Изобретение относится к области радиолокации, в частности к обнаружению, определению местоположения и сопровождению малозаметного низколетящего над морской поверхностью (МП) со сверхзвуковой скоростью объекта.
Устройство позволяет сопровождать даже полностью невидимые объекты, летящие вблизи МП и создающие за собой возмущения воздушного пространства (псевдозвуковую волну). На момент обнаружения предполагается равномерное прямолинейное перемещение объекта над МП без изменения высоты полета со скоростью превышающей 1,2 Маха.
Применение многопозиционной радиолокации (обработка информации от пространственно разнесенных нескольких предлагаемых устройств) может повысить эффективность применения устройства.
Устройство предназначено для технической реализации определения местоположения сверхзвукового низколетящего объекта по следу на морской поверхности.
Способ определения местоположения объекта основан на наличии за объектом аномалии морской поверхности (АМП). На взволнованной МП под воздействием акустической волны, образованной пролетающим объектом, выполаживаются мелкоструктурные поверхностные волны, уменьшая удельную эффективную поверхность рассеяния МП для радиолокационных сигналов.
Ширина следа (аномалии) определяется, в том числе, и углом падения звуковой волны на МП. Это связано со свойством звуковой волны на углах падения более 12,7° [1] отражаться от границы сред (водной поверхности), в результате чего передача энергии значительно уменьшается.
МП является статистически неровной, поэтому для оценки угла отражения от границы сред учитывается уклон крупных поверхностных волн МП. Для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности [2]. Средний уклон крупных волн может составлять величину от 0 до 18,2° [2]. Ширина аномалии с учетом угла падения и уклона волн может быть рассчитана по формуле:
 ,
,
где В - ширина аномалии (следа);
h - высота полета объекта;
 - средний уклон крупных волн МП.
- средний уклон крупных волн МП.
Радиолокационное измерение ширины следа позволяет рассчитать высоту полета объекта:

Измеренная радиолокационным способом ширина следа не будет равна истинной ширине следа, так как след пространственно расположен под некоторым углом β к направлению облучения. Для повышения точности измерений требуется усреднить значения ширины следа для всех возможных для измерения результатов и помножить на cosβ:

где  - усредненная измеренная ширина следа;
- усредненная измеренная ширина следа;
β - курсовой угол с объекта на радиолокатор.
Так как расчет местоположения объекта производится по следу, то угол β меняется на βфр - курсовой угол с фронта следа на радиолокатор.
Фронт АМП перемещается с такой же скоростью, что и объект; перемещение фронта АМП со сверхзвуковой скоростью является явным признаком наличия объекта; направление перемещения фронта АМП совпадает с направлением движения объекта. βфр рассчитывается по пеленгу на фронт следа Пфр и курсу объекта Коб (направлению перемещения фронта АМП):

Объект будет находиться относительно АМП в направлении перемещения фронта АМП впереди на расстоянии:

где νзв - скорость распространения звука в воздушном пространстве между объектом и МП;
Vоб - скорость объекта;
Δtфр - время реакции МП на воздействие.
Осуществление способа. До обнаружения АМП производится определение среднего уклона крупных волн МП. Для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности.
После обнаружения АМП: скорость объекта определяется по скорости перемещения фронта АМП, направление движения объекта - по направлению перемещения фронта АМП.
Вычисляется скорость распространения звука в воздушном пространстве между объектом и МП:
 ,
,
где Т - температура воздушного пространства между объектом и МП, К.
На расстоянии от фронта АМП до окончания следа методом стробирования на разных дальностях измеряется ширина следа; значение ширины усредняется. С помощью формулы (2) устраняется ошибка измерения ширины следа за счет разности направления облучения следа и направления движения объекта.
По имеющейся ширине следа В с помощью формулы (1) вычисляется высота полета объекта.
По имеющимся значениям Vоб, νзв, В с помощью формулы (3) вычисляется проекция на МП расстояния от фронта АМП до объекта.
Для осуществления способа предлагается использовать устройство для измерения характеристик морского волнения [3] и устройство для измерения среднего уклона взволнованной водной поверхности [4].
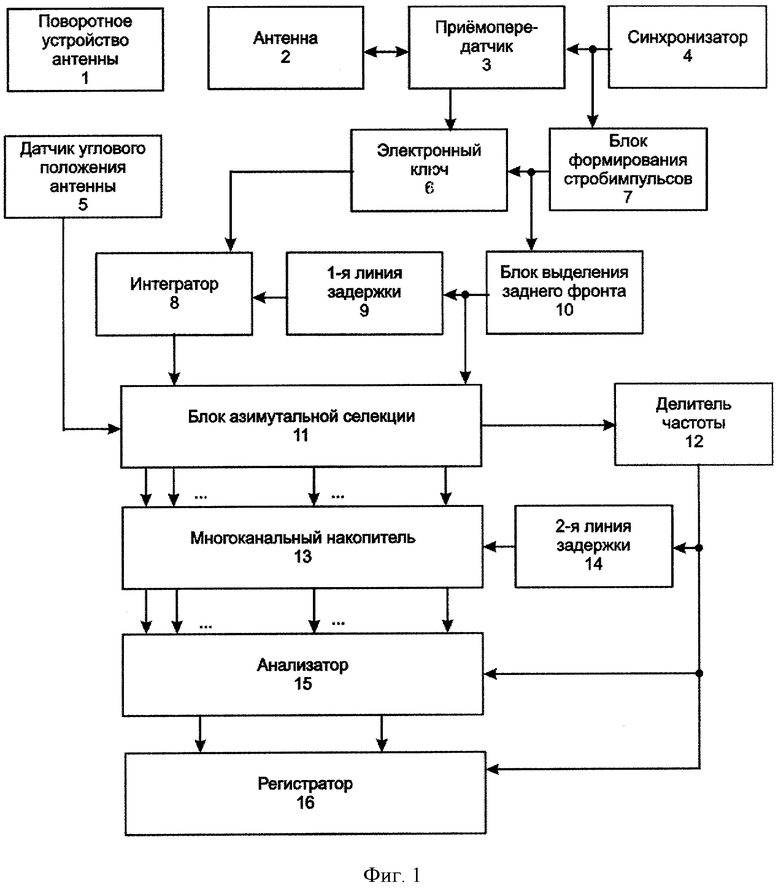
Известное устройство для измерения характеристик морского волнения [3] описано в [2, с.173-177], где приведены структурная схема волномера (фиг.1) и структурная схема блока азимутальной селекции, входящего в радиолокационный волномер (фиг.2).
Устройство [3] (фиг.1) содержит поворотное устройство 1 антенны, антенну 2, приемопередатчик 3, синхронизатор 4, датчик углового положения 5 антенны, электронный ключ 6, блок формирования стробирующих импульсов 7, интегратор 8, первую линию задержки 9, блок выделения заднего фронта 10, блок азимутальной селекции 11, делитель частоты 12, многоканальный накопитель 13, вторую линию задержки 14, анализатор 15, регистратор 16. Блок азимутальной селекции 11 (фиг.2) содержит N каналов, содержащих источники постоянного напряжения 17, компараторы 18, генераторы импульсов 19, элементы И 20, программируемые счетчики 21 и электронные ключи 22, элемент ИЛИ 23 на N входов и электронный ключ 24 блока азимутальной селекции.
