Изобретение относится к области радионавигации и может быть использовано для определения местоположения воздушных, наземных, надводных подвижных объектов.
Известен дальномерный способ радионавигационных определений, основанный на измерении дальностей между подвижным объектом и четырьмя радионавигационными пунктами, расположенными на навигационных спутниках с известным положением, и определении местоположения подвижного объекта как координат точки пересечения трех соответствующих сфер. Для измерения дальности из радионавигационных пунктов синхронно излучают радиосигналы с известным дальномерным кодом, которые принимают навигационным приемником и измеряют время распространения сигналов до подвижного объекта. Чтобы измерить это время необходимо точно знать момент излучения, для чего шкалы времени радионавигационных пунктов и подвижного объекта синхронизуют, применяя высокоточные эталоны времени с периодической их калибровкой. [1. ГЛОНАС.Принципы построения и функционирования/ Под. Ред. А.И. Петрова, В.Н. Харисова. - М.: Радиотехника, 2005, с. 67-69]
Недостатки способа заключаются в неоднозначности определения местоположения подвижного объекта и в трудности технической реализации процессов синхронизации, дороговизне высокостабильных эталонов времени, которые не могут быть использованы у массового потребителя.
Известен угломерно-дальномерный способ авиационной ближней радионавигации, включающий измерение на борту летательного аппарата высоты полета, наклонной дальности и азимута наземного радионавигационного пункта с известным местоположением.
Измерение наклонной дальности выполняют с помощью бортового за-просчика и ответчика (ретранслятора), расположенного в радионавигационном пункте, включает излучение бортовым передатчиком радиоимпульса, прием и ретрансляцию его с наземного радионавигационного пункта, прием ретранслированного радиоимпульса бортовым приемником дальномера, измерение запаздывания ретранслированного радиоимпульса относительно излученного с последующим определением дальности.
Измерение азимута включает последовательность следующих операций: излучение радиомаяком азимутального радиосигнала с помощью направленной антенны с вращением диаграммы направленности с одновременной передачей с помощью ненаправленной антенны опорного радиосигнала, несущего информацию о мгновенном положении диаграммы направленности направленной антенны, прием, разделение и детектирование бортовым навигационным приемником этих радиосигналов, измерение разности фаз между продетектирован-ными сигналами и определение по ней азимута. [2. Владимиров В.Л., Ковалев В.В., Хмуров Н.Н. Средства и системы радионавигационного обеспечения летательных аппаратов. - М.: Военное издательство, 1990, с. 320-343, 419].
Недостатки способа состоят в ограниченной пропускной способности дальномерного запросно-ответного канала, необходимости применения передатчиков с большой более 30 кВт импульсной мощностью, низком быстродействии азимутального канала, обусловленным инерционностью процесса вращения диаграммы направленности антенны.
Известен разностно-дальномерный способ радионавигации, основанный на измерении разностей дальностей от подвижного объекта до двух пар наземных станций, расположенных в пунктах с известными координатами, и определении местоположения подвижного объекта как координат точки пересечения двух гипербол. При этом наземными станциями синхронно излучают радиоимпульсы, а в пункте приема подвижного объекта их принимают и измеряют временной интервал между моментами поступления с определением разности дальностей. [2, с. 73-75, 30-31].
Недостаток данного способа, наряду с необходимостью применения передатчиков с большой импульсной мощностью, состоит в ограниченности рабочей зоны удалениями подвижного объекта от центра системы порядка величины базы, расстояния между парами наземных станций. На больших дальностях гиперболы совпадают с их асимптотами, проходящими через центр баз, почти параллельны, что приводит к большим ошибкам определения местоположения подвижного объекта.
Наиболее близким по технической сущности и достигаемому эффекту (прототип) является псевдодальномерный способ радионавигации, который включает формирование радионавигационного поля путем синхронного излучения широкополосных периодических радиосигналов с заданным дальномер-ным кодом из, по меньшей мере, трех пространственно разнесенных радионавигационных пунктов с известным положением, прием радиосигналов с помощью бортового навигационного приемника подвижного объекта, по заданному дальномерному коду разделение принятых сигналов, измерение времени их прихода и, с учетом неопределенности момента измерения, определение соответствующих псевдодальностей до радионавигационных пунктов, измерение высоты с помощью бортового измерителя, по измеренным псевдодальностям и высоте определение местоположения подвижного объекта путем решения системы уравнений взаимосвязи местоположения с результатами измерений. [1, с. 69-70, 74, 12-17].
В системах спутниковой радионавигации навигационные пункты располагают на космических аппаратах, однако нет принципиальных ограничений их размещения и на земной поверхности.
При одинаковых условиях точность определения местоположения подвижного объекта разностно-дальномерным способом-аналогом и псевдодаль-номерным способом-прототипом совпадает.
