Система относится к радионавигационным многопозиционным разностно-дальномерным системам, предназначенным для определения координат наземных объектов и воздушных носителей средств обнаружения и поиска удаленных объектов.
Технический результат - мобильная радионавигационная многопозиционная разностно-дальномерная система, могущая быть дублирующей при потере сигналов от глобальных навигационных систем на ограниченных участках земной поверхности.
В названии изобретения присутствуют назначение, радионавигационная, и его функция, многопозиционная разностно-дальномерная система. Технический результат базируется на дополнении известной системы устройством формирования навигационного поля с временным разделением каналов; устройством определения разности дальностей и своих координат потребителем навигационного поля аналитическим решением системы линейных уравнений, полученных предложенной последовательностью линеаризации системы гиперболических уравнений, и, кроме этого, в ходе линеаризации определено общее число навигационных постов.
Область техники, к которой относится изобретение
Изобретение относится к радионавигационным системам по определению местоположения или получения информации, относящейся к местоположению, для целей навигации посредством свойств распространения радиоволн и свойств поверхностей (линий) положения.
Радионавигационная система наземного базирования - совокупность взаимодействующих радиоэлектронных и технических средств, размещенных в обоснованных точках земной поверхности и на подвижных объектах обеспечивающая эти объекты навигационной информацией.
Уровень техники
Радиосистемы дальней навигации (дальномерные, квазидальномерные, разностно-дальномерные) представляют собой многопозиционные системы, основу которых составляет сеть опорных станций, размещенных в точках с известными координатами. Суть процедуры, реализуемой при дальномерном методе, в следующем. Опорные станции в один и тот же момент времени излучают навигационные сигналы, по которым потребитель, имеющий только приемную аппаратуру и устройство обработки сигналов, находит свое местоположение. При этом он использует собственный эталон времени, с помощью которого измеряют время прихода от опорной станции навигационного сигнала. Моменты времени излучения и приема синхронизированы со шкалой Всемирного координированного времени. Таким образом, дальномерный метод определения местоположения потребителя исходит из того, что на каждой опорной станции и на потребителе имеются высокостабильные эталоны времени. Квазидальномерный метод определения местоположения применяют в случае расхождения временных шкал опорных станций и потребителя информации.
Глобальные навигационные спутниковые системы (ГЛОНАСС), реализующие квазидальномерный метод, имеют ряд неоспоримых преимуществ: полное покрытие земной поверхности и околоземного пространства, унификация оборудования для всех пользователей и т.д. [1].
Однако в ходе эксплуатации и экспериментальных исследований выявлены существенные недостатки. Некоторыми из них являются: недостаточная помехоустойчивость, сбои и аварии на спутниках, которые в периоды «конфликтных ситуаций» могут привести к утрате навигационного обеспечения целенаправленными действиями.
В известных разностно-дальномерных системах навигации (определение координат местоположения потребителя информации) реализованы фазовые методы, при использовании которых может быть получен требуемый темп измерений. При этом система также содержит опорную станцию и несколько ведомых. На опорной и ведомых станциях имеются эталонные генераторы, которые синхронизируют передатчики. В аппаратуре потребителя информации принятые сигналы после усиления подаются на коммутатор, работающий синхронно с переключениями опорной и ведомых станций. В структуре потребителя имеется опорный генератор, который совместно с измерителями фаз обеспечивает измерение разности фаз сигналов от опорной станции и от ведомой станции. По разности фаз сигналов от опорной и ведомой станций находится разность дальностей между ними и потребителями информации, а также строится линия (поверхность) положения.
Аналогично по разности фаз сигналов от опорной станции и от другой ведомой станции находится разность дальностей между ними и потребителем информации и строится еще одна линия (поверхность) положения.
Для определения своих координат потребитель информации кроме линий (поверхностей) положения имеет в базе данных координаты опорной и ведомых станций [2, 3].
Однозначность измерения дальности в фазовых системах навигации обеспечивается только в пределах длины волны несущего колебания. Для разрешения многозначности измерений используют импульсно-фазовые системы; их навигационный сигнал представляет собой пачку когерентных импульсов, несущая частота которых служит для точного, а огибающая - для грубого измерения разности дальностей с целью устранения многозначности точных измерений.
По сущности технического решения наиболее близким к предлагаемой системе является «Система навигации» с патентом на полезную модель RU 44190 U1, заявка 2004130926/22, 28.04.2004 [4]. В указанной полезной модели технический результат, разработка мобильной системы локальной навигации, со следующими признаками:
исключение ошибок определения координат потребителя информации вследствие нестабильности эталонов частоты опорных станций и потребителя информации;
возможность изменения темпа формирования навигационного поля;
уменьшение ошибок геометрического фактора.
