Изобретение относится к приборостроению, в частности к электроизмерительной технике, и может быть использовано в тензо- и термометрии для измерения сигналов тензо- и термодатчиков.
Известен регистратор (система "Прочность"), предназначенный для автоматизации процессов измерения, сбора и обработки информации преобразователей различных величин, характеризующих тепловое, деформационное и напряженное состояние конструкций. Система состоит из нескольких измерительных подсистем (четырех) с двумя измерительными каналами каждая, устройства управления и обмена и ЭВМ. Измерительные сигналы в каждом канале через коммутаторы поступают на измерительный модуль, представляющий собой преобразователь сигналов датчиков в напряжение и АЦП на выходе, цифровые сигналы которого поступают через информационную шину цифровой части системы в ЭВМ. Поскольку получение цифрового результата измерения в АЦП (уравновешивание) проходит при совместной работе преобразователя сигналов датчиков, датчиков и линий связи, получение результата измерения требует большого времени из-за неизбежных переходных процессов, связанных с уравновешиванием измерительной цепи.
Наиболее близкой по технической сущности и достигаемому эффекту является система "Ресурс 23/27", состоящая из восьми нормализаторов с соответствующими коммутаторами на входе и блоком АЦП на выходе. Для формирования временной диаграммы управления работой системы имеется тактовый генератор и один общий формирователь управления нормализаторами на их управляющих входах. Результаты измерения из блока АЦП поступают в ЭВМ. Блок АЦП с восемью аналоговыми входами и одним цифровым выходом представляет собой многоканальный АЦП. ЭВМ, осуществляющая цифровое управление коммутаторами и принимающая цифровые результаты измерения (данные), по существу выполняемых функций является цифровым устройством управления и приема данных, которое может быть реализовано не только ЭВМ как таковой, а и микропроцессорами, цифровыми автоматами, цифровыми регистраторами и т.д. В этой системе существенно увеличено быстродействие за счет введения нормализаторов, не требующих участия в аналого-цифровом преобразовании сигналов датчиков. Однако для ряда задач (например, ресурсные испытания конструкций с количеством входов системы, достигающим тысяч и даже десятков тысяч) общее время измерения сигналов со всех входов оказывается значительным. Пусть D- число входов, подключенных через коммутатор к одному нормализатору. Тогда общее время измерения системой всех входных сигналов определится выражением
Т=D(Тпуск+Тк+Тн+Тацп+Тприем+Твозврат)
или
Т=DТн+D(Тпуск+Тк+Тацп+Тприем+Твозврат), где Тпуск - время прохождения команды "Пуск" до ее исполнения; Тк - временная задержка для установления режима ключевых элементов коммутаторов; Тн - время нормализации сигналов в нормализаторе; Тацп - время работы АЦП; Тприем - время приема результатов измерения; Твозврат - время возврата системы на исходную позицию, n - число каналов нормализации (число нормализаторов) системы.
К недостаткам следует отнести СТАРТ/СТОП-й режим работы нормализаторов, отрицательно сказывающийся на точности результатов нормализации из-за неритмичности запуска нормализаторов. Построение блока АЦП (многоканального АЦП) из восьми отдельных АЦП добавляет в результаты измерения дополнительную погрешность из-за неидентичности точностных характеристик отдельных АЦП и существенно усложняет и удорожает конструкцию системы, уменьшая, кроме того, ее надежность и увеличивая затраты на метрологическое обеспечение. Управление коммутаторами осуществляется от ЭВМ через единый регистр команд для всех нормализаторов параллельно, что не позволяет измерять одновременно сигналы различных входов для разных нормализаторов.
Целью изобретения является расширение функциональных возможностей, повышение быстродействия, точности и надежности регистратора.
Цель достигается тем, что в многоканальный регистратор, содержащий тактовый генератор, многоканальный аналого-цифровой преобразователь с последовательно соединенными коммутатором и нормализатором на каждом входе, цифровое устройство управления и приема данных на выходе, регистр команд, подключенный к управляющему входу одного из коммутаторов, и формирователь управления нормализаторами, подключенный выходом к управляющим входам нормализаторов, введены дополнительные регистры команд, подключенные к управляющим входам остальных коммутаторов, счетчик-делитель, запоминающее устройство команд, блок синхронизации, соединенный первым синхровходом с выходом деления счетчика-делителя, а вторым - с выходом конца преобразования аналого-цифрового преобразователя, вход запуска которого соединен с выходом тактового генератора и входом счетчика-делителя, счетный выход которого соединен с управляющим входом аналого-цифрового преобразователя, а выход деления - с входами записи регистров команд, информационные входы которых соединены с выходами запоминающего устройства команд, входы команд и стробирования которого соединены соответственно с выходами команд и стробирования команд цифрового устройства управления и приема данных, управляющий вход команд и управляющий вход данных которого соединены с выходом готовности команд и выходом готовности данных блока синхронизации соответственно, вход формирователя управления нормализаторами подключен к выходу деления, либо счетному выходу счетчика-делителя, блок синхронизации состоит из двух одновибраторов, вход и выход одного из которых являются первым синхровходом и выходом готовности команд, вход и выход другого - вторым синхровходом и выходом готовности данных блока синхронизации; блок синхронизации состоит из RS-триггера, сдвигового регистра и трех D-триггеров, выходы первого D-триггера, регистра, RS-триггера соединены соответственно с D-входами второго и третьего D-триггеров и регистра, причем первым синхровходом блока синхронизации являются объединенные S-входы первого и второго D-триггеров, R-вход RS-триггера и С-вход регистра, входом сброса готовности команд - R-входы первого и второго D-триггеров и S-вход RS-триггера, вторым синхровходом, входом сброса готовности данных, выходами готовности команд и данных блока синхронизации являются соответственно объединенные С-входы D-триггеров, R-вход третьего D-триггера, выходы второго и третьего D-триггеров, D-вход первого D-триггера соединен с шиной нулевого сигнала, а входы сброса готовностей команд и данных блока синхронизации соединены с выходами стробирования команд и данных цифрового устройства управления и приема данных.
