Изобретение относится к радиотехнике и может быть использовано в навигации, системах контроля и управления движением воздушного, водного и наземного транспорта.
Известны и широко используются азимутально-дальномерные радиотехнические системы, содержащие радиомаяк и бортовую аппаратуру, расположенную на подвижных объектах. При этом отечественная азимутально-дальномерная система ближней навигации РСБН позволяет определять местоположение подвижного объекта не только на нем самом, но и на наземном радиомаяке. Здесь для определения координат объектов на радиомаяке последним излучается сигнал "Запрос индикации", а на объектах формируются и излучаются сигналы "Ответ индикации" в моменты совпадения принятого сигнала "Запрос индикации" с сигналом азимута. Принятые на радиомаяке сигналы "Ответ индикации" соответствуют азимуту и дальности каждого объекта относительно радиомаяка. Определения местоположения других объектов на самих объектах эта система не обеспечивает (см. Современные системы ближней навигации летательных аппаратов. /Под ред. Г.А.Пахолкова. М.: Транспорт, 1986, с.46-74).
Однако указанные системы имеют недостаточную точность определения местоположения.
Известны импульсные радиотехнические системы определения местоположения, позволяющие с высокой точностью определять местоположение подвижных объектов разностно-дальномерным методом (см., например, Г.П.Астафьев, В.С. Шабшаевич, Ю. А. Юрков. Радионавигационные устройства и системы. М.: Сов, радио, с.656 или А.А.Сосновский и И.А.Хаймович. Авиационная радионавигация. М. : Транспорт, 1980, с.40, 61), состоящие из цепочки неподвижных опорных станций, излучающих последовательно одна за другой импульсные сигналы с периодом, задаваемым ведущей опорной станцией, и станций (приемоиндикаторов), установленных на подвижных объектах, на которых осуществляется прием излучаемых опорными станциями сигналов, измерение временных интервалов между ними и расчет координат данного подвижного объекта.
Однако системы, осуществляющие этот способ, не обеспечивают определение местоположения подвижных объектов на опорных станциях и других объектов на данном подвижном объекте. Разные принципы действия разностно-дальномерной и азимутально-дальномерной (угломерно-дальномерной) систем не позволяют реализовать во второй системе техническое решение задачи определения местоположения подвижных объектов на опорных станциях, использованные в первой системе.
Целью изобретения является повышение информативности за счет определения местоположения подвижного объекта с его идентификацией на опорных станциях и определение местоположения данного подвижного объекта на других подвижных объектах или командно-диспетчерских пунктах.
Для этого в разностно-дальномерной системе, использующей последовательное однo за другим излучение несколькими опорными станциями импульсных сигналов с периодом, задаваемым ведущей опорной станцией, прием этих сигналов на подвижных объектах, измерение временных интервалов между принятыми сигналами и расчет по величинам этих интервалов координат данного подвижного объекта, после приема на каждом подвижном объекте сигналов опорных станций с каждого подвижного объекта излучают импульсный радиосигнал с индивидуальной для каждого подвижного объекта задержкой относительно сигнала ведущей опорной станции, принимают эти сигналы на опорных станциях и переизлучают, принимают переизлученные сигналы на других опорных станциях, селектируют на опорных станциях принятые непосредственно и ретранслированные другими опорными станциями сигналы данного подвижного объекта, измеряют разности времен прихода этих сигналов и определяют местоположение данного подвижного объекта разностно-дальномерным методом.
Для идентификации принятых подвижным объектом сигналов с соответствующими опорными станциями излучаемые опорными станциями сигналы кодируют индивидуальным для каждой опорной станции кодом ("кодирование" понимается здесь и далее в широком смысле: окраска сигнала, позволяющая выделять его на фоне других. Это может быть отличие в несущей частоте, периоде следования, длительности импульсов, временном интервале между ними и т.д.), аналогично на опорных станциях кодируют ретранслированные сигналы подвижных объектов индивидуальным для данной опорной станции кодом, отличным от указанного, делят период повторения импульсов ведущей опорной станции не менее чем на n+1 интервалов, где n - число подвижных объектов (одному объекту может быть присвоено несколько временных интервалов), индивидуальную задержку излучения сигнала на подвижном объекте выбирают в соответствии с началом фиксированного для данного подвижного объекта одного из n временных интервалов, начиная со второго, селектируют сигналы на опорной станции по времени в пределах временного интервала, соответствующего данному подвижному объекту, а длительность временного интервала выбирают в соответствии с максимально возможной задержкой приема ретранслированного сигнала относительно момента излучения.