Однако в прототипе не представлены:
достаточность данных о моментах прихода сигналов от опорной и ведомых станций для решения системы уравнений по определению координат потребителя;
доказательство необходимости и достаточности четырех навигационных постов для решения системы гиперболических уравнений с однозначным определением координат с требуемой точностью;
анализ влияния пространственного положения потребителя информации для внесения в структуру «Системы навигации».
Сущность изобретения
Сущность изобретения заключается в совокупности существенных признаков, находящихся в причинно-следственной связи с совершенствованием радионавигационной разностно-дальномерной системы.
Для достижения указанного технического результата представлены следующие существенные признаки:
определение общего числа навигационных постов и формирование системы линейных уравнений по вычислению координат потребителя информации;
формирование навигационного поля системой с временным разделение каналов;
координатно-временное обеспечение определения разности дальностей потребителя информации.
При этом определение общего числа навигационных постов и формирование системы линейных уравнений по вычислению координат потребителя информации базируется на преобразовании системы гиперболических уравнений.
Основой построения радионавигационных систем на многопозиционной разностно-дальномерной основе является система гиперболических уравнений вида:
[(x0-x1)2+(y0-y1)2+(z0-z1)2]0.5-[(x0-xi)2+(y0-yi)2+(z0-zi)2]0.5=Д1-Дi,
где xi, yi, zi - координаты навигационных постов (передатчиков);
х0, у0, z0 - определяемые координаты объекта на его борту;
Д1-Дi - разность дальностей от объекта навигации до ведущего (1-го) и i-го навигационного поста.
Запись правых частей подтверждает, что в качестве ведущего навигационного поста принят первый. При формировании структуры многопозиционной разностно-дальномерной системы следует учитывать, что Д1 является отрезком между передатчиком поста и объектом навигации.
Покажем последовательность построения системы из трех линейных уравнений и возможность их формирования для различного числа постов. Каждую пару уравнений с правыми частями (А12-А13), (А14-А15) и (A16-A17) разрешают относительно Д1 и преобразуют к линейной форме относительно х0,, y0, z0, A1i=Д1-Д1i.
Тогда для первой пары, где в правой части А12, получим:


Подобные преобразования 2-го уравнения с А13 дадут:
 Равенства приводят к выражению:
Равенства приводят к выражению:
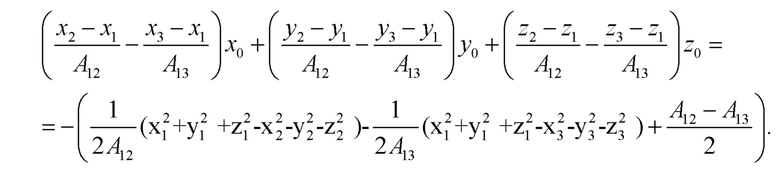
При компактной записи получают:




Тогда система линейных уравнений примет вид:
λ1x0+q1y0+ε1z0=-ξ1;
λ2x0+q2y0+ε2z0=-ξ2;
λ3х0+q3y0+ε3z0=-ξ3.
Координаты потребителя информации
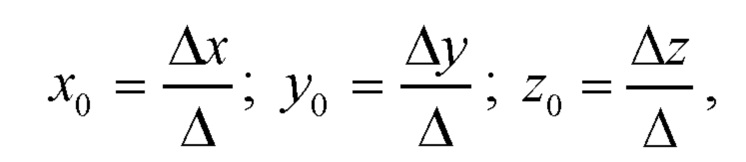
где
Δ - определитель матрицы 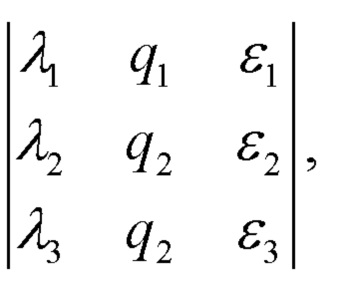
Δi (i=x, у, z) - определитель матрицы, в которой соответствующий столбец заменен столбцом из свободных членов.
Уменьшение числа постов до пяти может быть достигнуто, если использовать следующие пары разностей:
(А12, А13), (A12, А14) и (A12, A15).
Для каждой из разностей внутри пары находятся зависимости для Д1; последние приравнивают и записывают линейное уравнение для х0, у0, z0.