Устройство [3] работает следующим образом. Видеосигнал с выхода приемопередатчика 3 проходит через электронный ключ 6 на интегратор 8 только при наличии на управляющем входе электронного ключа 6 разрешающего сигнала, поступающего в виде прямоугольного импульса с выхода блока формирования стробирующих импульсов 7, который синхронизируется импульсами, поступающими от синхронизатора 4. Видеосигнал на выходе приемопередатчика 3 представляет собой последовательность, состоящую из прямоугольного импульса, обусловленного просачиванием сигнала в приемный тракт радиолокационной станции (РЛС) при излучении зондирующего импульса, и сигнала сложной формы, обусловленного отражением от морской поверхности. Время tзад задержки импульса на выходе блока формирования стробирующих импульсов 7 относительно зондирующих импульсов должно быть
 ,
,
где τ - длительность зондирующего импульса;
tм - время, соответствующее «мертвой зоне» после окончания зондирующего импульса.
Блок выделения заднего фронта 10 вырабатывает прямоугольный импульс длительностью τ10, передний фронт которого совпадает по времени с задним фронтом стробирующего импульса на выходе блока 7. Этот импульс, задержанный на время t9 в первой линии задержки 9, устанавливает в исходное (нулевое) состояние интегратор 8. Время задержки должно быть
 ,
,
где ТП - период повторения зондирующих импульсов;
τс - длительность стробирующих импульсов.
Стробирующий импульс должен перекрывать всю область отражений от морской поверхности, следовательно его длительность должна определяться из условия
 ,
,
где Dmax - максимальная дистанция от РЛС, с которой наблюдаются отражения от МП;
c - скорость света.
Дистанция Dmax зависит от типа РЛС и высоты Н подъема антенны над уровнем моря. Так, например, для судовых навигационных РЛС Dmax≈4 мили при HA=15-16 м и Dmax≈7 миль при HA=30 м [5].
После интегрирования видеосигнала, обусловленного отражениями от МП, на выходе интегратора 8 получается напряжение, соответствующее энергии Wij радиолокационных отражений от МП при j-м зондировании в i-м азимутальном направлении, что справедливо для РЛС как с низкой, так и с высокой разрешающей способностью. За время t9 осуществляется передача сигнала от интегратора 8 через блок азимутальной селекции 11 в соответствующий азимутальный канал многоканального накопителя 13. Сигнал с выхода датчика углового положения 5 антенны поступает на один из входов компараторов 18 всех каналов блока азимутальной селекции 11. На второй вход каждого из компараторов 18 подается от источников постоянного напряжения 17 сигнал, соответствующий определенному азимутальному направлению, при этом напряжение Ui на выходе источника постоянного напряжения 17i должно соответствовать азимутальному направлению
 .
.
Количество каналов в блоке азимутальной селекции 11 определяется из условия обеспечения требуемой точности, учитывая, что погрешность Δα измерения генерального направления распространения волн определяется формулой
 .
.
Компараторы 18 вырабатывают сигналы только в моменты совпадения напряжения на двух входах. Эти сигналы запускают генераторы импульсов 19, вырабатывающие прямоугольные импульсы с одинаковой длительностью
 ,
,
где ω - угловая скорость вращения антенны.
Прямоугольные импульсы, поступая на программируемые счетчики 21 предыдущих каналов, передним фронтом устанавливают их в исходное (нулевое) положение, а также поступают на один из входов элементов И 20, на вторые входы которых через электронный ключ 24 блока азимутальной селекции поступают прямоугольные импульсы от блока выделения заднего фронта 10. Эти импульсы проходят через один из элементов И 20, на втором входе которого есть сигнал от генератора импульсов 19, соответствующий азимутальному положению антенны, и открывают электронный ключ 22 соответствующего канала, через который сигнал от интегратора 8 поступает в соответствующий канал многоканального накопителя 13. Электронный ключ 24 закрывается сигналом с выхода элемента ИЛИ 23 при поступлении на один из его входов сигнала от программируемого счетчика 21, который появляется после того, как на вход программируемого счетчика 21 поступит N21 импульсов. Значение

устанавливается одинаковым во всех каналах. В результате при каждом обороте антенны в канале многоканального накопителя 13, каждый из которых соответствует определенному азимутальному положению антенны, поступает одинаковое количество импульсов одинаковой длительности, амплитуда которых соответствует энергии Wij радиолокационных отражений от МП. Следует отметить, что значением N21 определяется сектор Δα усреднения для каждого азимутального направления
 .
.
Делитель частоты 12 пропускает на выход только каждый k-й импульс из поступивших на его вход (k - коэффициент деления). Импульс с выхода делителя частоты 12 задним своим фронтом запускает анализатор 15 и регистратор 16, а после задержки на время t14 во второй линии задержки 14 также задним фронтом устанавливает в исходное (нулевое) положение все каналы многоканального накопителя 13. Таким образом, в каждом канале многоканального накопителя 13 осуществляется накопление (суммирование) сигналов, соответствующих энергии радиолокационных отражений с определенного азимутального направления за k оборотов антенны. Следовательно, время измерения
 .
.
А сигналы на каждом из выходов многоканального накопителя 13 соответствуют средней энергии Wcp1, Wcp2, …, Wcpi, …, WcpN радиолокационных отражений с определенного азимутального направления α1, α2, …, αi, …, αN. Требуемое время измерения задают, устанавливая соответствующее значение коэффициента деления k в делителе 12. За время t14 задержки импульса во второй линии задержки 14 должна обеспечиваться передача массива {Wcp} из многоканального накопителя 13 в анализатор 15. Далее анализатор 15 на основании сравнения между собой элементов массива выбирает максимальный из них.
Сигнал с выхода анализатора 15  , значение которого связано с высотой поверхностных волн [5] измеряется регистратором 16. Кроме того, на регистратор 16 передается от анализатора 15 номер i-го канала, определяющий генеральное направление αГ распространения поверхностных волн
, значение которого связано с высотой поверхностных волн [5] измеряется регистратором 16. Кроме того, на регистратор 16 передается от анализатора 15 номер i-го канала, определяющий генеральное направление αГ распространения поверхностных волн

 .
.
Известное устройство для измерения среднего уклона взволнованной водной поверхности [4] описано в [2, с.178-179], где приведена структурная схема устройства (фиг.3).
Устройство [4] (фиг.3) содержит приемопередатчик 1 импульсного радиолокатора, включающий видеодетектор 2 и синхронизатор 3, детекторы огибающей 4 и 5, первый элемент задержки 6, генератор строб-импульсов 7, интеграторы 8 и 9, блоки выборки и хранения 10 и 11, масштабирующий усилитель 12, блок деления 13, второй элемент задержки 14, генератор тактовых импульсов 15, регистратор 16 и вычислитель среднего уклона взволнованной поверхности 17.
Устройство [4] работает следующим образом. Сигнал с выхода видеодетектора 2 приемопередатчика 1 поступает на вход детекторов огибающей 4 и 5, которые запоминают значения сигнала только в момент поступления строб-импульсов на их управляющие входы. Строб-импульсы поступают с выхода генератора строб-импульсов 7 на детектор огибающей 4 непосредственно и на детектор огибающей 5 через элемент задержки 6. Синхронизация генератора строб-импульсов 7 осуществляется сигналами от синхронизатора 3 приемопередатчика 1. На выходах детекторов огибающей 4 и 5 выделяется огибающая видеоимпульсов, принятых с фиксированных дальностей. При этом разность расстояний от РЛС до селектируемых участков водной поверхности определяется временем задержки строб-импульсов в элементе задержки 6. Следовательно, изменяя время задержки, можно изменять расстояние между указанными участками.