В целях дополнительного определения местоположения данного подвижного объекта на других подвижных объектах или командно-диспетчерских пунктах, расположенных в любой точке рабочей зоны системы, переизлученные опорными станциями сигналы данного подвижного объекта принимают на других подвижных объектах или командно-диспетчерских пунктах, осуществляют их временную селекцию в пределах временного интервала, соответствующего данному подвижному объекту, измеряют разности времен их прихода и определяют координаты данного подвижного объекта на других подвижных объектах или командно-диспетчерских пунктах по измеренным разностям и собственным координатам другого подвижного объекта или командно-диспетчерского пункта разностно-дальномерным методом, при этом длительность временного интервала выбирают в соответствии с максимально возможным временем задержки принятого на подвижном объекте ретранслированного опорными станциями сигнала относительно момента его излучения.
Сущность изобретения определяется тем, что благодаря индивидуальной задержке и излучению каждым подвижным объектом сигналов, приему и переизлучению этих сигналов опорными станциями появляется индивидуальная информация о времени приема сигналов от любого из подвижных объектов на каждой из опорных станций, что обеспечивает возможность определения местоположения всех объектов на любой опорной станции или подвижном объекте.
Приведенная совокупность признаков отсутствует в исследованной патентной и научно-технической литературе по данному вопросу, следовательно предложенное техническое решение соответствует критерию "новизна".
Неизвестны какие-либо устройства или системы, в которых определение координат всех подвижных объектов могло бы быть осуществлено на любом из этих объектов без непосредственного обмена информацией о координатах между ними, что позволяет утверждать, что предложенный способ и реализующая его система соответствуют критерию "существенности" отличия.
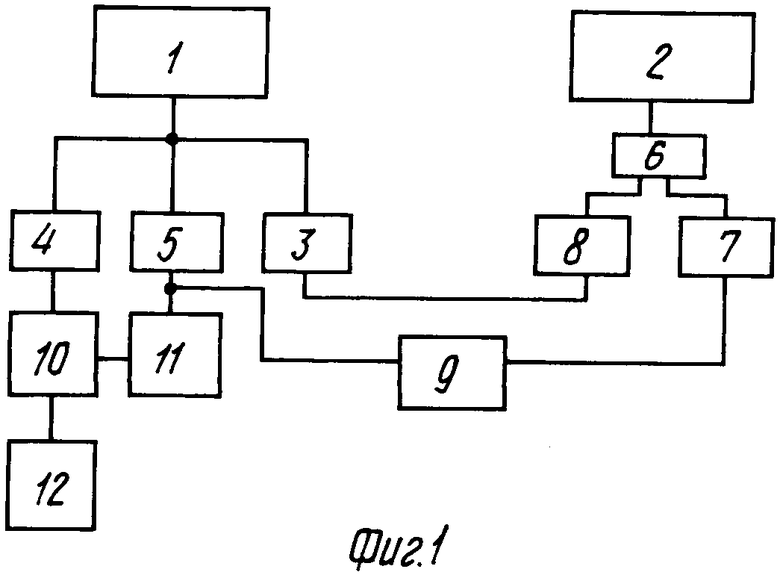
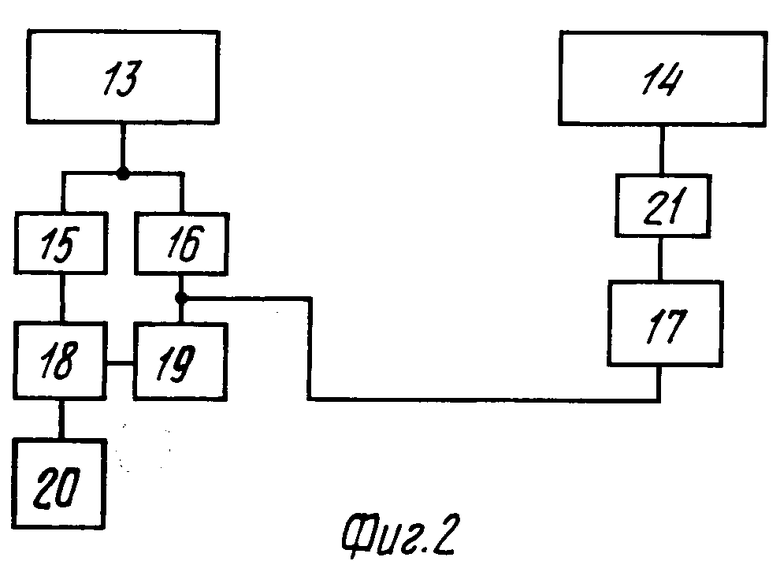
На фиг. 1 и 2 приведена структурная схема системы для осуществления предложенного способа.
