Изобретение относится к области неконтактных океанографических измерений, а более конкретно к измерению параметров волнения посредством устройств, представляющих собой радиотехнические неконтактные измерители.
Известно устройство, которое содержит приемник и передатчик когерентной РЛС, стробирующее устройство, схему получения доплеровской частоты, частотомер, запоминающее устройство, корректирующий фильтр и спектроанализатор, принцип работы которого заключается в облучении морской поверхности электромагнитными волнами, приеме отраженных сигналов, выделении сигнала с заданной фиксированной дальностью, измерении доплеровской частоты, преобразовании доплеровской частоты в напряжение, фиксировании этого напряжения в запоминающем устройстве, которое далее через корректирующий фильтр подается на спектроанализатор [1].
Существенным недостатком данных устройств является длительный период измерения, порядка 20 минут, что может оказаться недопустимым для оперативного получения данных о волнении, а также необходимость фиксации облучаемой площади моря позволяет реально применять эти устройства только с вертолетов либо других летательных аппаратов, имеющих режим висения. Точность измерения данных устройств невелика, что требует выполнения нескольких серий измерения.
Известно также устройство, описанное в [2] и состоящее из антенны, приемопередатчика, блока измерения высоты, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, вычислителя, устройства для определения направления прихода волн, схемы определения флуктуационной составляющей скорости, вычислителя угла встречи с волной, позволяющее оперативно измерять параметры волнения не только с летательных аппаратов, имеющих режим висения, но и с борта любых подвижных морских объектов. Данное устройство выгодно отличается от аналогов, однако оно измеряет относительную высоту, определяемую разностью текущей высоты борта и возвышения профиля волны, что существенно препятствует достижению точности измерения параметров волнения. На точность измерения данного устройства оказывают влияние внешние возмущения, вызываемые качкой судна.
Из известных аналогов по своей сути наиболее близкими к заявляемому объекту являются устройства, описанные в [3, 4, 5]. В известных устройствах [3, 5] обеспечивается полный набор спектральных составляющих измеряемых параметров в наиболее очищенном от помех виде, что обеспечивает высокую точность и безынерционность измерений. Устройство [3] состоит из антенны, приемопередатчика, блока измерения высоты, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, вычислителя, устройства для определения направления прихода волн, схемы определения флуктуационной составляющей скорости, вычислителя угла встречи с волной, измерительного модуля и блока коррекции.
Данное устройство выгодно отличается от аналогов, однако оно измеряет параметры волнения в непосредственной близости от борта носителя аппаратуры (судна, морских платформ и других гидротехнических сооружений), что позволяет рассматривать его как устройство оперативного измерения параметров волнения ограниченного радиуса действия.
Известно также устройство для измерения параметров морского волнения [4], которое содержит антенну, антенный переключатель, первый коммутатор, приемник, второй коммутатор, первый детектор огибающей отраженного сигнала, первый фильтр нижних частот, второй делитель напряжения, второй детектор огибающей отраженного сигнала, пятый фильтр нижних частот, блок автоматической регулировки усиления, центрирующий блок, компаратор нулевого уровня, преобразователь период-напряжение, второй фильтр нижних частот, первый умножитель, первый индикатор, первый квадратор, третий фильтр нижних частот, функциональный преобразователь, реализующий функцию у=х0,5, сумматор, второй умножитель, четвертый фильтр нижних частот, первый делитель напряжения, второй квадратор, третий умножитель, второй индикатор, передатчик, формирователь коротких радиоимпульсов и синхронизатор.
Данный состав блоков измерения и обработки сигналов обеспечивает достижение технического результата, заключающегося в увеличении верхнего предела измерения. Однако для практической реализации известного устройства необходимо правильно выбрать и поддерживать на заданном уровне соотношение величин Н0 (высота антенны над водной поверхностью) и τк (длительность зондирующего импульса), что при интенсивном воздействии внешних факторов (гидрометеорологических) выполнить очень сложно. Кроме того, высота волн определяется на основании функциональной зависимости как отношение параметра шероховатости водной поверхности к высоте волны, что при малом времени усреднения может вносить дополнительную погрешность, так как изменение параметра шероховатости возможно в широких пределах при изменениях глубин на исследуемой акватории, наличии поверхностного ветрового течения, изменении скорости орбитального течения. Для определения направления движения волн необходимо выполнять зондирование водной поверхности под разными курсовыми углами.
Общими недостатками известных устройств неконтактного измерения параметров волнения является то, что при анализе зарегистрированных сигналов выполняют только пространственный или только временной анализ (Коняев К.В., Розенберг А.Д. Радиолокационные наблюдения ветровых волн в море // Известия АН СССР. Сер. Физика атмосферы и океана. М., 1978, т.18, №2, с.211), что может вносить дополнительную погрешность в измерения, так как зависимость интенсивности принимаемых сигналов от углов наклона поверхности нелинейна и накладывается на ряд других зависимостей - от интенсивности ряби, которая меняется в пределах длинной волны, от присутствия пены и брызг и др. Существенным недостатком также является неучет орбитального движения отражающих частиц водной поверхности. Известно (Перепелицын О.В., Чернявец В.В. Исследование поверхностного ветрового течения в море // Известия АН СССР. Сер. Физика атмосферы и океана. М., 1978, т.18, №2, с.217), что основное влияние на смещение частоты отраженного сигнала относительно расчетной величины оказывает орбитальное движение отражающих частиц водной поверхности. При волновом движении частицы воды в глубоком море при установившемся волнении движутся по орбитам, близким к окружностям. Эти окружности лежат в плоскостях, перпендикулярных гребням волн. Скорость движения частицы по орбите Vорб при периоде волны Тв и ее высоте Нв равна Vopб=πНв/Тв. Орбитальное движение частиц приводит к частотной модуляции отраженного сигнала и к расширению спектра, если отражение от различных участков волны одинаково. При этом отражение максимально от участков волны, расположенных в районе ее гребня. При большом волнении гребни ломаются, появляются брызги, пена, что также может привести к увеличению уровня сигнала, отраженного от участков вблизи гребней. Так как отражение от этих участков преобладает, то частота отраженного сигнала смещается на величину, близкую к соответствующим значениям орбитальной скорости, как это имеет место при наличии течения. Скорость орбитального течения зависит от скорости ветра, возрастая с ее увеличением. Это рассуждение справедливо при измерениях параметров волнения при расположении аппаратуры измерения и регистрации сигналов на больших высотах по отношению к водной поверхности, как это реализовано в известном устройстве [4]. При этом облучаемая антенной площадка значительно больше длины морской волны, а мощность отраженного сигнала определяется в основном участками, расположенными в районе гребней морских волн, т.е. частота отраженного сигнала смещается на величину, соответствующую орбитальной скорости не гребне волны. При малой высоте установки антенны (в условиях судна), когда облучаемая антенной площадка значительно меньше длины морской волны, влияние движения морских волн на работу аппаратуры существенно меняется. Величина смещения доплеровского спектра в этом случае будет определяться скоростью поверхностного течения.
Задачей настоящего изобретения является повышение достоверности измерения параметров волнения с движущегося объекта.
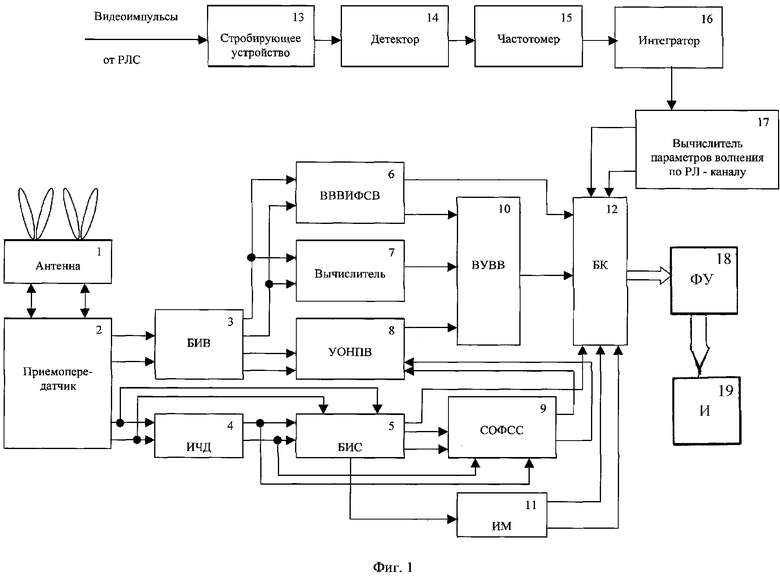
Поставленная задача достигается тем, что в устройство, состоящее из антенны, приемопередатчика, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, вычислителя временных интервалов, схемы определения флуктуационной составляющей скорости, устройства для определения направления волн, вычислителя угла встречи с волной, инерциального модуля, блока коррекции, функционального устройства и индикатора, в котором антенна входом и выходом соединена с входом и выходом приемопередатчика, который двумя выходами соединен с двумя входами блока измерения высоты, который двумя выходами соединен вычислителем временных интервалов и этими же выходами соединен с двумя входами вычислителя высоты волн и фазовой скорости волн и еще двумя выходами соединен с устройством для определения направления прихода волн, выход которого соединен со входом вычислителя угла встречи с волной, два других входа которого соединены соответственно с выходами вычислителя временных интервалов, вычислителя высоты волн и фазовой скорости волн, и еще два входа устройства для определения направления прихода волн соединены с двумя выходами схемы определения флуктуационной составляющей скорости, которая двумя входами соединена с двумя выходами блока измерения скорости и еще двумя входами соединена с двумя выходами измерителя доплеровской частоты, который этими же выходами соединен с двумя входами блока измерения скорости, а измеритель частоты Доплера двумя входами соединен с еще двумя выходами передатчика, а блок коррекции своими входами соответственно соединен с выходами вычислителя высоты волн и фазовой скорости волн, вычислителя угла встречи с волной, блока измерения скорости и двумя выходами инерциального модуля, который входом соединен с выходом блока измерения скорости, который еще двумя входами соединен с теми же выходами приемопередатчика, что и измеритель частоты Доплера, дополнительно введены стробирующее устройство, детектор, частотомер, интегратор, вычислитель параметров волнения по радиолокационному каналу, два выхода которого соединены с еще двумя входами блока коррекции, а вход соединен с выходом интегратора, вход которого соединен с выходом частотомера, вход которого соединен с выходом детектора, вход которого соединен с выходом стробирующего устройства, на вход которого подаются видеоимпульсы от судовой некогерентной радиолокационной станции, вычислитель временных интервалов еще одним выходом соединен с еще одним входом устройства определения направления волн, индикатор своим входом соединен с выходом функционального устройства, который своим входом соединен с выходом блока коррекции, а антенна снабжена сканирующим устройством.
