Изобретение относится к области бурения наклонно направленных и горизонтальных скважин, в частности - к определению угловых параметров пространственной ориентации бурового инструмента (азимута, зенитного угла и угла установки отклонителя в апсидальной плоскости).
Известен способ измерения зенитных и азимутальных углов (патент РФ 2231638, Е21В 47/02, опубл. 27.06.2004). Устройство содержит трехкомпонентный феррозондовый и трехкомпонентный акселерометрический преобразователи. По показаниям феррозондов определяют компоненты полного вектора геомагнитного поля Земли, а по показаниям акселерометров определяют компоненты полного вектора силы тяжести. По полученным данным вычисляют текущие значения азимутального и зенитного углов. Далее производят сравнение текущего замера со средним значением четырех замеров, отстающих от текущего на четыре записи, относительно допуска. Если текущий замер находится за пределами допуска, то его заменяют на среднее. После этого производят осреднение определенного числа предыдущих замеров и заменяют значение текущего измерения на осредненное. Затем производят фильтрацию посредством режекторного фильтра.
Известен также способ определения углов искривления скважины (патент РФ 2503810, Е21В 47/022, опубл. 10.01.2014), позволяющий осуществлять проведение измерений в обсаженной и необсаженной скважинах, повышение точности реализующего его устройства за счет совместного применения феррозондов и гироскопов, а также компенсации дрейфа последних. Предложен способ определения углов искривления скважины, включающий измерение проекций напряженности магнитного поля феррозондами, измерение проекций ускорения свободного падения акселерометрами, измерение проекций угловой скорости Земли гироскопами на оси инклинометра, преобразование первичных сигналов и определение пространственной ориентации ствола скважины.
Недостатком этих способов является отсутствие учета влияния малых угловых параметров отклонения осей чувствительности трехкомпонентного феррозондового и трехкомпонентного акселерометрического преобразователей инклинометрических систем от ортогональных осей.
Наиболее близким по технической сущности и достигаемому результату является способ определения направления скважины (варианты) (патент РФ №2109943, Е21В 47/022, 27.04.1998) во время ее бурения с помощью трехосевого блока акселерометр/магнитометр, размещенного в используемой бурильной колонне, в котором осуществляют измерение составляющих gx, gy, gz ускорения известного местного вектора  силы тяжести, по которым определяют зенитный θ и визирный ϕ углы, измеряют компоненты mx, my, mz полного вектора
силы тяжести, по которым определяют зенитный θ и визирный ϕ углы, измеряют компоненты mx, my, mz полного вектора  напряженности геомагнитного поля, по которым определяют азимут α при известных mx, my, mz, θ и ϕ.
напряженности геомагнитного поля, по которым определяют азимут α при известных mx, my, mz, θ и ϕ.
Недостатком прототипа является невысокая точность определения искомых углов θ и ϕ по измеренным сигналам gx, gy, gz с трехкомпонентного акселерометра и α по измеренным сигналам mx, my, mz с трехкомпонентного магнитометра, обусловленная тем, что при обработке результатов измерений не учитывают малые угловые параметры отклонения осей чувствительности датчиков в трехосевом блоке акселерометр/магнитометр от осей ортонормированных базисов корпуса скважинного прибора.
Задачей, на решение которой направленно заявляемое изобретение, является повышение точности определения комплекса искомых угловых параметров пространственной ориентации бурового инструмента - α, θ и ϕ.
Технический результат - уменьшение погрешности измерений инклинометрических систем за счет учета малых угловых параметров отклонения осей чувствительности трехкомпонентных феррозондовых и акселерометрических датчиков инклинометрических систем от ортогональных осей при обработке результатов измерений.
