Изобретение относится к области измерительной техники, к оборудованию, обеспечивающему безопасность мореплавания по средствам анализа состояния взволнованной морской поверхности.
Известно устройство, в которое входят импульсная радиолокационная станция (РЛС) с индикатором кругового обзора (ИКО) и фотоаппарат (Дремлюк В.В. Об определении некоторых элементов морских волн с помощью радиолокатора. - Труды Арктического и антарктического научно-исследовательского института, 1961, т.210, вып.1, с.135-138).
Надводная обстановка отображается на экране ИКО. Изображения на ИКО фотографируют и на основании анализа этих снимков определяют характеристики поверхностного волнения. Зона эхосигналов от морской поверхности на ИКО имеет форму овала, причем наибольшая ее часть расположена с наветренной стороны. Генеральное направление распространения волн определяют по круговой шкале радиолокатора на фотографиях. Для определения длины волны производят измерение расстояния между гребнями волн непосредственно на фотоснимке экрана радиолокатора с учетом масштаба изображения. Период волн определяют путем фиксации промежутка времени, за который через одну и ту же точку экрана пройдут два последовательных импульса от подветренных склонов волн.
Однако такое известное устройство может быть реализовано только на базе РЛС с высокой разрешающей способностью, обеспечивающей раздельное изображение на ИКО поверхностных волн, и не может быть реализовано при использовании РЛС с низкой разрешающей способностью. Кроме того, результат измерения и его точность в значительной степени зависят от квалификации и опыта оператора.
Указанный недостаток устраняется при использовании известного устройства для измерения характеристик поверхностного волнения, содержащего антенну, поворотное устройство антенны, датчик углового положения антенны, приемопередатчик, соединенный с антенной, синхронизатор, блок формирования стробирующих импульсов, соединенные последовательно детектор огибающей, нормализатор, интегратор и регистратор, в котором выход синхронизатора соединен с соответствующими входами приемопередатчика и блока формирования стробирующих импульсов, вход детектора огибающей - с выходом приемопередатчика, а выход блока формирования стробирующих импульсов - с управляющим входом детектора огибающей (Жилко Е.О., Поправко А.Ф., Шаронин В.М. Измерение волнения при помощи береговых РЛС. В сб. "Неконтактные методы измерения океанографических параметров". М.: Гидрометеоиздат, 1975, с.91-96). Данное известное устройство позволяет измерять следующие характеристики волнения: высоту волн; генеральное направление распространения волн; групповую структуру волн. При использовании данного устройства необходимо обеспечить отсутствие ограничения отраженных сигналов по амплитуде в приемном тракте РЛС, что рекомендуется делать путем установки перед измерениями с помощью ручек, имеющихся на пульте управления РЛС, соответствующих коэффициентов усиления УПЧ (ручка "Усиление") и временной автоматической регулировки усиления (ручка "ВАРУ") и выбора расстояния до стробируемого участка морской поверхности. Однако в ряде судовых навигационных РЛС (например, типа "Миус"; "Кивач", "Нянда") данные ручки на пульте управления РЛС отсутствуют, а изменение указанных коэффициентов при работе РЛС невозможно. Кроме того, изменения уровня радиолокационных отражений от стробируемого участка морской поверхности, обусловленные групповой структурой волн и качкой судна, могут достигать 20 дБ и более. В этом случае обеспечить отсутствие ограничения отраженных сигналов по амплитуде не представляется возможным даже при наличии возможности регулировки указанных выше коэффициентов, поскольку динамический диапазон приемных трактов судовых навигационных РЛС не превышает 20 дБ. Таким образом обеспечить отсутствие ограничения отраженных от стробируемого участка морской поверхности сигналов в приемном тракте судовой навигационной РЛС в большинстве реальных случаев не представляется возможным.
Так же известно и принято за прототип «Устройство для измерения характеристик поверхностного волнения» [Патент РФ №2018873], которое содержит радиолокационную станцию, включающую антенну, синхронизатор, датчик углового положения антенны (блок углового положения антенны), который соединен механической связью с основанием антенны, электронный ключ (антенный переключатель), индикатор а также приемник и передатчик, при этом выход синхронизатора соединен с входом передатчика, а выход передатчика соединен со входом электронного ключа (антенного переключателя), первую линию задержки, блок выделения заднего фронта, блок азимутальной селекции, делитель частоты, многоканальный накопитель, вторую линию задержки, анализатор, регистратор. Блок азимутальной селекции содержит N каналов, содержащих источники постоянного напряжения, компараторы, генераторы импульсов, элементы И, программируемые счетчики и электронные ключи, элемент ИЛИ на N входов и электронный ключ блока азимутальной селекции.