Совокупность новых признаков, а именно ввод в известное устройство стробирующего устройства, детектора, частотомера, интегратора, вычислителя параметров волнения по радиолокационному каналу, два выхода которого соединены с еще двумя входами блока коррекции, а вход соединен с выходом интегратора, вход которого соединен с выходом частотомера, вход которого соединен с выходом детектора, вход которого соединен с выходом стробирующего устройства, на вход которого подаются видеоимпульсы от некогерентной радиолокационной станции, а измеритель временных интервалов еще одним выходом соединен с еще одним входом устройства определения направления волн, снабжение антенны сканирующим устройством из известного уровня техники не выявлено, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Блок-схема предлагаемого устройства представлена на чертеже (фиг.1), которое содержит антенну 1, приемопередатчик 2, блок измерения высоты 3, измеритель частоты Доплера 4, блок измерения скорости 5, вычислитель высоты волн и фазовой скорости волн 6, измеритель временных интервалов 7, устройство для определения направления прихода волн 8, схему определения флуктуационной составляющей скорости 9, вычислитель угла встречи с волной 10, инерциальный модуль 11, блок коррекции 12, стробирующее устройство 13, детектор 14, частотомер 15, интегратор 16, вычислитель параметров волнения по радиолокационному каналу 17, функциональное устройство 18, индикатор 19.
Антенна 1 представляет собой волноводно-щелевую антенну с рабочим раскрывом 325×310 мм, образованную 29-ю излучающими волноводами с наклонными щелями на узкой стенке. Питание излучающих волноводов осуществляется по двум поперечными волноводам со щелями и обеспечивает получение с одного раскрыва четырех лучей излучения с шириной диаграммы направленности 4,5°. Антенна также включает волноводный тракт с циркулятором, элементы нагрузки и снабжена сканирующим устройством, представляющим собой подвижную раму в секторе от 0 до 45 градусов. Подвижная рама приводится в движение посредством электропривода с редуктором.
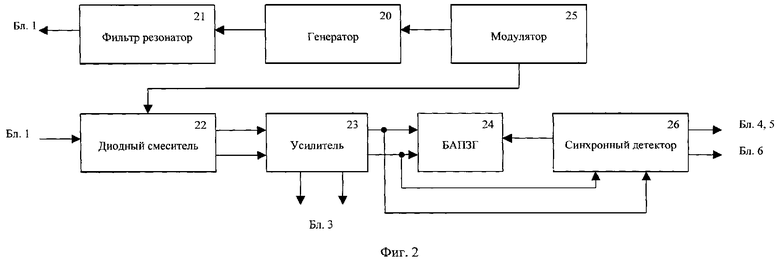
В качестве антенны 1 возможно также применение рупорной антенны (см., например, Колчинский В.Е., Константиновский М.И., Мандуровский А.И. Доплеровские устройства и системы навигации. М., Советское радио, 1985 г.). Приемопередатчик 2 (фиг.2) состоит из генератора сверхвысокой частоты 20, фильтра-резонатора 21, диодного смесителя 22, усилителя 23, блока автоматической подстройки зоны генератора 24, модулятора 25, синхронного детектора 26.
Блок измерения высоты 3 (фиг.3) состоит из схемы установки начальной высоты 27, интегратора 28 и преобразователя «напряжение-код» 29.
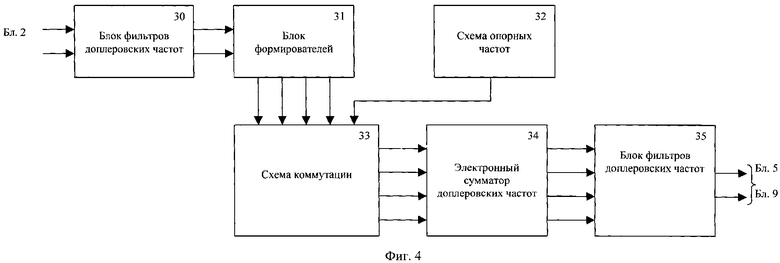
Измеритель частоты Доплера (фиг.4) состоит из блока фильтров доплеровских частот 30, блока формирователей 31, схемы опорных частот 32, схемы коммутации 33, электронного сумматора доплеровских частот 34, блока выходных делителей 35.
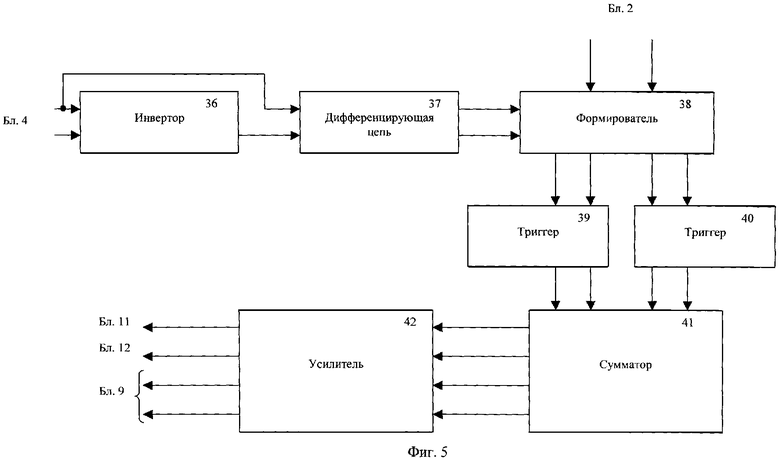
Блок измерения скорости (фиг.5) состоит из инвертора 36, дифференцирующей цепи 37, формирователя 38, двух триггеров 39, 40, сумматора 41, усилителя 42.
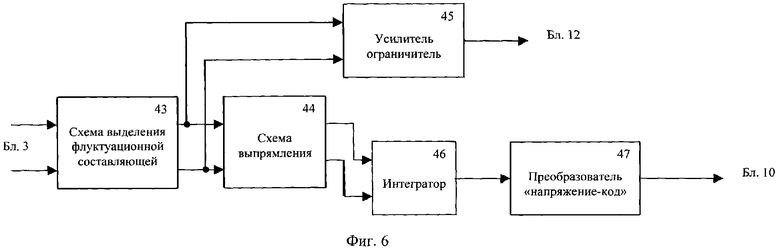
Вычислитель высоты волн и фазовой скорости волн (фиг.6) состоит из схемы выделения флуктуационной составляющей 43, схемы выпрямления 44, усилителя-ограничителя 45, интегратора 46, преобразователя «напряжение-код» 47.
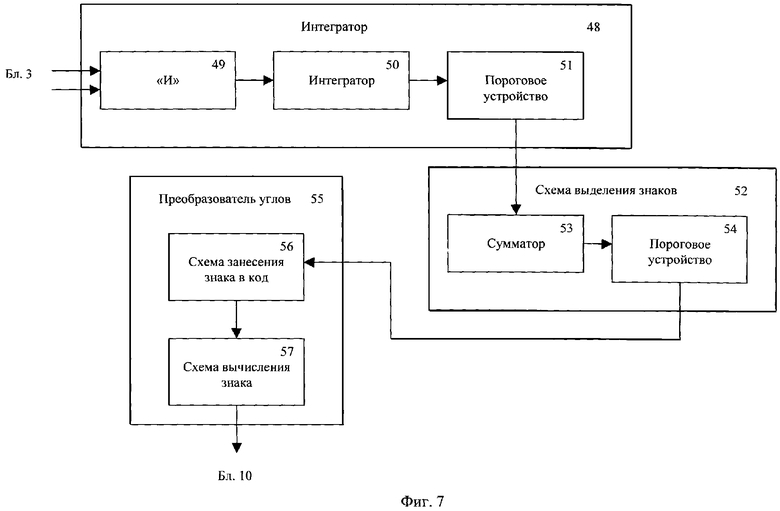
Вычислитель временных интервалов 7 (фиг.7) состоит из интегратора 48, включающего схему «И» 49, интегратор 50, пороговое устройство 51, схемы выделения знаков 52, включающей сумматор 53, пороговое устройство 54, и преобразователя углов 55, включающего схему занесения знака в код 56 и схему вычисления знака 57.
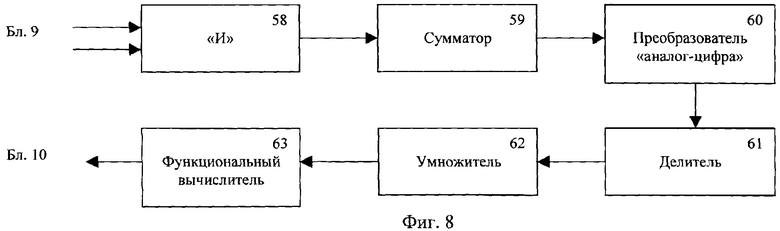
Устройство для определения направления прихода волн 8 (фиг.8) состоит из схемы «И» 58, сумматора 59, преобразователя аналог-цифра 60, делителя 61, умножителя 62, функционального вычислителя 63.