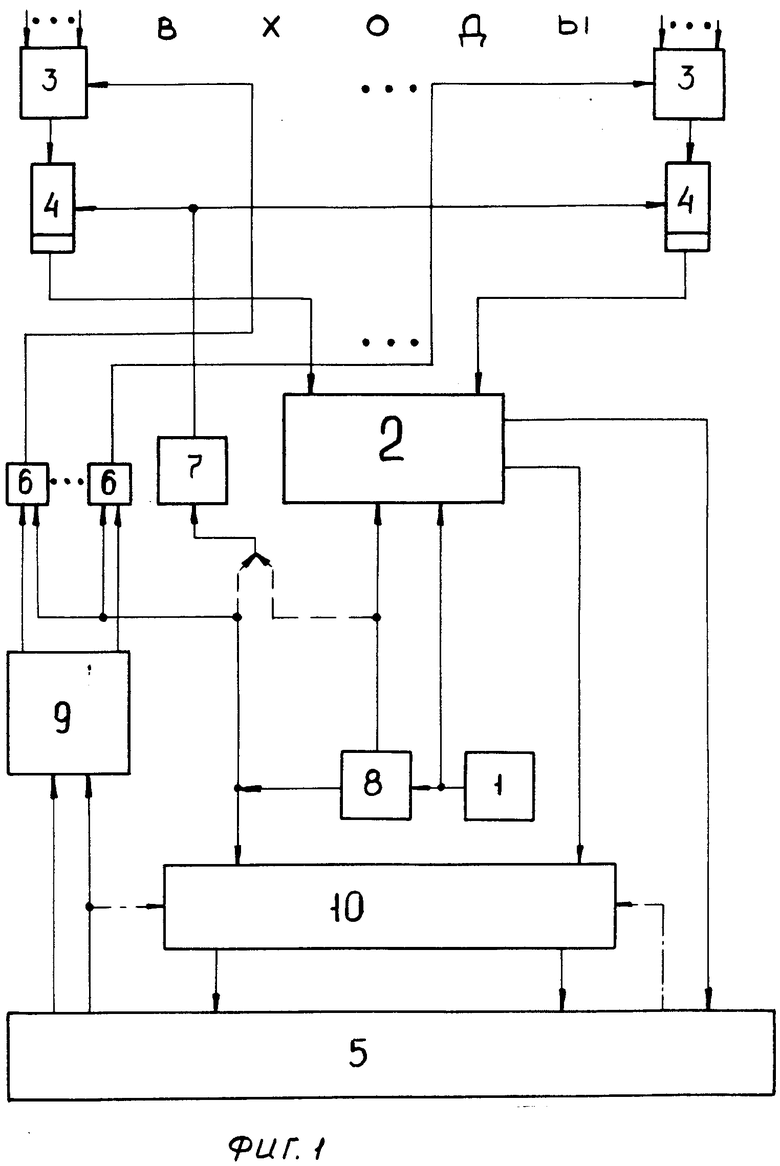
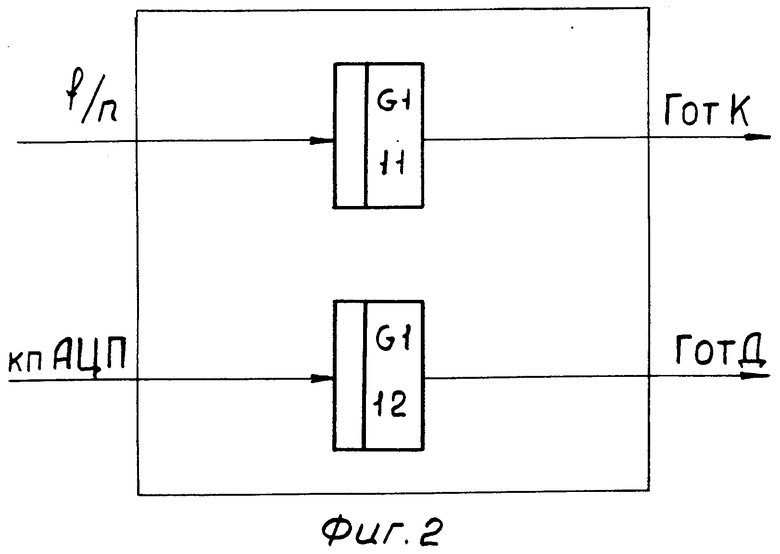
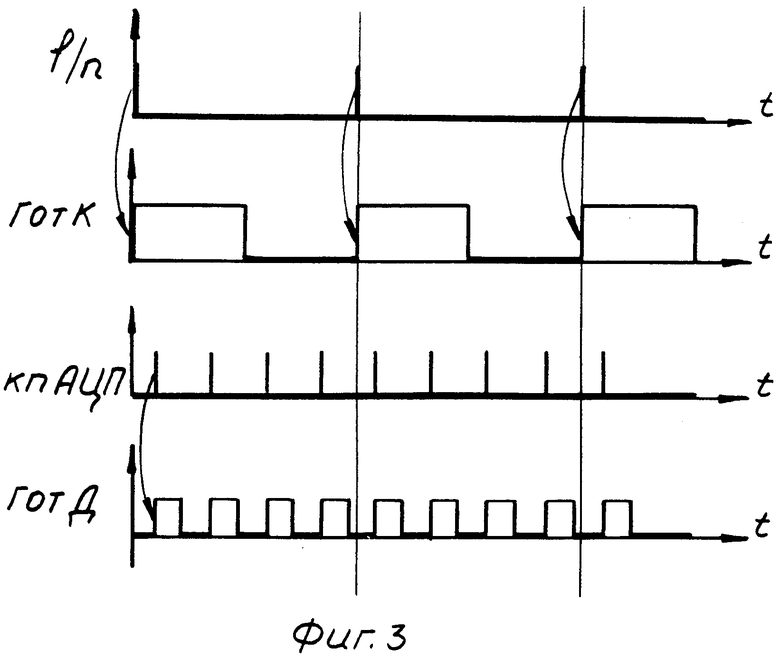
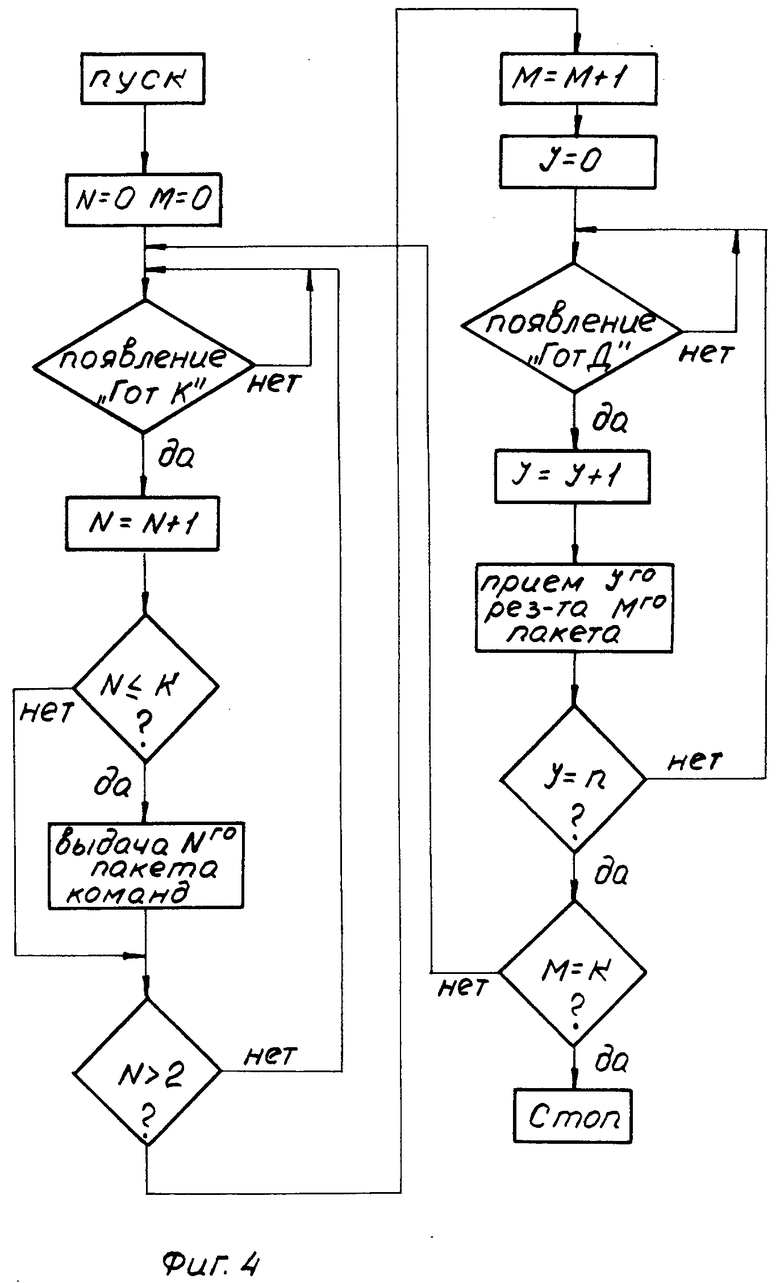
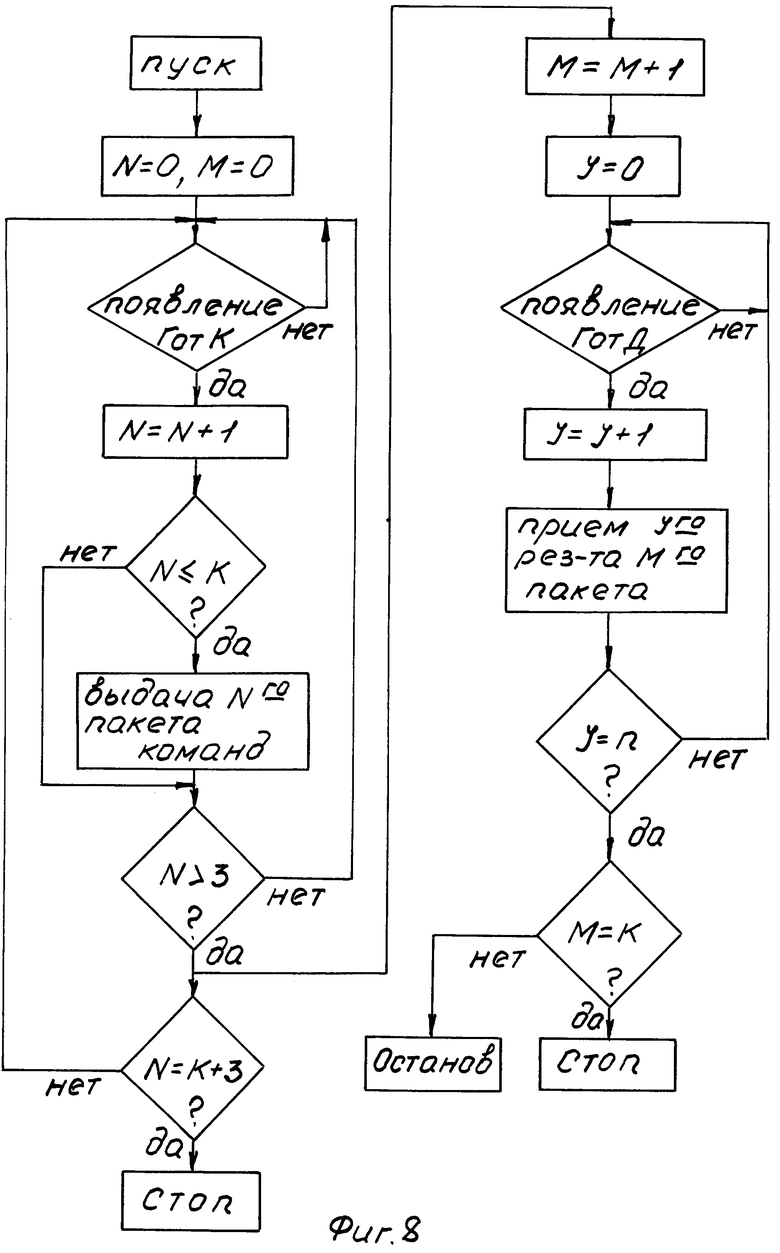
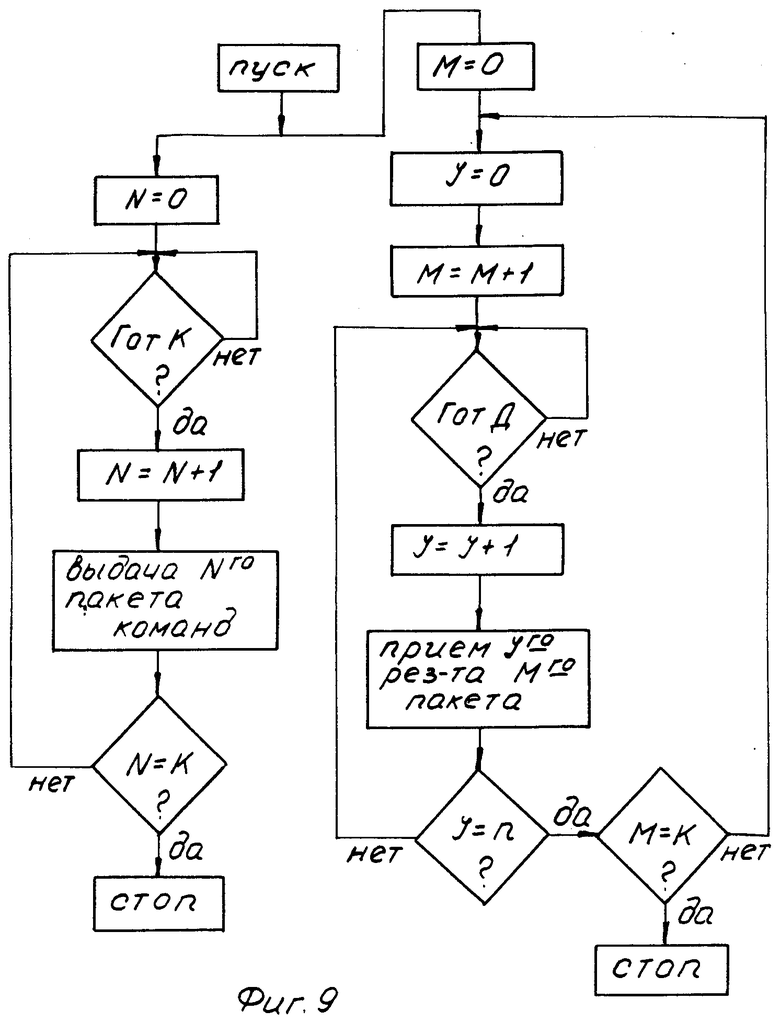
На фиг. 1 представлена схема заявляемого регистратора; на фиг. 2, 3 и 4 - схема и временная диаграмма работы блока синхронизации, выполненного на базе одновибраторов, и соответствующий алгоритм работы цифрового устройства управления и приема данных; на фиг. 5, 6 и 7 - схема, временная диаграмма работы блока синхронизации, построенного на базе триггеров, и соответствующий алгоритм работы цифрового устройства управления и приема данных; на фиг. 8 и 9 - модификации алгоритмов работы цифрового устройства управления и приема данных при построении его в виде двух независимых устройств (цифрового устройства управления и цифрового устройства приема данных) для указанных вариантов выполнения блока синхронизации.