Упрощение записи системы уравнений достигается введением следующих переменных: 






Система уравнений примет вид:
k1x0+p1y0+s1z0=-ψ1;
k2x0+p2y0+s2z0=-ψ2;
k3x0+p3y0+s3z0=-ψ3,
и имеет решение
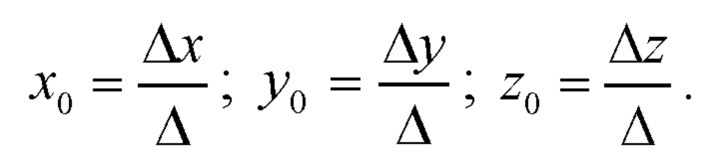
На фиг. 1 представлена компактная запись системы линейных уравнений для определения координат потребителя информации при использовании пяти и семи навигационных постов.
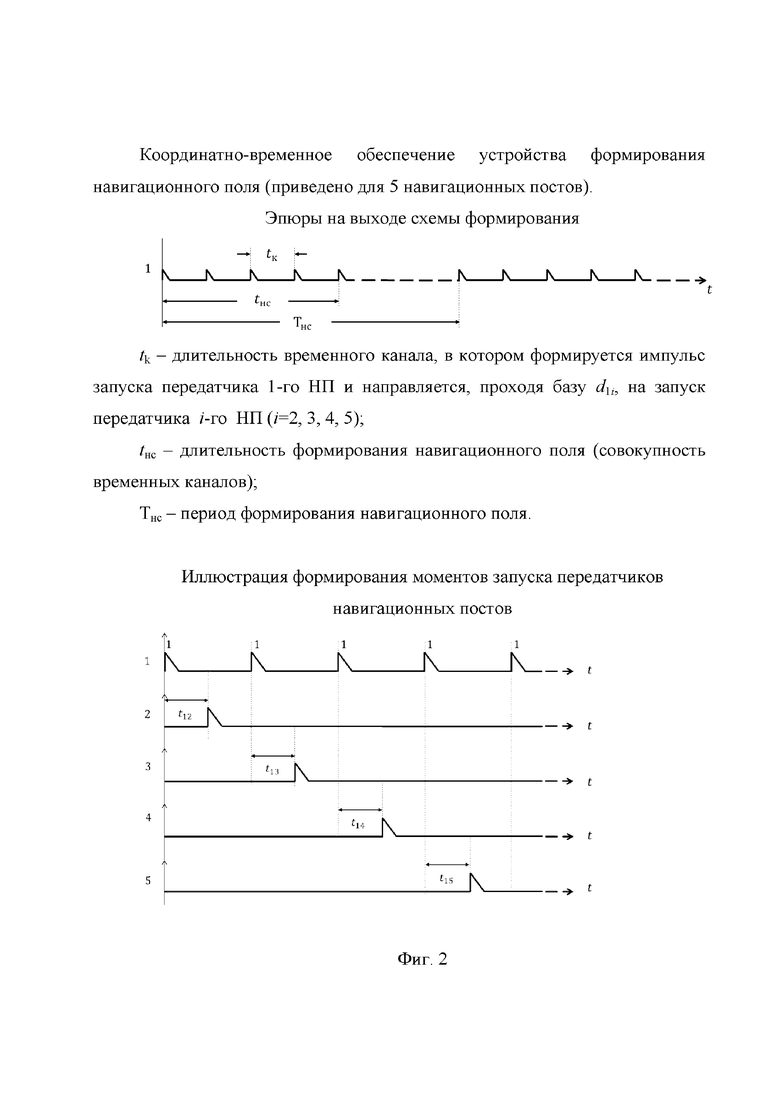
Предпочтительным является представление системы радионавигационной как системы с разделением каналов во времени. В начале каждого из каналов формируют импульс запуска передатчика первого (опорного) навигационного поста. Этим же сигналом, прошедшим базу d1i (i=2, …, 5), осуществляют запуск передатчика i-го навигационного поста.
Использование фактов излучения сигналов 1-ми i-м навигационными постами, приема и обработки их в одном и том же канале исключает необходимость установки эталонов времени и обеспечивает согласованность получения разности времени (ti-t1i) и формирования A1i=(Д1-Дi) для решения системы уравнений. Количество каналов на единицу меньше числа навигационных постов. Длительность канала принимают не менее времени распространения электромагнитной энергии на максимальную дальность навигации.
Сумма каналов является временем существования навигационного поля. Периодичность времени формирования навигационного поля характеризуют величиной Тнс. Конкретные значения числа постов, длительности канала, период Тнс вводят перед применением системы по назначению. На фиг. 2 представлены эпюры, иллюстрирующие координатно-временное обеспечение формирования навигационного поля.