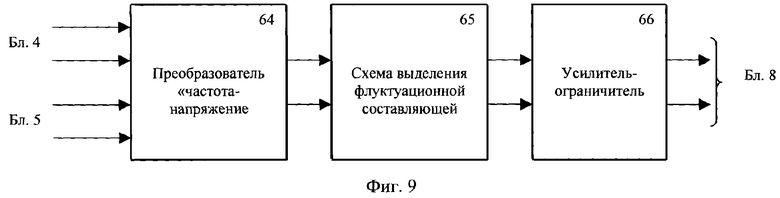
Схема определения флуктуационной составляющей скорости 9 (фиг.9) состоит из преобразователя «частота-напряжение» 64 схемы выделения флуктуационной составляющей 65, усилителя-ограничителя 66.
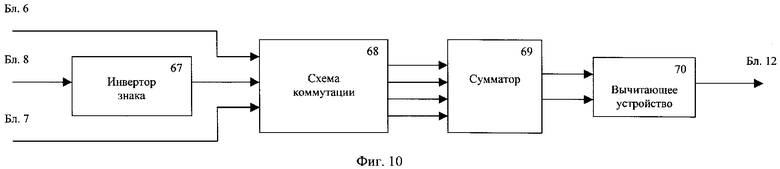
Вычислитель угла встречи с волной 10 (фиг.10) состоит из инвертора знака 67, схемы коммутации 68, сумматора 69, вычитающего устройства 70.
Аналогами блоков 1-10 являются устройства, описанные в книге: Колчинский В.Е., Константиновкий М.И., Мандуровский И.А. Доплеровские устройства и системы навигации. М., Советское радио, 1975, а также в авторских свидетельствах №296711, №198466, №326577.
Инерциальный модуль 11 состоит из инерциального блока и аналого-цифрового преобразователя.
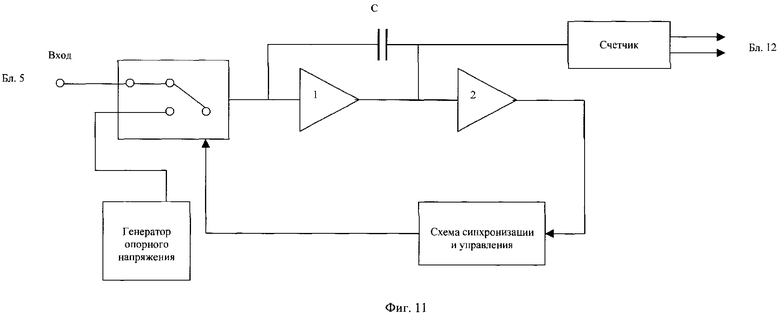
Аналого-цифровой преобразователь (фиг.11) представляет собой интегрирующий преобразователь, в котором такты интегрирования регулирует схема синхронизации и управления, связанная с выходом второго компаратора. В первом такте входной сигнал (верхнее положение переключателя) интегрируется в течение фиксированного интервала времени, определяемого схемой синхронизации и управления. Во втором такте (нижнее положение переключателя) на вход интегратора подается сигнал опорного напряжения. Время интегрирования во втором такте переменно и определяется моментом равенства нулю выходного напряжения интегратора. Аналоги описаны в кн.: Ю.М.Смирнов, Г.И.Воробьев. Специализированные ЭВМ. М., Высшая школа, 1989. - 144 с., с.72-87.
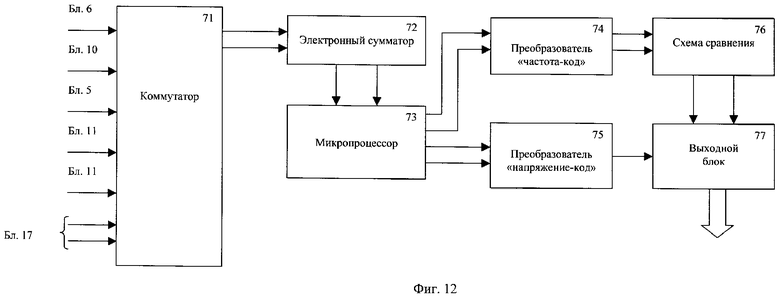
Блок коррекции 12 (фиг.12) состоит из коммутатора 71, электронного сумматора 72, микропроцессора 73, преобразователя "частота-код" 74, преобразователя «напряжение-код» 75, схемы сравнения выходного блока 76, выходного блока 77, α-БИХ фильтра 78.
Микропроцессор 73 собран на базе комплекта БИС К1804 (см. например, комплект БИС К1804 в процессорах и контроллерах. /В.М.Мещеряков, И.Е.Лобов, С.С.Глебов и др. - Под ред. В.Б.Смолова/ М.: Радио и связь, 1990. - 256 с.).
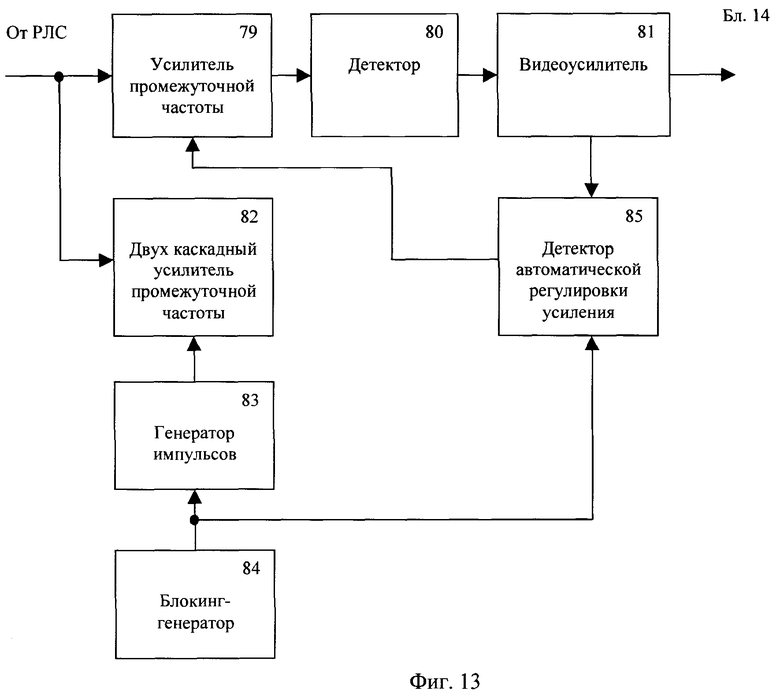
Стробирующее устройство 13 (фиг.13) состоит из усилителя промежуточной частоты 79, детектора 80, видеоусилителя 81, двухкаскадного усилителя промежуточной частоты 82, генератора импульсов 83, блокинг-генератора 84, детектора автоматической регулировки усиления 85. Аналоги описаны в кн.: А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. М.: Советское радио, 1970. - 392 с., с.112-121.
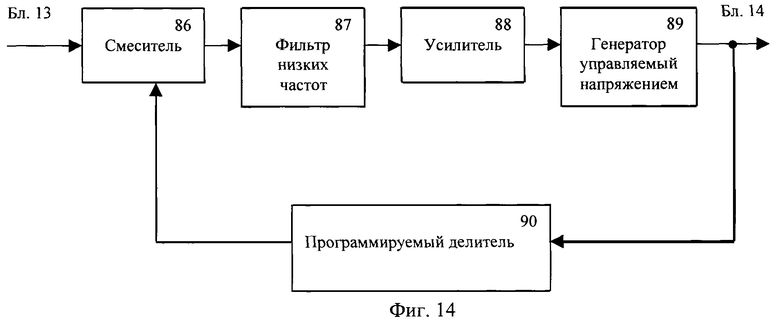
Детектор 14 (фиг.14) состоит из смесителя 86, фильтра низких частот 87, усилителя 88, генератора управляемого напряжением 89, программного делителя 90. Аналоги описаны в кн.: Ф.Мейзда. Интегральные схемы. М.: Мир, 1981. - 280 с., с.263-265.
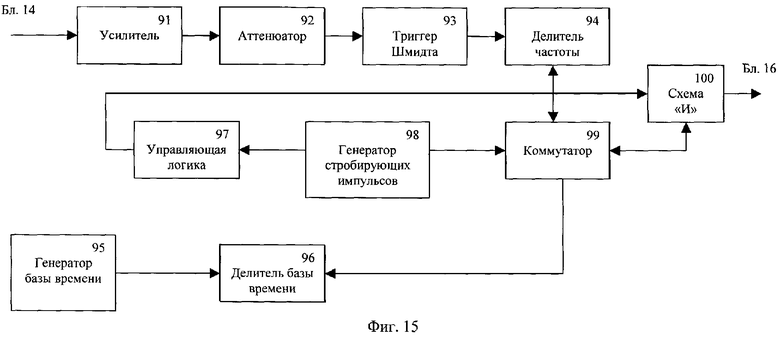
Частотомер 15 (фиг.15) состоит из усилителя 91, аттенюатора 92, триггера Шмитта 93, делителя частоты 94, генератора базы времени 95, делителя базы времени 96, управляющей логики 97, генератора стробирующих импульсов 98, коммутатора 99, схемы «И» 100. Аналоги описаны в кн.: М.М.Фолкенберри. Справочное пособие по ремонту электрических и электронных систем. М.: Энергоатомиздат, 1989. - 416 с., с.32-33.
Интегратор 16 построен на БИС серии КА1808. Аналог описан в кн.: С.Т.Хвощ, Н.Н.Варминский, Е.А.Павлов. Микропроцессоры и микроЭВМ в системах автоматического управления. Л.: Машиностроение, 1987. - 640 с., с.383-387.
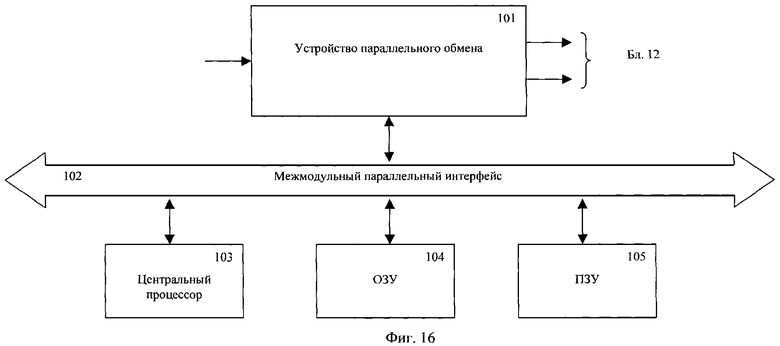
Вычислитель параметров волнения по радиолокационному каналу 17 (фиг.16) состоит из устройства параллельного обмена 101, межмодульного параллельного интерфейса 102, центрального процессора 103, ОЗУ 104, ПЗУ 105 и собран на базе микропроцессорного комплекта серии КР537 и КР588. Аналоги описаны в источниках:
1) Центральный процессор М2. Техническое описание и инструкция по эксплуатации. М.: ЦНИИ «Электроника», 1982. - 220 с.