Недостатком способа-прототипа является низкая точность определения местоположения подвижного объекта, прежде всего в дальней зоне, за пределами периметра системы радионавигационных пунктов.
Техническим результатом изобретения является повышение точности определения местоположения подвижного объекта.
1). Указанный технический результат достигается тем, что в известном способе многопозиционной ближней радионавигации, включающем формирование радионавигационного поля путем синхронного излучения широкополосных периодических радиосигналов с заданным дальномерным кодом из пространственно разнесенных на земной поверхности радионавигационных пунктов с известными координатами, прием радиосигналов с помощью бортового навигационного приемника подвижного объекта, по заданному дальномерному коду разделение принятых сигналов, измерение моментов их прихода и соответствующих псевдодальностей до радионавигационных пунктов, измерение высоты с помощью бортового измерителя, определение по измеренным псевдодальностям и высоте местоположения подвижного объекта, согласно изобретению, излучение и прием радиосигналов осуществляют с помощью всенаправленных в горизонтальной плоскости антенн при постоянной мощности излучения, дополнительно измеряют амплитуду принятых радиосигналов, а местоположение подвижного объекта определяют с учетом измеренных амплитуд и их зависимости от расстояния до места излучения.
2). Технический результат достигается также за счет того, что по известной мощности излучения рассчитывают амплитуду принимаемых радиосигналов в местах возможного нахождения подвижного объекта, а его местоположение определяют методом максимального правдоподобия как положение минимума функции неопределенности в виде суммы квадратов разностей измеренных и расчетных псевдодальностей до радионавигационных пунктов и суммы квадратов отношений измеренных и расчетных амплитуд за вычетом единицы, нормированных на дисперсию измерений по формуле

где n=0,…,N - 1 - номер радионавигационного пункта при общем количестве N, х, у - координаты возможного местоположения подвижного объекта,  - измеренная псевдодальность,
- измеренная псевдодальность,  - расчетная псевдодальность,
- расчетная псевдодальность,  - расчетная дальность,
- расчетная дальность,  - неопределенность отсчета дальности, h - высота подъема антенны подвижного объекта над земной поверхностью, Xn, Yn, Hn - координаты местоположения и высота подъема антенн радионавигационных пунктов,
- неопределенность отсчета дальности, h - высота подъема антенны подвижного объекта над земной поверхностью, Xn, Yn, Hn - координаты местоположения и высота подъема антенн радионавигационных пунктов,  - измеренная и расчетная амплитуда радиосигнала,
- измеренная и расчетная амплитуда радиосигнала,  - дисперсия измерений псевдодальности,
- дисперсия измерений псевдодальности,  - дисперсия натурального логарифма измерений амплитуды.
- дисперсия натурального логарифма измерений амплитуды.
3). Технический результат достигается также за счет того, что амплитуду радиосигнала от радионавигационных пунктов рассчитывают с учетом ослабления его при распространении в свободном пространстве обратно пропорционально дальности по формуле

где Р - мощность излучения, D - коэффициент направленного действия передающих антенн радионавигационных пунктов,  - действующая высота приемной антенны подвижного объекта, K - коэффициент передачи приемноизмерительного тракта,
- действующая высота приемной антенны подвижного объекта, K - коэффициент передачи приемноизмерительного тракта,  - расчетный угол места подвижного объекта из n-го радионавигационного пункта, g(⋅), G(⋅) - диаграммы направленности приемной и передающих антенн в вертикальной плоскости.
- расчетный угол места подвижного объекта из n-го радионавигационного пункта, g(⋅), G(⋅) - диаграммы направленности приемной и передающих антенн в вертикальной плоскости.
4). Технический результат достигается также за счет того, что один из радионавигационных пунктов назначают центральным, по измеренной амплитуде принятого от центрального радионавигационного пункта радиосигнала выполняют первичную оценку дальности от подвижного объекта до этого радионавигационного пункта, определяют разности измеренных псевдодальностей от других радионавигационных пунктов относительно центрального радионавигационного пункта, а местоположение подвижного объекта первоначально оценивают по полученным разностям псевдодальностей разностно-дальномерным методом с учетом первичной оценки дальности по формуле
где 
 - разность измеренных псевдодальностей, m=0,…,N - 2, ΔXn=Xn - X0, ΔYn=Yn - Y0, ΔHn=Hn - H0,
- разность измеренных псевдодальностей, m=0,…,N - 2, ΔXn=Xn - X0, ΔYn=Yn - Y0, ΔHn=Hn - H0,  - первичная оценка дальности до опорного навигационного пункта, Т - знак транспонирования, -1 - операция обращения матрицы.
- первичная оценка дальности до опорного навигационного пункта, Т - знак транспонирования, -1 - операция обращения матрицы.