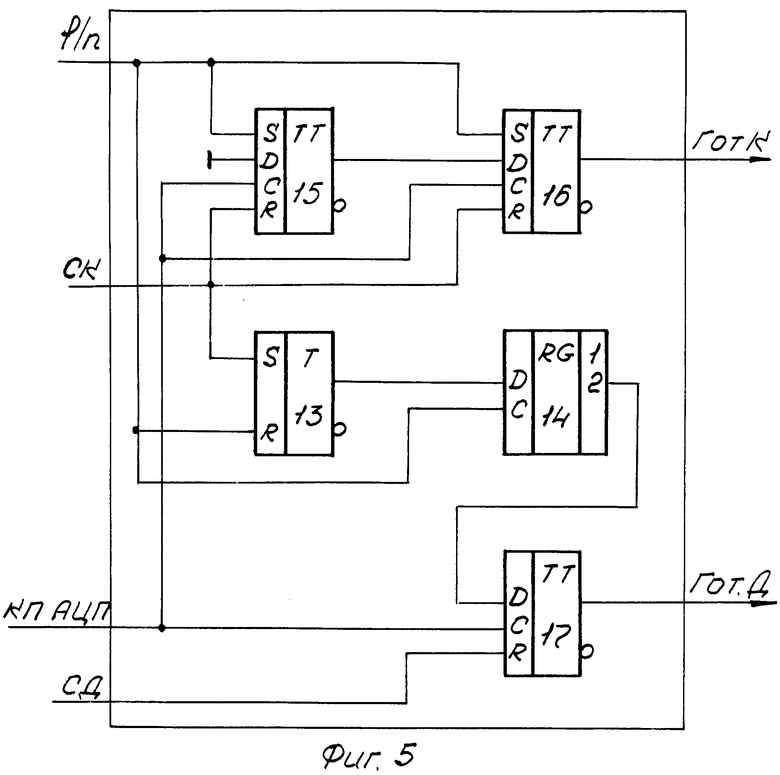
Многоканальный регистратор содержит тактовый генератор 1, многоканальный аналого-цифровой преобразователь 2 с последовательно соединенными коммутатором 3 и нормализатором 4 на каждом входе, цифровое устройство 5 управления и приема данных на выходе, регистр 6 команд, подключенный к управляющему входу одного из коммутаторов 3, и формирователь 7 управления нормализаторами 4, подключенный выходом к управляющим входам нормализаторов 4, дополнительные регистры 6 команд, подключенные к управляющим входам остальных коммутаторов 3, счетчик-делитель 8, запоминающее устройство 9 команд, блок 10 синхронизации, соединенный первым синхровходом с выходом деления счетчика-делителя 8, а вторым - с выходом конца преобразования аналого-цифрового преобразователя 2, вход запуска которого соединен с выходом тактового генератора 1 и входом счетчика-делителя 8, счетный выход которого соединен с управляющим входом аналого-цифрового преобразователя 2, а выход деления - с входами записи регистров 6 команд, информационные входы которых соединены с выходами запоминающего устройства 9 команд, входы команд и стробирования которого соединены соответственно с выходами команд и стробирования команд цифрового устройства 5 управления и приема данных, управляющий вход команд и управляющий вход данных которого соединены с выходом готовности команд и выходом готовности данных блока 10 синхронизации соответственно, вход формирователя 7 управления нормализаторами 4 подключен к выходу деления, либо счетному выходу счетчика-делителя 8, а информационный выход АЦП 10 подключен к информационному входу устройства 5 управления и приема данных. Блок 10 синхронизации состоит из двух одновибраторов 11 и 12, вход и выход одного из которых являются первым синхровходом и выходом готовности команд, вход и выход другого - вторым синхровходом и выходом готовности данных блока 10 синхронизации. Блок 10 синхронизации в другом исполнении состоит из RS-триггера 13, регистра 14, D-триггеров 15-17, выходы первого D-триггера 15, регистра 14, RS-триггера 13 соединены соответственно с D-входами второго 16 и третьего 17 D-триггеров и регистра 14, причем первым синхровходом блока 10 синхронизации являются объединенные S-входы первого 15 и второго 16 D-триггеров, R-вход RS-триггера 13 и С-вход регистра 14, входом сброса готовности команд - R-входы первого 15 и второго 16 D-триггеров и S-вход RS-триггера 13, вторым синхровходом, входом сброса готовности данных, выходами готовностей команд и данных блока 10 синхронизации являются соответственно объединенные С-входы D-триггеров 15-17, R-вход третьего D-триггера 17, выходы второго 16 и третьего 17 D-триггеров, D-вход первого D-триггера 15 соединен с шиной нулевого сигнала, а входы сброса готовностей команд и данных блока 10 синхронизации соединены с выходами стробирования команд и данных цифрового устройства 5 управления и приема данных.