Технический результат достигается тем, что в способе определения направления скважины во время ее бурения с помощью трехосевого блока акселерометр/магнитометр, включающем установку в корпусе скважинного прибора трехосевого блока акселерометр/магнитометр, с помощью которого осуществляют измерение составляющих gx, gy, gz известного вектора  ускорения силы тяжести, измеряют компоненты mx, my, mz полного вектора
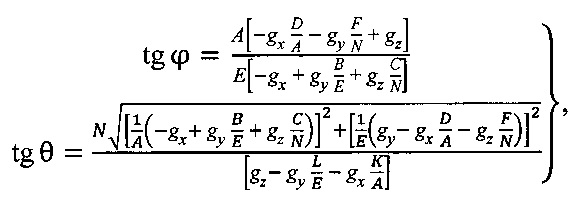
ускорения силы тяжести, измеряют компоненты mx, my, mz полного вектора  напряженности геомагнитного поля, по которым определяют азимут α, зенитный θ и визирный ϕ углы, при этом используя априорно определенные численные значения малых угловых параметров χA, δXA, δYA, σ1A, σ2A для трехосевого акселерометра и χF, γF, δXF, δYF, σ1F, σ2F для трехосевого магнитометра, которые характеризуют отклонение осей чувствительности датчиков блока акселерометр/магнитометр от осей ортонормированных базисов корпуса скважинного прибора, зенитный θ и визирный ϕ углы определяют по измеренным сигналам gi(i=x,y,z) с учетом малых угловых параметров χA, δХА, δYA, σ1А, σ2A, а азимут α определяют по измеренным сигналам mi=(i=x,y,z) вычисленным θ и ϕ с учетом малых угловых параметров χF, γF, δYF δ1F, σ1F, σ2F, кроме того, согласно изобретению зенитный θ и визирный углы ϕ определяют по формулам:
напряженности геомагнитного поля, по которым определяют азимут α, зенитный θ и визирный ϕ углы, при этом используя априорно определенные численные значения малых угловых параметров χA, δXA, δYA, σ1A, σ2A для трехосевого акселерометра и χF, γF, δXF, δYF, σ1F, σ2F для трехосевого магнитометра, которые характеризуют отклонение осей чувствительности датчиков блока акселерометр/магнитометр от осей ортонормированных базисов корпуса скважинного прибора, зенитный θ и визирный ϕ углы определяют по измеренным сигналам gi(i=x,y,z) с учетом малых угловых параметров χA, δХА, δYA, σ1А, σ2A, а азимут α определяют по измеренным сигналам mi=(i=x,y,z) вычисленным θ и ϕ с учетом малых угловых параметров χF, γF, δYF δ1F, σ1F, σ2F, кроме того, согласно изобретению зенитный θ и визирный углы ϕ определяют по формулам:
где

a gx, gy, gz - измеренные сигналы с датчиков трехосевого акселерометра, а затем определяют азимут α по формуле:

где
a mx, my, mz - приведенные значения измеренных сигналов с датчиков трехосевого магнитометра.
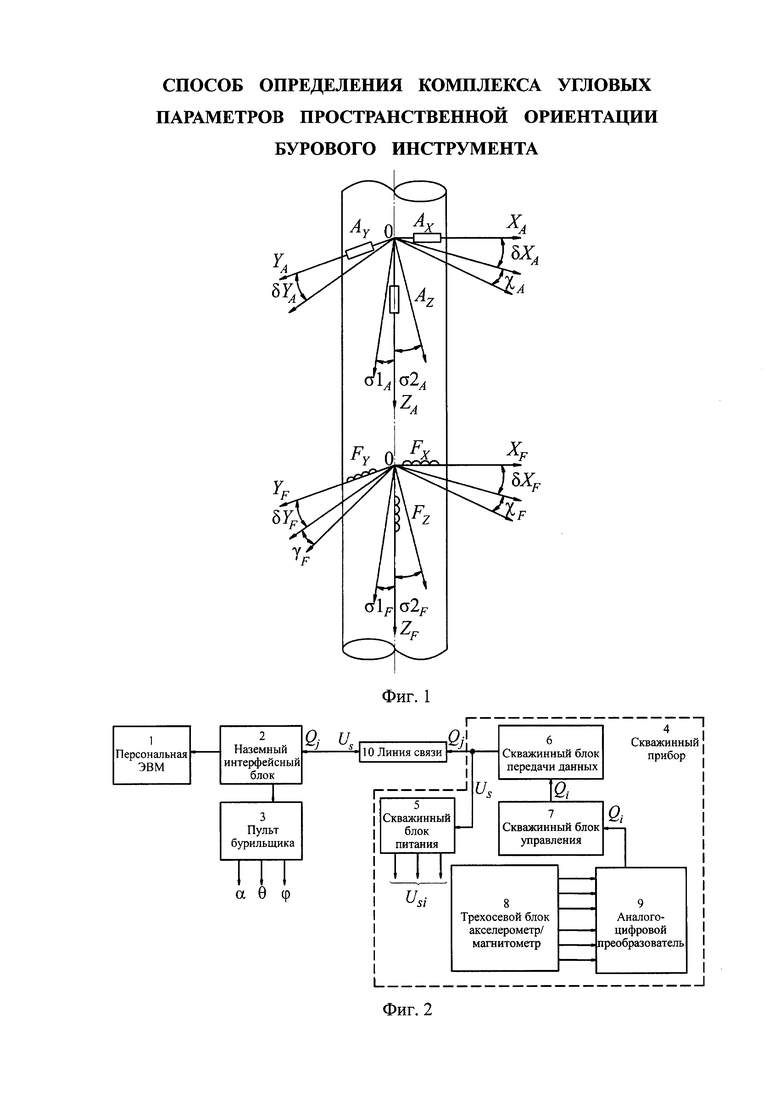
Существо изобретения поясняется чертежами. На фиг. 1 условно представлена схема трехосевого блока акселерометр/магнитометр, а на фиг. 2 - функциональная схема устройства, реализующего предложенный способ.
