Изобретение относится к машиностроению и может быть использовано при разработке узлов кулачковых механизмов.
Известен способ [1] осуществления движения ведомого звена кулачкового механизма, заключающийся в преобразовании движения ведущего звена в заданную траекторию движения сопряженного с ним ведомого звена, при этом обеспечивают сопряжение ведущего звена с ведомым в соответствии с зависимостью:
для участка подъема:
S(t) = S -
-  sin2
sin2 ; tи≥t≥0;
; tи≥t≥0;
для участка опускания:
S(t) = S 1 -
1 -  -
-  sin2
sin2 1 -
1 -  ; tи≥t≥0 где S(t) - функция перемещения ведомого звена во временной форме;
; tи≥t≥0 где S(t) - функция перемещения ведомого звена во временной форме;
Sn - полное перемещение ведомого звена на рассматриваемом интервале;
t - текущее время;
tи - время рассматриваемого интервала.
Недостатком данного способа является высокая виброактивность ведомого звена при движении его по данному закону.
Наиболее близким по технической сущности к изобретению является способ осуществления движения ведомого звена кулачкового механизма, заключающийся в преобразовании движения ведущего звена в заданную траекторию движения сопряженного с ним ведомого звена, при этом обеспечивают сопряжение ведущего звена с ведомым в соответствии с зависимостью:
для участка подъема:
S(t) = S 1 - cos
1 - cos -
-  1 - cos2
1 - cos2 ; tи≥t≥0
; tи≥t≥0
для участка опускания:
S(t) = S 1 - cos
1 - cos 1-
1-  -
-  1 - cos2Π(t-tи)
1 - cos2Π(t-tи) ; tи≥t≥0
; tи≥t≥0
Недостатком данного способа является высокая виброактивность ведомого звена при движении его по данному закону.
Цель изобретения - улучшение механических характеристик за счет уменьшения потерь энергии на вибрацию.
Это достигается тем, что в известном способе осуществления движения ведущего звена в заданную траекторию сопряженного с ним ведомого звена путем изменения движения точки сопряжения ведущего и ведомого звеньев обеспечивают перемещение ведомого звена по заданной траектории в соответствии с зависимостью во времени:
S(t) = Sne