2) Черняковский Д.Н., Шиллер В.А., Юровский А.А. Процессор с системой команд и интерфейсом микроЭВМ «Электроника 60» на основе БИС серии КР588 // Электронная промышленность. - 1983. - №9, с.11-13.
3) Модуль ОЗУ с унифицированным интерфейсом на основе БИС серия КР588 / Е.В.Коннов, С.И.Тихомиров, Д.Н.Черняковский и др. // Электронная промышленность. - 1983, №9. - с.14-17.
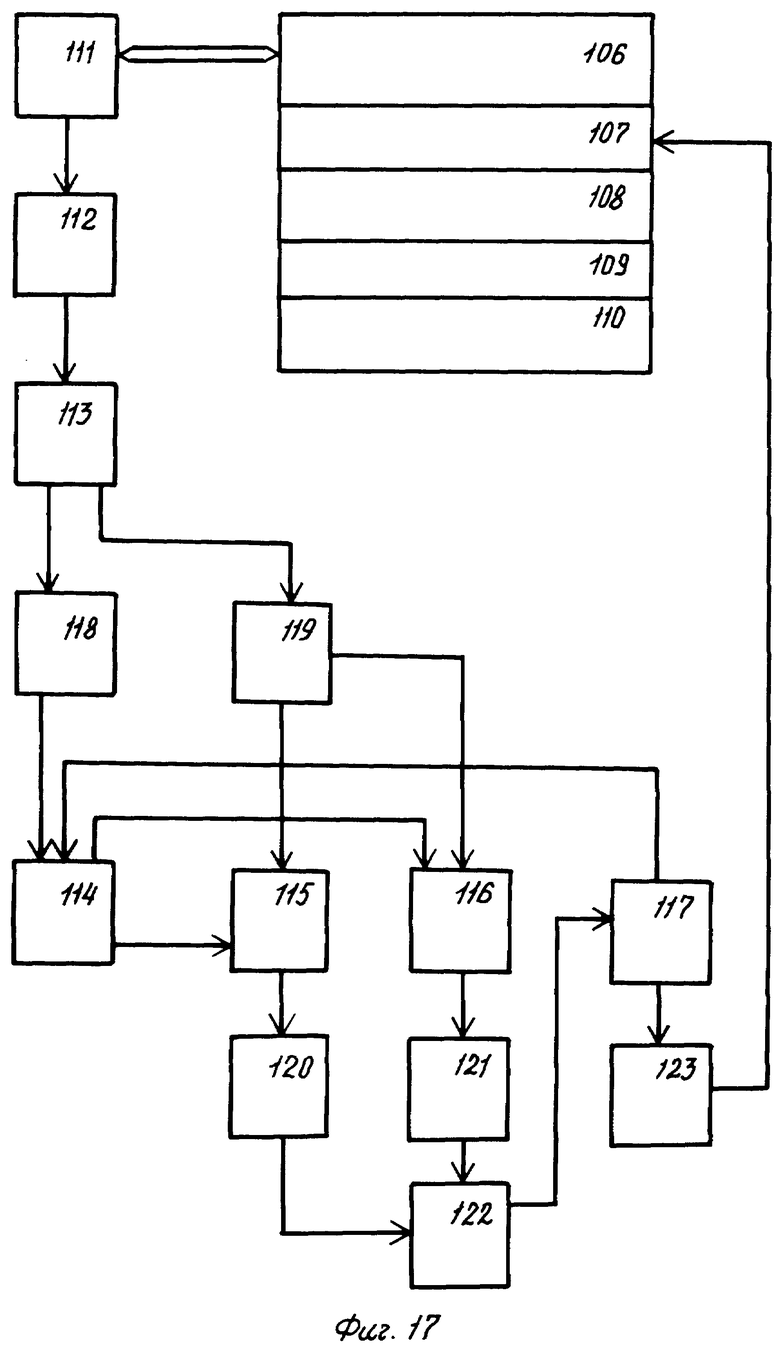
Фиг.17. Функциональное устройство 18 включает вычислительный блок, состоящий из ЭВМ 106, процессора - классификатора 107, процессора редактора 108, метрологического процессора 109, интеллектуального процессора ПО, автоматического корреляционного устройства, состоящего из блока регулируемой задержки 111, множительного устройства 112, интегратора 113, регистра сдвига 114, схем совпадения 115 и 116, управляемого генератора тактовых (продвигающих) импульсов 117, усилителей ограничителей 118 и 119, интеграторов 120 и 121, вычитающего устройства 122, вычислительного блока 123. Блоки 112, 113, 114, 115, 116, 117, 118, 119, 120 и 121 образуют следящую систему.
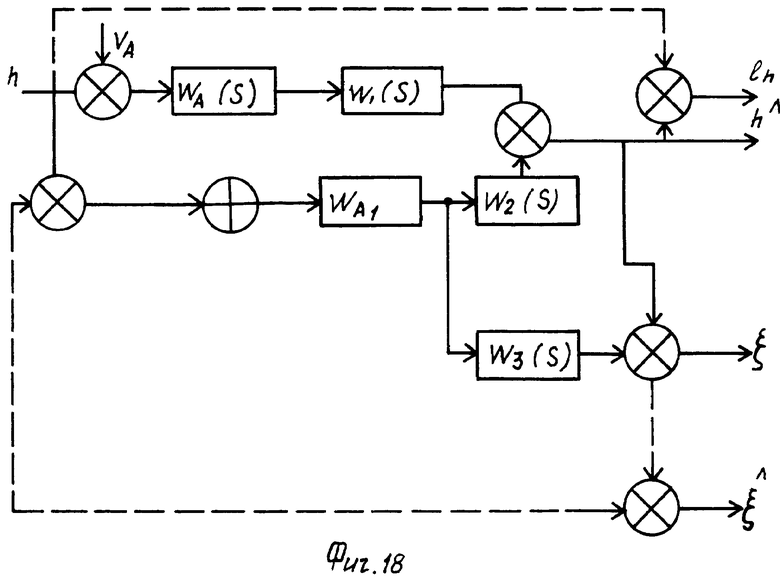
Фиг.18. Вид передаточных функций, решаемых блоком 12.
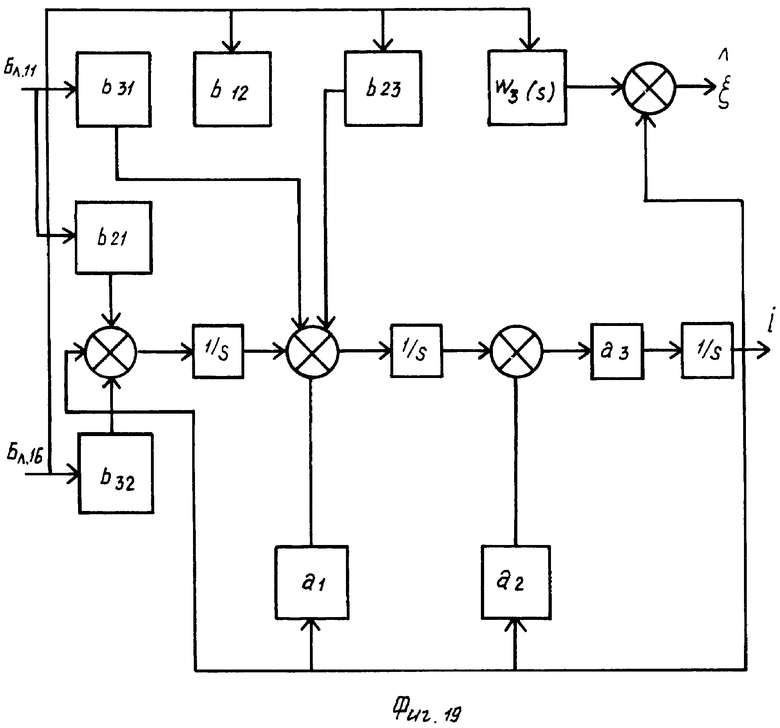
Фиг.19. Структурная схема, поясняющая решение задачи очищения сигналов от помех, вызванных шумами измерения, где обозначены: h(t) и ζ(t) - измеряемые абсолютная высота антенны над водной поверхностью и высота профиля волн; h'(t) и ζ'(t) - оценки этих величин; l1(t)=h(t)-h'(t) и l2(t)=ζ(t)-ζ'(t) - ошибки измерений; V01(t) и V02(t) - погрешности измерений бл.2 и бл.11; W1A(S), WA1(S) - известные передаточные функции бл.2 и бл.11; W1,2,3(S) - искомые передаточные функции каналов очищения сигналов в бл.12.
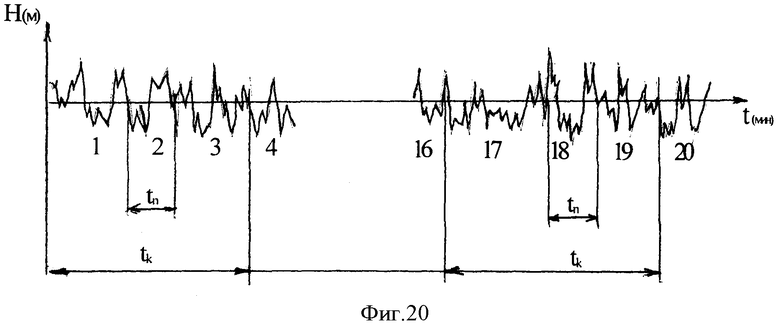
Фиг.20. Алгоритм режима измерения на интервалы для определения средней линии, где Н - высота волн, t - временной интервал.
