Изобретение относится к радиоокеанографии и предназначено для неконтактных измерений характеристик поверхностного волнения радиолокационными средствами.
Известно устройство, в которое входит импульсная РЛС с индикатором кругового обзора (ИКО) и фотоаппарат (Дремлюк В.В. Об определении некоторых элементов морских волн с помощью радиолокатора. Труды Арктического и антарктического научно-исследовательского института, 1961, т. 210, вып.1, с. 135-138). Надводная обстановка отображается на экране ИКО. Изображения на ИКО фотографируют и на основании анализа этих снимков определяют характеристики поверхностного волнения. Зона эхосигналов от морской поверхности на ИКО имеет форму овала, причем наибольшая ее часть расположена с наветренной стороны. Генеральное направление распространения волн определяют по круговой шкале радиолокатора на фотографиях. Для определения длины волны производят измерение расстояния между гребнями волн непосредственно на фотоснимке экрана радиолокатора с учетом масштаба изображения. Период волн определяют путем фиксации промежутка времени, за который через одну и ту же точку экрана пройдут два последовательных импульса от подветренных склонов волн.
Однако такое устройство может быть реализовано только на базе РЛС с высокой разрешающей способностью, обеспечивающей раздельное изображение на ИКО поверхностных волн, и не может быть реализовано при использовании РЛС с низкой разрешающей способностью. Кроме того, результат измерения и его точность в значительной степени зависят от квалификации и опыта оператора.
Указанный недостаток устраняется при использовании устройства для измерения характеристик морского волнения, содержащего приемопередатчик импульсной РЛС, синхронизатор, блок формирования стробирующих импульсов, соединенные последовательно детектор огибающей, нормализатор, интегратор и регистратор, в котором выход синхронизатора соединен с соответствующими входами приемопередатчика и блока формирования стробирующих импульсов, вход детектора огибающей - с выходом приемопередатчика, а выход блока формирования стробирующих импульсов - с управляющим входом детектора огибающей, которое по совокупности существенных признаков наиболее близко к предложенному и принято за прототип.
В данном устройстве видеосигнал с выхода приемопередатчика поступает на детектор огибающей, который запоминает амплитудное значение сигнала только в моменты поступления стробимпульсов на его управляющий выход. Блок формирования стробирующих импульсов синхронизируется импульсами, поступающими от синхронизатора. Частота следования стробимпульсов соответствует частоте следования зондирующих импульсов, а время задержки первых относительно последних определяет расстояние от РЛС до стробируемого участка морской поверхности. На выходе детектора огибающей выделяется огибающая видеоимпульсов, принятых с фиксированной дальности. Это напряжение подается на нормализатор, вырабатывающий нормированные по амплитуде и длительности импульсы в моменты пересечения огибающей среднего уровня. В результате интегрирования нормализованных импульсов за определенный интервал времени на выходе интегратора получается напряжение, пропорциональное средней частоте флуктуаций огибающей отраженных сигналов, которое измеряется регистрирующим прибором и значение которого связано с высотой поверхностных волн. Данное устройство позволяет измерять следующие характеристики волнения: высоту волн; генеральное направление распространения волн; групповую структуру волн.
Генеральное направление распространения волн определяют путем анализа азимутальной зависимости средней частоты флуктуаций огибающей, полученной при вращении антенны РЛС, имеющей достаточно узкую диаграмму направленности в горизонтальной плоскости. Максимальное значение средней частоты флуктуаций огибающей получается при облучении вдоль генерального направления распространения волн, а минимальное - при облучении вдоль гребней волн.
Высоту волн находят по полусумме максимального и минимального значений средней частоты флуктуаций огибающей в ее азимутальной зависимости. Групповую структуру морских волн исследует путем анализа измерений во времени измеренных значений высоты волн.