Известное устройство работает следующим образом. Видеосигнал с выхода приемника проходит через электронный ключ на интегратор только при наличии на управляющем входе электронного ключа разрешающего сигнала, поступающего в виде прямоугольного импульса с выхода блока формирования стробирующих импульсов, который синхронизируется импульсами, поступающими от синхронизатора. Видеосигнал на выходе приемопередатчика представляет собой последовательность, состоящую из прямоугольного импульса, обусловленного просачиванием сигнала в приемный тракт РЛС при излучении зондирующего импульса, и сигнала сложной формы, обусловленного отражениями от морской поверхности. После интегрирования видеосигнала, обусловленного отражениями от морской поверхности, на выходе интегратора получается напряжение, соответствующее энергии wij радиолокационных отражений от морской поверхности при j-м зондировании в i-м азимутальном направлении. В результате при каждом обороте антенны в каналы многоканального накопителя, каждый из которых соответствует определенному азимутальному положению антенны, поступает одинаковое количество импульсов одинаковой длительности, амплитуда которых соответствует энергии wij радиолокационных отражений от морской поверхности. Далее анализатор на основании сравнения между собой элементов массива wcpl,…,wcpi,…,wcpN выбирает максимальный из них wcp.макс.=wcpi (где i - номер канала; i=1,2,…N). Сигнал с выхода анализатора, соответствующий wcp.макс, значение которого связано с высотой поверхностных волн, измеряется регистратором. Кроме того, на регистратор передается от анализатора номер i-го канала, определяющий генеральное направление распространения поверхностных волн. Это и обуславливает недостатки известного устройства.
Недостатками известного устройства являются сложность технологического исполнения, и отсюда необходимость согласования уровней синхронизации сигналов РЛС с достаточно большим количеством элементов (узлов), высокая погрешность результатов измерения при возникновении случайной помехи и флуктуация угловой скорости вращения антенны, а так же необходимость наличия соответствующей квалификации и опыта оператора.
Технической задачей, на которую направленно заявляемое изобретение, является устранение указанных недостатков, а именно, упрощение конструктивного исполнения устройства, повышение точности измерения характеристик морского волнения.
Поставленная техническая задача достигается тем, что в известном устройстве для определения состояния морской поверхности, содержащем радиолокационную станцию, включающую антенну, синхронизатор, датчик углового положения антенны (блок углового положения антенны), который соединен механической связью с основанием антенны, электронный ключ (антенный переключатель), индикатор а также приемник и передатчик, при этом выход синхронизатора соединен со входом передатчика, а выход передатчика соединен со входом электронного ключа (антенного переключателя), В ОТЛИЧИЕ ОТ НЕГО в заявляемом дополнительно содержатся аналого-цифровой преобразователь и соединенное с ним на выходе вычислительное устройство. Передатчик радиолокационной станции дополнительно содержит модулятор и генератор сверхвысокой частоты, вход которого соединен с выходом модулятора; при этом второй выход синхронизатора соединен со входом индикатора, упомянутый первый выход синхронизатора соединен со входом модулятора передатчика, а его генератор сверхвысокой частоты соединен на выходе со входом электронного ключа (антенного переключателя), выход которого соединен со входом приемника, а выход приемника соединен со вторым входом индикатора, второй выход приемника соединен со входом аналогового канала аналого-цифрового преобразователя, второй вход которого - вход синхронных цифровых данных соединен с выходом датчика углового положения антенны (блока углового положения антенны), второй выход которого соединен с третьим входом индикатора, а третий вход аналого-цифрового преобразователя - вход внешней синхронизации соединен с третьим выходом синхронизатора, а антенна электрически связанна с электронным ключом. Целесообразно выполнение заявляемого устройства, когда находящееся в его составе вычислительное устройство выполнено в виде персонального компьютера.