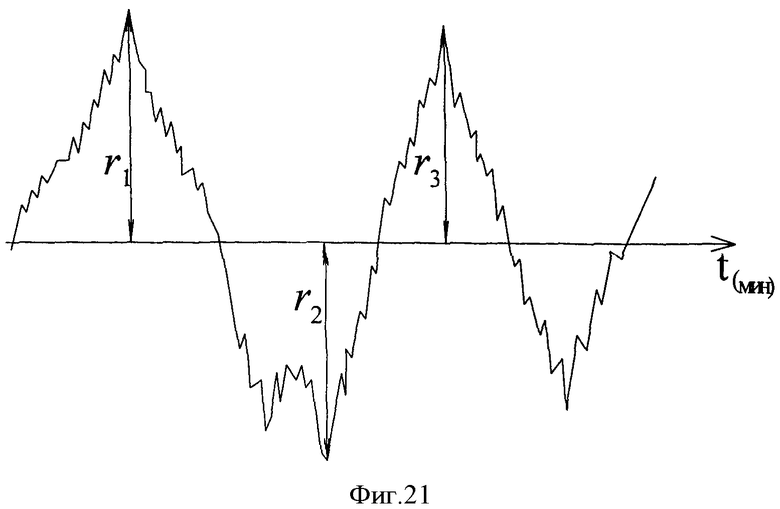
Фиг.21. График определения высот волн, где r1, r2, r3 - высота полупериодов.
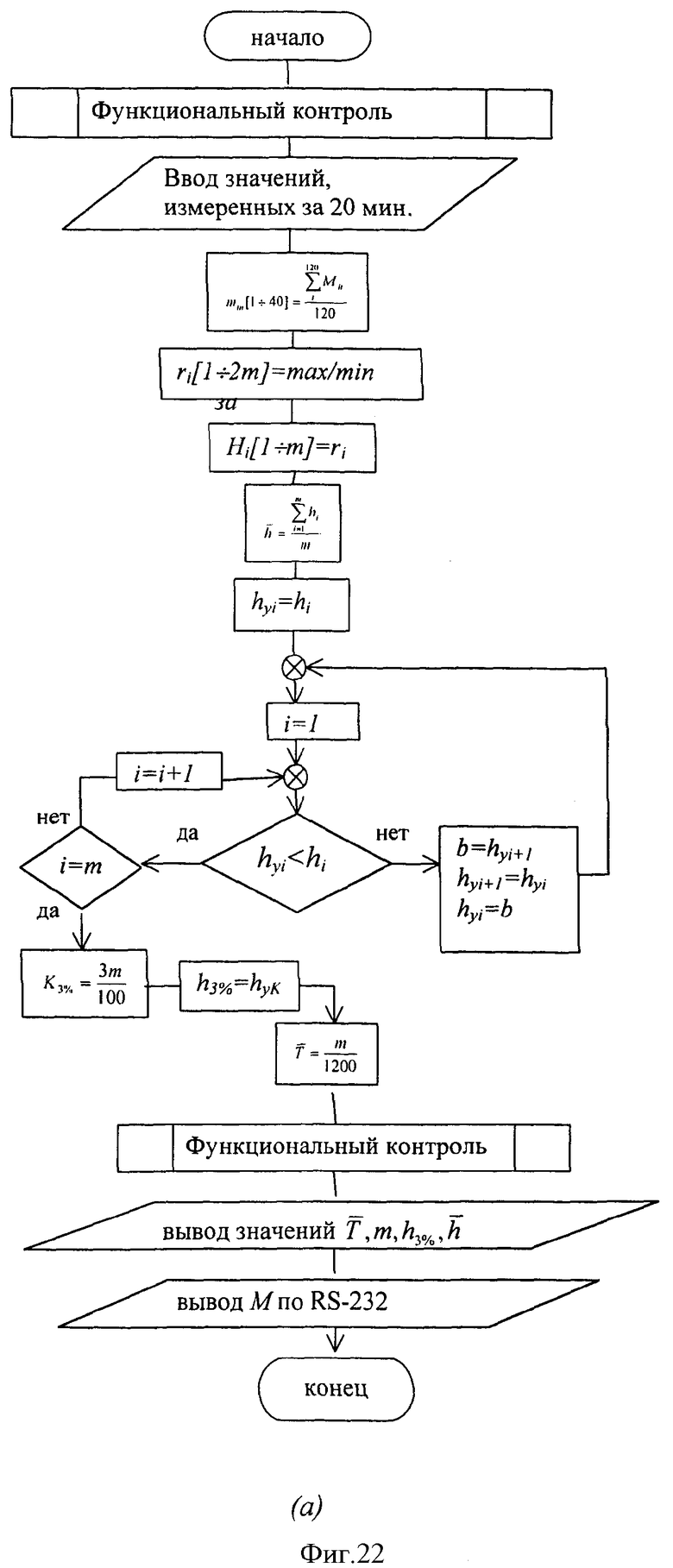
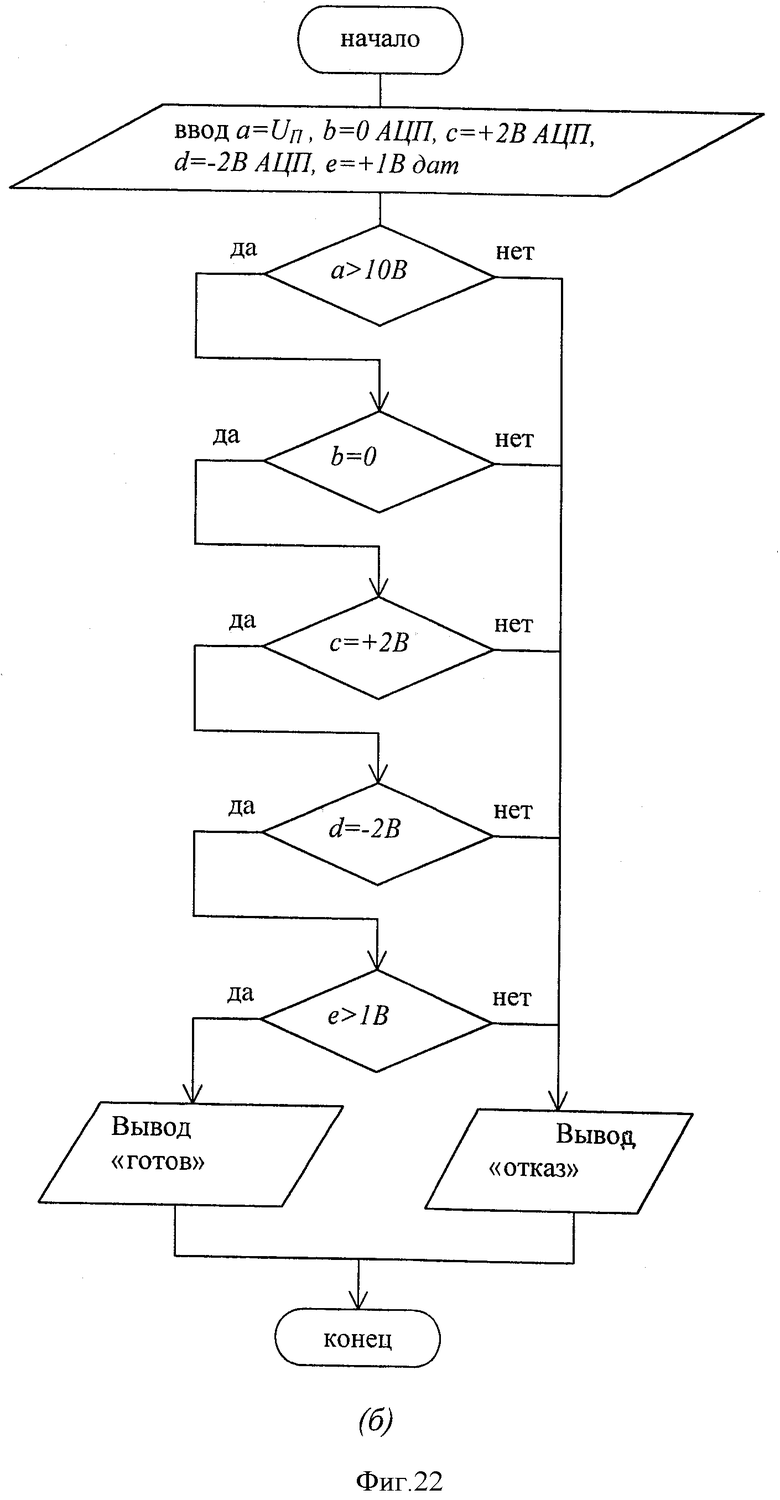
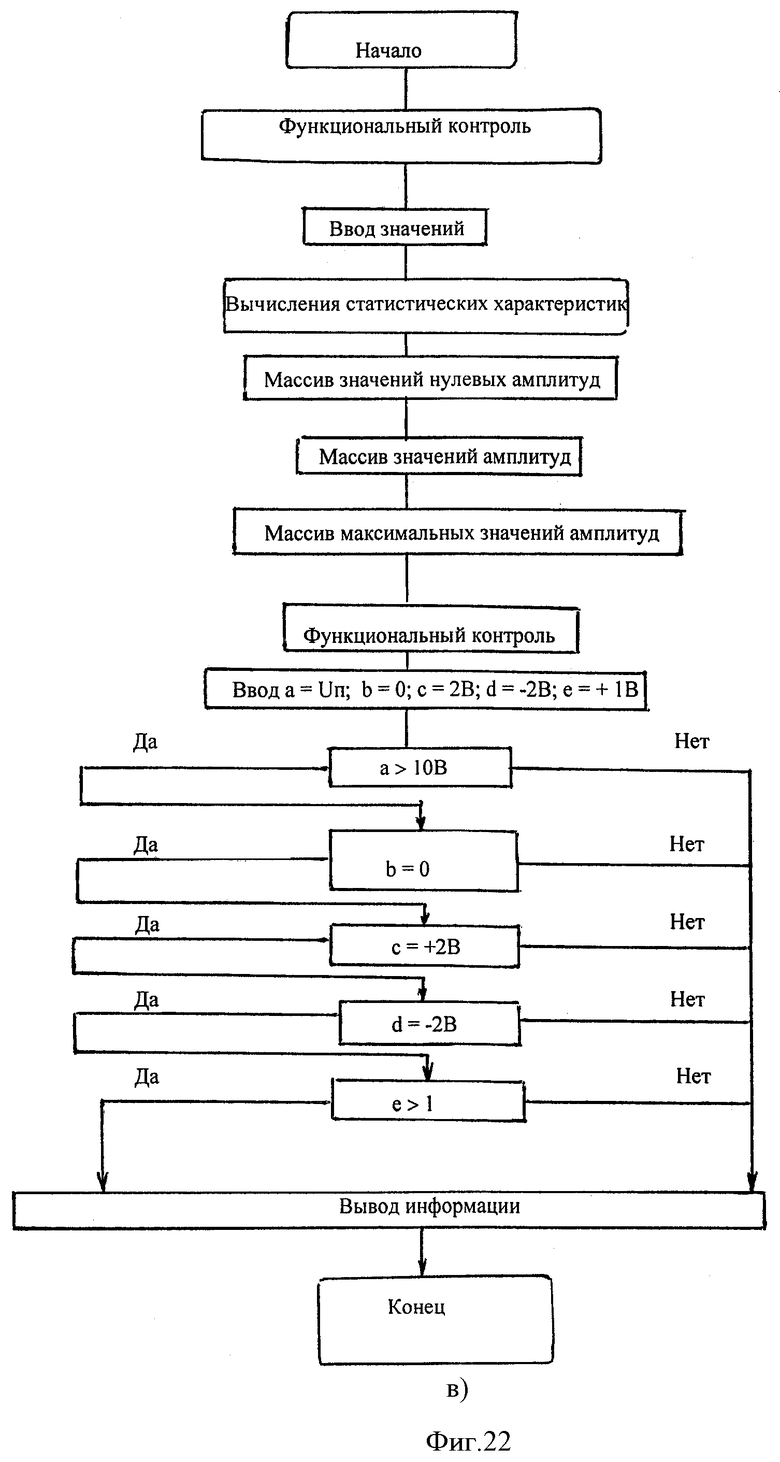
Фиг.22. Алгоритм работы блока 18 при определении высоты волн: а) - алгоритм вычисления статических характеристик; б) - алгоритм подпрограммы функционального контроля, mtn [0÷40] - массив значений нулевых линий; ri [0÷2m] - массив значений амплитуд волн; h [0÷m] - массив высот волн; в) - комплексная обработка амплитуд.