5). Технический результат достигается также за счет того, что оценивают углы места подвижного объекта, соответствующие им значения диаграмм направленности антенн, дальности до радионавигационных пунктов от подвижного объекта, находящегося в месте первоначальной оценки его местоположения, которое уточняют путем решения системы уравнений взаимосвязи местоположения подвижного объекта с результатами измерений по формуле
 дальности до радионавигационных пунктов,
дальности до радионавигационных пунктов,  - оценка угла места, k=30 - весовой коэффициент.
- оценка угла места, k=30 - весовой коэффициент.
Сущность изобретения состоит в том, что излучение и прием радиосигналов осуществляют с помощью всенаправленных в горизонтальной плоскости антенн при постоянной мощности излучения, дополнительно измеряют амплитуду принятых радиосигналов, а местоположение подвижного объекта определяют дополнительно с учетом измеренных амплитуд и их зависимости от расстояния до места излучения.
Учет измеренных амплитуд при определении местоположения подвижного объекта многовариантен. Наиболее точным, при модельном соответствии, является метод максимального правдоподобия. В соответствии с ним по известной мощности излучения рассчитывают амплитуду принимаемых радиосигналов в местах возможного нахождения подвижного объекта, а его местоположение определяют, как положение минимума функции неопределенности в виде суммы квадратов разностей измеренных и расчетных псевдодальностей до радионавигационных пунктов и суммы квадратов отношений измеренных и расчетных амплитуд за вычетом единицы, нормированных на дисперсию измерений.
Амплитуды принимаемых радиосигналов при постоянстве излучаемой мощности и всенаправленности антенн зависят от дальности непосредственно и обратно пропорционально ей, без неопределенности присущей псевдодальностям, в результате совместного учета этих разнородных навигационных параметров происходит сужение функции неопределенности по дальности с повышением точности определения местоположения подвижного объекта.
Операциями по первичной оценке местоположения и ее уточнению достигается сокращение потребного для реализации способа вычислительного ресурса.
Сущность и особенности настоящего изобретения поясняются вариантом его осуществления со ссылками на прилагаемые фигуры.
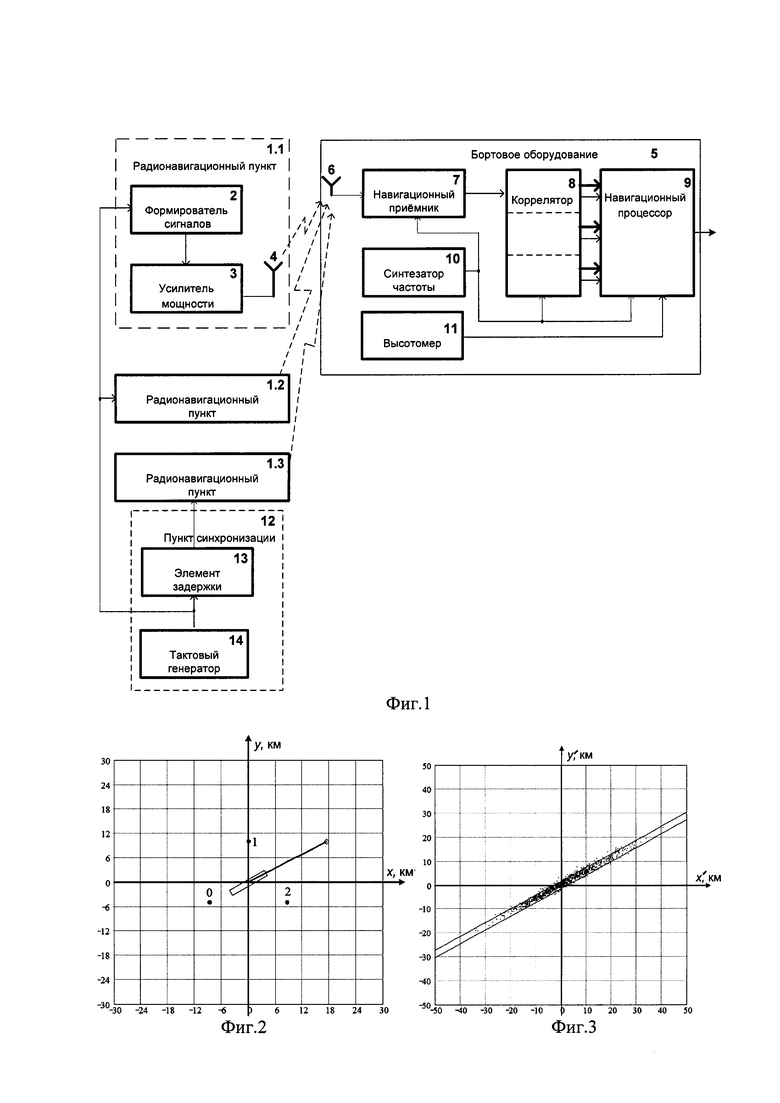
На фиг. 1 приведена структурная схема варианта системы навигации, в которой реализуется предложенный способ. Штриховыми линиями со стрелками условно показаны пути распространения радиоволн.