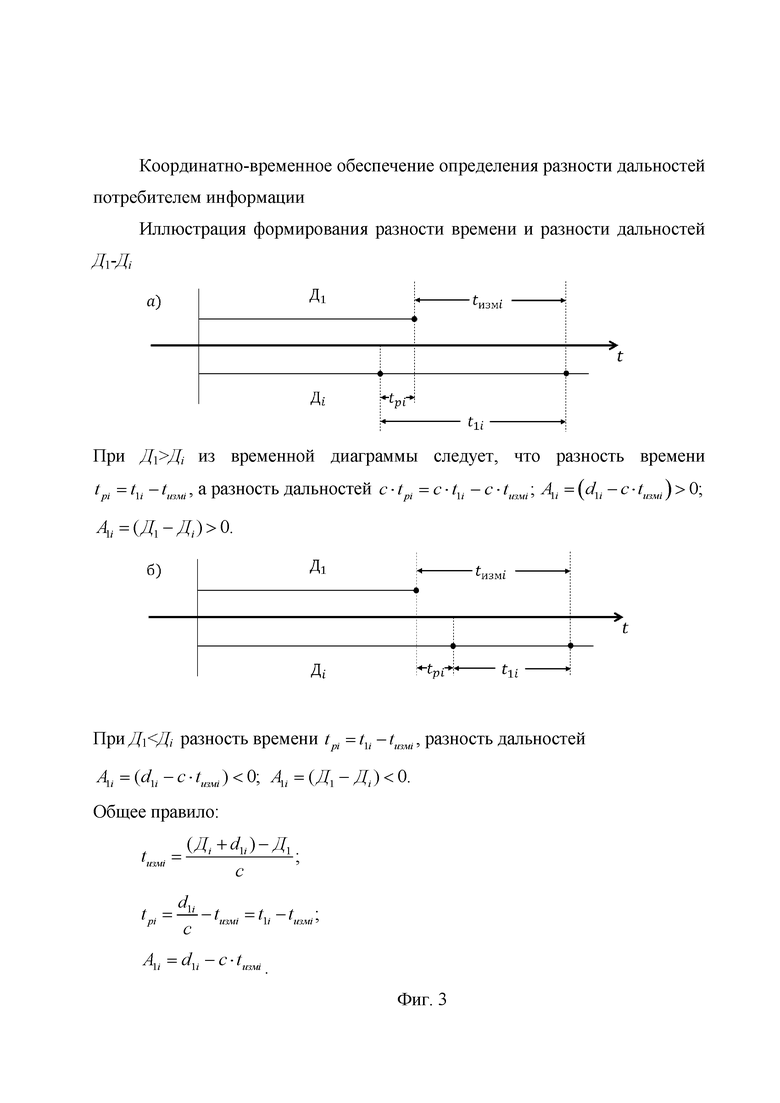
Целесообразно выполнить определение разности дальностей на следующих предпосылках: приемник потребителя информации в каждом канале первым принимает сигнал от 1-го навигационного поста по сравнению с i-м НП, поскольку сумма (Дi+Δd1i) двух сторон треугольника больше третьей Д1; сигнал от i-го НП поступает через время tизмi=[(Дi+d1i)-Д1] / с, которое определяют измерителем временного интервала. Величину t1i определят как отношение вычисленной базы d1i по координатам 1-го и i-го передатчика к скорости света. Для системы уравнений вычисляют разность A1i=(Д1-Дi), при Д1>Дi присваивают знак «+», при Д1<Дi - «-». На фиг. 3 представлена временная диаграмма, позволяющая определять A1i по единой зависимости для обоих случаев:
tpi=t1i-tизмi,
A1i=(d1i-c⋅tизмi).
Перечень чертежей и иных материалов
Фиг. 1 Система линейных уравнений по определению координат потребителей информации навигационного поля.
Фиг. 2 Координатно-временное обеспечение устройства формирования навигационного поля.
Фиг. 3 Координатно-временное обеспечение определения разности дальностей потребителем информации.
Фиг. 4 Структурные схемы аппаратуры опорного (а) и ведомых (б) постов формирования навигационного поля.
Фиг. 5 Функциональная схема потребителя информации навигационного поля.