В результате интегрирования огибающих сигналы на выходах интеграторов 8 и 9 получаются пропорциональными средней мощности радиолокационных отражений, т.е. соответственно Р2(α) и Р1(α). Время интегрирования определяется периодом TT следования тактовых импульсов. Результаты интегрирования запоминаются в блоках выборки-хранения аналоговой информации 10 и 11 при подаче на их управляющие входы тактовых импульсов от генератора 15. Длительность тактовых импульсов
 .
.
Сигнал установки интеграторов в исходное (нулевое) положение подается с задержкой в элементе 14 на время
 ,
,
необходимое для запоминания результатов интегрирования в блоках выборки-хранения 10 и 11.
С помощью масштабирующего усилителя 12, имеющего коэффициент передачи
 ,
,
обеспечивается учет различия расстояний до селектируемых участков. Блок деления 13 обеспечивает получение отношения входных сигналов. Таким образом, сигнал на выходе блока 13 пропорционален отношению
 .
.
Вычислитель 17 обеспечивает вычисление среднего уклона  по поступающей от блока 13 информации об указанном отношении и введенных в него перед началом измерений углов скольжения ψ1, ψ2 и коэффициента n, определяемого поляризацией сигналов использованной РЛС, по формуле
по поступающей от блока 13 информации об указанном отношении и введенных в него перед началом измерений углов скольжения ψ1, ψ2 и коэффициента n, определяемого поляризацией сигналов использованной РЛС, по формуле
 .
.
Результат измерения среднего уклона взволнованной поверхности фиксируется регистратором 16.
Устройство для измерения характеристик морского волнения [3] и устройство для измерения среднего уклона взволнованной водной поверхности [4] не предназначены для выявления на МП следа от сверхзвукового низколетящего объекта, но могут быть составными частями такого устройства.
Устройством, имеющим аналогичное предлагаемому устройству назначение, является устройство позиционирования аномалий морского волнения [6]. На фиг.4 представлена функциональная схема устройства позиционирования аномалий морского волнения, включающая: радиолокационную станцию I, поворотное устройство антенны 1; антенну 2; приемопередатчик 3; синхронизатор 4; датчик углового положения антенны 5; электронный ключ устройства 6; блок формирования строб-импульсов 7; интегратор 8; 1-ю линию задержки 9; блок выделения заднего фронта 10; N-канальный блок азимутальной селекции 11; делитель частоты 12; многоканальный накопитель 13; 2-ю линию задержки 14; анализатор 15; цифровую вычислительную машину вторичной обработки радиолокационной информации (ЦВМ-ВО) 24; блок обзора по дальности 25; устройство отображения 26.
Прототипом устройства позиционирования аномалий морского волнения [6] является устройство для измерения характеристик морского волнения [3], таким образом, N-канальный блок азимутальной селекции у устройства [6] и совпадает с блоком азимутальной селекции устройства [3] и представлен на фиг.2.
Известное устройство [3] позволяет измерять высоту волн, генеральное направление их распространения и групповую структуру волн. Однако известное устройство [3] может быть применено только в радиоокеанографии для неконтактных измерений характеристик поверхностного волнения радиолокационными средствами. Реализация устройства [3] позволяет измерять высоту волн, генеральное направление их распространения и групповую структуру волн, но только по результатам дальнейшей трудоемкой обработки с помощью специализированных ЦВМ данных, зафиксированных на регистраторе. Это делает устройство [3] непригодным для обнаружения скоростных объектов. К тому же устройство [3] не позволяет определять дальность до обнаруженной аномалии на поверхности морских волн. Эти недостатки не позволяют использовать устройство [3] для оперативного (в реальном масштабе времени) определения местоположения объектов по обнаружению и определению координат аномалий, возникающих на поверхности волнения вследствие воздействия искомого объекта на его структуру.
Недостатки, присущие устройству [3], устранены в «Устройстве позиционирования аномалий морского волнения» [6], технической задачей которого является определение местоположения источника возникновения аномалий на поверхности морского волнения путем обнаружения аномалий и определения направления и расстояния до них.
Отличием устройства [6] от устройства [3] является то, что в нем многоканальный накопитель соединен с анализатором с возможностью выявления минимума мощности отраженного сигнала, а в качестве регистратора использовано устройство отображения, подключенное к выходам анализатора по азимуту через ЦВМ-ВО. У ЦВМ-ВО отводы по дальности соединены с блоком обзора по дальности (фиг.5), в котором синхроимпульсы от РЛС коммутированы четвертым переключателем блока обзора по дальности на 12-разрядный счетчик или 3-ю линию задержки. Выходы 3-й линии задержки соединены 1-м переключателем блока обзора по дальности с дешифратором, на второй вход которого поступают управляющие сигналы с 6-разрядного счетчика. Выходы дешифратора поочередно через 2-й переключатель блока обзора по дальности и усилитель параллельно соединены с 6-разрядным и 12-разрядным счетчиками. Дополнительным отличием от прототипа является то, что входы по дальности цифровой вычислительной машины вторичной обработки радиолокационной информации соединены с соответствующими выходами блока обзора по дальности с возможностью трассирования цели по информации о дальности до аномалии морского волнения.
Другим дополнительным отличием устройства [6] от устройства [3] является то, что поочередным соединением отводов 3-й линии задержки с дешифратором посредством 1-го переключателя реализована возможность устанавливать положение ближней границы обследуемого участка моря, а выходы дешифратора поочередно, по управляющим сигналам от 6-разрядного счетчика, подключены параллельно 2-м переключателем блока обзора по дальности через усилитель ко входам 6-разрядного и 12-разрядного счетчиков с возможностью перемещения стробов последовательно на 15 метров по дальности.
К дополнительным отличиям устройства [6] от устройства [3] относится и то, что 12-разрядный счетчик и 3-й переключатель блока обзора по дальности образуют делитель частоты импульсов от блока синхронизации или 427 Гц, установленных положением 4-го переключателя блока обзора по дальности с возможностью перемещения меток по экрану устройства отображения и нумерации их в цифровой вычислительной машине вторичной обработки радиолокационной информации.
Кроме того, оба выхода анализатора по азимуту подключены к соответствующим входам цифровой вычислительной машины вторичной обработки с возможностью трассирования цели по информации о направлении на аномалию морского волнения, а выбор положения первого переключателя блока обзора по дальности определяет порядок подачи импульса с выбранного отвода 3-й линии задержки параллельно через усилитель на управляющие входы 12-разрядного и 6-разрядного счетчиков с возможностью установки этих счетчиков в исходное состояние до начала нового цикла сканирования по дальности. Полученная с помощью таких преобразований координатная информация обрабатывается в дополнительно введенной в схему устройства цифровой вычислительной машине вторичной обработки радиолокационной информации, чем решается задача повышения надежности автоматического сопровождение обнаруженных объектов по координатам самого объекта и аномалии на поверхности морского волнения, возникающей вследствие воздействия этого объекта на мелкоструктурные составляющие волнения.
Именно наличие в устройстве [6] отличительных и дополнительных отличительных от устройства [3] признаков позволяет при его реализации определить не только параметры поверхностного волнения, но еще азимут и расстояние до искомого объекта и аномалии на поверхности морских волн, вызванной его присутствием, то есть определить местоположения источника аномалии на поверхности морского волнения, повысить дальность обнаружения объекта и снизить временные затраты на идентификацию объектов, обеспечивая индикацию на экране РЛС объекта и вызванной его присутствием аномалии на поверхности волнения, а также сопровождение объекта в практически реальном масштабе времени.