В начальном положении корпуса скважинного прибора (α=θ=ϕ=0) ортонормированные базисы 0XAYAZA и 0XFYFZF (фиг. 1) являются правыми системами координат, жестко связанными с корпусом, причем оси 0ZA и 0ZF совпадают с направлением вектора ускорения свободного падения, а ось 0ХА параллельна оси 0XF, которая ориентирована в плоскости горизонта и направлена на север магнитного меридиана.
Предложенный способ, реализуемый в устройстве (фиг. 2), содержит наземное оборудование, включающее персональную ЭВМ 1, наземный интерфейсный блок 2 и пульт бурильщика 3, а также скважинный прибор 4, включающий скважинный блок питания 5, скважинный блок передачи данных 6, скважинный блок управления 7, трехосевой блок акселерометр/магнитометр 8, многоканальный аналого-цифровой преобразователь 9, причем скважинный блок передачи данных 6 и скважинный блок питания 5 связаны с наземным интерфейсным блоком посредством линии связи 10.
Работа устройства заключается в следующем. Наземный интерфейсный блок 2, запитываемый от промышленной сети переменного напряжения, формирует постоянное напряжение Un, которое через линию связи 10 (например, одножильный каротажный кабель) поступает на вход скважинного блока питания 5, в котором отрабатываются необходимые параметры энергопотребления Uni для всех узлов и блоков скважинного прибора. При определенном фиксированном в пространстве положении скважинного прибора, т.е. при конкретных значениях α, θ и ϕ, аналоговые сигналы gi(i=x,y,z) с акселерометров AX, AY AZ, а также аналоговые сигналы mi(i=х,y,z) с феррозондов FX, FY и FZ, входящих в трехосевой блок акселерометр/магнитометр 8, поступают на входы многоканального аналого-цифрового преобразователя 9, в котором преобразуются в цифровые коды Qi, пропорциональные аналоговым сигналам gi и mi. Далее эти коды Qi в скважинном блоке передачи данных 6 преобразуются в последовательные помехоустойчивые коды Qj и через линию связи 10 поступают на вход наземного интерфейсного блока 2, который преобразует их в форму, удобную для передачи в ЭВМ, где осуществляется обработка поступившей информации в соответствии с заданным алгоритмом. В результате обработки по измеренным сигналам gi и mi получают искомые углы α, θ и ϕ, регистрируемые в ЭВМ 1, которые также через наземный интерфейсный блок 2 поступают в пульт бурильщика 3, осуществляющего визуальную индикацию текущих значений комплекса угловых параметров α, θ и ϕ пространственной ориентации бурового инструмента, жестко связанного с корпусом скважинного прибора. Циклическим опросом сигналов gi и mi, их аналого-цифровым преобразованием и преобразованием в последовательный помехоустойчивый код управляет скважинный блок управления 7.