При использовании данного устройства необходимо обеспечить отсутствие ограничения отраженных сигналов по амплитуде в приемном тракте РЛС, что рекомендуется делать путем установки перед измерениями с помощью ручек, имеющихся на пульте управления РЛС, соответствующих коэффициентов усиления УПЧ (ручка "Усиление") и временной автоматической регулировки усиления (ручка "Вару") и выбора расстояния до стробируемого участка морской поверхности. Однако в ряде судовых навигационных РЛС (например, типа "Миус", "Кивач", "Наяда") данные ручки на пульте управления РЛС отсутствуют, а изменение указанных коэффициентов при работе РЛС невозможно. Кроме того, изменения уровня радиолокационных отражений от стробируемого участка морской поверхности, обусловленные групповой структурой волн и качкой судна, могут достигать 20 дБ и более. В этом случае обеспечить отсутствие ограничения отраженных сигналов по амплитуде не представляется возможным даже при наличии возможности регулировки указанных выше коэффициентов, поскольку динамический диапазон приемных трактов судовых навигационных РЛС не превышает 20 дБ. Таким образом, обеспечить отсутствие ограничения отраженных от стробируемого участка морской поверхности сигналов в приемном тракте судовой навигационной РЛС в большинстве реальных случаев не представляется возможным. При наличии ограничений средняя частота флуктуаций огибающей, определенная по числу пересечений огибающей среднего уровня за определенный интервал времени, будет меньше истинного значения, что ведет к занижению результатов измерений высоты морских волн, т.е. к появлению систематической погрешности измерений. В результате наличие ограничений по амплитуде отраженных сигналов в приемном тракте РЛС приводит к увеличению суммарной погрешности измерений высоты волн.
Целью изобретения является повышение точности измерения высоты поверхностных волн.
Это достигается тем, что в устройство, содержащее приемопередатчик импульсной РЛС, вход синхронизации которого соединен с выходом синхронизатора, регистратор и детектор огибающей, вход которого соединен с выходом приемопередатчика, введены линия задержки, генератор импульсов, электронный ключ, счетчик числа импульсов, генератор тактовых импульсов, четыре триггера, два электронных коммутатора, три элемента ИЛИ, элемент И, программируемый счетчик, делитель частоты, блок начального запуска, аналого-цифровой преобразователь (АЦП), два регистра хранения и два цифровых компаратора, при этом первый триггер, элемент И, линия задержки, первый электронный коммутатор и генератор импульсов соединены последовательно, установочный вход триггера подключен к выходу синхронизатора, выход генератора импульсов - к управляющему входу детектора огибающей, выход приемопередатчика - к второму входу элемента И, выход которого соединен с вторым входом первого электронного коммутатора и входом сброса первого триггера, вход АЦП подключен к выходу детектора огибающей, а выход АЦП - к входам регистров хранения и к вторым входам (В) каждого компаратора, первые входы которых соединены с выходами соответствующего регистра хранения, генератор тактовых импульсов, электронный ключ, программируемый счетчик, первый элемент ИЛИ и второй триггер (установочный вход) включены последовательно, выход второго триггера соединен с управляющими входами электронных коммутаторов, второй вход первого элемента ИЛИ - с выходом блока начального запуска, выход первого электронного коммутатора соединен с запускающим входом АЦП, выход АЦП "Конец преобразования" - с входом второго электронного коммутатора, первый выход которого подключен к управляющему входу второго компаратора, а второй выход - к управляющему входу второго регистра хранения непосредственно и через делитель частоты - к входам сброса второго триггера и счетчиков, выход А > В первого цифрового компаратора соединен с входом установки четвертого триггера и первым входом второго элемента ИЛИ, второй вход которого подключен к выходу А < В первого цифрового компаратора и входу сброса четвертого триггера, а выход - к управляющему входу первого регистра хранения, четвертый триггер (вход установки), счетчик числа импульсов и регистратор соединены последовательно, выход А > В второго цифрового компаратора подключен к управляющему входу первого цифрового компаратора и к входу сброса третьего триггера, а выходы А = В и А < В через третий элемент ИЛИ - к входу установки третьего триггера, выход которого соединен с управляющим входом электронного ключа, выход программируемого счетчика соединен с управляющим входом регистратора.
На фиг.1 приведена структурная электрическая схема устройства; на фиг.2 и 3 - эпюры напряжений.