Оборудование опорной станции (см. фиг.1) состоит из последовательно соединенных приемника 1, первого дешифратора 5, хронизатора 9, первого шифратора 7, элемента ИЛИ 6 и передатчика 2. В состав оборудования входят также соединенный с выходом приемника 1 третий дешифратор 3, подключенный к его выходу второй шифратор 8, выход которого подключен к второму входу элемента ИЛИ 6, второй дешифратор 4, временной селектор 10, блок задержки 11 и измеритель 12, причем вход второго дешифратора соединен с выходом приемника, выход второго дешифратора - с первым входом временного селектора 10, второй вход временного селектора подключен к выходу блока задержки 11, выход временного селектора - к входу измерителя 12, а вход блока задержки - к выходу первого дешифратора.
Особенность ведущей опорной станции - отсутствие связи между выходом первого дешифратора 5 и входом хронизатора 9.
Оборудование подвижных объектов (см. фиг.2) включает последовательно соединенные приемник 13, первый дешифратор 16, первый блок задержки 17, шифратор 21, передатчик 14, а также соединенные последовательно и подключенные к выходу приемника 13 второй дешифратор 15, временной селектор 18 и измеритель 20. Между выходом первого дешифратора 16 и вторым входом временного селектора 18 включен второй блок задержки 19.
Система работает следующим образом.
Передатчик 2 ведущей опорной станции излучает импульсные сигналы с периодом, задаваемым хронизатором 9, и кодированные присвоенным этой станции кодом (будем называть этот код синхронизирующим) шифратором 7 через элемент ИЛИ 6. Сигнал ведущей опорной станции принимается приемниками 1 ведомых опорных станций, декодируется дешифраторами 5 и через хронизаторы 9, шифраторы 7 и элементы ИЛИ 6 запускает передатчики 2 ведомых опорных станций. Излучаемый сигнал кодирован присвоенным данной ведомой станции синхронизирующим кодом. Приемник 13 подвижного объекта принимает сигналы опорных станций. Принятые сигналы декодируются дешифратором 16 и поступают на блок задержки 17, где они задерживаются относительно сигнала ведущей опорной станции на время, присвоенное данному подвижному объекту и являющееся его отличительной особенностью.
На выходе блока 17 формируется сигнал, задержанный относительно сигнала ведущей опорной станции на фиксированное время, присвоенное данному подвижному объекту и являющееся его отличительной особенностью. Этот сигнал кодируется шифратором 21 (общим для всех подвижных объектов кодом) и излучается передатчиком 14.
Принятые приемниками 1 опорных станций сигналы подвижных объектов декодируются дешифраторами 3 с помощью шифраторов 8 кодируются присвоенным только данной опорной станции информационным кодом (отличным от присвоенного этой станции синхронизирующего кода) и через элемент ИЛИ 6 запускают передатчики 2, переизлучающие сигналы подвижных объектов.