Устройство [6] (фиг.4) работает следующим образом. Видеосигнал с выхода приемопередатчика 3 проходит через электронный ключ 6 на интегратор 8 только при наличии на управляющем входе электронного ключа 6 разрешающего сигнала, поступающего в виде прямоугольного импульса с выхода блока формирования стробирующих импульсов 7, который синхронизируется импульсами, поступающими от синхронизатора 4. Видеосигнал на выходе приемопередатчика 3 представляет собой последовательность, состоящую из прямоугольного импульса, обусловленного просачиванием сигнала в приемный тракт РЛС при излучении зондирующего импульса, и сигнала сложной формы, обусловленного отражением от МП. Время tзад задержки импульса на выходе блока формирования стробирующих импульсов 7 относительно зондирующих импульсов должно быть
 ,
,
где τ - длительность зондирующего импульса;
tм - время, соответствующее «мертвой зоне» после окончания зондирующего импульса.
Блок выделения заднего фронта 10 вырабатывает прямоугольный импульс длительностью τ10, передний фронт которого совпадает по времени с задним фронтом стробируюшего импульса на выходе блока 7. Этот импульс, задержанный на время t9 в первой линии задержки 9, устанавливает в исходное (нулевое) состояние интегратор 8. Время задержки должно быть
 ,
,
где TП - период повторения зондирующих импульсов;
τс - длительность стробирующих импульсов.
Стробирующий импульс должен перекрывать всю область отражений от морской поверхности, следовательно, его длительность должна определяться из условия
 ,
,
где Dmax - максимальная дистанция от РЛС, с которой наблюдаются отражения от МП;
c - скорость света.
Дистанция Dmax зависит от типа РЛС и высоты HA на подъема антенны над уровнем моря. Так, например, для судовых навигационных РЛС Dmax≈4 мили при HA=15-16 м и Dmax≈7 миль при HA=30 м (см., например: [7]).
После интегрирования видеосигнала, обусловленного отражениями от МП, на выходе интегратора 8 получается напряжение, соответствующее энергии Wij радиолокационных отражений от МП при j-м зондировании в i-м азимутальном направлении, что справедливо для РЛС как с низкой, так и с высокой разрешающей способностью. За время t9 осуществляется передача сигнала от интегратора 8 через TV-канальный блок азимутальной селекции 11 в соответствующий азимутальный канал многоканального накопителя 13. Сигнал с выхода датчика углового положения антенны 5 поступает параллельно на соответствующие входы компараторов 18.1-18.N (фиг.2) всех N каналов блока азимутальной селекции 11. На второй вход каждого из компараторов 18.1-18.N подается от источников постоянного напряжения 17.1-17.N сигнал, соответствующий определенному азимутальному направлению, при этом напряжение Ui на выходе источника постоянного напряжения 17i должно соответствовать азимутальному направлению
 .
.
Количество каналов в блоке азимутальной селекции 11 определяется из условия обеспечения требуемой точности, учитывая, что погрешность Δα измерения генерального направления распространения волн определяется формулой
 .
.
Компараторы 18.1-18.N вырабатывают сигналы только в моменты совпадения напряжений на двух входах. Эти сигналы запускают генераторы импульсов 19.1-19.N, вырабатывающие прямоугольные импульсы с одинаковой длительностью
 ,
,
где ω - угловая скорость вращения антенны.
Прямоугольные импульсы, поступая на соответствующие программируемые счетчики 21.1-21.N предыдущих каналов, передним фронтом устанавливают их в исходное (нулевое) положение, а также поступают на соответствующие входы элементов И 20.1-20.N, на вторые входы которых через N+1-й электронный ключ 24 блока азимутальной селекции поступают прямоугольные импульсы от блока выделения заднего фронта 10. Эти импульсы проходят через соответствующие элементы И 20.1-20.N, на втором входе каждого из которых есть сигнал от соответствующего генератора импульсов 19.1-19.N, соответствующий азимутальному положению антенны, и открывают электронные ключи 22.1-22.N соответствующего канала, через который сигнал от интегратора 8 поступает в соответствующий канал многоканального накопителя 13. N+1-й электронный ключ 24 закрывается сигналом с выхода элемента ИЛИ 23 при поступлении на его соответствующие входы сигналов от соответствующих программируемых счетчиков 21.1-21.N, которые поступают после того, как на вход соответствующего программируемого счетчика 21.1-21.N поступит N21 импульсов.
Значение

устанавливается одинаковым во всех каналах. В результате, при каждом обороте антенны в каналы многоканального накопителя 13, каждый из которых соответствует определенному азимутальному положению антенны, поступает одинаковое количество импульсов одинаковой длительности, амплитуда которых соответствует энергии Wij, радиолокационных отражений от МП. Значением N21 определяется сектор Δα усреднения для каждого азимутального направления
 .
.
Делитель частоты 12 пропускает на выход только каждый k-й импульс из поступающих на его вход (k - коэффициент деления). Импульс с выхода делителя частоты 12 задним своим фронтом запускает анализатор 15 и поступает на цифровую вычислительную машину вторичной обработки радиолокационной информации 16, а после задержки на время t14 во второй линии задержки 14 также задним фронтом устанавливает в исходное (нулевое) положение все каналы многоканального накопителя 13. Таким образом, в каждом канале многоканального накопителя 13 осуществляется накопление (суммирование) сигналов, соответствующих энергии радиолокационных отражений с определенного азимутального направления за k оборотов антенны. Следовательно, время измерения
 ,
,
а сигналы на каждом из выходов многоканального накопителя 13 соответствуют средней энергии Wcp1, Wcp2, …, Wcpi, …, WcpN радиолокационных отражений с определенного азимутального направления α1, α2, …, αi, …, αN. Требуемое время измерения tизм задают, устанавливая соответствующее значение коэффициента деления k в делителе частоты 12. За время t14 задержки импульса во второй линии задержки 14 должна обеспечиваться передача массива {Wcp} из многоканального накопителя 13 в анализатор 15. Далее анализатор 15 на основании сравнения между собой элементов массива Wcp1, Wcp2, …Wcpi, …WcpN выбирает минимальный из них Wcpmin=Wcpi (где i - номер канала; i=1, 2, …N). Сигнал с выхода анализатора 15, соответствующий Wcp min, значение которого связано с высотой поверхностных волн (см., например, [8]), поступает на цифровую вычислительную машину вторичной обработки радиолокационной информации 16 и далее - на устройство отображения радиолокационной информации 26 в виде цифрового кода пеленга (азимута) на область просматриваемой поверхности с минимальной мощностью отражений (аномалию). Кроме того на цифровую вычислительную машину вторичной обработки радиолокационной информации 16 передается от анализатора 15 номер i канала, определяющий генеральное направление αг распространения поверхностных волн αг=αi+π и от блока обзора по дальности 25 метки дальности. В результате, после обработки в цифровой вычислительной машине вторичной обработки радиолокационной информации 16 всей поступившей в нее координатной информации, на устройство отображения передается в цифровом виде информация о сопровождаемой аномалии поверхностного волнения для дальнейшего ее отображения и идентификации с источником возникновения аномалии. Блок обзора по дальности 25 (фиг.5) в свою очередь работает следующим образом: импульсы синхронизации РЛС с частотой посылок станции поступают на 3-ю линию задержки 30, где в зависимости от положения переключателя П1 задерживаются на время 0,3…8,4 мкс, определяющее ближнюю границу обследуемого участка моря (900…2520 м). С помощью дешифратора 29, управляемого 6-разрядным счетчиком 28, отводы 3-й линии задержки 30 поочередно подключаются ко входу дешифратора 29 в блоке обзора по дальности, перемещая стробы на 15 м по дальности.