Устройство содержит приемопередатчик 1 импульсной РЛС, синхронизатор 2, детектор 3 огибающей, генератор 4 импульсов, первый электронный коммутатор 5, линию 6 задержки, элемент И 7 первый триггер 8, аналого-цифровой преобразователь 9, второй электронный коммутатор 10, второй триггер 11, делитель 12 частоты, первый элемент ИЛИ 13, блок 14 начального запуска, первый регистр 15 хранения, второй регистр 16 хранения, программируемый счетчик 17, первый цифровой компаратор 18, второй цифровой компаратор 19, электронный ключ 20, второй элемент ИЛИ 21, третий элемент ИЛИ 22, третий триггер 23, генератор 24 тактовых импульсов, четвертый триггер 25, счетчик 26 числа импульсов, регистратор 27.
Вход синхронизации приемопередатчика 1 подключен к выходу синхронизатора 2, а выход - к входу детектора 3 огибающей, первый триггер 8, элемент И 7, линия 6 задержки, первый электронный коммутатор 5 и генератор 4 импульсов соединены последовательно, установочный вход первого триггера 8 подключен к выходу синхронизатора 2; выход генератора 4 импульсов - к управляющему входу детектора 3 огибающей, выход приемопередатчика 1 - к второму входу элемента И 7, выход которой соединен с вторым входом первого электронного коммутатора 5 и входом сброса первого триггера 8, вход АЦП 9 подключен к выходу детектора 3 огибающей, а выход АЦП 9 - к входам регистров 15 и 16 хранения и к вторым входам (В) каждого компаратора 18 и 19, первые входы (А) которых соединены с выходом соответствующего регистра хранения, генератор 34 тактовых импульсов, электронный ключ 20, программируемый счетчик 17, первый элемент ИЛИ 13 и второй триггер 11 (установочный вход) включены последовательно, выход второго триггера 11 соединен с управляющими входами электронных коммутаторов 5 и 10, второй вход первого элемента ИЛИ 13 - с выходом блока 14 начального запуска, выход первого электронного коммутатора 5 - с запускающим входом АЦП 9, выход АЦП 9 "Конец преобразования" - с входом второго электронного коммутатора 10, первый выход которого подключен к управляющему входу второго компаратора 19, а второй выход - к управляющему входу второго регистра 16 хранения непосредственно и через делитель частоты 12 - к входам сброса второго триггера 11 и счетчиков 17 и 26, выход А > В первого цифрового компаратора 18 соединен с входом установки четвертого триггера 25 и первым входом второго элемента ИЛИ 21, второй вход которого подключен к выходу А < В первого цифрового компаратора 18 и входу сброса четвертого триггера 25, а выход - к управляющему входу первого регистра 15 хранения, четвертый триггер 25 (вход установки), счетчик 26 числа импульсов и регистратор 27 соединены последовательно, выход А > В второго цифрового компаратора 19 подключен к управляющему входу первого компаратора 18 и к входу сброса третьего триггера 23, а выходы А = В и А < В через третий элемент ИЛИ 22 - к входу установки третьего триггера 23, выход которого соединен с управляющим входом электронного ключа 20, выход программируемого счетчика 17 соединен с управляющим входом регистратора 27.
При поступлении синхроимпульса U2 (cм.фиг.2) на вход первого триггера 8 на выходе последнего появляется сигнал U8, который поступает на один из выходов элемента И 7. Видеосигнал U1, поступающий с блока 1, состоит из двух импульсов, первый - прямоугольный импульс, длительность которого τи и временное положение совпадает с длительностью и временным положением зондирующего импульса, обусловлен просачиванием части сигнала передатчика в приемный тракт, второй импульс сложной формы формируется отражениями от морской поверхности. При поступлении на второй вход элемента И 7 от приемопередатчика 1 сигнала, сформированного за счет просачивания в приемный канал части энергии при излучении зондирующего импульса, на выходе элемента И 7 получается импульс U7, временное положение которого соответствует временному положению зондирующего импульса. Импульс с выхода элемента U 7, поступая на вход сброса первого триггера 8, устанавливает его в нулевое положение. Этот же импульс, задержанный в линии 6 задержки на время tзад, определяемое дистанцией до исследуемого участка морской поверхности, либо без задержки, пройдя через первый коммутатор 5, запускает генератор 4 импульсов. Выход первого электронного коммутатора 5 подключен к первому входу (А) при отсутствии сигнала на управляющем входе коммутатора и переключается на второй вход (В) при наличии управляющего сигнала. На выходе генератора 4 импульсов формируются стробимпульсы U4 требуемой длительности τстр,время задержки которых относительно зондирующих импульсов составляет tзад либо равно нулю.