На фиг. 2 показан план размещения радионавигационных пунктов системы минимального состава на земной поверхности в окрестности аэродрома по вершинам равностороннего треугольника радиусом описанной окружности 10 км. В центре системы в виде правильного многоугольника достигается максимальная точность навигационных определений. Пункты системы обозначены жирными точками с указанием номеров. Пункт с номером n=0 является центральным, находится на продолжении взлетно-посадочной полосы (ВПП) в виде вытянутого прямоугольника. Ромбиком отмечено положение летательного аппарата, движущегося по указанной прямой линии в центр ВПП. Центр системы горизонтальных координат совмещен с центром ВПП, ордината у направлена в опорном направлении, например северном, тогда абсцисса х направлена на восток.
На фиг. 3 показано поле рассеивания оценок координат в горизонтальной плоскости при удалении летательного аппарата от центра ВПП в дальнюю зону, на дальность 300 км. Здесь центр системы координат перенесен в точку истинного местоположения летательного аппарата, в цент рассеивания. Тонкими диагональными линиями показан расчетный для способа-прототипа эллипс рассеивания, в отсутствии измерений амплитуды.
Система навигации фиг. 1 включает радионавигационные пункты 1.1-1.3, каждый из которых содержит включенные последовательно формирователь сигналов 2, усилитель мощности 3 и передающую антенну 4, бортовое оборудование в составе включенных последовательно приемной антенны 6, навигационного приемника 7, коррелятора 8 и навигационного процессора 9, а также синтезатора частоты 10, выход которого подключен к вторым входам навигационного приемника 7, коррелятора 8 и навигационного процессора 9, и высотомера 11, выходом соединенного с третьим входом навигационного процессора 9, пункт синхронизации 12, содержащий элемент задержки 13 и тактовый генератор 14. Выход тактового генератора 14 связан с входом радионавигационных пунктов 1.1, 1.2, которым является формирователь сигналов, в частности 2 пункта 1.1, и через элемент задержки 13 с входом радионавигационного пункта 1.3.
Радионавигационные пункты 1.1-1.3 представляют собой упрощенный вариант бортового спутникового источника радионавигационных сигналов системы ГЛОНАС [1, с. 340-349]. В формирователе сигналов 2 генерируются широкополосные периодические радиосигналы с заданным дальномерным кодом, которые усиливаются в усилителе мощности 3 и излучаются передающей антенной 4, формируя радионавигационное поле. Передающие 4 антенны радионавигационных пунктов всенаправленные в горизонтальной плоскости, например вертикальные вибраторы или турникетные. [3. Марков Г.Т., Сазонов Д.М. Антенны. М., «Энергия», 1975, с. 341-346]. Усилитель мощности 3 обеспечивает постоянную, заданную и известную мощность излучения. Принятые в системе ГЛОНАС принципы и параметры сигналов применимы и в настоящем изобретении: частотное разделение радионавигационных каналов, период излучения около 1 мс, длительность элементарного импульса Δτ=2 мкс, база 511, двоичная фазовая модуляция (ФМ-2). Наряду с вариантом частотного разделения радионавигационных каналов возможно кодовое разделение, принятое в системе GPS.
Синхронность формирования и излучения радиосигналов обеспечивается по сигналам пункта синхронизации 12, который территориально совмещен с одним из радионавигационных пунктов, центральным, например 1.3. В этот пункт синхросигналы тактового генератора 14 поступают с задержкой в элементе задержки 13 на время распространения до периферийных радионавигационных пунктов 1.1, 1.2. Передача синхросигналов от тактового генератора 14 пункта синхронизации 12 в радионавигационные пункты 1.1-1.3 может осуществляться по радиоканалу или, например по волоконно-оптическим линиям связи.
Бортовое оборудование 5 также представляет собой упрощенный вариант аппаратуры потребителя спутниковой системы ГЛОНАС, включает штатный высотомер 11, радио- или, например барометрического типа. С помощью антенны 6 и приемника 7 осуществляется прием радионавигационных сигналов. Приемная антенна 6 однотипная с передающей антенной 4, всенаправленная в горизонтальной плоскости.
Синтезатор частоты 10 формирует набор гармонических колебаний, необходимых для работы приемника 7 и тактовые сигналы синхронизирующие работу коррелятора 8 и навигационного процессора 9.
В корреляторе 8 выполняется частотное разделение принятых радиосигналов, условно это отмечено разделением горизонтальными штриховыми линиями блока 8 на три части-канала, в соответствии с количеством радионавигационных пунктов. В каждом из этих трех каналов определяют комплексную взаимную корреляционную функцию принятого радиосигнала и моделирующей функции кодовой последовательности, дальномерного кода. Определяют положение момента времени прихода радиосигнала (задержку) с преобразованием задержки умножением на скорость света в измеренное значение псевдодальности до радионавигационного пункта и дополнительно значение максимума корреляционной функции. Значение максимума корреляционной функции представляет собой измеренную амплитуду сигнала от радионавигационного пункта.
