Изобретение может найти применение в промысловой геофизике. Преимущественно изобретение может быть использовано, например, при инклинометрии скважин.
Известен способ определения зенитного и азимутального углов посредством магнитометрического инклинометра, содержащего в корпусе скважинного прибора три жестко закрепленных с корпусом феррозонда и три акселерометра, оси чувствительности которых попарно совпадают и образуют ортогональную измерительную систему координат (Г.Н.Ковшов, Р.И.Алимбеков, А.В.Жибер. Инклинометры (основы теории и проектирования) Уфа: Гилем, 1998. – 380 с. с. 51-68), включающий в себя последующие операции: опускание инклинометра на определенную глубину, измерение с помощью феррозондов компонентов полного вектора геомагнитного поля Земли, определения по показаниям акселерометров компонентов полного вектора ускорения силы тяжести в измерительной системе координат и вычисления по полученным данным промежуточных значений азимутального и зенитного углов по формулам:
где  - величины, пропорциональные сигналам, выдаваемым феррозондами и акселерометрами соответственно, а
- величины, пропорциональные сигналам, выдаваемым феррозондами и акселерометрами соответственно, а  .
.
Недостатком данного способа является наличие синусоидальной ошибки определения зенитного и азимутального углов, т.к. измерители ускорений и геомагнитного поля участвуют во вращении скважинного прибора вокруг продольной оси (по апсидальному углу).
Наиболее близким по технической сущности и достигаемому результату к предлагаемому способу является способ определения азимута и зенитного угла скважины посредством гироскопического инклинометра (пат. РФ №2100594, приоритет от 09.02.1996 г. МКИ Е 21 В 47/02), включающий измерение ускорения силы тяжести по двум взаимно перпендикулярным осям, измерение угловой скорости относительно одной из вышеназванных осей посредством трехстепенного гироскопа, определение начальной ориентации осей чувствительности измерителей ускорений, в котором ось чувствительности измерителя угловой скорости стабилизируют относительно оси, совпадающей с продольной осью скважинного прибора, на каждом шаге работы вычислителя при движении скважинного прибора в скважине определяют азимут и зенитный угол скважины, например, по формулам:
 где
где  +1 - текущий шаг работы вычислителя;
+1 - текущий шаг работы вычислителя;
 - элементы матрицы ориентации Ai+1, которую формируют в виде произведения матриц Аi+l=ΔАi+l*Аi, где Аi, Аi+1 - матрицы ориентации на предыдущем и текущем шагах работы вычислителя;
- элементы матрицы ориентации Ai+1, которую формируют в виде произведения матриц Аi+l=ΔАi+l*Аi, где Аi, Аi+1 - матрицы ориентации на предыдущем и текущем шагах работы вычислителя;
 - приращение матрицы
- приращение матрицы
ориентации, элементы которой определяют в зависимости от углов ориентации θx, θy, θz, по формулам
где  - угловая скорость дрейфа осей чувствительности измерителей ускорения и угловой скорости относительно оси стабилизации;
- угловая скорость дрейфа осей чувствительности измерителей ускорения и угловой скорости относительно оси стабилизации;
Ωiуп - проекция угловой скорости вращения Земли на ось стабилизации;
 - элементы матрицы ориентации, формируемые по результатам измерения проекций
- элементы матрицы ориентации, формируемые по результатам измерения проекций  ускорения силы тяжести
ускорения силы тяжести  ;
;
τ - период дискретизации работы вычислителя, причем начальное значение матрицы ориентации равно
где αXB - азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки.
Недостатками известного способа, принятого за прототип, являются необходимость определения начальной ориентации осей чувствительности измерителей ускорений, ошибка определения начальной ориентации, невозможность обеспечения полной компенсации систематического дрейфа гироскопа, влияющего на точность определения азимута и траектории скважины.
Задачей изобретения является повышение точности определения азимута скважины при непрерывном движении скважинного прибора в скважине.
Указанная цель обеспечивается тем, что в способе определения азимута и зенитного угла скважины посредством инклинометра, включающем в себя измерение ускорения силы тяжести по двум взаимно перпендикулярным осям с последующим вычислением зенитного угла, например, по формуле:

 (1)
(1)
согласно изобретению производят измерение с помощью феррозондов компонентов полного вектора геомагнитного поля Земли с последующим вычислением по полученным данным азимута, например, по формуле:
 (2)
(2)
где  - текущий шаг работы вычислителя,
- текущий шаг работы вычислителя,
 (
( =1, 2, 3; q=1, 2, 3) - элементы матрицы ориентации А, и для устранения ошибки определения азимута в окрестности "критической" плоскости в процессе работы прибора расчет азимута производят по двум формулам:
=1, 2, 3; q=1, 2, 3) - элементы матрицы ориентации А, и для устранения ошибки определения азимута в окрестности "критической" плоскости в процессе работы прибора расчет азимута производят по двум формулам:
 (3)
(3)
где  - величины, пропорциональные сигналам, выдаваемым феррозондами и акселерометрами,
- величины, пропорциональные сигналам, выдаваемым феррозондами и акселерометрами,  , и
, и

где  (
( =1, 2, 3; q=1, 2, 3) – элементы матрицы ориентации А, и постоянно находят разность Δα между этими значениями, а в случае приближения ориентации прибора к "критической" плоскости, проходящей через вектор магнитного поля Земли и ось "запад-восток" в магнитной системе координат, расчет азимута производят по формуле (2) с учетом погрешности Δα, определенной ранее.
=1, 2, 3; q=1, 2, 3) – элементы матрицы ориентации А, и постоянно находят разность Δα между этими значениями, а в случае приближения ориентации прибора к "критической" плоскости, проходящей через вектор магнитного поля Земли и ось "запад-восток" в магнитной системе координат, расчет азимута производят по формуле (2) с учетом погрешности Δα, определенной ранее.