Устройство работает следующим образом. Генератор сверхвысокочастотных колебаний 20 через циркулятор в антенне 1 в режиме вентиля нагружен на фильтр резонатор 21, который служит для автоматической подстройки зоны генератора и температурной стабилизации. Частотная модуляция генератора осуществляется блоком автоматической подстройки зоны генератора 24. Излученный антенной 1 сигнал отражается от подстилающей морской поверхности и после приема этой же антенной через циркулятор направляется на диодный смеситель 22, в качестве которого используется детекторная секция на базе диода Шотки с малыми шумами.
После преобразования с частью излучаемого сигнала, величина которого регулируется специальными винтом, принятый сигнал (первая гармоника) фильтруется и усиливается в блоке 23, частота настройки которого равна частоте модуляции, полоса - удвоенной полосе спектра при максимальной скорости судна. Сигнал с выхода блока 23 поступает на синхронный детектор 26. После синхронного детектирования с модулирующим сигналом выделяется переменное напряжение частотой Доплера.
В приемопередатчике 2 используется режим частотной манипуляции, описанный в книге: Варкапатян А.Г., Коршунов Г.И., Наделяев М.А. и др. Автоматизация контроля параметров водной среды. - Л.: Судостроение, 1988, 232 с.
С блока 2 сигналы подаются на блоки 3 и 4. В блоке 4 обеспечивается выполнение следующих функций:
- фильтрация доплеровских сигналов;
- усиление доплеровских сигналов;
- преобразование формы доплеровских сигналов из синусоидальной формы в прямоугольную.
Фильтры низких частот представляют собой аналоговые активные фильтры, пропускающие полезные сигналы в диапазоне частот от 0 до 6500 Гц. Основные помехи находятся на частоте 20 Гц, на которой работает преобразователь напряжения питания, 75 и 100 кГц - на частотах модуляции СВЧ-сигнала.
Формирователи формы сигнала преобразуют доплеровские сигналы синусоидальной формы, изменяющиеся по амплитуде и частоте в сигналы прямоугольной формы с постоянной амплитудой и постоянной длительность импульса, равной минимальному периоду полезного сигнала. Во время длительного импульса формирователь не чувствителен к входным сигналам. Таким образом, происходит дополнительная фильтрация полезного сигнала от помех, обусловленных вибрацией корпуса приемопередатчика. Данные помехи критичны при малых амплитудах доплеровского сигнала, при слабом отраженном сигнале СВЧ-энергии, т.е. при малом отношении сигнал/шум. Так как во время опорного периода доплеровские сигналы проходят два перехода через нулевое состояние, то частота прямоугольных импульсов на выходе формирователя в два раза выше входного доплеровского сигнала.
Схема опорных частот 32 содержит кварцевый генератор на 200 кГц, распределитель опорных импульсных сигналов, делитель частоты. На делителе частоты формируется опорный временной интервал 0,25 с. Распределитель опорных импульсных сигналов содержит устройства синхронизации в количестве, соответствующем количеству формируемых лучей. Каждое устройство синхронизации представляет из себя логическое триггерное кольцо, предназначенное для синхронизации опорной частоты импульсных последовательностей доплеровского сигнала. Для каждого устройства синхронизации применяется опорная частота, полученная на распределителе опорных сигналов, импульсы которого разнесены во времени. Таким образом, происходит разнесение во времени доплеровских импульсных сигналов от каждого луча.
Сигналы бл.4 поступают на бл.5, где формируются импульсные последовательности с частотами, пропорциональными продольной и поперечной составляющим скорости движения. В качестве входной информации используется также доплеровский сигнал, поступающий из приемопередатчика 2 для определения знака движения. Так как для каждого луча после демодуляции получены два одинаковых доплеровских сигнала со сдвигом фаз между ними, то взяв в качестве опорного сигнала один из них, определяем знак фазы другого сигнала, который характеризует знак направления движения судна.
На бл.3 с бл.2 подается сигнал разностной частоты Fp(t)=f1(t)-f2(t) - мгновенная частота преобразованного сигнала, которая несет информацию о сдвиге τ законов изменения частоты излучаемого f1(t) и принимаемого f2(t) сигналов
где Δf - девиация частоты;
ТΔf - период модуляции.
В бл.3 при измерении высоты движения от антенны до подстилающей поверхности, используется пропорциональная связь ее с разностной частотой H=Δt·FP,
где  - коэффициент пропорциональности.
- коэффициент пропорциональности.
Определение величины Fp с бл.3 сводится к счету числа импульсов (например, положительных полуволн сигнала разностной частоты) за период модуляции.
При излучении попеременно с частотной манипуляцией двух сигналов

где 
 φ1,2 - амплитуда, частота и фаза соответственно.
φ1,2 - амплитуда, частота и фаза соответственно.
Принятые сигналы имеют вид:

где  - доплеровские частоты;
- доплеровские частоты;
K1,2 - волновые числа;
R - наклонная дальность.
Разность фаз удобнее измерять у напряжений, имеющих низкую частоту, например Доплера. Такие сигналы образуются путем смешения принятого сигнала с частью излучаемого:
f1,2(t)=Emcc2·Cos(Ω1,2(t)±2Kl,2R).
При этом разность фаз при К1≺К2 равна

Постоянная составляющая пропорциональна средней дальности до поверхности, а переменная - профилю поверхности. Причем размах переменной составляющей пропорционален высоте волны, т.е. для выделения высоты волны необходимо измерить разность фаз с выделением из результата флуктуационной составляющей, что производится в бл.6.
В вычислителе временных интервалов 7 производится измерение временного интервала (τ) прохождения морской волной последовательно точек пересечения как минимум двух радиолучей с морской поверхностью. По измеренным временным интервалам и по соответствующим профилям взволнованной морской поверхности в точках пересечения в ней радиолучей вычисляется угол встречи судна с волной. В бл.9 производится преобразование напряжения доплеровской частоты в последовательность импульсов с частотой следования, равной частоте Доплера, и согласование этой последовательности, но с переменной постоянной времени, что необходимо для более эффективного согласования флуктуационной частоты Доплера, вызванных случайным характером принятого сигнала, и выделения флуктуаций, вызванных волнением.
Сигналы скорости и высоты подаются в блок 8, где происходит определение угла прихода волны для каждой пары лучей.
Как известно из теории морского волнения, морская взволнованная поверхность может быть представлена в виде суммы систем волн, в простейшем случае в виде суммы крупномасштабной  и мелкомасштабной
и мелкомасштабной  составляющих двумерного волнения
составляющих двумерного волнения  где
где  - радиус-вектор (см., например, Шулейкин В.В. «Физика моря». М.; Наука, 1968).
- радиус-вектор (см., например, Шулейкин В.В. «Физика моря». М.; Наука, 1968).
Поскольку  и при воздействии судна не учитывается, в то же время для измерения параметров волнения
и при воздействии судна не учитывается, в то же время для измерения параметров волнения  используется зависимость:
используется зависимость:
где hW, Ω,  - амплитуда, высота, частота и волновой вектор морской волны.
- амплитуда, высота, частота и волновой вектор морской волны.
где λW - длина морской волны.