На выход коррелятора по каждому из трех каналов поступает измеренная псевдодальность, тонкая линия, и амплитуда принятого радиосигнала, толстая линия. Различием толщины линий подчеркивается особенность настоящего изобретения.
По результатам измерений псевдодальности, амплитуды, а также высоты полета высотомером 11 в навигационном процессоре 9 определяют местоположение подвижного объекта с выдачей результатов для управления движением.
Последующие операции обработки результатов измерений в навигационном процессоре 9 основываются на следующих закономерностях и состоят в следующем.
Погрешности измерения высоты современными высотомерами относительно не велики, далее полагаем эти измерения безошибочными.
Измерения псевдодальности (изначально задержки) и амплитуды принятых радиосигналов не зависимые, не смещенные, со средним значением равным истинным расчетным значениям этих параметров, которые равны


где n - номер радионавигационного пункта при общем количестве N, х,у - координаты возможного местоположения подвижного объекта, dn(x,y) - расчетная дальность до навигационного пункта, - неопределенность отсчета дальности, Р - мощность излучения, D - коэффициент направленного действия передающих антенн радионавигационных пунктов,
- неопределенность отсчета дальности, Р - мощность излучения, D - коэффициент направленного действия передающих антенн радионавигационных пунктов,  - действующая высота приемной антенны подвижного объекта, K - коэффициент передачи приемно-измерительного тракта, g(⋅),G(⋅) - диаграммы направленности приемной и передающих антенн в вертикальной плоскости, βn (х, у) - расчетный угол места подвижного объекта.
- действующая высота приемной антенны подвижного объекта, K - коэффициент передачи приемно-измерительного тракта, g(⋅),G(⋅) - диаграммы направленности приемной и передающих антенн в вертикальной плоскости, βn (х, у) - расчетный угол места подвижного объекта.
Коэффициент передачи приемно-измерительного тракта K определяется от входа навигационного приемника 7 до выхода коррелятора 8 в точке максимума корреляционной функции.
Согласно формуле (2) амплитуду радиосигнала от радионавигационных пунктов рассчитывают с учетом ослабления его при распространении в свободном пространстве обратно пропорционально дальности, которая равна

Угол места определяют по формуле

где Xn, Yn, Hn - координаты местоположения и высота подъема антенн радионавигационных пунктов, h - высота подъема приемной антенны подвижного объекта над земной поверхностью.
Точность измерений псевдодальности и амплитуды сигналов ограничивается инструментальными и эксплуатационными факторами, помехами мультипликативного типа, когда отношение амплитуды сигнала к среднему квадрати-ческому значению шума (помехи) неизменно, не зависит от уровня принимаемого сигнала. Согласно этому, закон распределения измерений псевдодальности нормальный с дисперсией  и такой же по отношению к логарифму измеренных амплитуд с дисперсий логарифма
и такой же по отношению к логарифму измеренных амплитуд с дисперсий логарифма 
В соответствии с таким статистическим описанием неизвестные координаты местоположения объекта и неопределенность отсчета дальности определяют методом максимального правдоподобия по формуле


Заключительное равенство в (5) справедливо в окрестности местоположения объекта, когда измеренные и расчетные значения амплитуды примерно равны и достигается минимум функции неопределенности.
Оценка неопределенности отсчета дальности  может быть использована для корректировки фазы тактовых сигналов синтезатора частоты 10 для последующего сужения зоны поиска максимума корреляционной функции в корреляторе 8.
может быть использована для корректировки фазы тактовых сигналов синтезатора частоты 10 для последующего сужения зоны поиска максимума корреляционной функции в корреляторе 8.
Согласно формуле (5) местоположение подвижного объекта определяют, как положение минимума функции неопределенности в области возможного положения объекта в виде суммы квадратов разностей измеренных и расчетных псевдодальностей до радионавигационных пунктов и суммы квадратов отношений измеренных и расчетных амплитуд за вычетом единицы, нормированных на дисперсию измерений.
Поиск минимума в формуле (5) возможен на основе квантования области возможного положения объекта с заданным шагом и расчета значений функции неопределенности в точках квантования, при этом требуются значительные вычислительные ресурсы.
Для сокращения вычислительных операций используем алгебраическое решение работы [4. Щербачев В.А. Замкнутые решения при определении координат в распределенной разностно-дальномерной системе. «Радиотехника», 2013, №4, с. 4-8] в следующем варианте первичного оценивания местоположения объекта.