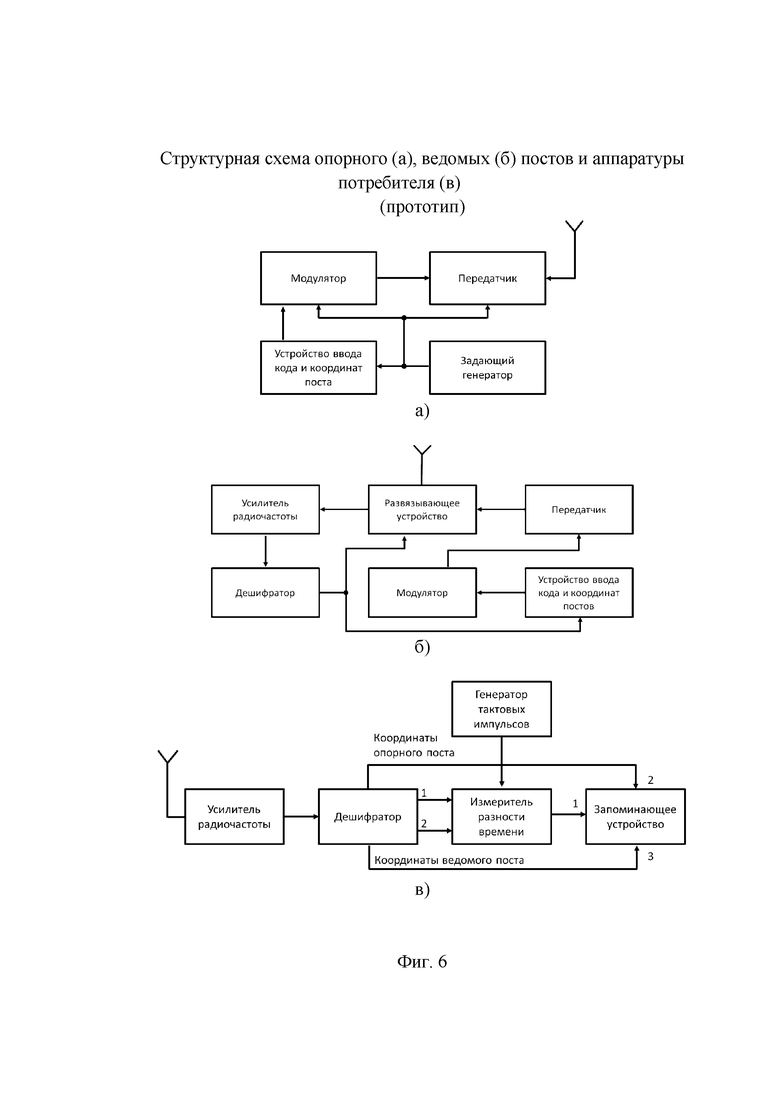
Фиг. 6 Структурная схема прототипа.
Сведения, подтверждающие возможность осуществления изобретения
Для формирования навигационного поля разворачивают необходимое количество навигационных постов (пять или семь), координаты которых определяют методом топогеодезической привязки, один из них назначают первым (опорным). Остальные навигационные посты (их передатчики) удалены от координат первого передатчика на величину базы, момент излучения электромагнитной энергии каждым передатчиком синхронизирован с импульсом запуска 1-го навигационного поста с учетом прохождения им соответствующей базы.
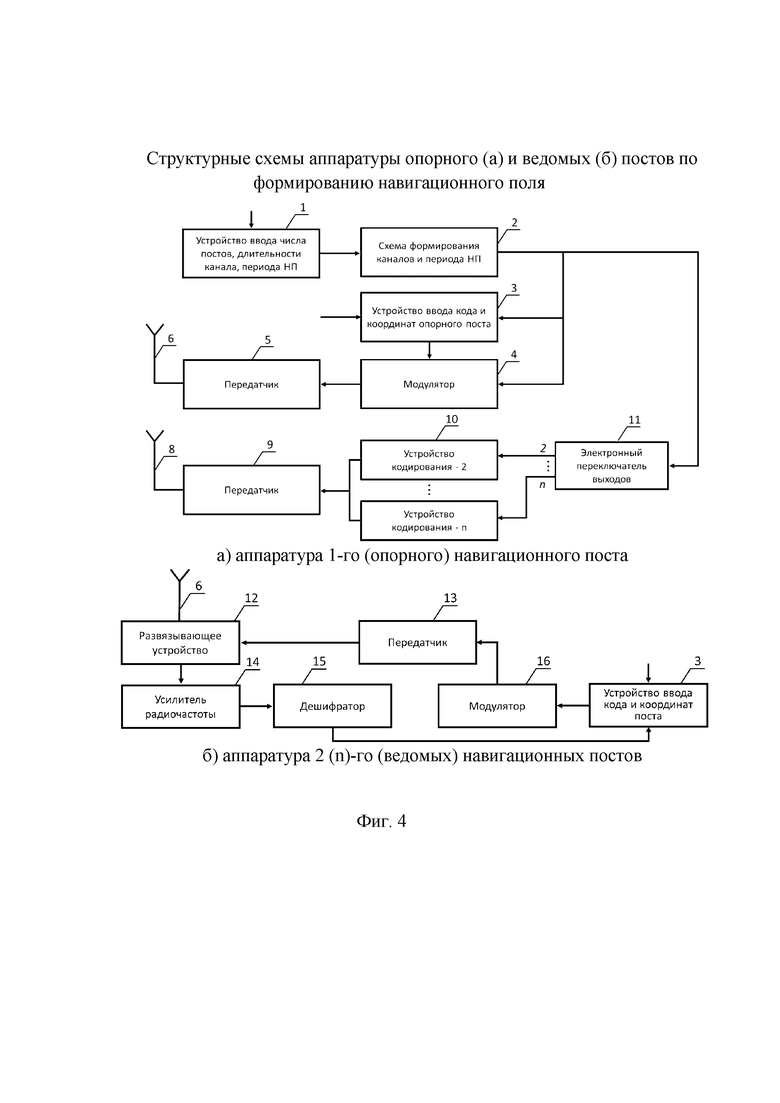
Радионавигационная МПРД система представляет совокупность аппаратуры опорного и ведомых постов по формированию навигационного поля и потребителя информации навигационного поля. Структурные схемы аппаратуры опорного и ведомых постов по формированию навигационного поля представлены на фиг. 4. Схема аппаратуры опорного поста содержит устройство ввода числа постов, длительности канала, периода навигационного поля 1, выход которого подключен ко входу схемы формирования каналов и периода навигационного поля 2, выход его соединен со входами устройства ввода кода и координат опорного поста 