К существенным отличиям предложенного способа по сравнению с прототипом относится то, что вместо математического определения меридиана (начальная выставка) и привязки его к корпусу инклинометра с последующим непрерывным математическим поддержанием осей ориентации в пространстве производится непрерывная физическая ориентация одного из феррозондов в плоскости запад-восток, а азимут определяется углом поворота рамки, что исключает ошибки измерения, присущие прототипу и в конечном итоге повышает точность.
Сущность изобретения поясняется чертежами, приведенными на фиг.1 - 5, где:
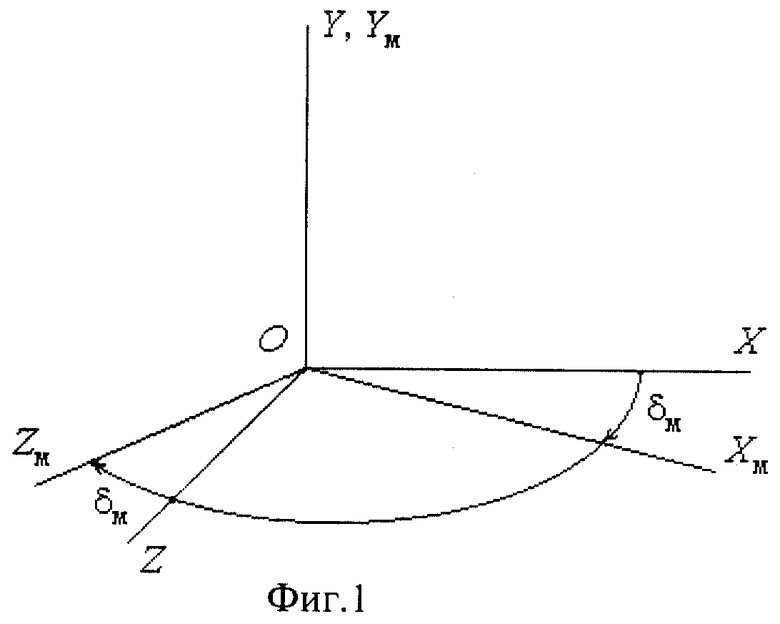
фиг.1 - Схема, иллюстрирующая связь магнитной и географической систем координат;
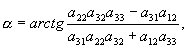
фиг.2 - Ориентация приборной системы координат относительно магнитной системы координат;
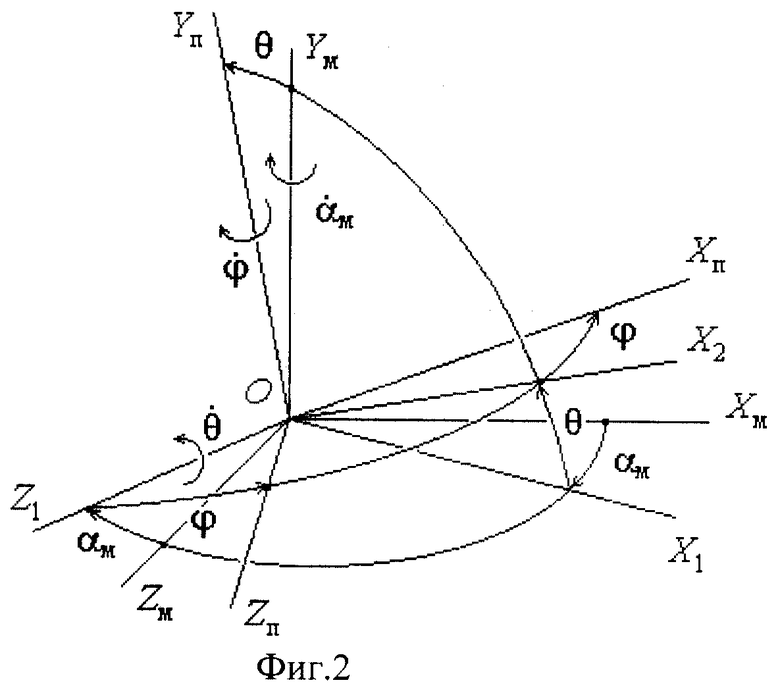
фиг.3 – Схема, показывающая плоскость χ;
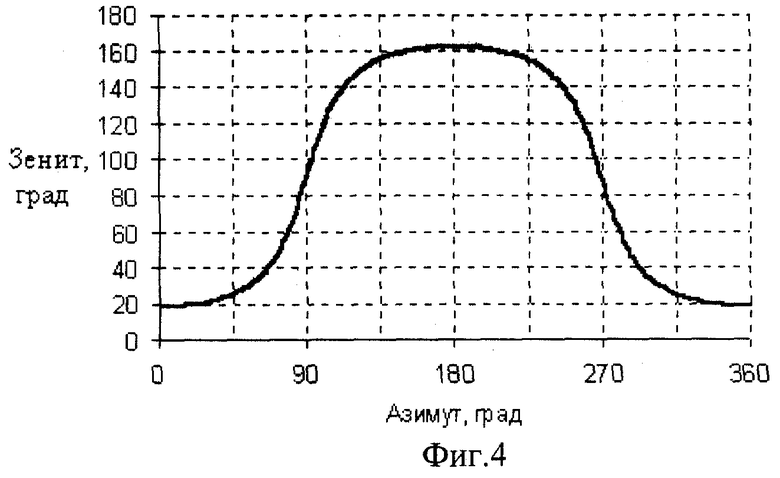
фиг.4 - Зависимость зенитного угла от азимутального при выполнении условия (16);
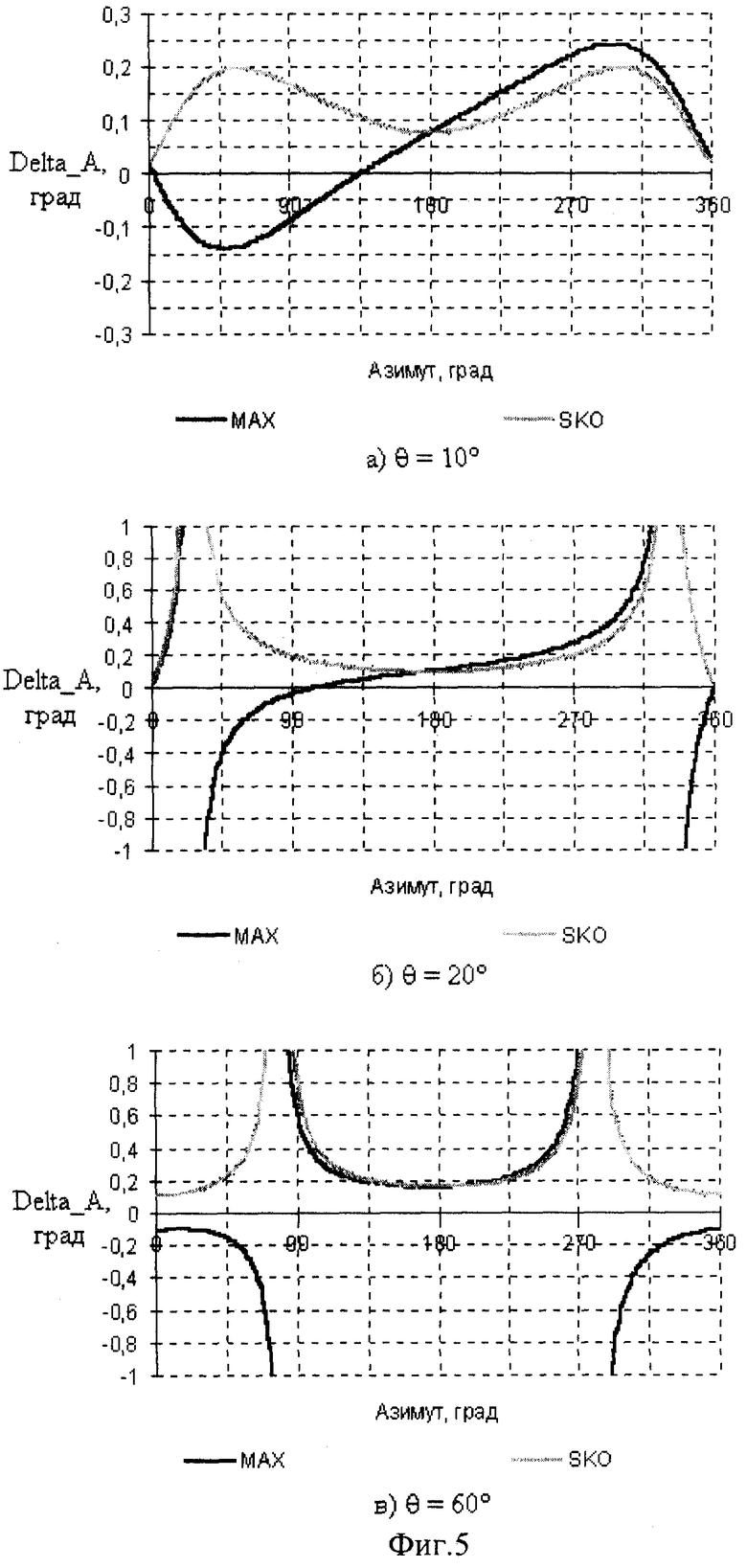
Фиг.5 - Абсолютная погрешность определения азимута при различных значениях зенита и заданных погрешностях Δθ = 0.05°, Δϕ = 0.05° (3 угл. мин).
Системы координат, принятые на чертежах:
OXYZ - земная географическая система координат, причем ось ОХ лежит в горизонтальной плоскости и направлена на географический север, ось OY направлена вертикально вверх, ось OZ дополняет систему координат до правой;
ОХмYмZм - магнитная система координат, где ось ОХм лежит в горизонтальной плоскости и направлена на северный магнитный полюс, ось ОYм направлена вертикально вверх, ось OZм дополняет систему координат до правой;
ОХпYпZп - система координат, связанная с измерительными осями датчиков (акселерометров и феррозондов), расположенных на вращающейся платформе, причем ось ОХп перпендикулярна плоскости платформы; ось OYп направлена вертикально вверх и совпадает с осью вращения платформы; ось OZп дополняет систему координат до правой.
Предложенный способ реализуется следующим образом.
Измерительные оси акселерометров и феррозондов, расположенных на платформе, совпадают с осями приборной системы координат.
Считая, что ориентация скважины и прибора совпадает, определим ориентацию прибора двумя углами: азимутальным α и зенитным θ. При этом азимут относительно географической системы координат связан с "магнитным" азимутом следующим соотношением:
α=αм+δм, (5)
где δм - магнитное склонение (фиг.1).
Пространственное положение приборной системы координат ОХпYпZп относительно магнитной можно определить, зная три угла: азимутальный αм, зенитный θ и угол ϕ разворота приборной системы координат относительно продольной оси прибора (фиг.2).
В соответствии с этим связь приборной системы координат ОХпYпZп с магнитной системой координат ОХмYмZм осуществляется через матрицу ориентации:

где α - магнитный азимут (здесь и далее индекс "м" опущен).
Матрица ориентации (2) является ортогональной, т.е.
Вектор напряженности магнитного поля Земли в магнитной системе координат имеет вид:
где Тх= Т0 COSϕм, Ту = - Т0sinϕм, ϕм - наклонение магнитного поля Земли в данной точке местности.
Вектор магнитного поля Земли в приборной системе координат связан с вектором магнитного поля Земли в магнитной системе координат следующим образом:
Сигналы с феррозондов совпадают с проекциями вектора (9):
Особенность описываемого способа заключается в том, что в скважинном приборе платформа с расположенными на ней акселерометрами и феррозондами в каждый момент времени ориентируется таким образом, что сигнал с определенного феррозонда равен нулю

Из данного условия в соответствии с матрицей ориентации (2) можно получить соотношение для углов α, θ, ϕ:

Элементы  матрицы ориентации определяются по сигналам акселерометров в соответствии с формулами
матрицы ориентации определяются по сигналам акселерометров в соответствии с формулами 
Из соотношения (10) определим:
Из условия ортогональности матрицы А:  , откуда
, откуда

Расписав отношение элементов матрицы  через углы α, θ, ϕ в соответствии со значениями (2), определим:
через углы α, θ, ϕ в соответствии со значениями (2), определим:
Выбирая знак коэффициента (12) и вычисляя азимут из выражения (13), получим четыре значения азимутального угла. Истинное значение азимутального угла определяется из двух условий:
1) рассчитанное в соответствии с выражением (11) значение угла ϕ должно быть равно значению угла ϕ, определенному непосредственно по сигналам акселерометров:
при этом исключаются два из четырех найденных значений азимута;
2) знак проекции вектора магнитного поля на ось ОХп: должен совпадать со знаком сигнала феррозонда fх. (Для исключения неоднозначности ориентацию платформы необходимо осуществлять исходя из двух условий: fz = 0, fx>0).
должен совпадать со знаком сигнала феррозонда fх. (Для исключения неоднозначности ориентацию платформы необходимо осуществлять исходя из двух условий: fz = 0, fx>0).
Согласно выражению (11) и с учетом условия fx>0 каждому значению зенитного угла θ и азимутального угла α соответствует единственное значение угла ϕ разворота плоскости платформы относительно вертикальной плоскости.
Таким образом, точность определения азимута будет зависеть от точности определения углов θ и ϕ по сигналам акселерометров. В то же время точность будет определяться и ориентацией прибора относительно магнитной системы координат (истинными значениями зенитного и азимутального углов).
Обозначим абсолютные погрешности измерения зенитного и азимутального углов и угла разворота ϕ через Δθ, Δα и αϕ. В соответствии с выражением (11) можно записать:

Считая приращения Δϕ, Δα, Δθ достаточно малыми, получим:

Рассмотрим отдельно влияние точности определения угла ϕ и угла θ на точность определения азимута.
1. Полагаем, что Δθ = 0, Δϕ ≠ 0.
Подставив значение tgϕ (11) в выражение (14), после преобразования получим:

Из выражения (15) следует, что при выполнении условия
предел отношения Δα/Δϕ стремится к бесконечности:
Выполнение условия (15) соответствует расположению прибора в плоскости, проходящей через вектор магнитного поля Земли и ось "запад-восток" в магнитной системе координат (фиг.3, плоскость χ), следовательно, при ориентации прибора в окрестности данной плоскости ошибка определения азимута резко возрастает.
Зависимость "критического" значения зенитного угла от азимута показана на фиг.4. Угол ϕм наклона магнитного поля Земли взят равным 72°, что примерно соответствует углу наклона магнитного поля Земли на широте 55,53°
2. Полагаем, что Δθ≠θ, Δϕ=0.
По аналогии с п.1 определим предел отношения Δα/Δθ:

Как видно из выражения (17), с точки зрения влияния ошибки по зенитному углу на точность определения азимута условие (16) также является критическим.
В соответствии с выражениями (15), (17) при приближении ориентации прибора к "критической" плоскости (фиг.3) погрешность определения азимутального угла возрастает до бесконечности. Для устранения данной ошибки в процессе работы прибора расчет азимута производится по двум формулам:
 (3)
(3)
где  - величины, пропорциональные сигналам, выдаваемым феррозондами и акселерометрами,
- величины, пропорциональные сигналам, выдаваемым феррозондами и акселерометрами,  , и
, и

где  ,
,  , q
, q [1, 3] - элементы матрицы ориентации А; и постоянно находится разность Δα между этими значениями. Если прибор не находится в "критической " плоскости, то значение азимута, рассчитанное по второй формуле, считается более точным и принимается за истинное. В случае приближения ориентации скважинного прибора к "критической" плоскости расчет азимута производится по первой формуле с учетом погрешности Δα, определенной ранее.
[1, 3] - элементы матрицы ориентации А; и постоянно находится разность Δα между этими значениями. Если прибор не находится в "критической " плоскости, то значение азимута, рассчитанное по второй формуле, считается более точным и принимается за истинное. В случае приближения ориентации скважинного прибора к "критической" плоскости расчет азимута производится по первой формуле с учетом погрешности Δα, определенной ранее.
За условие перехода расчета азимута по первой либо второй формуле можно выбрать, например, границы зоны по зенитному или азимутальному углу в районе "критической" плоскости, при приближении к которой осуществляется переход.
Использование предлагаемого способа в сравнение с прототипом обеспечивает повышение точности измерений за счет отсутствия ошибки, вызванной остаточным систематическим дрейфом гироскопа, а также отсутствия необходимости определения начальной ориентации осей чувствительности измерителей ускорений, что выгодно отличает предлагаемый способ определения азимута и зенитного угла скважины от прототипа.
Для определения численных результатов было проведено математическое моделирование влияния точности зенитного угла θ и угла разворота платформы ϕ на точность определения азимута при различных номинальных значениях зенита и азимута. Значения абсолютных погрешностей зенита и угла разворота ϕ взяты равными, например, Δθ = 0.05°, Δϕ = 0.05° (фиг.5), что соответствует трем угловым минутам (такая точность измерения зенитного и апсидального (угла разворота) углов достигнута в существующих инклинометрах МИНК-42-100/50 и ИГН-73-100/80 производства 000 “Арас-плюс”, г. Арзамас, при вычислениях способами, указанными в аналоге и прототипе); угол наклона магнитного поля Земли - ϕм=15°. Максимальной (МАХ, фиг.5) обозначена абсолютная ошибка определения азимута.
Из моделирования видно, что точность определения азимута не в зоне, близкой к критической плоскости, не превышает 0.2 градуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ | 2002 |
|
RU2231638C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ МАГНИТНОЙ ДЕВИАЦИИ ИНКЛИНОМЕТРА | 2000 |
|
RU2186966C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| ДАТЧИК МАГНИТНОГО АЗИМУТА | 1990 |
|
RU2018646C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| СПОСОБ СКВАЖИННОЙ ИНКЛИНОМЕТРИИ И СКВАЖИННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2770874C1 |
Изобретение относится к промысловой геофизике и может использоваться при инклинометрии скважины. Техническим результатом изобретения является повышение точности определения азимута скважины при непрерывном движении скважинного прибора. При реализации способа инклинометром измеряют ускорение силы тяжести по двум взаимно перпендикулярным осям и вычисляют зенитный угол скважины. Производят измерения компонентов полного вектора магнитного поля Земли. При этом непрерывно ориентируют феррозонд, расположенный по оси Z в плоскости “запад-восток”. При таком способе азимут будет пропорционален углу поворота рамки, который определяют с помощью акселерометров. По полученным данным вычисляют азимут. Для устранения ошибки азимута в окрестности “критической” плоскости расчет азимута производят по двум приведенным математическим выражениям. Затем постоянно находят разность между вычисленными значениями. В случае приближения ориентации прибора к “критической” плоскости, проходящей через вектор магнитного поля Земли и ось “запад-восток” в магнитной системе координат, расчет азимута производят по одной из формул с учетом вычисленной ранее погрешности. 5 ил.
Способ определения азимута и зенитного угла скважины посредством инклинометра, включающий измерение ускорения силы тяжести по двум взаимно перпендикулярным осям с последующим вычислением зенитного угла, например, по формуле