Определим один из радионавигационных пунктов как центральный. По измеренной амплитуде принятого от этого пункта радиосигнала выполним первичную оценку дальности, определим разности измеренных псевдодальностей от других радионавигационных пунктов относительно центрального радионавигационного пункта. С учетом полученного первичную оценку местоположения выполним разностно-дальномерным методом по формуле

где 
 - разность измеренных псевдодальностей, m=0,…,N - 2, ΔXn=Xn - X0, ΔYn=Yn - Y0, ΔHn=Hn - H0,
- разность измеренных псевдодальностей, m=0,…,N - 2, ΔXn=Xn - X0, ΔYn=Yn - Y0, ΔHn=Hn - H0,  - первичная оценка дальности до центрального радионавигационного пункта, Т - знак транспонирования, -1 - операция обращения матрицы.
- первичная оценка дальности до центрального радионавигационного пункта, Т - знак транспонирования, -1 - операция обращения матрицы.
В отличие от [4] в настоящем изобретении первичную оценку дальности до центрального радионавигационного пункта выполняют не по разностям измеренных псевдодальностей, а по измеренной амплитуде 
При первичной оценке дальности (6) не учитываются результаты измерения амплитуды радиосигналов от периферийных радионавигационных пунктов и направленность антенн в вертикальной плоскости, что сопровождается потерями точности.
Для устранения этого недостатка оценивают углы места подвижного объекта, соответствующие им значения диаграмм направленности антенн, дальности до радионавигационных пунктов от подвижного объекта, находящегося в месте первоначальной оценки его местоположения. Первичную оценку координат (6) уточняют путем решения системы уравнений взаимосвязи (равенства) измеренных и расчетных псевдодальностей и амплитуд принятых радиосигналов в окрестности первичной оценки по формуле

где An,0=an⋅k, An,1=bn⋅k, An,2=1⋅k,  k=30 - весовой коэффициент, An+N,0=an, An+N,1=bn, An+N,2=0,
k=30 - весовой коэффициент, An+N,0=an, An+N,1=bn, An+N,2=0,  an, bn - производные дальности по осям координат,
an, bn - производные дальности по осям координат, 
 - оценка дальности до радионавигационных пунктов,
- оценка дальности до радионавигационных пунктов,  - оценка угла места.
- оценка угла места.
Приведенные здесь и ранее различные варианты выполнения операций способа приводят к заявленному техническому решению.
Для доказательства заявленного технического результата и количественной сравнительной со способом-прототипом оценки достигаемой точности выполнено имитационно-статистическое моделирование применительно к системе фиг. 2 радиусом 10 км и антеннами с идентичными диаграммами направленности в вертикальной плоскости в виде восьмерки g(β)=G(β)=cos β.
Когда необходимо сплошное радионавигационное покрытие, в том числе над навигационным пунктом, где cosβ=cosπ/2=0 и приема сигнала нет, рекомендуется увеличить количество радионавигационных пунктов до четырех с расположением их по вершинам квадрата. При этом повышается точность в  раз и надежность системы, так как неисправность одного из пунктов не станет критичной для всей системы.
раз и надежность системы, так как неисправность одного из пунктов не станет критичной для всей системы.
При моделировании установлена высота подъема излучателей радионавигационных пунктов 10 м, высота полета объекта 7000 м на дальности 300 км.
К истинным значениям измеряемых псевдодальностей добавлялись нормальные центрированные случайные погрешности из расчета достигнутых в системе ГЛОНАС со средним квадратическим отклонением равным σd=30 м.
Согласно оценкам потенциальной точности [5. Теоретические основы радиолокации. Под. ред. Ширмана Я.Д. М., «Советское радио», 1970, с. 190-191] при длительности элементарного импульса Δτ=2 мкс указанной погрешности σd соответствует отношение сигнал/шум (амплитуды сигнала к среднему квадратичному значению шума) равное  В свою очередь среднее квадратическое значение флуктуаций логарифма измеренных амплитуд равно
В свою очередь среднее квадратическое значение флуктуаций логарифма измеренных амплитуд равно  непер или
непер или  дБ. Соответственно при моделировании к истинному значению амплитуды принятых радиосигналов un(х,у) добавлялись случайные величины в виде экспоненты нормального шума (помехи) ξn с математическим ожиданием равным 1 и средним квадратическим отклонением σu. Измеренные значения амплитуды при этом равны
дБ. Соответственно при моделировании к истинному значению амплитуды принятых радиосигналов un(х,у) добавлялись случайные величины в виде экспоненты нормального шума (помехи) ξn с математическим ожиданием равным 1 и средним квадратическим отклонением σu. Измеренные значения амплитуды при этом равны 
Поле рассеивания оценок координат в горизонтальной плоскости для указанных условий представлено на фиг.3. Рассеивание сосредоточено в относительно не большой, в сравнении со способом прототипом (диагональные линии эллипса рассеивания), области пространства. При исходной относительной погрешности 36% от дальности способа-прототипа предлагаемым решением обеспечивается 4,3%, то есть достигается повышение точности местоопределе-ния подвижного объекта в 8,2 раз. Указанные результаты даны для варианта алгебраической оценки (6) и его уточнения (7). Конечный результат практически совпадает с оценкой методом максимального правдоподобия (5). Предварительная оценка (6) в 2,2 раза менее точная, чем уточнение (7).