3, модулятора 4, электронного переключателя выходов 11, второй вход модулятора 4 соединен с выходом устройства 3; модулятор 4, передатчик 5, антенна 6 соединены последовательно; (n-1) выходов электронного переключателя подключены ко входам соответствующих устройств кодирования, выходы которых нагружены на вход передатчика 9, выход последнего подключен к антенне 8; схема аппаратуры ведомых навигационных постов содержит последовательно соединенные антенну 6, развязывающее устройство 12, усилитель радиочастоты 14, дешифратор 15, устройство ввода кода координат поста 3, модулятор 16, передатчик 13, выход которого подключен ко второму входу развязывающего устройства 12.
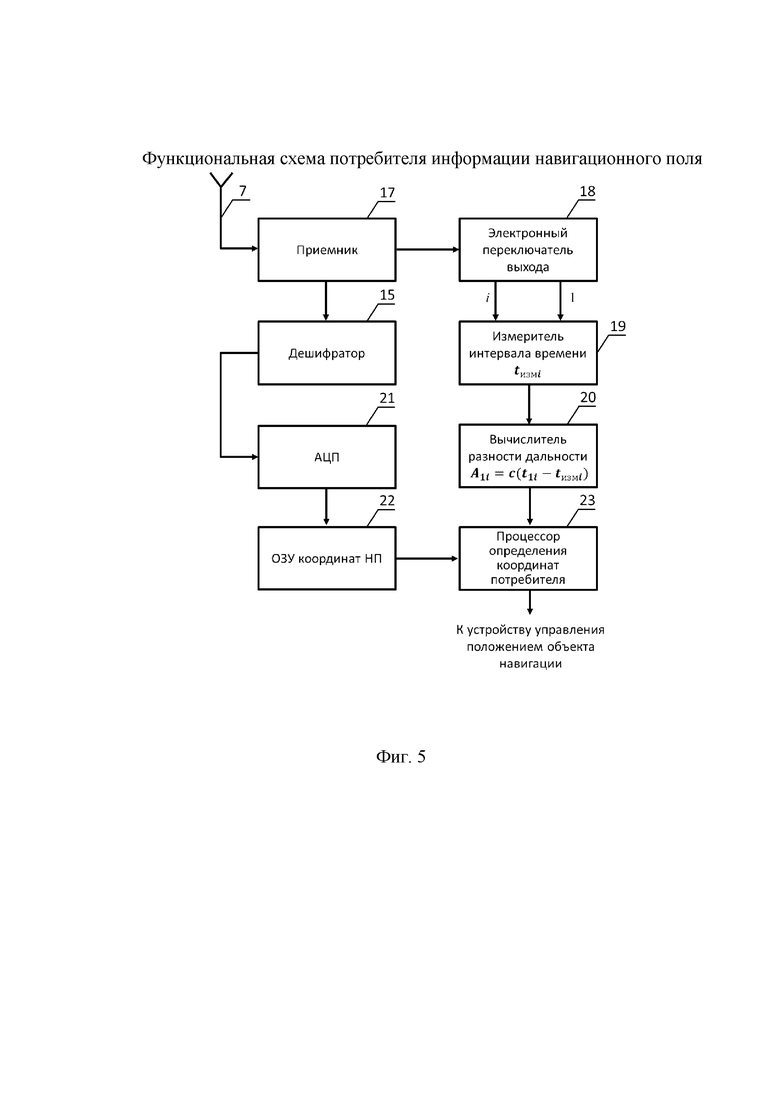
Функциональная схема потребителя информации навигационного поля представлена на фиг. 5 и включает последовательно соединенные антенну 7, приемник 17, электронный переключатель выхода 18, измеритель интервала времени 19, вычислитель разности дальностей 20, процессор определения координат потребителя 23; второй выход приемника 17 дает начало последовательному соединению дешифратор 15, аналого-цифровой преобразователь 21, оперативное запоминающее устройство координат навигационных постов 22, выход которого соединен со вторым входом процессора 23.