Сигнал c выхода приемопередатчика 1 поступает на вход детектора 3 огибающей, который запоминает амплитудное значение сигнала только в моменты поступления на его управляющий вход стробирующих импульсов от генератора 4. При нулевой задержке стробирующих импульсов сигнал на выходе детектора 3 огибающей будет соответствовать уровню ограничения, так как сигнал, просачивающийся в приемный тракт РЛС во время излучения зондирующих импульсов, всегда обеспечивает достижения уровня ограничения. При задержке стробирующих импульсов на время tзад на выходе детектора 3 огибающей выделяется огибающая импульсов, отраженных от выбранного участка морской поверхности.
Cигнал с выхода детектора 3 огибающей с помощью АЦП 9, запускаемой задним фронтом импульса с выхода первого электронного коммутатора 5, преобразуется в цифровую форму и поступает на входы регистров 15 и 16 хранения и на вторые входы (В) цифровых компараторов 18 и 19. Вход второго электронного коммутатора 10 подключен к первому выходу (А) при отсутствии сигнала на его управляющем входе и переключается на второй выход (В) при наличии управляющего сигнала на коммутаторах 5 и 10. Во втором случае сигнал на выходе детектора 3 огибающей, соответствующий уровню ограничения, после преобразования в АЦП 9 по сигналу "Конец преобразования", проходящему через второй электронный коммутатор 10, фиксируется во втором регистре 16 хранения. При отсутствии сигнала на управляющем входе электронных коммутаторов 5 и 10 сигнал на выходе детектора 3 огибающей, сформированный за счет отражений от исследуемого участка морской поверхности, по сигналу "Конец преобразования", поступающему от АЦП 9 через второй электронный коммутатор 10 на управляющий вход второго цифрового компаратора 19, сравнивается в цифровом компараторе 19 с уровнем ограничения. При достижении отраженным сигналом уровня ограничения (А= В или А < В) cигнал соответствующего выхода второго цифрового компаратора 19 через третий элемент ИЛИ 22 поступает на вход установки третьего триггера 23, на выходе которого появляется сигнал. Если отраженный сигнал не достигает уровня ограничения (А > В), сигнал с выхода А > В второго цифрового компаратора 19 устанавливает в нулевое состояние третий триггер 23. В результате на выходе третьего триггера 23 формируется импульс, длительность τогр которого соответствует интервалу ограничения отраженного сигнала (см. U23 на фиг.3).
При отсутствии ограничения отраженного сигнала по сигналу с выхода А > В второго цифрового компаратора 19 в первом цифровом компараторе 18 выполняется сравнение отраженного сигнала с сигналом, полученным при предыдущем зондировании и записанным в первом регистре 15 хранения, управляемом сигналом с выхода второго элемента ИЛИ 21. Если отраженный сигнал при предыдущем зондировании был больше, то появляется сигнал на выходе А > > В первого цифрового триггера 25, устанавливает последний в единичное состояние. В случае, когда сигнал при предыдущем зондировании был меньше, появляется сигнал на выходе А < В первого цифрового компаратора 18, который устанавливает в нулевое состояние четвертый триггер 25. В результате при каждой флуктуации отраженного сигнала на выходе четвертого триггера 25 формируется импульс, длительность которого приблизительно равна половине времени (текущего периода) флуктуации.
Таким образом количество импульсов на выходе четвертого триггера 25 соответствует числу флуктуаций отраженного сигнала. Эти импульсы считаются счетчиком 26 числа импульсов, а результат счета Nсчпропорционален средней частоте флуктуаций отраженных сигналов, соответствующей средней высоте морских волн, которая фиксируется регистратором 27.
Средняя частота флуктуаций определяется по количеству Nсчимпульсов, сосчитанных счетчиком 26 числа импульсов по формуле
fср = Ncч/tизм. Время измерения tизм = NтТт определяется количеством Nт и периодом Тттактовых импульсов, поступающих от генератора 24 тактовых импульсов через электронный ключ 20 на программируемый счетчик 17. Требуемое время измерения задают путем установки в программируемом счетчике 17 необходимого значения Nт. При наличии ограничений отраженных сигналов электронный ключ 20 закрыт сигналом, поступающим на его управляющий вход с выхода третьего триггера 23, а тактовые импульсы не поступают на вход программируемого счетчика 17 (см.фиг.3). Время счета (продолжительность цикла измерения) tсч определяется по формуле
tсч=tизм+ ,, где τогрi - длительность i-го интервала ограничения сигнала; n - количество интервалов ограничений за время tсч.