Совокупность отличительных и ограничительных признаков заявляемого изобретения, выражающаяся в установке дополнительно аналого-цифрового преобразователя и вычислительного устройства, являющихся серийными, и в совокупности с их связями, обеспечивает достижение поставленной технической задачи следующим путем. Каждый аналоговый видеоимпульс со второго выхода приемника РЛС поступает на первый вход аналого-цифрового преобразователя, в котором преобразуется в цифровую форму. С учетом данных, поступающих с первого выхода блока углового положения антенны на второй вход - вход синхронных цифровых данных устройства аналого-цифрового преобразования, оцифрованные значения видеоимпульсов полного оборота антенны записываются в массив данных вычислительного устройства с соответствующим значением положения угла антенны. Размер данного массива обусловлен объемом встроенной памяти конкретного вычислительного устройства, в частности персонального компьютера. Для выявления структуры полей волн морской поверхности анализ накопленных в нем данных, с помощью специального программного обеспечения (является ноу-хау), производится на основе расчета двумерной автокорреляционной функции.
Расчет данной двумерной автокорреляционной функции происходит для выбранного оператором сектора, например, длинной от 400 до 700 м удаления от антенны РЛС и шириной 5°. Каждый последующий расчет происходит при очередном смещении сектора на 2.5° по всей окружности.
Сравнение значений двумерной автокорреляционной функции происходит в вычислительном устройстве по уровню среднеквадратичного значения, т.е. 1/√2 (0.707) от максимального. Двумерная автокорреляционная функция, ширина которой на уровне 0.707 от максимального значения будет наибольшая за полный оборот антенны, соответствует направлению фронта волны с достаточной точностью ±2.5°, т.к. чем выше интенсивность морского волнения, тем больше эффективная поверхность рассеяния фронта волны при зондировании. За счет этого уровень принимаемого сигнала выше и, соответственно, выше энергия видеоимпульса. Площадь автокорреляционной функции на уровне 0.707 от максимального значения пропорциональна высоте волны.
После сравнения данных за несколько полных оборотов антенны на индикаторе вычислительного устройства автоматически проецируется с достаточной точностью значение состояния морского волнения. За счет этого повышается точность определения параметров. Процесс анализа, необходимая корректировка расчетных коэффициентов программного продукта при возможном изменении настроек оборудования, происходят автоматически и не требуют специальных навыков пользователя. Этим обеспечивается достижение поставленной технической задачи - упрощение конструкции и повышение точности измерений. Дополнительным эффектом является автоматизация процесса анализа, что не требует соответствующей квалификации оператора.
Предлагаемое изобретение поясняется следующим графическим материалом.
На чертеже представлена блок-схема, позволяющая реализовать устройство для определения состояния морской поверхности.
Заявляемое устройство для определения состояния морской поверхности в своем составе содержит радиолокационную станцию 1, включающую синхронизатор 2, вырабатывающий последовательность запускающих видеоимпульсов, выход которого соединен со входом передатчика 3, состоящего из модулятора 4 и генератора сверхвысокой частоты 5, вход которого соединен с выходом модулятора, который под действием синхронизирующих импульсов генерирует мощные, короткие радиоимпульсы, и выход которого соединен со входом электронного ключа (антенного переключателя) 6, приемник 7, усиливающий принятые отраженные сигналы и преобразующий их в видеоимпульсы, вход которого соединен с выходом антенного переключателя 6, индикатор 8, первый вход которого соединен со вторым выходом синхронизатора 2, а второй вход соединен с выходом приемника 7. Устройство так же содержит входящие в РЛС антенну 9 и датчик (блок передачи данных) углового положения антенны 10, который соединен механической связью (не показано) с основанием антенны, и дополнительно аналого-цифровой преобразователь 11 и соединенное с ним на выходе вычислительное устройство 12. При этом второй выход приемника 7 соединен со входом аналогового канала аналого-цифрового преобразователя 11, а выход блока передачи данных углового положения антенны 10 соединен со вторым входом - входом синхронных цифровых данных аналого-цифрового преобразователя 11, второй выход которого соединен с третьим входом индикатора 8. Причем, третий вход -вход внешней синхронизации аналого-цифрового преобразователя 11 соединен с третьим выходом синхронизатора.
Аналого-цифровой преобразователь 11 и вычислительное устройство, например, персональный компьютер 12 являются серийными устройствами и, в зависимости от типа, их соединение может осуществляться через разъемы (не показано) PSI (Peripheral Component Interconnect - шина соединения периферийных компонентов), USB (Universal Serial Bus -универсальная последовательная шина, является промышленным стандартом расширения архитектуры ПК) и др.