Таким образом, заявленный способ многопозиционной ближней радионавигации обеспечивает повышение точности определения местоположения подвижного объекта в дальней зоне в 8,2 раз.
Изобретение относится к области радионавигации и может быть использовано для определения местоположения воздушных, наземных, надводных подвижных объектов. Технический результат - повышение точности определения местоположения подвижного объекта. Способ многопозиционной ближней радионавигации включает формирование радионавигационного поля путем синхронного излучения широкополосных периодических радиосигналов с заданным дальномерным кодом из пространственно разнесенных на земной поверхности радионавигационных пунктов с известными координатами, прием радиосигналов с помощью бортового навигационного приемника подвижного объекта, по заданному дальномерному коду разделение принятых сигналов, измерение моментов их прихода и соответствующих псевдодальностей до радионавигационных пунктов, измерение высоты с помощью бортового измерителя, определение по измеренным псевдодальностям и высоте местоположения подвижного объекта. При этом излучение и прием радиосигналов осуществляют с помощью всенаправленных в горизонтальной плоскости антенн при постоянной мощности излучения, дополнительно измеряют амплитуду принятых радиосигналов, а местоположение подвижного объекта определяют с учетом измеренных амплитуд и их зависимости от расстояния до места излучения. 4 з.п. ф-лы, 3 ил.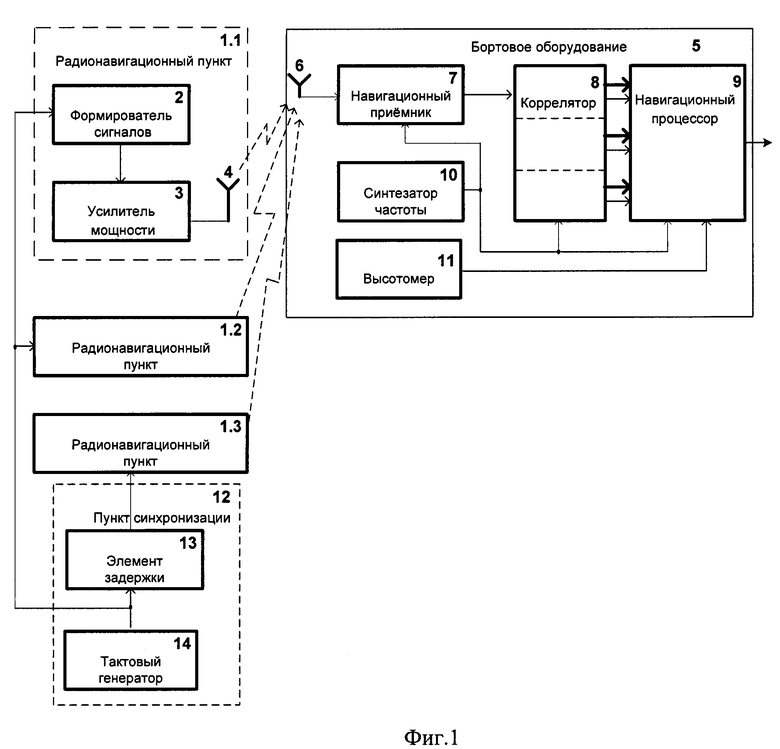
1. Способ многопозиционной ближней радионавигации, включающий формирование радионавигационного поля путем синхронного излучения широкополосных периодических радиосигналов с заданным дальномерным кодом из пространственно разнесенных на земной поверхности радионавигационных пунктов с известными координатами, прием радиосигналов с помощью бортового навигационного приемника подвижного объекта, по заданному дальномерному коду разделение принятых сигналов, измерение моментов их прихода и соответствующих псевдодальностей до радионавигационных пунктов, измерение высоты с помощью бортового измерителя, определение по измеренным псевдодальностям и высоте местоположения подвижного объекта, отличающийся тем, что излучение и прием радиосигналов осуществляют с помощью всенаправленных в горизонтальной плоскости антенн при постоянной мощности излучения, дополнительно измеряют амплитуду принятых радиосигналов, а местоположение подвижного объекта определяют с учетом измеренных амплитуд и их зависимости от расстояния до места излучения.