,, где τогрi - длительность i-го интервала ограничения сигнала; n - количество интервалов ограничений за время tсч.
Таким образом, при определении средней частоты флуктуаций исключаются интервалы времени, на которых имеет место ограничение сигнала, чем исключается погрешность измерения средней частоты флуктуаций, обусловленная этими ограничениями. Следовательно повышается точность измерения высоты поверхностных волн.
После того, как программируемый счетчик 17 сосчитает Nт тактовых импульсов, на выходе его появляется сигнал, поступающий через первый элемент ИЛИ 13 на установочный вход второго триггера 11, на выходе которого появляется сигнал, управляющий электронными коммутаторами 5 и 10.
Начинается следующий цикл измерений. Первый запуск устройства (начало первого цикла измерений) осуществляют путем подачи сигнала от блока 14 начального запуска через первый элемент ИЛИ 13 на установочный вход второго триггера 11. Длительность запускающего импульса τ14 Тn. Блок 14 начального запуска может быть выполнен, например, в виде генератора импульсов, работающего в ручном (ждущем) режиме запуска. Второй триггер 11 устанавливается в нулевое состояние сигналом с выхода делителя 12 частоты следования импульсов, на выход которого проходит только каждый второй импульс из поступающих на его вход. Этим обеспечивается гарантия того, что к моменту установки второго триггера 11 в нулевое состояние в регистр 16 хранения будет записан сигнал, соответствующий уровню ограничения. Сигнал с выхода делителя 12 частоты, кроме того, устанавливает в исходное (нулевое) состояние программируемый счетчик 17 и счетчик 26 числа импульсов. Регистратор 27 управляется сигналом с выхода программируемого счетчика 17. При поступлении сигнала с выхода программируемого счетчика 17 на управляющий вход регистратора 27 обеспечивается отображение на последнем результате измерения. Минимальная длительность импульсов на выходе программируемого счетчика 17, определяющая необходимое быстродействие регистратора 27, равна периоду Тп повторения зондирующих импульсов.
Тn. Блок 14 начального запуска может быть выполнен, например, в виде генератора импульсов, работающего в ручном (ждущем) режиме запуска. Второй триггер 11 устанавливается в нулевое состояние сигналом с выхода делителя 12 частоты следования импульсов, на выход которого проходит только каждый второй импульс из поступающих на его вход. Этим обеспечивается гарантия того, что к моменту установки второго триггера 11 в нулевое состояние в регистр 16 хранения будет записан сигнал, соответствующий уровню ограничения. Сигнал с выхода делителя 12 частоты, кроме того, устанавливает в исходное (нулевое) состояние программируемый счетчик 17 и счетчик 26 числа импульсов. Регистратор 27 управляется сигналом с выхода программируемого счетчика 17. При поступлении сигнала с выхода программируемого счетчика 17 на управляющий вход регистратора 27 обеспечивается отображение на последнем результате измерения. Минимальная длительность импульсов на выходе программируемого счетчика 17, определяющая необходимое быстродействие регистратора 27, равна периоду Тп повторения зондирующих импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ | 1990 |
|
RU2018874C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПОВЕРХНОСТНОГО ВОЛНЕНИЯ | 1990 |
|
RU2018873C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2510040C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| Устройство измерения параметров морского волнения | 1978 |
|
SU734591A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОРСКОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2024034C1 |