 (1)
(1)
отличающийся тем, что производят измерение с помощью феррозондов компонентов полного вектора геомагнитного поля Земли с последующим вычислением по полученным данным азимута, например, по формуле

 (2)
(2)
где  - текущий шаг работы вычислителя,
- текущий шаг работы вычислителя,
 (
( =1, 2, 3; q=1, 2, 3) - элементы матрицы ориентации А, и для устранения ошибки определения азимута в окрестности "критической" плоскости в процессе работы прибора расчет азимута производят по двум формулам
=1, 2, 3; q=1, 2, 3) - элементы матрицы ориентации А, и для устранения ошибки определения азимута в окрестности "критической" плоскости в процессе работы прибора расчет азимута производят по двум формулам
 (3)
(3)
где  -величины, пропорциональные сигналам, выдаваемым феррозондами и акселерометрами,
-величины, пропорциональные сигналам, выдаваемым феррозондами и акселерометрами,  , и
, и

где  (
( =1, 2, 3; q=1, 2, 3) - элементы матрицы ориентации А, и постоянно находят разность ?α между этими значениями, а в случае приближения ориентации прибора к "критической " плоскости, проходящей через вектор магнитного поля Земли и ось "запад-восток" в магнитной системе координат, расчет азимута производят по формуле (2) с учетом погрешности ?α, определенной ранее.
=1, 2, 3; q=1, 2, 3) - элементы матрицы ориентации А, и постоянно находят разность ?α между этими значениями, а в случае приближения ориентации прибора к "критической " плоскости, проходящей через вектор магнитного поля Земли и ось "запад-восток" в магнитной системе координат, расчет азимута производят по формуле (2) с учетом погрешности ?α, определенной ранее.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Способ измерения положения снаряда в скважине | 1982 |
|
SU1076573A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Инклинометр | 1990 |
|
SU1788224A1 |
| RU 2004786 C1, 15.12.1993 | |||
| RU 2002129647 A, 27.04.2004 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА ПЛОСКОСТИ НАКЛОНЕНИЯ СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165524C2 |
| US 4163324 A, 10.08.1979 | |||
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ГИБКИХ ТРУБ | 2013 |
|
RU2541366C1 |
| Машина для формования железобетонных тонкостенных пространственных криволинейных покрытий сводов двойной кривизны | 1957 |
|
SU109830A1 |