Частота коммутации, определяющая время регистрации отражений с фиксированной дальности, устанавливается 3-м переключателем П3, образующим вместе с 12-разрядным счетчиком 27 делитель частоты посылок или 427 Гц с коэффициентом деления от 1 до 211. Максимальная дальность просматриваемого участка морской поверхности устанавливается 2-м переключателем П2, через который первый же импульс, направляемый в цифровую вычислительную машину вторичной обработки радиолокационной информации 16 с выбранного отвода 3-й линии задержки 30 одновременно через усилитель, не обозначенный на фиг.5, поступает на установочные входы 12-разрядного 27 и 6-разрядного 28 счетчиков и переводит их в исходное положение для начала нового цикла сканирования. Метки дальности, нумерующие перемещение строба в течение цикла сканирования, вырабатываются делителем частоты, сформированным 12-разрядным счетчиком 27 и 3-м переключателем П3. Метка Dmin образуется при подключении к цифровой вычислительной машине вторичной обработки радиолокационной информации 16 первого отвода 3-й линии задержки 30.
«Устройство позиционирования аномалий морского волнения» является устройством для определения местоположения источника возникновения аномалий на взволнованной морской поверхности методом позиционирования (определения координат) аномалий. Однако не позволяет определить расстояние от аномалии МП до объекта, вызвавшего аномалию, а также другие параметры движения объекта, в том числе и высоту полета объекта.
Предлагаемое для определения местоположения сверхзвукового низколетящего объекта по следу на морской поверхности устройство представлено на фиг.6 и содержит антенну 1, приемопередатчик 2, синхронизатор 3, генератор стробирующих импульсов 4, датчик углового положения (УП) антенны 5, электронный ключ 6, блок выделения заднего фронта 7, интегратор 8, первую линия задержки 9, блок азимутальной селекции 10, делитель частоты 11, многоканальный накопитель 12, вторую линию задержки 13, линии задержки (ЛЗ) 14, электронные ключи (ЭК) 15, детекторы огибающей (ДО) 16, третью линию задержки 17, интеграторы (Инт) 18, генератор тактовых импульсов 19, блоки выборки и хранения (БВХ) 20, масштабирующие усилители (МУ) 21, анализатор 22, устройство памяти 23, решающее устройство 24, вычислитель среднего уклона волн (СУВ) взволнованной МП 25, блок деления 26, устройство отображения 27.
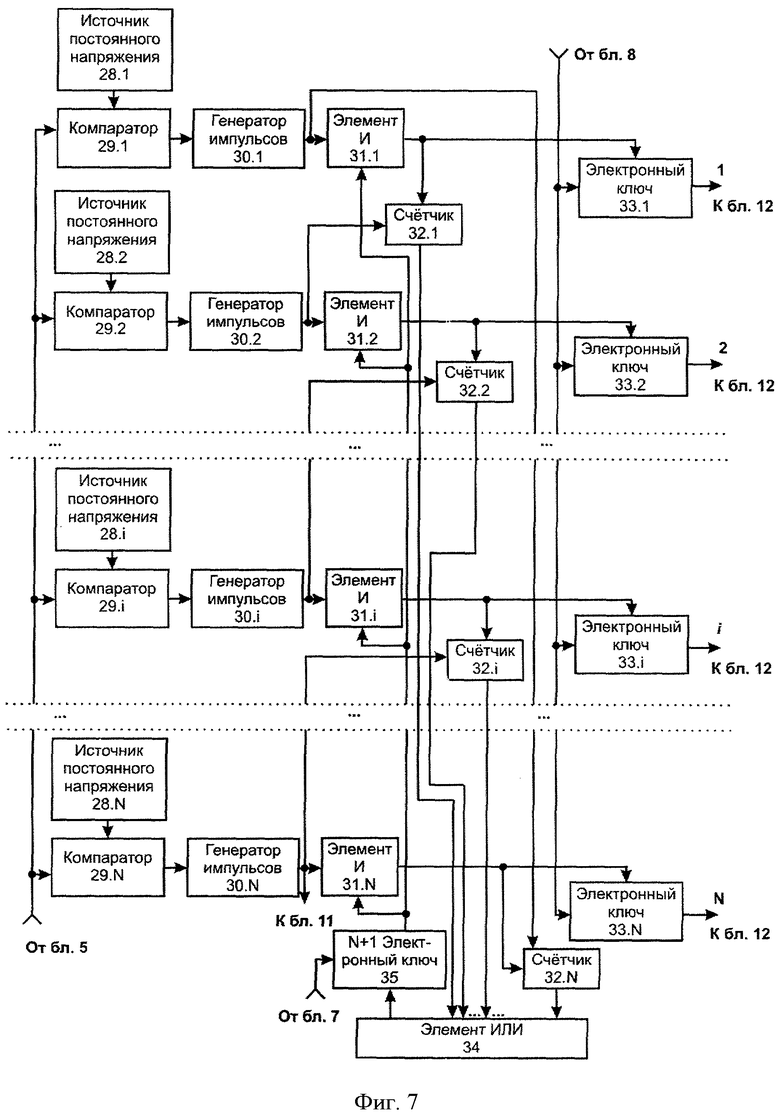
Входящий в состав устройства определения местоположения объекта блок азимутальной селекции в виде структурной схемы показан на фиг.7 и аналогичен блоку азимутальной селекции устройства для измерения характеристик морского волнения [3] и устройства позиционирования аномалий морского волнения [6]. На схеме показаны N каналов, содержащих источники постоянного напряжения 28, компараторы 29, генераторы импульсов 30, элементы И 31, программируемые счетчики 32 и электронные ключи 33, элемент ИЛИ 34 на N входов и электронный ключ 35 блока азимутальной селекции.
На функциональной схеме устройства определения местоположения сверхзвукового низколетящего объекта по следу на морской поверхности (фиг.6) блок обзора по дальности показан в виде М каналов, каждый из которых содержит линию задержки 14, электронный ключ 15, детектор огибающей 16, интегратор 18, блок выборки и хранения 20, масштабирующий усилитель 21, прохождение информации в каналах осуществляется с помощью генератора тактовых импульсов 19 и третьей линии задержки 17.