Регистратор работает следующим образом.
Генератор 1 вырабатывает тактовые сигналы f регистратора, поступающие на счетчик-делитель 8 с коэффициентом деления (счета) n, равным числу нормализаторов 4 регистратора (фиг. 1). Счетчик-делитель 8 считает тактовые сигналы f и выдает на выходе деления сигнал f/n цикла нормализации через каждые n тактовых сигналов f, а на счетном выходе - кодовый или дешифрированный эквивалент числа считаемых тактовых сигналов f. АЦП 2 запускается каждым тактовым сигналом f, а через управляющий вход последовательно в соответствии с сигналами со счетного выхода счетчика-делителя 8 подключает информационные входы для аналого-цифрового преобразования сигналов нормализаторов 4 с цикличностью, равной циклу нормализации (время преобразования нормализаторов 4). Все нормализаторы 4 работают параллельно по управляющим сигналам формирователя 7 управления нормализаторами 4, запускаются синхронно с сигналом f/n цикла нормализации и по окончании его в следующем цикле имеют на своих устройствах выходной аналоговой памяти соответствующие результаты предыдущего цикла нормализации. Цифровые результаты (данные) появляются на выходе АЦП 2 последовательно в соответствии с переключением его входов, т.е. расположением нормализаторов. Сигналы на выходе конца преобразования АЦП 2 определяют моменты появления соответствующих цифровых результатов (данных). Прием результатов от АЦП 2 осуществляется цифровым устройством 5 последовательно по сигналам на управляющем входе данных. Запоминающее устройство 9 команд имеет для команд один вход и n выходов. Входные командные цифровые сигналы поступают из устройства 5 в запоминающее устройство 9 последовательно и имеют адресную часть, в соответствии с которой происходит запись и выдача на соответствующие выходы соответствующих командных сигналов, которые хранятся до поступления новых. Командные сигналы поступают на входы регистров 6 в соответствии с выходами запоминающего устройства 9, переписываются в регистры 6 по сигналам f/n цикла нормализации с выхода деления счетчика-делителя 8 и поступают на управляющие входы коммутаторов 3, в соответствии с чем и происходит подключение входов системы к нормализаторам 4. Таким образом, подключение коммутаторами 3 входов к нормализаторам 4 в соответствии с командами, имеющимися на выходе запоминающего устройства 9, нормализация входных сигналов, аналого-цифровое преобразование и подача цифровых результатов на вход цифрового устройства 5 управления и приема данных происходят циклически, безостановочно, синхронно с работой генератора 1 и счетчика-делителя 8 независимо от работы цифрового устройства 5 управления и приема данных. Устройство 5 выдает пакет последовательных команд непосредственно после каждого появления сигнала на его управляющем входе команд, а принимает данные последовательно (по одному) после каждого появления сигнала на его управляющем входе данных. Соответствие пакетов команд и данных и их состава осуществляется в цифровом устройстве 5 управления и приема данных путем сопоставления последовательности исходно установленных команд с последовательностью принятых данных. Выдача каждой команды и, как правило, прием каждого результата соответственно в цифровом устройстве 5 сопровождаются стробирующим сигналом на выходах стробирования. Сигналы управления для цифрового устройства 5 вырабатываются блоком 10 синхронизации, исходным сигналом для работы которого является сигнал цикла нормализации на его синхровходе.