В качестве примера, для реализации заявляемого устройства его основными элементами могут являться радиолокационная станция «JMA -2044», устройство аналого-цифрового преобразования «Ла-н20-12РС1» и персональный компьютер с аппаратными требованиями не ниже: процессор семейства Intel Core2Duo/AMD Athlon АМ2, 1 Гб оперативной памяти, 10 Гб свободного места на жестком диске, программный продукт, построенный на платформе Win32, совместим с операционными системами Windows 98/2000/ХР (Хоменко Д.Б. Использование программно-аппаратных средств в обработке радиолокационной информации. Сборник докладов 58-й научно-технической конференции «МОЛОДЕЖЬ-НАУКА-ИННОВАЦИИ», 24-26 ноября 2010 г.в 2 т. - Владивосток: Мор. гос. ун-т, 2010. - Т.1. с 23-26).
Устройство используют следующим образом: включают радиолокационную станцию в работу, запускающие импульсы ее синхронизатора 2 с периодом следования или повторения Ти поступают одновременно (либо с постоянной задержкой) на вход модулятора передатчика 4 и первый вход индикатора 8. Импульсный модулятор передатчика вырабатывает модулирующие видеоимпульсы длительностью τи, воздействующие на генератор сверхвысокой частоты 5, который генерирует радиоимпульсы, длительностью, равной примерно длительности модулирующих импульсов. Радиоимпульсы генератора сверхвысокой частоты через антенный переключатель 6 поступают в антенну 9 и излучаются, выполняя функцию зондирующих сигналов. Через интервал времени tD на входе приемника 7 возникают отраженные сигналы, которые в нем усиливаются и детектируются. В результате детектирования на первом выходе приемника создаются видеоимпульсы, которые через второй вход подаются на управляющий электрод индикатора 8.
Существенно, что второй выход приемника 7 соединен с первым входом аналогового канала аналого-цифрового преобразователя 11 (хв - видеоимпульс), первый выход блока передачи данных углового положения антенны 10 соединен со вторым входом - входом синхронных цифровых данных (хн - импульс начала отсчета курсового угла антенны), а третий выход синхронизатора 2 соединен с третьим входом - входом внешней синхронизации преобразователя 11 (хс - импульс синхронизации).
После преобразования видеоимпульса, поступающего со второго выхода приемника 7, с учетом данных, поступающих с первого выхода блока передачи данных углового положения антенны 10 на второй вход синхронных цифровых данных устройства аналого-цифрового преобразования 11 и третьего выхода синхронизатора 2 на третий вход внешней синхронизации преобразователя 11, с помощью последнего в цифровую форму, данные поступают в вычислительное устройство 12. После анализа данных за несколько полных оборотов антенны в вычислительном устройстве 12 отображается информация о состоянии морского волнения. Весь процесс происходит в автоматическом режиме и не требует участия пользователя. Этим достигается простота и удобство в использовании.
Испытание опытного образца заявляемого устройства для определения состояния морской поверхности показало эффективность его использования при достижении поставленных технических задач, а именно: упрощение конструктивного исполнения устройства, повышение точности измерения характеристик морского волнения, автоматизация процесса анализа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОСНОВНЫХ ПАРАМЕТРОВ ОКРУЖАЮЩЕЙ СРЕДЫ ПРИ ДВИЖЕНИИ МОРСКОГО СУДНА | 2017 |
|
RU2670247C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| Устройство для измерения показателя преломления атмосферы в интересах радиолокации с использованием преобразователя Гильберта | 2023 |
|
RU2804460C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ | 1990 |
|
RU2018875C1 |
