекса параметров искривления скважин | 1984 |
|
SU1208208A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