Информационные (переизлученные) сигналы опорных станций принимаются приемниками 1 опорных станций и приемниками 13 подвижных объектов, декодируются соответственно дешифраторами 4, установленными на опорных станциях, и дешифраторами 15 на подвижных объектах. Полученные в результате декодирования импульсные сигналы, несущие информацию о моментах прихода сигналов от каждой опорной станции, через временной селектор 10 для опорной станции или временной селектор 18 для подвижного объекта, позволяющий выбрать из своей совокупности сигналы, принадлежащие тому подвижному объекту, местоположение которого требуется определить, поступают на вход измерителя 12 для опорной станции или измерителя 20 для подвижного объекта, который и определяет местоположение разностно-дальномерным методом так же, как это делает измеритель в известной системе. Блок задержки 11 (или блок 19 для аппаратуры подвижного объекта), запускаемый синхросигналами с выхода дешифратора 5 (16), позволяет временному селектору выбрать требуемый интервал времени, т.е. выделить необходимый подвижный объект.
Приемоизмерительная часть оборудования на опорных станциях и на подвижных объектах по составу, связям, назначению и функционированию абсолютно аналогичны. Эта часть аппаратуры может быть выполнена отдельно в виде специального контрольно-измерительного пункта, который может быть установлен в любой географической точке в зоне действия системы.
Разнесение во времени сигналов, несущих информацию о местоположении каждого подвижного объекта, обеспечивает возможность не только наблюдения, но и идентификации каждого из этих объектов.
Математически связь между периодом повторения Т сигналов, излучаемых ведущей опорной станцией, максимальной дальностью действия системы Д, количеством работающих в ней подвижных объектов описывается выражением
T = tc + Nt, (1) где tc≥  + τc - время, необходимое для излучения всеми опорными станциями синхронизирующих сигналов;
+ τc - время, необходимое для излучения всеми опорными станциями синхронизирующих сигналов;
с - скорость распространения радиосигналов;
Дм -расстояние между ведущей и самой удаленной от нее опорной станциями;
τc - длительность синхронизирующего сигнала отдельной опорной станции;
t=  + T1+τи - время, затрачиваемое на формирование и обработку сигналов одного подвижного объекта;
+ T1+τи - время, затрачиваемое на формирование и обработку сигналов одного подвижного объекта;
Т1 - защитный временной интервал, учитывающий нестабильность схем формирования временных задержек и временных селекторов;
τи - длительность информационного сигнала опорной станции.
Полезная информация о местоположении содержится во временных интервалах между принятыми в точке наблюдения информационными сигналами опорных станций (ретранслированными сигналами подвижных объектов).