Отличием предлагаемого устройства от устройства позиционирования является то, что устройство дополнительно содержит блок деления, вычислитель среднего уклона волн; цифровая вычислительная машина вторичной обработки радиолокационной информации заменена двумя устройствами - устройством памяти и решающим устройством; блок обзора по дальности содержит генератор тактовых импульсов, линию задержки, и М каналов дальности, каждый из которых содержит последовательно соединенные между собой линию задержки, электронный ключ, детектор огибающей, блок выборки и хранения, масштабирующий усилитель; информационные входы электронных ключей всех каналов блока обзора по дальности объединены и соединены с выходом приемопередатчика; вторые входы электронных ключей соединены с генератором стробирующих импульсов через соответствующее номеру канала количество последовательно соединенных линий задержки; информация с блока обзора по дальности поступает в анализатор, где по результату сравнения между собой элементов двумерной матрицы по критерию минимума значения элементов матрицы принимается решение о наличии локального участка минимальных значений, определяется местоположение фронта аномалии; в анализаторе производится сравнение полученной за обзор информации с усредненной накопленной информацией предыдущих обзоров, сохраняемой в устройстве памяти; с выходов двух масштабирующих усилителей, которые выбираются по условию оптимальности углов скольжения излучения радиолокатора для измерения уклона волн морской поверхности, информация поступает на блок деления; от блока деления информация поступает на вычислитель среднего уклона крупных волн морской поверхности, где по известным углам скольжения излучения радиолокатора и коэффициенту, определяемому поляризацией сигналов радиолокатора, вычисляется средний уклон, а результат передается в решающее устройство; в устройство памяти записывается информация о температуре воздуха над морской поверхностью, которая затем при каждом вычислении поступает в решающее устройство; из решающего устройства в устройство памяти записывается результат вычисления высоты полета объекта и расстояние от него до фронта аномалии, который затем для сравнения со следующим результатом поступает в решающее устройство; информация с решающего устройство может поступать как на устройство отображения, так и в блок сопровождения цели.
Именно наличие в предложенном устройстве отличительных и дополнительных отличительных от устройства позиционирования признаков позволяет при его реализации определить не только азимут и расстояние до аномалии на поверхности морских волн, но еще расстояние между вызывающим аномалию объектом и фронтом аномалии, а также высоту полета объекта, что повысит точность сопровождения объекта в практически реальном масштабе времени.
Краткое описание чертежей
Фигура 1. Функциональная схема устройства для измерения характеристик морского волнения. Устройство для измерения характеристик морского волнения - аналог изобретения. На схеме показаны поворотное устройство 1 антенны, антенна 2, приемопередатчик 3, синхронизатор 4, датчик углового положения 5 антенны, электронный ключ 6, блок формирования стробирующих импульсов 7, интегратор 8, первая линия задержки 9, блок выделения заднего фронта 10, блок азимутальной селекции 11, делитель частоты 12, многоканальный накопитель 13, вторая линия задержки 14, анализатор 15, регистратор 16.
Фигура 2. Структурная схема блока азимутальной селекции. Блок азимутальной селекции входит в состав устройства для измерения характеристик морского волнения (аналога) и устройства позиционирования аномалий морского волнения (прототипа). На схеме показаны N каналов, содержащих источники постоянного напряжения 17, компараторы 18, генераторы импульсов 19, элементы И 20, программируемые счетчики 21 и электронные ключи 22, элемент ИЛИ 23 на N входов и электронный ключ 24 блока азимутальной селекции.
Фигура 3. Функциональная схема устройства для измерения среднего уклона взволнованной водной поверхности. Устройство для измерения среднего уклона взволнованной водной поверхности - аналог изобретения. На схеме показаны приемопередатчик 1 импульсного радиолокатора, включающий видеодетектор 2 и синхронизатор 3, детекторы огибающей 4 и 5, первый элемент задержки 6, генератор строб-импульсов 7, интеграторы 8 и 9, блоки выборки и хранения 10 и 11, масштабирующий усилитель 12, блок деления 13, второй элемент задержки 14, генератор тактовых импульсов 15, регистратор 16 и вычислитель среднего уклона взволнованной поверхности 17.
Фигура 4. Функциональная схема устройства позиционирования аномалий морского волнения. Устройство позиционирования аномалий морского волнения - прототип изобретения. На схеме показаны поворотное устройство антенны 1; антенна 2; приемопередатчик 3; синхронизатор 4; датчик углового положения антенны 5; электронный ключ устройства 6; блок формирования строб-импульсов 7; интегратор 8; 1-я линия задержки 9; блок выделения заднего фронта 10; N-канальный блок азимутальной селекции 11; делитель частоты 12; многоканальный накопитель 13; 2-я линия задержки 14; анализатор 15; цифровая вычислительная машина вторичной обработки радиолокационной информации 24; блок обзора по дальности 25; устройство отображения 26.
Фигура 5. Структурная схема блока обзора по дальности устройства позиционирования аномалий морского волнения. В блоке обзора по дальности синхроимпульсы от РЛС коммутированы четвертым переключателем блока обзора по дальности на 12-разрядный счетчик или 3-ю линию задержки. Выходы 3-й линии задержки соединены 1-м переключателем блока обзора по дальности с дешифратором, на второй вход которого поступают управляющие сигналы с 6-разрядного счетчика. Выходы дешифратора поочередно через 2-й переключатель блока обзора по дальности и усилитель параллельно соединены с 6-разрядным и 12-разрядным счетчиками, входы по дальности цифровой вычислительной машины вторичной обработки радиолокационной информации соединены с соответствующими выходами блока обзора по дальности с возможностью трассирования цели по информации о дальности до аномалии морского волнения.
Фигура 6. Функциональная схема устройства определения местоположения объекта. Предлагаемое для определения местоположения сверхзвукового низколетящего объекта по следу на морской поверхности устройство содержит антенну 1, приемопередатчик 2, синхронизатор 3, генератор стробирующих импульсов 4, датчик углового положения антенны 5, электронный ключ 6, блок выделения заднего фронта 7, интегратор 8, первую линия задержки 9, блок азимутальной селекции 10, делитель частоты 11, многоканальный накопитель 12, вторую линию задержки 13, линии задержки 14, электронные ключи 15, детекторы огибающей 16, третью линию задержки 17, интеграторы 18, генератор тактовых импульсов 19, блоки выборки и хранения 20, масштабирующие усилители 21, анализатор 22, устройство памяти 23, решающее устройство 24, вычислитель среднего уклона волн взволнованной МП 25, блок деления 26, устройство отображения 27.
Фигура 7. Структурная схема блока азимутальной селекции устройства определения местоположения объекта. Блок азимутальной селекции входит в состав устройства определения местоположения сверхзвукового низколетящего объекта по следу на морской поверхности. На схеме показаны N каналов, содержащих источники постоянного напряжения 28, компараторы 29, генераторы импульсов 30, элементы И 31, программируемые счетчики 32 и электронные ключи 33, элемент ИЛИ 34 на N входов и электронный ключ 35 блока азимутальной селекции.
Устройство работает следующим образом. Видеосигнал с выхода приемопередатчика 2 проходит через электронный ключ 6 на интегратор 8 только при наличии на управляющем входе электронного ключа 6 разрешающего сигнала, поступающего в виде прямоугольного импульса с выхода генератора стробирующих импульсов 4, который синхронизируется импульсами, поступающими от синхронизатора 3. Видеосигнал на выходе приемопередатчика 2 представляет собой последовательность, состоящую из прямоугольного импульса, обусловленного просачиванием сигнала в приемный тракт РЛС при излучении зондирующего импульса, и сигнала сложной формы, обусловленного отражением от МП. Время задержки импульса tзад на выходе генератора стробирующих импульсов 4 относительно зондирующих импульсов должно быть
 ,
,
где τ - длительность зондирующего импульса;
tм - время, соответствующее «мертвой зоне» после окончания зондирующего импульса.
Блок выделения заднего фронта 7 вырабатывает прямоугольные импульсы длительностью τ7, передний фронт которого совпадает по времени с задним фронтом стробирующего импульса на выходе блока 4. Этот импульс, задержанный на время t9 в первой линии задержки 9, устанавливает в исходное (нулевое) состояние интегратор 8. Время задержки должно быть
 ,
,
где ТП - период повторения зондирующих импульсов;
τс - длительность стробирующих импульсов.