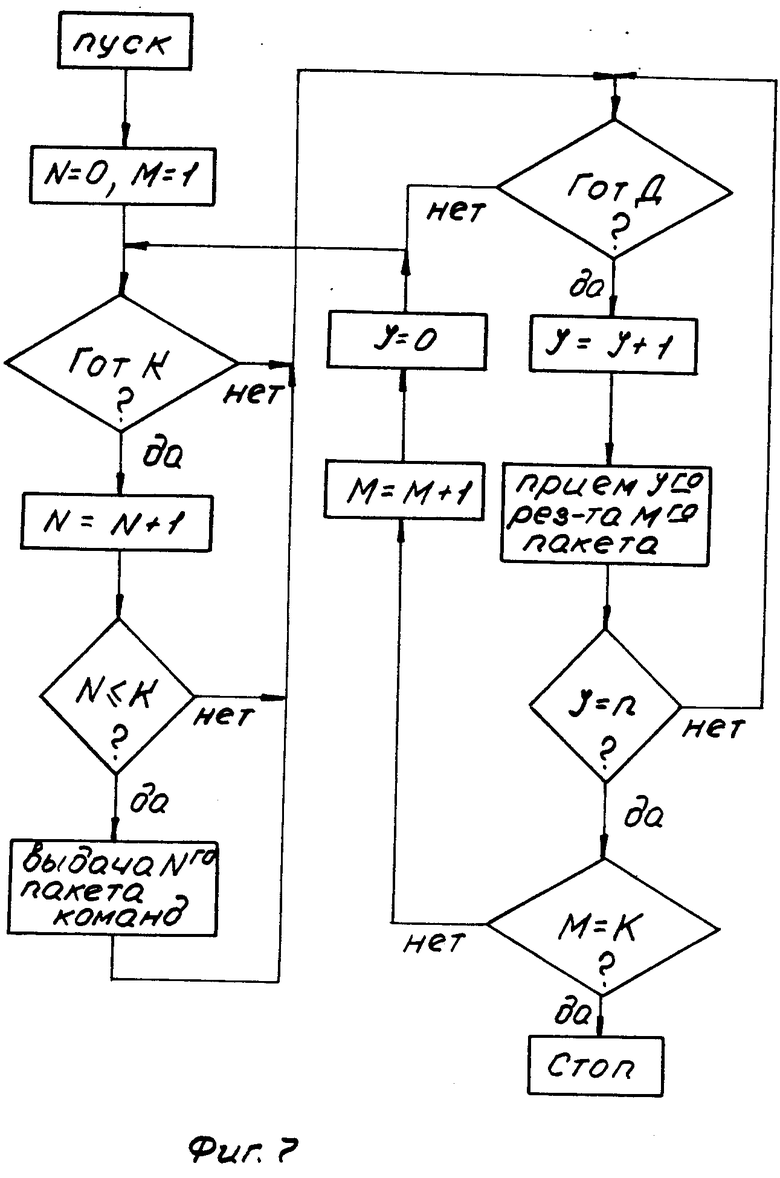
Алгоритм работы приемника 4 данных показан на фиг. 7. Перед пуском системы в устройстве 5 устанавливают К пакетов по n команд и отводят место для такого же числа результатов. С пуском системы числа N и М счетчиков циклов в устройстве 5 устанавливаются в исходное состояние ( N =О, М=1) и устройство приступает к анализу наличия сигнала "ГотК". Если для анализируемого момента времени "ГотК" нет, происходит переход на анализ сигнала "ГотД", если "ГотК" есть, число N соответствующего счетчика увеличивается на 1, после чего проверяется условие N<К, означающее, имеются ли еще не выполненные команды в объеме установленных перед пуском в устройстве 5. Если "Да", то на выход выдается N-й пакет команд; если "Нет" - выдача пропускается. Затем (или на начальном этапе перехода от анализа "ГотК" при "Нет") проводится анализ сигнала "ГотД". Если сигнала "ГотД" нет, происходит переход на исходную позицию анализа "ГотК"; если "Да", число соответствующего счетчика увеличивается на 1 (I=I+1) и устройством 5 проводится прием I-го результата М-го пакета результатов с выхода АЦП 2. Далее проверяется условие I=n, означающее, "выведен ли последний (n-й) результат данного пакета или нет". Если "Нет" - возврат на анализ "ГотД", если "Да", проверяется условие М= К, означающее, "выведен ли последний (К-й) пакет результатов или нет". Если "Нет" - возврат на исходную позицию анализа сигнала "ГотК" через операторы М=М+1 и I=0, если "Да" - СТОП.
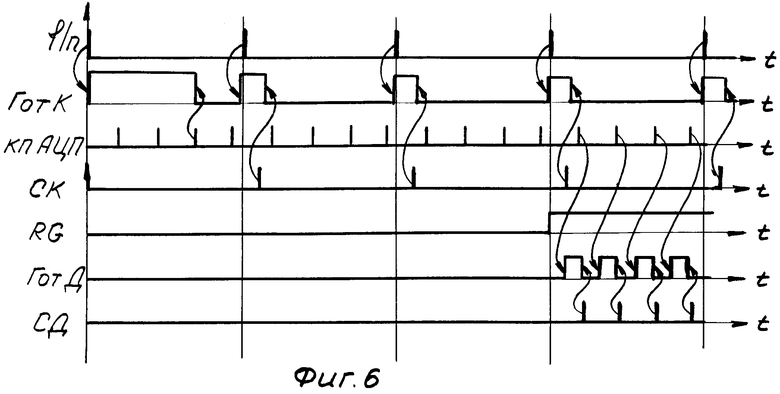
Рассмотрим работу блока 10 синхронизации по фиг. 5 и 6. Сигналом f/n цикла нормализации в триггеры 15 и 16 записывается "1" (появляется сигнал "ГотК"), в сдвиговый регистр 14 - состояние триггера 13, в триггер 13 - "0". При передаче команд в системе сигналом "СК" сброса готовности команд в триггеры 15 и 16 записывается "0" (снимается "ГотК"), в триггер 13 - "1", которая сигналами f/n сдвигается на два цикла нормализации и подается на триггер 17 для формирования сигнала "ГотД" в момент появления каждого сигнала КП АЦП. При приеме данных сигналом СД сброса готовности данных триггер 17 устанавливается в состояние "0" (снимается "ГотД"). В отсутствии передачи команд триггеры 15 и 16 (установленные сигналом f/n в состояние "1") сигналами (соответственно первым и вторым) устанавливаются в "0" (снимается "ГотК"). Триггер 13 устанавливается в "1" сигналом "СК", а очередным сигналом f/n сбрасывается в "0".