Использование: для измерения характеристик морского волнения. Сущность изобретения: устройство для измерения характеристик морского волнения содержит приемопередатчик 1, синхронизатор 2, детектор огибающей 3, генератор импульсов 4, электронный коммутатор 5, линию задержки 6, элемент И 7, триггер 8, АЦП 9, электронный коммутатор 10, триггер 11, делитель частоты 12, элемент ИЛИ 13, блок начального запуска 14, регистры 15, 16, программируемый счетчик 17, цифровые компараторы 18, 19, электронный ключ 20, элементы ИЛИ 21, 22, триггер 23, генератор тактовых импульсов 24, триггер 25, счетчик 26, регистратор 27. 3 ил.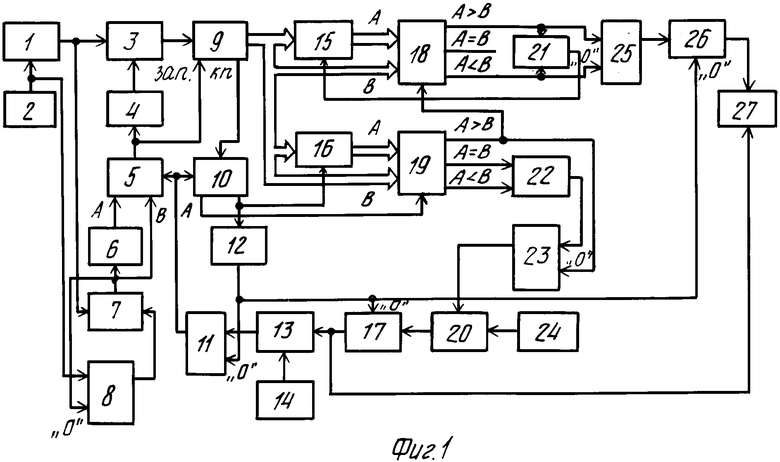
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ, содержащее приемопередатчик импульсной РЛС, вход синхронизации которого соединен с выходом синхронизатора, регистратор и детектор огибающей, вход которого соединен с выходом приемопередатчика, отличающееся тем, что, с целью повышения точности измерения высоты поверхностных волн, в него введены линия задержки, генератор импульсов, электронный ключ, счетчик числа импульсов, генератор тактовых импульсов, четыре триггера, два электронных коммутатора, три элемента ИЛИ, элемент И, программируемый счетчик, делитель частоты, блок начального запуска, аналого-цифровой преобразователь (АЦП), два регистра хранения и два цифровых компаратора, при этом первый триггер, элемент И, линия задержки, первый электронный коммутатор и генератор импульсов соединены последовательно, установочный вход первого триггера подключен к выходу синхронизатора, выход генератора импульсов - к управляющему входу детектора огибающей, выход приемопередатчика - к второму входу элемента И, выход которого соединен с вторым входом первого электронного коммутатора и входом сброса первого триггера, вход АЦП подключен к выходу детектора огибающей, а выход АЦП - к входам регистров хранения и вторым входам (B) каждого компаратора, первые входы которых соединены с выходами соответствующего регистра хранения, генератор тактовых импульсов, электронный ключ, программируемый счетчик, первый элемент ИЛИ и второй триггер (установочный вход) включены последовательно, выход второго триггера соединен с управляющими входами электронных коммутаторов, второй вход первого элемента ИЛИ - с выходом блока начального запуска, выход первого электронного коммутатора соединен с запускающим входом АЦП, выход АЦП "Конец преобразования" - с входом второго электронного коммутатора, первый выход которого подключен к управляющему входу второго компаратора, а второй выход - к управляющему входу второго регистра хранения непосредственно и через делитель частоты - к входам сброса второго триггера и счетчиков, выход A > B первого цифрового компаратора соединен с входом установки четвертого триггера и первым входом второго элемента ИЛИ, второй вход которого подключен к выходу A < B первого цифрового компаратора и входу сброса четвертого триггера, а выход - к управляющему входу первого регистра хранения, четвертый триггер (вход установки), счетчик числа импульсов и регистратор соединены последовательно, выход A > B второго цифрового компаратора подключен к управляющему входу первого цифрового компаратора и входу сброса третьего триггера, а выходы A = B и A < B через третий элемент ИЛИ - к входу установки третьего триггера, выход которого соединен с управляющим входом электронного ключа, выход программируемого счетчика соединен с управляющим входом регистратора.
| Жилко Е.Ю., Поправко А.У | |||
| и Шаронин В.Ж | |||
| Измерение волнения при помощи береговых РЛС | |||
| В сб | |||
| Неконтактные методы измерения океанографических параметров | |||
| М.: Гидрометеоиздат, 1975, с.91-96. |