Способ определения комплекса угловых параметров (α, θ и ϕ) пространственной ориентации бурового инструмента заключается в следующем. Априорно определяют численные значения малых угловых параметров (фиг. 1) χA, δXA, δYA, σ1A, σ2A для трехосевого акселерометра и χF, γf, δXF, δYF, σ1F, σ2F для трехосевого магнитометра, которые обусловлены разбросом размеров и полями допусков при изготовлении деталей и сборке трехосевого блока акселерометр/магнитометр, где:
- δХА - угол отклонения оси чувствительности акселерометра AX от оси 0ХА в плоскости 0XAZA;
- δYA - угол отклонения оси чувствительности акселерометра AY от оси 0YA в плоскости 0YAZA;
- χA и - угол отклонения оси чувствительности акселерометра AX от оси 0ХА в плоскости 0XAYA;
- σ1A - угол отклонения оси чувствительности акселерометра AZ от оси 0ZA в плоскости 0XAZA;
- σ2А - угол отклонения оси чувствительности акселерометра AZ от оси 0ZA в плоскости 0YAZA;
- δXF - угол отклонения оси чувствительности феррозонда FX от оси 0XF в плоскости 0XFZF;
- χF и - угол отклонения оси чувствительности феррозонда FX от оси 0XF в плоскости 0XFYF;
- δYF - угол отклонения оси чувствительности феррозонда FY от оси 0YF в плоскости OYFZF,
- γF - угол отклонения оси чувствительности феррозонда FY от оси 0YF в плоскости 0XFYF,
- σ1F - угол отклонения оси чувствительности феррозонда FZ от оси 0ZF в плоскости 0YFZF,
- σ2F - угол отклонения оси чувствительности феррозонда FZ от оси 0ZF в плоскости 0XFZF.
Далее осуществляют измерение сигналов gi и mi, характеризующих конкретное пространственное положение бурового инструмента, и передают в наземный интерфейсный блок помехоустойчивые коды Qj, пропорциональные сигналам gi и сигналам mi, а искомые угловые параметры (α, θ и ϕ) определяют следующим образом:
где


где
а mx, my, mz - приведенные значения измеренных сигналов с датчиков трехосевого магнитометра.
Пример конкретной реализации способа.
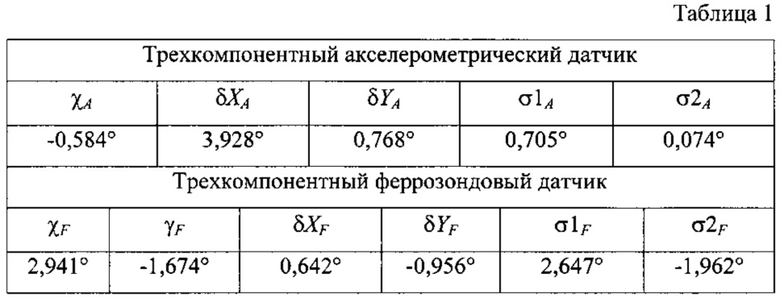
Определение искомых углов пространственной ориентации α, θ и ϕ производят на поверочной установке, например УАК-СИ-АЗВ, задавая различные положения корпуса скважинного прибора инклинометрической системы, и измеряя, и занося при этом в массив данных информационные сигналы с трехкомпонентных акселерометрических преобразователей и трехкомпонентных феррозондовых преобразователей инклинометрической системы. По значениям сигналов, хранящихся в массиве данных, рассчитывают искомые углы пространственной ориентации α, θ и ϕ с учетом априорно известных малых угловых параметров χA, δXA, δYA, σ1A, σ2А трехкомпонентного акселерометрического преобразователя и χF, γF, δXF, δYF, σ1F, σ2F трехкомпонентного феррозондового преобразователя, представленные в таблице 1.
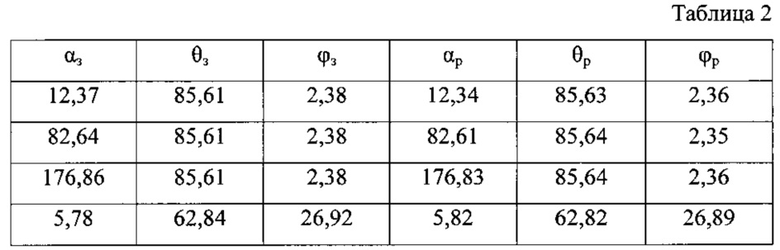
Для проверки заявляемого способа с использованием инклинометрической системы ИС-48 на поверочной установке УАК-СИ-АЗВ заданы определенные пространственные положения корпуса скважинного прибора αз, θз и ϕз и проведены измерения сигналов с трехкомпонентного акселерометрического преобразователя и трехкомпонентного феррозондового преобразователя и рассчитаны углы пространственной ориентации αр, θР и ϕр, представленные в таблице 2.