Аппаратура опорного и ведомых постов (фиг. 4) по формированию навигационного поля работает в следующем порядке. Поле развертывания навигационных постов и определения их местоположения, в устройства ввода кода и координат 3 заносят соответствующие значения кодов и координат для каждого из постов: опорного и всех ведомых. Непосредственно перед применением в устройство ввода числа постов 3, длительности канала, периода навигационного поля 1 записывают данные, характеризующие параметры навигационного поля.
По данным, занесенным в устройство 1, схема формирования каналов и периода навигационного поля 2, генерирует последовательность синхронизирующих импульсов по числу навигационных постов. Последовательность следования синхронизирующих импульсов представлена на фиг. 2 - эпюры напряжений на выходе схемы формирования. При этом tk - длительность временного канала, tнс, Тнс - длительность и период формирования навигационного поля соответственно.
Каждый синхронизирующий импульс временного канала запускает модулятор 4 и устройство ввода кода и координат опорного поста 3, код и координаты модулируют высокочастотные колебания передатчика 5 первого поста и излучают в пространство.
Этот же синхронизирующий импульс временного канала воздействует на электронный переключатель выходов 11, выходы которого подключены ко входам устройств кодирования номеров ведомых постов 10.
На выходе каждого устройства кодирования 10 получают номер соответствующего ведомого поста, передатчик 9 и антенна 8 передают этот номер на запуск передатчика соответствующего номеру ведомого поста после прохождения базы d1i. Иллюстрация формирования моментов запуска передатчиков навигационных постов представлена на фиг. 2. Цифрой 1 показаны моменты запуска передатчика опорного поста, интервалы времени t1i отделяют моменты запуска передатчика i-го ведомого поста и зависят от выбранной базы d1i.
Аппаратура ведомых навигационных постов (фиг. 4, б) по структуре и выполняемым функциям совпадает с таковой в прототипе. По техническим признакам аппаратура представляет ретранслятор, по команде сигнала из состава синхронизирующих импульсов антенна излучает кодовый номер и прямоугольные координаты точки привязки каждого поста.
Таким образом в каждом временном канале tk длительности формирования навигационного поля tнс излучают электромагнитную энергию в следующей последовательности: кодовый номер 1-го (опорного) поста, его координаты, через время t1i кодовый номер i-го (ведомого) поста, его координаты; при этом электромагнитные колебания от первого поста достигнут потребителя информации первыми, от i-го поста - вторыми.
Антенна потребителя информации навигационного поля (фиг. 6) принимает сигналы, приемник усиливает, преобразует их. Левая ветвь функциональной схемы - дешифратор идентифицирует принадлежность координат к соответствующим постам, аналого-цифровой преобразователь выполняет свою функцию преобразования аналога в цифру, оцифрованные координаты всех постов заносят в ОЗУ. Второй выход приемника и электронный переключатель выхода обеспечивают подачу сигналов от опорного поста на 1-й вход и от ведомого i-го поста на 2-й вход измерителя интервала времени tИЗМ. Вычислитель разности дальностей определяет разность дальностей Д1-Дi=A1i=c⋅(t1i-tизмi), детально эта процедура раскрыта на фиг. 3, координатно-временное обеспечение разности дальностей потребителем информации.
Процессор определения координат реализует алгоритм решения системы линейных уравнений, представленный на фиг. 1 и при описании существенного признака.
Литература
1. ГЛОНАСС: принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. - 3-е изд., перераб. - М.: Радиотехника, 2005. - 688 с.
2. Ю.И. Никитенко, В.И. Быков, Ю.М. Устинов Судовые радионавигационные системы. -М.: Транспорт, 1992. - 336 с.
3. ГОСТ Р 54025-2010. Система радионавигационная «Чайка».