 + tи≥ t ≥
+ tи≥ t ≥  - t
- t где S(t) - функция перемещения во времени ведомого звена в кулачковом механизме;
где S(t) - функция перемещения во времени ведомого звена в кулачковом механизме;
Sn - полное перемещение ведомого звена по заданной траектории рассматриваемого интервала;
α - коэффициент формы, определяемый из выражения:
α2=  ln
ln  Δ ≅
Δ ≅  Ra где Rа - среднее арифметическое отклонение профиля поверхности кулачка на участке выстоя;
Ra где Rа - среднее арифметическое отклонение профиля поверхности кулачка на участке выстоя;
Тц - период замкнутого цикла осуществления перемещения ведомого звена;
ωк - угловая частота вращения кулачка;
t - текущее время;
tи - время рассматриваемого интервала;
ϕn - угол поворота кулачка за интервал движения.
Спектр ускорения предложенной зависимости движения ведомого звена более узкий, чем известные. Это позволяет снизить вибрацию кулачкового механизма в высокочастотной области спектра, что повышает плавность работы данного механизма, поскольку отклонения движения ведомого звена от наперед заданного будут минимальными из-за отсутствия фазового сдвига между ведущим и ведомым звеньями, что проявляется в области резонанса.
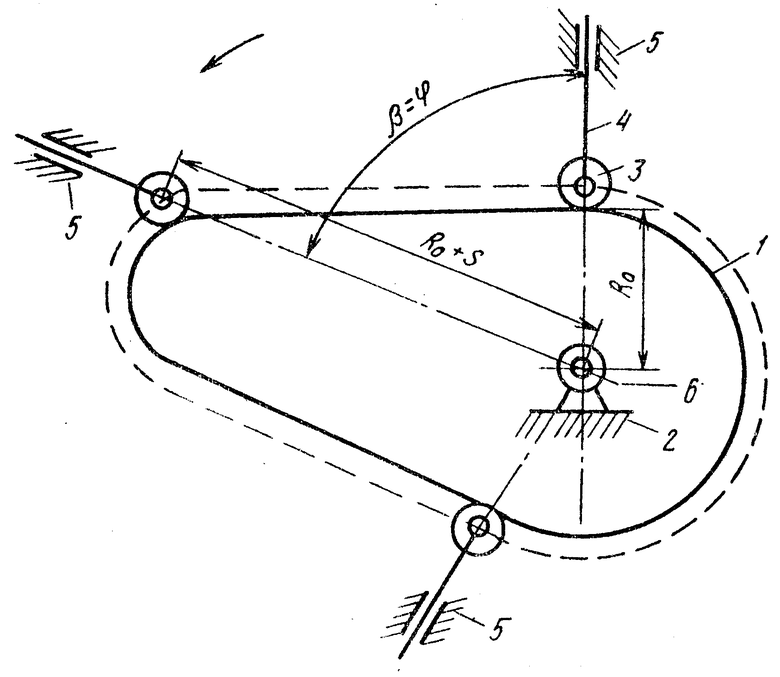
В качестве примера способа осуществления движения ведомого звена кулачкового механизма рассматривается решение задачи по определению практического профиля кулачка для трехзвенного кулачкового механизма с дисковым вращающимся кулачком с центральным поступательно движущимся толкателем.
На чертеже показан профиль дискового вращающегося кулачка, где 1 - практический профиль кулачка, 2 - стойка, 3 - ролик кулачка, 4 - толкатель, 5 - направляющая толкателя, 6 - ось кулачка.
Для дисковых вращающихся кулачков уравнения профиля удобнее выражать в полярных координатах, принимая за начало координат центр вращения кулачка и отсчитывая полярные углы от начального радиуса-вектора Rо. Радиусы векторы кулачка обозначим R, углы центрового профиля β . При отсутствии смещения углы центрового профиля β равны углам поворота кулачка ϕ, а разность между двумя соседними радиусами-векторами - пройденному пути ведомого звена.
R = Ro+ Sne
При этом зависимость S = S(ϕ ) предлагается в виде, определяемом предложенной зависимостью, выраженной в функции угла поворота кулачка ϕ . Принимая во внимание, что ось Х направлена по начальному радиусу-вектору, а также, что:
Х = Rcos ϕ ; Y = Rsinϕ ;
X′ =  = -Rsinϕ+cos
= -Rsinϕ+cos ;
;
ΨY′ =  = Rcosϕ+sin
= Rcosϕ+sin , где
, где  =
=  =
= 
В результате преобразований получают
Xn= Rcosϕ ∓ r
Yn= Rsinϕ ∓ r где δ = 2
где δ = 2 - K
- K e
e


rр - радиус ролика.
Вычисление координат Хn и Yn позволяет определить полярные координаты Rn и βn практического профиля кулачка
Rn=  ; tgβn=
; tgβn=  ;
;
Изобретение относится к машиностроению и может быть использовано при разработке кулачковых механизмов. Целью способа является улучшение механических характеристик за счет уменьшения потерь энергии на вибрацию. Способ заключается в том, что при преобразовании движения ведущего звена в заданную траекторию движения сопряженного с ним ведомого звена реализуют указанную в ф-ле зависимость перемещения ведомого звена. 1 ил.
СПОСОБ ОСУЩЕСТВЛЕНИЯ ДВИЖЕНИЯ ВЕДОМОГО ЗВЕНА КУЛАЧКОВОГО МЕХАНИЗМА, заключающийся в преобразовании движения ведущего звена в заданную траекторию движения сопряженного с ним ведомого звена, отличающийся тем, что, с целью улучшения механических характеристик за счет уменьшения потерь энергии на вибрацию, путем изменения движения точки сопряжения ведущего и ведомого звеньев обеспечивают перемещение ведомого звена по заданной траектории в соответствии с зависимостью во времени
S(t) = Sne

 + tn≥ t ≥
+ tn≥ t ≥  - t
- t ,
,
где St - функция перемещения во времени ведомого звена в кулачковом механизме;
Sn - полное перемещение ведомого звена по заданной траектории рассматриваемого интервала;
α - коэффициент формы, определяемый из выражения
α2=  ln
ln  , Δ ≅
, Δ ≅  Ra,
Ra,
Ra - среднее арифметическое отклонение профиля поверхности кулачка на участке выстоя;
Tц - период замкнутого цикла осуществления перемещения ведомого звена;
ωк - угловая частота вращения кулачка;
t - текущее время;
tn - время рассматриваемого интервала;
ϕn - угол поворота кулачка за интервал движения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Левитский Н.И | |||
| Кулачковые механизмы | |||
| М.: Машиностроение, 1964, с.152. | |||