Итак, заявляемое изобретение позволяет повысить точность определения искомых угловых параметров пространственной ориентации бурового инструмента - азимута, зенитного угла и угла положения отклонителя, путем учета малых угловых параметров χA, δXA, δYA, σ1A, σ2A для трехосевого акселерометра и χF, γF, δXF, δYF, σ1F, σ2F для трехосевого магнитометра при обработке инклинометрических данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ИНКЛИНОМЕТРИЧЕСКИХ СИСТЕМ | 2015 |
|
RU2611567C1 |
| СПОСОБ СКВАЖИННОЙ ИНКЛИНОМЕТРИИ И СКВАЖИННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2770874C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИНЫ | 2014 |
|
RU2567064C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ ИНКЛИНОМЕТРА | 2013 |
|
RU2534866C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
Изобретение относится к области бурения наклонно направленных и горизонтальных скважин, в частности к определению угловых параметров пространственной ориентации бурового инструмента (азимута, зенитного угла и угла установки отклонителя в апсидальной плоскости). Технический результат: уменьшение погрешности измерений инклинометрических систем за счет учета малых угловых параметров отклонения осей чувствительности трехкомпонентных феррозондовых и акселерометрических датчиков инклинометрических систем от ортогональных осей при обработке результатов измерений. Сущность изобретения: в корпусе скважинного прибора устанавливают трехосевой блок акселерометр/магнитометр, с помощью которого осуществляют измерение проекций gx, gy, gz известного вектора  ускорения силы тяжести, измеряют проекции mx, my, mz полного вектора
ускорения силы тяжести, измеряют проекции mx, my, mz полного вектора  напряженности геомагнитного поля, по которым определяют азимут α, зенитный θ и визирный ϕ углы. При этом используют априорно определенные численные значения малых угловых параметров отклонения осей чувствительности датчиков: χА, δХА, δYА, σ1А, σ2А для трехосевого акселерометра и χF, γF, δXF, δYF, σ1F, σ2F для трехосевого магнитометра. 2 ил., 2 табл.
напряженности геомагнитного поля, по которым определяют азимут α, зенитный θ и визирный ϕ углы. При этом используют априорно определенные численные значения малых угловых параметров отклонения осей чувствительности датчиков: χА, δХА, δYА, σ1А, σ2А для трехосевого акселерометра и χF, γF, δXF, δYF, σ1F, σ2F для трехосевого магнитометра. 2 ил., 2 табл.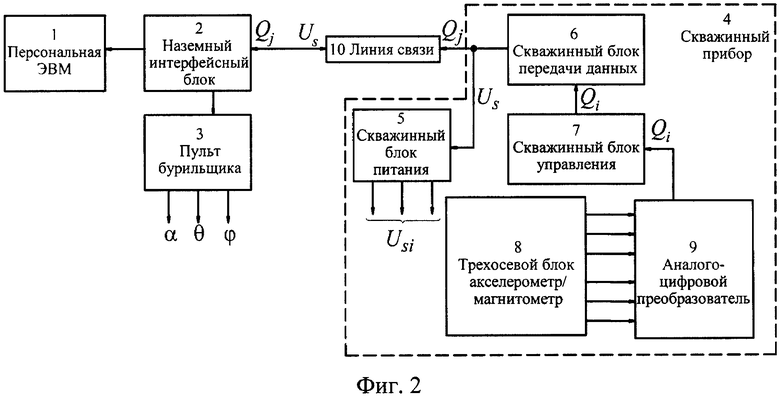