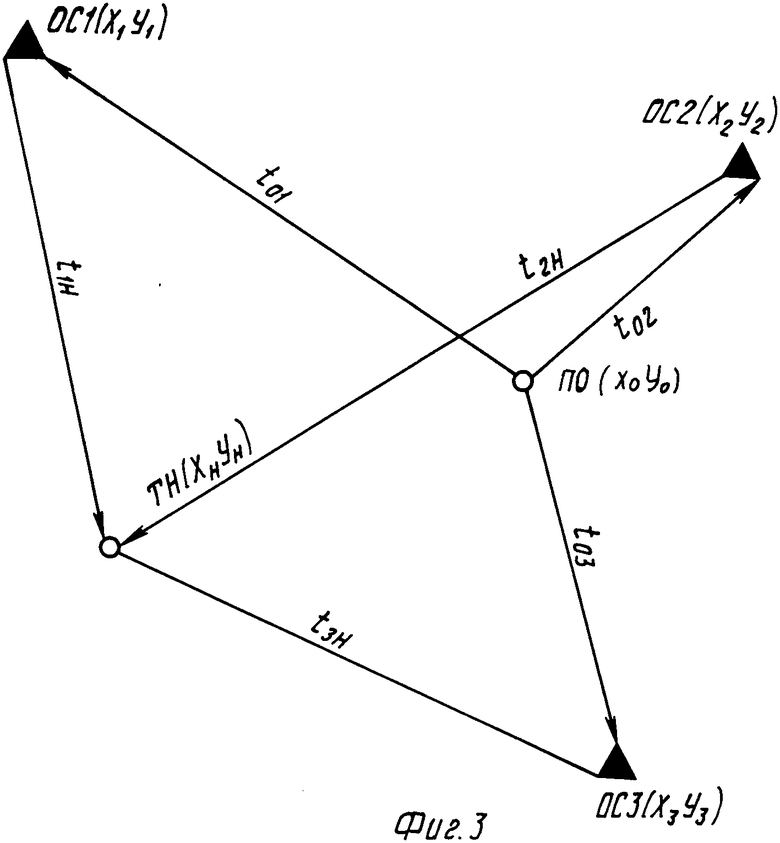
На фиг.3, где ОС1, ОС2, ОС3 - точки установки опорных станций с координатами соответственно Х1, У1; Х2, У2; Х3, У3, ПО - местоположение подвижного объекта (координаты ХО, УО) и ТН - место нахождения пункта наблюдения (это может быть опорная станция, подвижный объект или любая точка в зоне действия системы, в которой установлено соответствующее оборудование) с координатами Хн, Ун, ясно, что если в момент времени tоподвижным объектом получен радиосигнал, то в точке ТН ретранслированный опорной станцией ОС1 сигнал появится в момент времени
t1 = t0+ t01 + t1н, где t01=  - время распространения радио- сигнала от подвижного объекта до опорной станции ОС1;
- время распространения радио- сигнала от подвижного объекта до опорной станции ОС1;
t1н=  - время распространения сиг- нала от опорной станции ОС1 до пункта наблюдения ТН.
- время распространения сиг- нала от опорной станции ОС1 до пункта наблюдения ТН.
Соответственно ретранслированный сигнал от опорной станции ОС2 появится в точке наблюдения ТН в момент
t2 = to + to2 + t2н и
t3 = to = to + to3 + t3н
Очевидно, что в точке ТН могут быть зафиксированы интервалы
t12 = t1 - t2 = t01 + t1н - t02 - t2н (2)
t13 = t1 - t3 = t01 + t1н - t03 - t3н (3)
Заметим, что в выражениях (2), (3) значение to отсутствует. Таким образом для определения координат подвижного объекта не надо знать to - точного момента излучения сигнала подвижным объектом.
Координаты подвижного объекта ХО, УО можно вычислить, решив систему двух уравнений с двумя неизвестными t
t +
+ -
- -
-
(4) t
t +
+ -
- -
-
(5)
Графически решение сводится к отысканию точки пересечения двух представляющиx собой гиперболы линий положения.
Ввиду того, что информационные сигналы опорных станций кодированы, никаких проблем с различением сигналов от них при предлагаемом способе не возникает.
Координаты подвижного объекта на самом этом объекте можно определить из тех же разностей (2,3) и из тех же математических выражений (4, 5) (в этом случае ХО = Хн и УО = Ун, т.е. координаты подвижного объекта совпадают с координатами точки наблюдения). Кроме того, на каждом подвижном объекте известно время излучения сформированного на нем сигнала to, т.е. ретранслированные опорными станциями сигналы этого объекта являются просто ответными дальномерными сигналами и координаты данного подвижного объекта на нем самом могут быть определены дальномерным способом по трем дальностям.
Координаты данного подвижного объекта могут быть определены на нем самом классическим разностно-дальномерным методом путем измерения разностей времени прихода синхронизирующих сигналов трех опорных станций.