Стробирующий импульс должен перекрывать всю область отражений от МП, следовательно его длительность должна определяться из условия
 ,
,
где Dmax - максимальная дистанция от РЛС, с которой наблюдаются отражения от МП;
c - скорость света.
Дистанция Dmax зависит от типа РЛС и высоты H подъема антенны над уровнем моря. Так, например, для судовых навигационных РЛС Dmax≈4 мили при HА=15-16 м и Dmax≈7 миль при HA=30 м.
После интегрирования видеосигнала, обусловленного отражениями от МП, на выходе интегратора 8 получается напряжение, соответствующее энергии Wij радиолокационных отражений от МП при j-м зондировании в i-м азимутальном направлении, что справедливо для РЛС как с низкой, так и с высокой разрешающей способностью. За время t9 осуществляется передача сигнала от интегратора 8 через блок азимутальной селекции 10 в соответствующий азимутальный канал многоканального накопителя 12. Сигнал с выхода датчика углового положения 5 антенны поступает на один из входов компараторов 29 всех каналов блока азимутальной селекции 10 (фиг.7). На второй вход каждого из компараторов 29 подается от источников постоянного напряжения 28 сигнал, соответствующий определенному азимутальному направлению, при этом напряжение Ui на выходе источника постоянного напряжения 28i должно соответствовать азимутальному направлению
 .
.
Количество каналов в блоке азимутальной селекции 10 определяется из условия обеспечения требуемой точности.
Компараторы 29 вырабатывают сигналы только в моменты совпадения напряжения на двух входах. Эти сигналы запускают генераторы импульсов 30, вырабатывающие прямоугольные импульсы с одинаковой длительностью
 ,
,
где ω - угловая скорость вращения антенны.
Прямоугольные импульсы, поступая на программируемые счетчики 32 предыдущих каналов, передним фронтом устанавливают их в исходное (нулевое) положение, а также поступают на один из входов элементов И 31, на вторые входы которых через электронный ключ 35 блока азимутальной селекции поступают прямоугольные импульсы от блока выделения заднего фронта 7. Эти импульсы проходят через один из элементов И 31, на втором входе которого есть сигнал от генератора импульсов 30, соответствующий азимутальному положению антенны, и открывают электронный ключ 33 соответствующего канала, через который сигнал от интегратора 8 поступает в соответствующий канал многоканального накопителя 12. Электронный ключ 35 закрывается сигналом с выхода элемента ИЛИ 34 при поступлении на один из его входов сигнала от программируемого счетчика 32, который появляется после того, как на вход программируемого счетчика 32 поступит N32 импульсов. Значение

устанавливается одинаковым во всех каналах. В результате при каждом обороте антенны в канале многоканального накопителя 12, каждый из которых соответствует определенному азимутальному положению антенны, поступает одинаковое количество импульсов одинаковой длительности, амплитуда которых соответствует энергии Wij радиолокационных отражений от МП. Следует отметить, что значением N32 определяется сектор Δα усреднения для каждого азимутального направления
 .
.
Делитель частоты 11 пропускает на выход только каждый k-й импульс из поступивших на его вход (k - коэффициент деления). Импульс с выхода делителя частоты 11 задним своим фронтом запускает анализатор 22, а после задержки на время t13 во второй линии задержки 13 также задним фронтом устанавливает в исходное (нулевое) положение все каналы многоканального накопителя 12. Таким образом, в каждом канале многоканального накопителя 12 осуществляется накопление (суммирование) сигналов, соответствующих энергии радиолокационных отражений с определенного азимутального направления за k оборотов антенны. Следовательно, время измерения
 .
.
А сигналы на каждом из выходов многоканального накопителя 12 соответствуют средней энергии Wcp1, Wcp2, …, Wcpi, …, WcpN радиолокационных отражений с определенного азимутального направления α1, α2, …, αi, …, αN. Требуемое время измерения задают, устанавливая соответствующее значение коэффициента деления k в делителе 11. За время t13 задержки импульса во второй линии задержки 13 должна обеспечиваться передача массива {Wcp} из многоканального накопителя 12 в анализатор 22.
Кроме селекции энергии радиолокационных отражений по определенным азимутальным направлениям производится и селекция по дальности. Видеосигнал с выхода приемопередатчика 2 проходит через электронные ключи 15 на детекторы огибающей 16 только при наличии на управляющем входе электронного ключа 15 разрешающего сигнала, поступающего в виде прямоугольного импульса с выхода генератора стробирующих импульсов 4, который синхронизируется импульсами, поступающими от синхронизатора 3. На выходах детекторов огибающей 16 выделяется огибающая видеоимпульсов, принятых с фиксированных дальностей. При этом разность расстояний от РЛС до селектируемых участков водной поверхности определяется временем задержки строб-импульсов в линиях задержки 14.
В результате интегрирования огибающих сигналы на выходах интеграторов 18 получаются пропорциональными средней мощности радиолокационных отражений, т.е. соответственно Р1(α), Р2(α), … PN(α).
Время интегрирования определяется периодом TT следования тактовых импульсов. Результаты интегрирования запоминаются в блоках выборки-хранения аналоговой информации 20 при подаче на их управляющие входы тактовых импульсов от генератора 19. Длительность тактовых импульсов
τT<<TT.
Сигнал установки интеграторов в исходное (нулевое) положение подается с задержкой в линии 17 на время
 ,
,
необходимое для запоминания результатов интегрирования в блоках выборки-хранения 20.
С помощью масштабирующего усилителя 21, имеющего коэффициент передачи
 ,
,
обеспечивается учет различия расстояний до селектируемых участков. В формуле Dj и Di - дальность от РЛС до селектируемого участка МП выбирается из условия оптимальности для радиолокационных измерений  углов скольжения ψ1 и ψ2.
углов скольжения ψ1 и ψ2.
Блок деления 26 обеспечивает получение отношения входных сигналов от выбранных Dj и Di. Таким образом, сигнал на выходе блока 26 пропорционален отношению
 .
.
Вычислитель 25 обеспечивает вычисление среднего уклона  по поступающей от блока 26 информации об указанном отношении и введенных в него перед началом измерений углов скольжения ψ1, ψ2 и коэффициента n, определяемого поляризацией сигналов использованной РЛС, по формуле
по поступающей от блока 26 информации об указанном отношении и введенных в него перед началом измерений углов скольжения ψ1, ψ2 и коэффициента n, определяемого поляризацией сигналов использованной РЛС, по формуле
 .
.
Результат измерения среднего уклона взволнованной поверхности передается в решающее устройство 24.
В анализатор 22 поступает информация о состоянии МП по азимуту (от многоканального накопителя 12) и по дальности (от масштабирующих усилителей 21). По критерию минимума значения элементов матрицы принимается решение о наличии локального участка минимальных значений, определяется пространственная ориентация локального участка, местоположение фронта аномалии. С помощью устройства памяти 23 производится сравнение поступившей информации с усредненной накопленной информацией предыдущих обзоров. Результат оценки наличия аномалии (и ее перемещения) передается на решающее устройство. По  , направлению скорости перемещения фронта аномалии вычисляется высота полета объекта и расстояние от фронта аномалии до объекта. Выработанное решающим устройством местоположение объекта передается на устройство отображения и (или) устройство сопровождения цели.
, направлению скорости перемещения фронта аномалии вычисляется высота полета объекта и расстояние от фронта аномалии до объекта. Выработанное решающим устройством местоположение объекта передается на устройство отображения и (или) устройство сопровождения цели.