Способ определения направления скважины во время ее бурения с помощью трехосевого блока акселерометр/магнитометр, включающий установку в корпусе скважинного прибора трехосевого блока акселерометр/магнитометр, с помощью которого осуществляют измерение составляющих gx, gy, gz известного вектора  ускорения силы тяжести, измеряют компоненты mх, mу, mz полного вектора
ускорения силы тяжести, измеряют компоненты mх, mу, mz полного вектора  напряженности геомагнитного поля, по которым определяют азимут α, зенитный θ и визирный ϕ углы, отличающийся тем, что используют априорно определенные численные значения малых угловых параметров χА, δXA, δYA, σ1А, σ2A для трехосевого акселерометра и χF, γF, δXF, δYF, σ1F, σ2F для трехосевого магнитометра, которые характеризуют отклонение осей чувствительности датчиков блока акселерометр/магнитометр от осей ортонормированных базисов корпуса скважинного прибора, определяют по измеренным сигналам gi(i=x,y,z) зенитный θ и визирный ϕ углы с учетом малых угловых параметров χA, δХA, δYА, σ1А, σ2А, а азимут α определяют по измеренным сигналам mi(i=x,y,z), вычисленным θ и ϕ с учетом малых угловых параметров χF, γF, δXF, δYF, σ1F, σ2F при этом зенитный θ и визирный ϕ углы определяют по формулам:
напряженности геомагнитного поля, по которым определяют азимут α, зенитный θ и визирный ϕ углы, отличающийся тем, что используют априорно определенные численные значения малых угловых параметров χА, δXA, δYA, σ1А, σ2A для трехосевого акселерометра и χF, γF, δXF, δYF, σ1F, σ2F для трехосевого магнитометра, которые характеризуют отклонение осей чувствительности датчиков блока акселерометр/магнитометр от осей ортонормированных базисов корпуса скважинного прибора, определяют по измеренным сигналам gi(i=x,y,z) зенитный θ и визирный ϕ углы с учетом малых угловых параметров χA, δХA, δYА, σ1А, σ2А, а азимут α определяют по измеренным сигналам mi(i=x,y,z), вычисленным θ и ϕ с учетом малых угловых параметров χF, γF, δXF, δYF, σ1F, σ2F при этом зенитный θ и визирный ϕ углы определяют по формулам:
где

a gx, gy, gz - измеренные сигналы с датчиков трехосевого акселерометра, азимут α определяют по формуле:

где
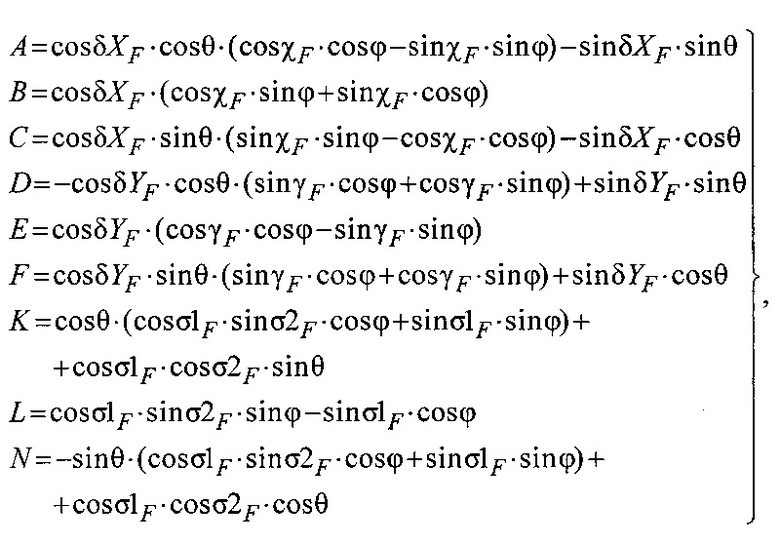
a mх, mу, mz - приведенные значения измеренных сигналов с датчиков трехосевого магнитометра.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ СКВАЖИНЫ (ВАРИАНТЫ) | 1994 |
|
RU2109943C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ | 2002 |
|
RU2231638C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ МАГНИТНОЙ ДЕВИАЦИИ ИНКЛИНОМЕТРА | 2000 |
|
RU2186966C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| US 4813274 A1, 21.03.1989 | |||
| СПОСОБ ЛАЗЕРНОГО ОБЛУЧЕНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ПОЛОСТИ БИОТКАНИ | 2011 |
|
RU2492882C2 |