Для случая, когда излучаются как минимум три радиолуча, алгоритм измерения угла встречи с волной и, следовательно, направления бега волн может быть получен из следующих соотношений:

где k,  - волновое число СВЧ-излучения и максимальное значение (амплитуда) орбитальной скорости морских волн.
- волновое число СВЧ-излучения и максимальное значение (амплитуда) орбитальной скорости морских волн.



Последнее соотношение справедливо при условии L<<λW и позволяет определить φ в пределах -90° до +90°. Для диапазона -180° до +180° необходимо знание, навстречу или вдогон судну движется волна.
Измерение угла прихода морской волны для любых соотношений величин λW и L проводится путем корреляционной обработки профилей морской поверхности, полученных от нескольких радиолучей в соответствии с зависимостью:
где V - скорость судна, поступающая с бл.5 через бл.9 на бл8;
Vf - фазовая скорость волны, поступающая с бл.9 на бл8;
τ - временной сдвиг профилей в точках отражения радиолучей, поступающий с бл.7.
Перед Vf/Соsφ ставится знак «+», если волна движется навстречу судну, а если направление движения волн совпадает с направлением движения судна, то «-». Вышеприведенная зависимость приводится к виду
что позволяет определить угол φ.
Величина фазовой скорости Vf определяется как функция высоты волны.
Выбор конкретного алгоритма вычисления величины φ обусловлен различным объемом необходимых вычислений и памяти, резко возрастающих при корреляционной обработке для L<<λW.
Направление движения волн определяется для каждого луча, причем это направление определяется относительно вертикальной плоскости, перпендикулярной той вертикальной плоскости, в которой лежит луч.
Так как орбитальное движение частиц воды приводит к доплеровской модуляции частоты принятого сигнала по закону

где а - масштабный коэффициент;
Г0, γ0 - углы ориентации луча в пространстве;
φL - угол между направлением движения волн и вертикальной плоскостью, в которой лежит луч.
Угол Г0 отсчитывается в горизонтальной плоскости от вертикальной плоскости, в которой лежит луч, а угол γ0 отсчитывается от вертикали.
При сравнении фазы модулирующей функции с фазой рельефа  видно, что она отличается от последней на величину -
видно, что она отличается от последней на величину -  зависящую при заданных углах γ0, Г0 (задаются при изготовлении образца) только от направления, определяемого углом φL. При определении направления движения волны важным свойством функции модуляции является то, что составляющая ее фазы arctg[Cos(Г0-φL)tgγ0] меняет знак в зависимости от угла прихода волны по отношению к проекции радиолуча на горизонтальную плоскость. Так, для -90°<(Г0-φL,)<+90° она положительна, а для 90°<(Г0-φL)<180° - отрицательна.
зависящую при заданных углах γ0, Г0 (задаются при изготовлении образца) только от направления, определяемого углом φL. При определении направления движения волны важным свойством функции модуляции является то, что составляющая ее фазы arctg[Cos(Г0-φL)tgγ0] меняет знак в зависимости от угла прихода волны по отношению к проекции радиолуча на горизонтальную плоскость. Так, для -90°<(Г0-φL,)<+90° она положительна, а для 90°<(Г0-φL)<180° - отрицательна.
После определения направления прихода волны для каждого луча этот параметр определяется для всего измерителя путем приведения направлений к диаметральной плоскости судна в бл.10.
Сигналы с бл.6, 7, 8 подаются на бл.10, где полученные углы приводятся к диаметральной плоскости судна.
Бл.11 обеспечивает измерение собственных вертикальных перемещений объекта, сигналы о которых в цифровом виде подаются на бл.12. Инерциальный модуль 11 построен на базе гироазимутгоризонткомпаса и включает датчики относительных угловых скоростей и акселерометры с взаимно-ортогональными осями чувствительности. При этом в качестве датчиков могут быть применены как датчики линейных ускорений в сочетании с магнитным компасом, так и датчики, объединенные в функционально оформленную систему. Например, гировертикаль или инерциальная навигационная система, обеспечивающая выработку таких параметров как курс, углы качки, угловые скорости качки, угловую скорость рыскания, угловых и линейных ускорений.
Так как каналы измерения не являются узкополосными, то на выходе бл.5, 6, 7, 11 сигналы содержат спектральные составляющие, искаженные шумами измерения. Очищение этих сигналов от помех в бл.12 обеспечивается решением передаточных функций (фиг.18 и фиг.19).
На бл.12 также подаются сигналы, пропорциональные элементам морских волн, которые измерены некогерентной судовой радиолокационной станцией (см., например, Красюк Н.П., Розенберг В.И. Корабельная радиолокация и метеорология. Л.: Судостроение, 1970, 327 с.). Видеоимпульсы с РЛС подаются на стробирующее устройство 13, которое обеспечивает получение отраженных сигналов заданной длительности с фиксированной дальности. Детектор 14 выделяет огибающую видеоимпульса, а частотомер 15 измеряет среднюю частоту флуктуации огибающей  В качестве частотомера может быть применен счетчик числа пересечений среднего уровня огибающей (счетчик нулей). Напряжение, пропорциональное среднеквадратичному значению ширины спектра флуктуации огибающей (и средней частоте флуктуации), через интегратор 5 поступает на схему вычислителя параметров волнения по радиолокационному каналу 17, в котором на основании соотношения
В качестве частотомера может быть применен счетчик числа пересечений среднего уровня огибающей (счетчик нулей). Напряжение, пропорциональное среднеквадратичному значению ширины спектра флуктуации огибающей (и средней частоте флуктуации), через интегратор 5 поступает на схему вычислителя параметров волнения по радиолокационному каналу 17, в котором на основании соотношения
определяется высота морских волн h,
где  - средняя частота междупериодных флуктуации;
- средняя частота междупериодных флуктуации;
ψ0 - угол скольжения;
k=k1·k2 - коэффициент, где k1=0,059, а k2=0,082, если h=h3% (где h3% - высота волн трехпроцентной обеспеченности) и k1=0,125, а k2=0,173, если интенсивность волнения оценивается по средним высотам волн;
α - направление к главному направлению бега волн.
Определение главного направления распространения энергии морского волнения и коэффициента анизотропности структуры волнового поля (m) производится через зависимость средней частоты междупериодных флуктуации сигнала от курсового угла антенны РЛС путем определения экстремальных значений этой частоты:



где g - ускорение свободного падения;
λ - длина волны электромагнитных волн в свободном пространстве.
Главное направление бега морских волн совпадает с курсовым углом антенны, на котором наблюдается максимальное значение средней частоты междупериодных флуктуации сигнала, что соответствует максимальной ширине спектра этих флуктуации. Линия гребней морских волн совпадает с курсовым углом антенны РЛС, на котором наблюдаются минимумы значений 
 либо Δf(α).
либо Δf(α).
Определение главного распространения энергии морского волнения и коэффициента анизотропности структуры волнового поля и высоты морских волн производится посредством блоков 13, 14, 15, 16 и 17, представляющих собой канал обработки радиолокационных сигналов, получаемых с РЛС.
С блока 12 сигналы поступают на функциональный преобразователь 18. Автоматическое корреляционное устройство осуществляет вычисление взаимно-корреляционной функции и слежение за ее максимумом по сигналам, полученным по радиолокационному каналу и радиодоплеровскому каналу определения высоты волн. Система слежения регулирует введенную временную задержку, поддерживая максимальное значение корреляционной функции. При этом по значению введенной задержки τ3 определяется скорость главной волны. Корреляционное устройство работает следующим образом. Непрерывные входные сигналы в данном устройстве заменяются знакопеременными сигналами постоянной амплитуды  и
и  знаки которых соответствуют знакам входных сигналов, т.е. выполняется операция клиппирования, что осуществляется посредством усилителей-ограничителей 117 и 118 (фиг.13). Далее осуществляется построение знаковой взаимно-корреляционной функции, линейно связанной с вероятностью совпадения знаков входных сигналов:
знаки которых соответствуют знакам входных сигналов, т.е. выполняется операция клиппирования, что осуществляется посредством усилителей-ограничителей 117 и 118 (фиг.13). Далее осуществляется построение знаковой взаимно-корреляционной функции, линейно связанной с вероятностью совпадения знаков входных сигналов:
Знаковая взаимно-корреляционная функция связана с обычной нормированной взаимно-корреляционной функцией двух величин, имеющих нормальное совместное распределение, соотношением r12(τ)=2π arcsin ρ12(τ3-τт).
Слежение за максимумом взаимно-корреляционной функции осуществляется с помощью дифференциальной системы слежения, сигналом рассогласования которой является разность двух значений взаимно-корреляционной функции, соответствующих задержкам τ31=τ3-Δτ и τ32=τ3+Δτ.
Клиппированные сигналы подаются на вход электронного коррелятора. Сигнал передней антенны (антенны РЛС) поступает в регистр сдвига 114 с двумя отводами и переменной частотой продвигающих импульсов, выполняющий функции блока регулируемой задержки. В регистре сдвига 114 сигнал квантуется с частотой продвигающихся импульсов fn=1/Тn и задерживается во времени. Задержка равна для первого отвода регистра τ13=τ3-Δτ=Tn(N-n), а для второго отвода τ32=τ3+Δτ=Tn(N-n), где Тn - период следования продвигающихся импульсов; (N-n), (N+n) - соответствующие отводам числа ячеек регистра сдвига 114. Сигналы с выходов регистра сдвига поступают на входы схем совпадения 116 и 115, на вторые входы которых подается сигнал
С выходов схем совпадения 116 и 115 импульсные последовательности, соответствующие произведениям
 и
и 
поступают на интеграторы 120 и 121, в качестве которых использованы счетчики импульсов, и далее на вычитающее устройство 122, которое вырабатывает сигнал рассогласования, воздействующий на управляемый генератор тактовых импульсов 117 и изменяющий его частоту, т.е. введенную задержку, таким образом, чтобы рассогласование стало равным нулю. Так как корреляционная функция является четной функцией, то равенство нулю сигнала рассогласования наступает при равенстве введенной задержки транспортному запаздыванию Δr=r12(t-τТ+Δτ)-r12(t-τТ-Δτ)=0.