Изобретение относится к измерительной технике и предназначено для определения состояния морской поверхности. Устройство содержит радиолокационную станцию, включающую антенну, синхронизатор, датчик углового положения антенны, который соединен механической связью с основанием антенны, электронный ключ, индикатор, а также приемник и передатчик. При этом выход синхронизатора соединен со входом передатчика, а выход передатчика соединен со входом электронного ключа. Устройство дополнительно снабжено аналого-цифровым преобразователем и соединенным с ним на выходе вычислительным устройством. Передатчик радиолокационной станции содержит модулятор и генератор сверхвысокой частоты, вход которого соединен с выходом модулятора. При этом второй выход синхронизатора соединен со входом индикатора, первый выход синхронизатора соединен со входом модулятора передатчика, а его генератор сверхвысокой частоты соединен на выходе со входом электронного ключа, выход которого соединен со входом приемника, а выход приемника соединен со вторым входом индикатора. Второй выход приемника соединен со входом аналогового канала аналого-цифрового преобразователя, второй вход которого - вход синхронных цифровых данных - соединен с выходом датчика углового положения антенны, второй выход которого соединен с третьим входом индикатора, а третий вход аналого-цифрового преобразователя - вход внешней синхронизации - соединен с третьим выходом синхронизатора, а антенна электрически связана с электронным ключом. Технический результат: упрощение, повышение точности измерений характеристик волнения. 1 з.п. ф-лы, 1 ил.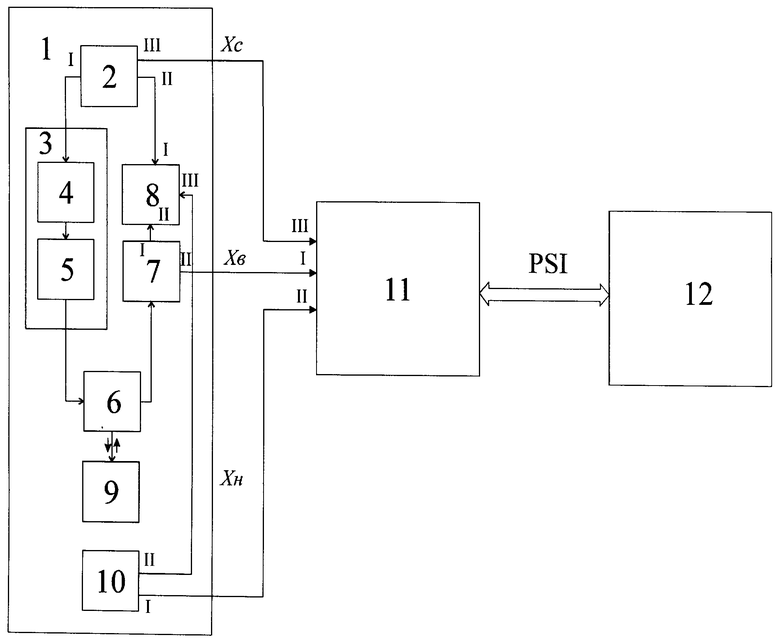
1. Устройство для определения состояния морской поверхности, содержащее радиолокационную станцию, включающую антенну, синхронизатор, датчик углового положения антенны, который соединен механической связью с основанием антенны, электронный ключ, индикатор, а также приемник и передатчик, при этом выход синхронизатора соединен со входом передатчика, а выход передатчика соединен со входом электронного ключа, отличающееся тем, что оно дополнительно содержит аналого-цифровой преобразователь и соединенное с ним на выходе вычислительное устройство; передатчик радиолокационной станции дополнительно содержит модулятор и генератор сверхвысокой частоты, вход которого соединен с выходом модулятора; при этом второй выход синхронизатора соединен со входом индикатора, упомянутый первый выход синхронизатора соединен со входом модулятора передатчика, а его генератор сверхвысокой частоты соединен на выходе со входом электронного ключа, выход которого соединен со входом приемника, а выход приемника соединен со вторым входом индикатора, второй выход приемника соединен со входом аналогового канала аналого-цифрового преобразователя, второй вход которого - вход синхронных цифровых данных соединен с выходом датчика углового положения антенны, второй выход которого соединен с третьим входом индикатора, а третий вход аналого-цифрового преобразователя - вход внешней синхронизации соединен с третьим выходом синхронизатора, а антенна электрически связана с электронным ключом.
2. Устройство для определения состояния морской поверхности по п.1, отличающееся тем, что вычислительное устройство выполнено в виде персонального компьютера.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПОВЕРХНОСТНОГО ВОЛНЕНИЯ | 1990 |
|
RU2018873C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ | 1990 |
|
RU2018875C1 |
| АВТОМАТИЗИРОВАННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ШТОРМООПОВЕЩЕНИЯ И АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2008 |
|
RU2395819C2 |
| Приспособление к трепальным и т.п. маши нам для увлажнения холстов | 1941 |
|
SU65242A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1950 |
|
SU90572A1 |
| Устройство для перемещения и блочного монтажа оборудования | 1980 |
|
SU953155A1 |
| US 7728762 B2, 01.06.2010 | |||
| US 7796082 B2, 14.09.2010. | |||