2. Способ многопозиционной ближней радионавигации по п. 1, отличающийся тем, что по известной мощности излучения рассчитывают амплитуду принимаемых радиосигналов в местах возможного нахождения подвижного объекта, а его местоположение определяют методом максимального правдоподобия как положение минимума функции неопределенности в виде суммы квадратов разностей измеренных и расчетных псевдодальностей до радионавигационных пунктов и суммы квадратов отношений измеренных и расчетных амплитуд за вычетом единицы, нормированных на дисперсию измерений по формуле

где n=0,…, N - 1 - номер радионавигационного пункта при общем количестве N, х, у - координаты возможного местоположения подвижного объекта,  - измеренная псевдодальность,
- измеренная псевдодальность,  - расчетная псевдодальность,
- расчетная псевдодальность,  - расчетная дальность,
- расчетная дальность,  - неопределенность отсчета дальности, h - высота подъема антенны подвижного объекта над земной поверхностью, Xn, Yn, Hn - координаты местоположения и высота подъема антенн радионавигационных пунктов,
- неопределенность отсчета дальности, h - высота подъема антенны подвижного объекта над земной поверхностью, Xn, Yn, Hn - координаты местоположения и высота подъема антенн радионавигационных пунктов,  - измеренная и расчетная амплитуда радиосигнала,
- измеренная и расчетная амплитуда радиосигнала,  - дисперсия измерений псевдодальности,
- дисперсия измерений псевдодальности,  - дисперсия натурального логарифма измерений амплитуды.
- дисперсия натурального логарифма измерений амплитуды.
3. Способ многопозиционной ближней радионавигации по пп. 1, 2, отличающийся тем, что амплитуду радиосигнала от радионавигационных пунктов рассчитывают с учетом ослабления его при распространении в свободном пространстве обратно пропорционально дальности по формуле

где Р - мощность излучения, D - коэффициент направленного действия передающих антенн радионавигационных пунктов,  - действующая высота приемной антенны подвижного объекта, K - коэффициент передачи приемно-измерительного тракта,
- действующая высота приемной антенны подвижного объекта, K - коэффициент передачи приемно-измерительного тракта,  - расчетный угол места подвижного объекта из n-го радионавигационного пункта, g(⋅),G(⋅) - диаграммы направленности приемной и передающих антенн в вертикальной плоскости.
- расчетный угол места подвижного объекта из n-го радионавигационного пункта, g(⋅),G(⋅) - диаграммы направленности приемной и передающих антенн в вертикальной плоскости.
4. Способ многопозиционной ближней радионавигации по пп. 1, 3, отличающийся тем, что один из радионавигационных пунктов назначают центральным, по измеренной амплитуде принятого от центрального радионавигационного пункта радиосигнала выполняют первичную оценку дальности от подвижного объекта до этого радионавигационного пункта, определяют разности измеренных псевдодальностей от других радионавигационных пунктов относительно центрального радионавигационного пункта, а местоположение подвижного объекта первоначально оценивают по полученным разностям псевдодальностей разностно-дальномерным методом с учетом первичной оценки дальности по формуле
где  Am,0=2ΔXm+1, Am,1=2ΔYm+1,
Am,0=2ΔXm+1, Am,1=2ΔYm+1,  - разность измеренных псевдодальностей, m=0,…,N - 2, ΔXn=Xn - X0, ΔYn=Yn - Y0, ΔHn=Hn - H0,
- разность измеренных псевдодальностей, m=0,…,N - 2, ΔXn=Xn - X0, ΔYn=Yn - Y0, ΔHn=Hn - H0,  - первичная оценка дальности до опорного навигационного пункта, Т - знак транспонирования, -1 - операция обращения матрицы.
- первичная оценка дальности до опорного навигационного пункта, Т - знак транспонирования, -1 - операция обращения матрицы.
5. Способ многопозиционной ближней радионавигации по пп. 1, 3, 4, отличающийся тем, что оценивают углы места подвижного объекта, соответствующие им значения диаграмм направленности антенн, дальности до радионавигационных пунктов от подвижного объекта, находящегося в месте первоначальной оценки его местоположения, которое уточняют путем решения системы уравнений взаимосвязи местоположения подвижного объекта с результатами измерений по формуле
где An,0=an⋅k, An,1=bn⋅k, An,2=1⋅k,  An+N,0=an, An+N,1=bn, An+N,2=0,
An+N,0=an, An+N,1=bn, An+N,2=0, 
 - оценка дальности до радионавигационных пунктов,
- оценка дальности до радионавигационных пунктов,  - оценка угла места, k=30 - весовой коэффициент.
- оценка угла места, k=30 - весовой коэффициент.
| ГЛОНАС | |||
| Принципы построения и функционирования/ Под | |||
| Ред | |||
| А.И | |||
| Петрова, В.Н | |||
| Харисова | |||
| - М.: Радиотехника, 2005, сс | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| РАДИОНАВИГАЦИОННАЯ МНОГОПОЗИЦИОННАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ СИСТЕМА | 2020 |
|
RU2746218C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1989 |
|
RU2030755C1 |
| Фотореле | 1974 |
|
SU498655A1 |
| CN 101900822 A, 01.12.2010 | |||
| CN 101221237 A, 16.07.2008. | |||