4. «Система навигации», патент на полезную модель RU 44190 U1, заявка 2004130926/22, 28.10.2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОПОЗИЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2022 |
|
RU2792013C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| Способ, реализующий точную помехоустойчивую синхронизацию опорных станций локальной навигационной системы | 2023 |
|
RU2827095C1 |
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2021 |
|
RU2775155C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |

Изобретение относится к радионавигационным системам по определению местоположения или получения информации, относящейся к местоположению, для целей навигации посредством свойств распространения радиоволн и свойств поверхностей (линий) положения. Технический результат заключается в создании мобильной радионавигационной многопозиционной разностно-дальномерной системы, способной дублировать сигналы глобальных навигационных систем при их потере на ограниченных участках земной поверхности. Заявленная система содержит аппаратуру опорного навигационного поста, ведомых постов и потребителя. Аппаратура опорного навигационного поста включает устройство ввода кода и координат поста, модулятор, передатчик и антенну. Аппаратура ведомых постов включает антенну, развязывающее устройство, усилитель радиочастоты, дешифратор, устройство ввода кода и координат поста, модулятор и передатчик. Аппаратура потребителя информации включает антенну, приемник, дешифратор, ОЗУ кодов и координат навигационных постов. Система дополнительно содержит устройство формирования навигационного поля с временным разделением каналов, устройство с учетом общего числа навигационных постов. 6 ил.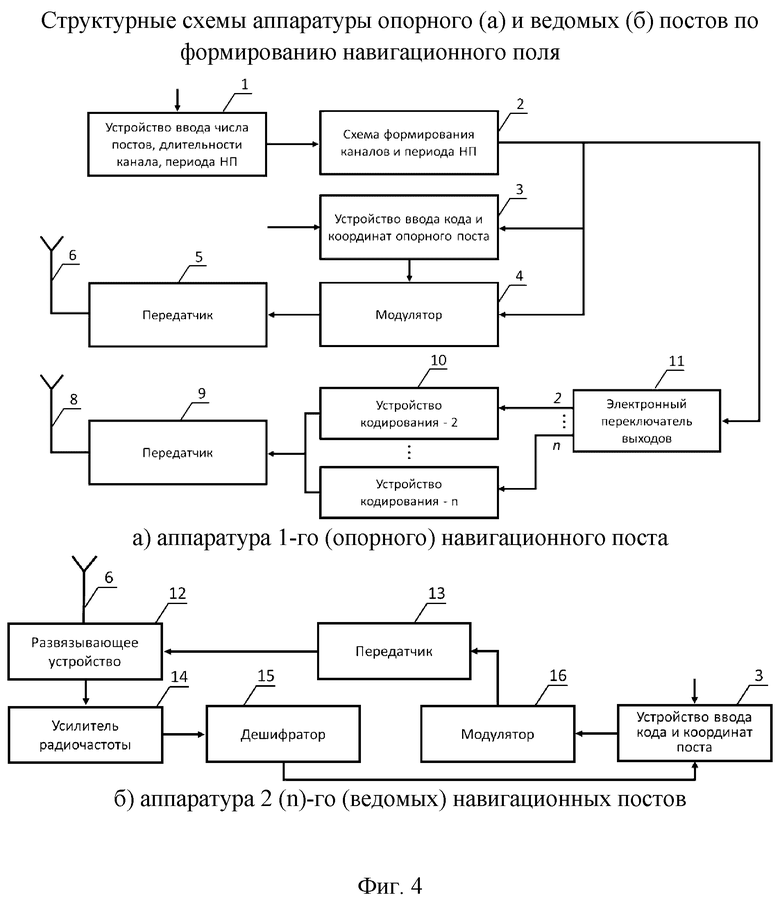
Радионавигационная многопозиционная разностно-дальномерная система, основанная на информационно-энергетическом взаимодействии опорного и ведомых навигационных постов и потребителя информации и содержащая в аппаратуре опорного навигационного поста устройство ввода кода и координат поста, модулятор, передатчик и антенну, в аппаратуре ведомых постов антенну, развязывающее устройство, усилитель радиочастоты, дешифратор, устройство ввода кода и координат поста, модулятор и передатчик; в аппаратуре потребителя информации антенну, приемник, дешифратор, ОЗУ кодов и координат навигационных постов, отличающаяся тем, что она содержит: в аппаратуре опорного поста устройство ввода числа постов, длительности канала, периода навигационного поля, выход которого подключен ко входу схемы формирования каналов и периода навигационного поля, выход последней подключен ко входам устройства ввода кода и координат опорного поста, модулятора и электронного переключателя выходов, каждый из которых подключен ко входу соответствующего устройства кодирования, выходы последних соединены со входом передатчика, выход его нагружен на антенну; в аппаратуре потребителя информации выход приемника соединен со входом электронного переключателя выхода, оба выхода переключателя соединены со входами измерителя интервала времени, выход которого нагружен на вход вычислителя разности дальностей, выход соединен со входом процессора определения координат потребителя, последовательно соединенные дешифратор, аналого-цифровой преобразователь, ОЗУ координат нагружено на второй вход процессора.