Таким образом, заявленное «Устройство определения местоположения сверхзвукового низколетящего объекта по следу на морской поверхности» является новым устройством для определения местоположения источника возникновения аномалий на взволнованной морской поверхности.
Заявленное устройство промышленно применимо, так как для его реализации используются широко распространенные компоненты и изделия промышленности, такие как сигнальные процессоры, устройства отображения радиолокационной информации с радиально-круговой разверткой, цифровые устройства памяти с произвольным доступом (многоканальные накопители), логические устройства (элементы И и ИЛИ).
Литература
1. Долгих В.Н., Казанцев Г.И. Прикладная гидрофизика. Часть 1. Гидроакустика: учебник. - Владивосток, ТОВМИ им. С.О.Макарова, 2005. - 488 с.: ил.
2. Ушаков И.Е., Шишкин И.Ф. Радиолокационное зондирование морской поверхности. - М.: РИЦ «Татьянин день», 1997. - 264 с.: ил.
3. Ушаков И.Е. Устройство для измерения характеристик поверхностного волнения. // Патент РФ №2018873, 1994.
4. Каплина М.С., Ушаков И.Е., Шишкин И.Ф., Качинский С.А., Куликов А.Ф. Способ измерения уклона взволнованной водной поверхности и устройство для его реализации. // А.с. 1349517 (СССР), 1987.
5. Морская радиолокация. / Под ред. В.И.Винокурова. - Л.: Судостроение, 1986. - 256 с.
6. Линник В.В., Сырвачев В.А. Устройство позиционирования аномалий морского волнения. // Патент РФ №65242, МПК G01S 13/00, 13/06, 13/46. - Опубликовано 27.07.2007 в бюл. №21.
7. Дремлюг В.В. Об определении некоторых элементов морских волн с помощью радиолокатора. - Труды Арктического и антарктического научно-исследовательского института, 1961. - Т.210. - Вып.1. - С.135-138.
8. Тверской Г.Н., Терентьев Г.К., Харченко И.П. Имитаторы эхо-сигналов судовых радиолокационных станций. - Л.: Судостроение, 1973. - С.122-123.





Изобретение относится к области радиолокации, в частности к обнаружению, определению местоположения и сопровождению малозаметного низколетящего над морской поверхностью со сверхзвуковой скоростью объекта. Достигаемый технический результат изобретения - определение высоты полета объекта и расстояние между объектом и фронтом аномалии морской поверхности, образованной объектом посредством псевдозвуковой волны. Для определения местоположения объекта измеряется средний уклон крупных волн морского волнения, вводится значение температуры воздуха над морской поверхностью, анализируется пространственное распределение локального участка минимальных значений отраженных радиолокационных сигналов. 1 з.п. ф-лы, 7 ил.
1. Устройство определения местоположения сверхзвукового низколетящего объекта по следу на морской поверхности, содержащее антенну, датчик углового положения антенны, соединенный с антенной приемопередатчик, синхронизатор, генератор стробирующих импульсов, блок выделения заднего фронта, блок азимутальной селекции, делитель частоты, многоканальный накопитель, анализатор для выявления минимума мощности отраженного сигнала, электронный ключ, две линии задержки, интегратор, блок обзора по дальности, решающее устройство и устройство отображения; при этом выход синхронизатора параллельно соединен с соответствующими входами приемопередатчика и генератора стробирующих импульсов; выход делителя частоты соединен с управляющим входом анализатора, а через вторую линию задержки соединен с входом сброса многоканального накопителя, каждый выход которого подключен к соответствующему входу анализатора; электронный ключ устройства включен между выходом приемопередатчика и входом интегратора, а его управляющий вход соединен с генератором стробирующих импульсов, который через блок выделения заднего фронта и первую линию задержки соединен с входом сброса интегратора; устройство отображения через решающее устройство подключено к выходу анализатора; блок азимутальной селекции содержит N каналов азимута, каждый из которых содержит последовательно соединенные между собой источник постоянного напряжения, компаратор, генератор импульсов, элемент И, счетчик, а также электронный ключ, управляющий вход которого соединен с выходом элемента И; информационные входы электронных ключей всех каналов блока азимутальной селекции объединены и соединены с выходом интегратора, а выход каждого электронного ключа соединен с соответствующим входом многоканального накопителя; блок азимутальной селекции содержит элемент ИЛИ, у которого N входов соединены с соответствующими выходами счетчиков каналов азимута; вход сброса каждого счетчика блока азимутальной селекции соединен с выходом соответствующего генератора импульсов последующего канала (вход сброса последнего счетчика соединен с выходом первого генератора импульсов); выход элемента ИЛИ блока азимутальной селекции соединен с управляющим входом N+1-го электронного ключа блока азимутальной селекции, информационный вход которого, являющийся входом блока азимутальной селекции, подключен к выходу блока выделения заднего фронта, а выход этого ключа подключен к объединенным вторым входам элементов И всех каналов; выход генератора импульсов N-го канала, являющийся выходом блока азимутальной селекции, соединен с входом делителя частоты, а объединенные вторые входы компараторов всех каналов блока азимутальной селекции соединены с датчиком углового положения антенны, отличающееся тем, что устройство дополнительно содержит блок деления, вычислитель среднего уклона волн; устройство памяти; информационные входы блока обзора по дальности объединены и соединены с выходом приемопередатчика; вторые входы блока обзора по дальности соединены с генератором стробирующих импульсов; информация с блока обзора по дальности поступает в анализатор, где по результату сравнения между собой элементов двумерной матрицы по критерию минимума значения элементов матрицы принимается решение о наличии локального участка минимальных значений, определяется местоположение фронта аномалии; в анализаторе производится сравнение полученной за обзор информации с усредненной накопленной информацией предыдущих обзоров, сохраняемой в устройстве памяти; с двух выходов блока обзора по дальности (выходы выбираются по условию оптимальности углов скольжения излучения радиолокатора для измерения уклона волн морской поверхности) информация поступает на блок деления, от блока деления информация поступает на вычислитель среднего уклона крупных волн морской поверхности, где по известным углам скольжения излучения радиолокатора и коэффициенту, определяемому поляризацией сигналов радиолокатора, вычисляется средний уклон, а результат передается в решающее устройство; в устройство памяти записывается информация о температуре воздуха над морской поверхностью, которая затем при каждом вычислении поступает в решающее устройство; из решающего устройства в устройство памяти записывается результат вычисления высоты полета объекта и расстояние от него до фронта аномалии, который затем для сравнения со следующим результатом поступает в решающее устройство.
2. Устройство по п.1, отличающееся тем, что информация с решающего устройство поступает в блок сопровождения цели.
| Приспособление к трепальным и т.п. маши нам для увлажнения холстов | 1941 |
|
SU65242A1 |
| СПОСОБ РЕГИСТРАЦИИ ПОВЕРХНОСТНЫХ ПРОЯВЛЕНИЙ ВНУТРЕННИХ ВОЛН, ГЕНЕРИРУЕМЫХ ДВИЖУЩИМСЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2003 |
|
RU2261458C2 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОБЪЕКТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ В РАДИОЛОКАТОРЕ С СИНТЕЗИРОВАННОЙ АПЕРАТУРОЙ АНТЕННЫ | 1994 |
|
RU2101727C1 |
| US 3765768 A, 16.10.1973 | |||
| JP 56143974 A, 10.11.1981 | |||
| JP 2009229422 A, 08.10.2009. | |||