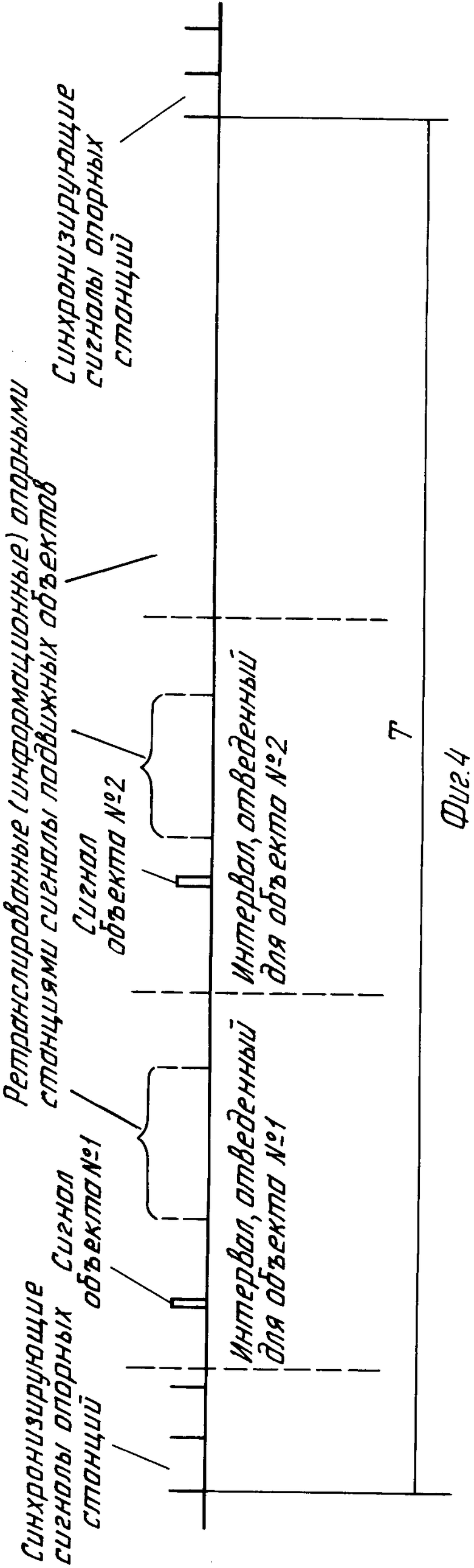
На фиг.4 показана временная структура сигналов.
Сигналы носят периодический характер. Период их следования определен хронизатором ведущей опорной станции. Часть временного интервала в каждом периоде отведена для передачи синхронизирующих сигналов опорными станциями, а остальной временной интервал поделен на отрезки, присвоенные каждому из подвижных объектов. В пределах этих временных отрезков происходит излучение сигнала подвижным объектом и его ретрансляция каждой из опорных станций. В случае если данный объект в данный момент времени в системе не работает, присвоенный ему временной интервал остается свободным.
Кроме специального применения, систему по предлагаемому способу можно использовать для обеспечения авиационной обработки сельскохозяйственных угодий, забора проб воздуха и радиационного контроля.
При оборудовании подвижными станциями автомобилей спецслужб, милиции, общественного транспорта (система может включать до 15-20 тыс. подвижных станций) такая систем может стать основой управления специальным транспортом и уличным движением в крупных населенных пунктах, причем существенно более эффективной и дешевой, чем проектируемые в настоящее время и до сих пор практически не реализованные из-за своей сложности системы управления уличным движением, так как при оборудовании даже небольшой части городского транспорта (например, общественного) на ЭВМ диспетчерского пункта управления светофорными объектами будет обеспечена очень оперативная и полная картина распределения транспортных средств (при этом легко может быть обеспечен приоритет специальному транспорту путем присвоения ему определенных номеров).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ | 1990 |
|
RU1753837C |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| РАДИОНАВИГАЦИОННАЯ МНОГОПОЗИЦИОННАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ СИСТЕМА | 2020 |
|
RU2746218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2017 |
|
RU2663193C1 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2022 |
|
RU2792013C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ АКТИВНЫХ НЕОБСЛУЖИВАЕМЫХ СТАНЦИЙ | 1999 |
|
RU2172963C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
Использование: радиотехнические методы определения координат. Сущность изобретения: способ определения местоположения подвижного объекта включает поочередное излучение подвижными объектами сигнала, переизлучаемого затем опорными станциями. При этом образуется совокупность сигналов, позволяющая определить местоположение любого подвижного объекта в любой географической точке в пределах зоны действия системы. 4 ил.
| А.А.Сосновский и И.А.Хаймович | |||
| Авиационная радионавигация | |||
| М.: Транспорт, 1980, с.40. |