В качестве многоканального АЦП 2 в системе может быть использован один АЦП с аналоговым коммутатором входов, либо АЦП с цифровым коммутатором на выходе. Известны стандартные счетчики-делители, например микросхема 564ИЕ11. В системе используются известные запоминающие устройства. В качестве цифрового устройства 5 управления и приема данных могут быть использованы микропроцессоры, мини- и микроЭВМ или специальные цифровые автоматы. Рассмотренный вариант алгоритмов предназначен для использования одной общей ЭВМ для выполнения функции управления и приема данных: через выходной регистр ЭВМ - передача команд, через входной регистр - прием данных, через регистр команд и состояний - принятие сигналов готовностей. Возможен вариант выполнения цифрового устройства 5 управления и приема данных в виде двух отдельных устройств: программатора команд и приемника данных (регистратора) с соответствующими функциями, в качестве которых могут быть использованы микропроцессоpы, цифровые автоматы и отдельные ЭВМ. На фиг. 8 и 9 приведены для этого случая соответствующие алгоритмы, аналогичные рассмотренным, где левая часть соответствует программатору команд, правая - приемнику данных. Пакет команд может состоять как из n различных команд, так и одной общей, адресная часть которой должна разрешать выдачу этой команды сразу на все выходы одновременно. В заявке описаны: простейший вариант выполнения блока 10 синхронизации с использованием одновибраторов и полный - на триггерах со сбросами готовностей. Возможны и промежуточные смешанные комбинации: одна - готовность на одновибраторе, другая - на триггере (может быть со сбросом готовности или без). Для случаев, когда стробирующие сигналы не используются для сбросов готовностей, в алгоритмах должен присутствовать для сигналов готовностей анализ их "появления"; если используются, то анализ их "наличия". Формирователь 7 управления нормализаторами 4 выполняет задачу выработки необходимых сигналов функционирования нормализаторов 4. Конкретное исполнение его зависит от принципа, заложенного в работу нормализаторов 4; может быть использован известный формирователь 7, например, как в прототипе. Главным является то, что на вход его должен быть подан сигнал, позволяющий синхронизировать работу нормализаторов 4 с работой счетчика-делителя 8, чтобы обеспечить циклическую работу нормализаторов 4 синхронно с рассмотренными ранее блоками.
Изобретение обладает существенно большим быстродействием. Постоянный циклический режим работы нормализаторов и АЦП положительно сказывается на точности результатов измерения за счет улучшения их повторяемости. Возможность построения АЦП с коммутатором на входе устраняет погрешности из-за неидентичности аналого-цифрового преобразования для разных нормализаторов, существенно упрощает и удешевляет конструкцию системы, увеличивая, кроме того, ее надежность и уменьшая затраты на метрологическое обеспечение. Управление коммутаторами через свои регистры позволяет расширить функциональные возможности регистратора за счет возможности измерения одновременно сигналов различных входов для различных нормализаторов. Все это выгодно отличает данное техническое решение от ранее известных.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ РЕГИСТРАТОР | 1990 |
|
RU2020424C1 |
| МНОГОКАНАЛЬНЫЙ РЕГИСТРАТОР | 1990 |
|
RU2020420C1 |
| МНОГОКАНАЛЬНЫЙ РЕГИСТРАТОР | 1990 |
|
RU2020421C1 |
| МНОГОКАНАЛЬНЫЙ РЕГИСТРАТОР | 1990 |
|
RU2020423C1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2004 |
|
RU2253842C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1996 |
|
RU2097703C1 |
| Измерительная система с автоматическим контролем аналого-цифрового преобразования и блок задания нечувствительности | 1991 |
|
SU1837261A1 |
| Устройство для голосования и счетчик со случайным порядком счета Ордынцева | 1990 |
|
SU1751792A1 |
| ИЗМЕРИТЕЛЬ ЧАСТОТЫ | 1989 |
|
RU2018173C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ С КАНАЛАМИ СВЯЗИ | 1990 |
|
RU2020565C1 |
Изобретение относится к приборостроению, в частности к электроизмерительной технике. Цель - повышение быстродействия, точности и надежности. Регистратор состоит из тактового генератора, многоканального АЦП с последовательно соединенными коммутатором и нормализатором на каждом входе с цифровым устройством управления и приема данных на выходе, регистров команд на управляющих входах коммутаторов, формирователя управления нормализаторами, счетчика-делителя, запоминающего устройства команд и блока синхронизации. Даны три варианта выполнения блока синхронизации. 2 з.п.ф-лы, 9 ил.
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Труды ЦАГИ, М., вып.2227, 1984. | |||