Измеряя частоту следования продвигающих импульсов в вычислительном блоке 123, определяется скорость движения главной волны Vгв=Хо/τт.
Для исключения сильно зашумленных кодовых измерений высоты фазовыми скоростями перемещений судна применен субоптимальный фильтр 78.
Текущая оценка Zi с помощью любого линейного фильтра в виде суммы прогноза Zi и фильтрованной оценки текущего измерения:
где Zi eci - текущее значение измерения;
α - коэффициент передачи, определяет постоянную времени фильтра α=1τс;

Поскольку оценка  формируется из высокоточных фазовых измерений, воспроизводящих в том числе и динамику судна с миллиметровой (субмиллиметровой) точностью формула (2) определяет самый высокоточный прогноз для любого линейного фильтра. Подставляя (2) в (1) получим α - БИХ фильтр, оптимальным образом сглаживающий кодовые измерения фазовыми:
формируется из высокоточных фазовых измерений, воспроизводящих в том числе и динамику судна с миллиметровой (субмиллиметровой) точностью формула (2) определяет самый высокоточный прогноз для любого линейного фильтра. Подставляя (2) в (1) получим α - БИХ фильтр, оптимальным образом сглаживающий кодовые измерения фазовыми:

Результатом обработки являются оптимальным образом сглаженные кодовые измерения, однако данный фильтр не может убрать постоянный низкочастотный тренд ошибок высотных измерений в силу достаточно большой величины α. Для исключения этого тренда достаточно применить к уже сглаженной оценке этот же самый фильтр повторно, но с большим коэффициентом α (глубокое сглаживание). Анализ низкочастотного шума позволяет сделать вывод, что компромиссным вариантом будет выбор α=0,15 1/с. Далее выполняется центрирование (вычитание из оценки тренда). После исключения тренда производится вычисление дисперсии полученной центрированной оценки:
где Hi - значения центрированного тренда;
N - количество значений в выборке.
В блоке 18 по входным сигналам определяется амплитуда колебаний, которая выводится через дисперсию  где А - искомая амплитуда, σ - средняя квадратическая ошибка.
где А - искомая амплитуда, σ - средняя квадратическая ошибка.
Далее производится вычисление периода волн методом подсчета числа пересечений волновым профилем нулевой линии и скорость поверхностного ветрового течения в соответствии с зависимостью VW=±0,17W0,56, где W - скорость ветра, определяемая посредством судового измерителя ветра (Перепелицын О.В., Чернявец В.В. Исследование поверхностного ветрового течения в море // Известия АН СССР. Сер. Физика атмосферы и океана. М., 1978, т.18, №2, с.219). В блоке 18 высота волны hi определяется как hi=r1+r2, где r1 - высота предыдущего полупериода, r2 - высота последующего полупериода по сформированным выборкам на заданных временных интервалах. При наличии нескольких одинаковых максимальных амплитуд за полупериод для расчета высоты волны используется любая из них. После определения значений высот волн и их количества в реализации рассчитывается среднее значение высоты волны
 где m - число волн за время измерения 20 минут.
где m - число волн за время измерения 20 минут.
Для определения высоты волны 3% обеспеченности из массива высот волн отбирается 20 максимальных волн, которые располагаются по мере убывания с присвоением порядкового индекса от 1 до 20 начиная с максимальной амплитуды. Затем вычисляется индекс 3% обеспеченности К3%=3m/100. Высота волны, соответствующая этому индексу, будет трехпроцентной.
Алгоритмы работы блока 18 приведены на чертежах (фиг.20, 21 и 22).
Индикатор 19 представляет собой видеоплотер, в состав которого таже входят электронная картографическя система с набором электронных карт в соответствии с требованиями IMO (Resolution А. 817/19), судовой приемник спутниковой навигации для прокладки курса судна на цветном жидкокристалическом дисплее, на который также выводятся параметры волнения. При этом высота волн коррелирует с данными электронной карты.
Антенна 1 снабжена сканирующим устройством, обеспечивающим перемещение антенны в секторе 45 градусов от вертикальной плоскости, что позволяет измерять параметры волнения не только непосредственно у борта судна, но и на некотором расстоянии от борта судна.
Ввод новых элементов выгодно отличает предлагаемое устройство от аналогов и прототипов, так как обеспечивается полный набор спектральных составляющих измеряемых параметров в наиболее очищенном от помех виде, что обеспечивает высокую точность и безынерционность измерений не только непосредственно у борта, например судна, но и на удалении от судна на расстояние порядка нескольких десятков километров, что позволит предпринять заранее необходимые меры безопасности при неблагоприятных гидрометеорологических условиях.
Выполненная оценка точности измерения посредством предлагаемого устройства показала, что при h3%=4 м (неполное шестибальное волнение), φ=45°, Δf=0,01 Гц, среднеквадратичное значение ошибки измерения составит:
непосредственно у борта судна 0,031 м, на удалении от судна на 25-50 км соответственно 0,06-0,11 м, что значительно выше, чем у аналогов.
Сочетание двух каналов измерения параметров морского волнения позволит значительно расширить область применения предлагаемого устройства, что обеспечит не только осуществление адаптации контура управления подвижных морских объектов к характеристикам морского волнения, но и позволит осуществлять прогноз возможных нежелательных возмущений, могущих привести к аварийной ситуации при эксплуатации стационарных и плавучих платформ различного назначения.
Опыт обеспечения больших морских нефтегазовых терминалов показывает, что оперативный учет гидрометеорологической обстановки позволяет снизить неблагоприятное влияние погодных факторов при эксплуатации крупнотоннажных судов в среднем на 70%. В среднем гидрометеорологические условия могут снизить эффективность функционирования, например, промыслов на шельфе арктических морей на 10-12%, а его отдельных элементов на 20-30%.
Реализация предлагаемого технического решения технической трудности не представляет, что позволяет сделать вывод о его соответствии условию патентоспособности "промышленная применимость".
Источники информации
1. Загородников А.А. Радиолокационная съемка морского волнения. Л., Гидрометеоиздат, 1978, с.141-158.
2. Ванаев А.П., Чернявец В.В. Определение параметров волнения совмещенной системой измерения скорости судна и высоты волн. / Судостроение №8-9, 1993, с.6-8.
3. Патент РФ №2137153.
4. Патент РФ №1240169.
5. Патент FR №2275777 А1 от 20.02.1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2008 |
|
RU2376653C1 |

Изобретение относится к измерению параметров волнения посредством устройств, представляющих собой радиотехнические неконтактные измерители. Устройство измерения параметров волнения состоит из антенны, приемопередатчика, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, вычислителя временных интервалов, схемы определения флуктуационной составляющей скорости, устройства для определения направления волн, вычислителя угла встречи с волной, инерциального модуля, блока коррекции, функционального устройства и индикатора, определенным образом соединенных между собой. Достигаемым техническим результатом изобретения является повышение достоверности параметров волнения водной поверхности с движущегося объекта. 24 ил.
Устройство измерения параметров волнения, состоящее из антенны, приемопередатчика, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, вычислителя временных интервалов, схемы определения флуктуационной составляющей скорости, устройства для определения направления волн, вычислителя угла встречи с волной, инерциального модуля, обеспечивающего измерение собственных вертикальных перемещений объекта, блока коррекции, в котором антенна входом и выходом соединена с входом и выходом приемопередатчика, который двумя выходами соединен с двумя входами блока измерения высоты, который двумя выходами соединен с вычислителем временных интервалов и этими же выходами соединен с двумя входами вычислителя высоты волн и фазовой скорости волн и еще двумя выходами соединен с устройством для определения направления прихода волн, выход которого соединен со входом вычислителя угла встречи с волной, два других входа которого соединены соответственно с выходами вычислителя временных интервалов, вычислителя высоты волн и фазовой скорости волн, еще два входа устройства для определения направления прихода волн соединены с двумя выходами схемы определения флуктуационной составляющей скорости, которая двумя входами соединена с двумя выходами блока измерения скорости и еще двумя входами соединена с двумя выходами измерителя доплеровской частоты, который этими же выходами соединен с двумя входами блока измерения скорости, а измеритель частоты Доплера двумя входами соединен с еще двумя выходами передатчика, а блок коррекции своими входами соответственно соединен с выходами вычислителя высоты волн и фазовой скорости волн, вычислителя угла встречи с волной, блока измерения скорости и двумя выходами инерциального модуля, который входом соединен с выходом блока измерения скорости, который еще двумя входами соединен с теми же выходами приемопередатчика, что и измеритель частоты Доплера, содержащее также стробирующее устройство, детектор, частотомер, интегратор, вычислитель параметров волнения по радиолокационному каналу, два выхода которого соединены с еще двумя входами блока коррекции, а вход соединен с выходом интегратора, вход которого соединен с выходом частотомера, вход которого соединен с выходом детектора, вход которого соединен с выходом стробирующего устройства, на вход которого подаются видеоимпульсы от судовой некогерентной радиолокационной станции, вычислитель временных интервалов еще одним выходом соединен с еще одним входом устройства определения направления волн, отличающееся тем, что дополнительно введены индикатор и функциональное устройство, предназначенное для определения высоты волн, вход которого соединен с выходом блока коррекции, а выход - с входом индикатора, в состав которого входит электронная картографическая система с набором электронных карт, при этом высота определяемых волн коррелирует с данными соответствующей электронной карты, кроме того, антенна снабжена сканирующим устройством, обеспечивающим ее перемещение в секторе 45° от вертикальной плоскости для обеспечения измерения параметров волнения непосредственно у борта судна и на расстоянии от него.
| RU 2004107155 А, 20.09.2005 | |||
| RU 2000104391 A, 10.10.2000 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 1984 |
|
SU1240169A1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2254600C1 |
| US 5471433 A, 28.11.1995 | |||
| US 5923459 A, 13.07.1999 | |||
| ЛАЗЕР | 1988 |
|
SU1634087A1 |
| JP 6127682 A, 29.11.1986. | |||

