Изобретение относится к измерительной технике и может применяться для исследования напряженно-деформированного и теплового состояния различных конструкций, агрегатов и сооружений.
Известна тензометрическая система "Прочность-А" (см. А.И.Беклемищев, В.В.Шевчук, Ю.С.Ильин и др. Автономная передвижная тензометрическая система "Прочность-А". Приборы и системы управления, 1988, №2, с.19-20).
Система содержит выносные, располагаемые у объекта исследования коммутаторы датчиков (КД), выполненные в виде отдельных блоков на 64 датчика каждый. Все КД подсоединены к общей магистрали управления и сгруппированы в четыре группы по восемь КД в каждой. Адреса коммутаторов в каждой группе нумеруются с первого по восьмой. Каждая группа КД имеет свою измерительную магистраль. Сигналы управления КД формируются блоком управления (УК). Измерительные магистрали КД подключены к входам четырех нормализаторов тензометрической аппаратуры. Выходы нормализаторов соединены с входами коммутатора сигналов, выход которого соединен с аналого-цифровым преобразователем (АЦП), код которого через интерфейсный блок передается в ЭВМ. Управление работой системы осуществляется от ЭВМ.
Недостаток структуры известной системы заложен в наличии общей для всех групп коммутаторов магистрали управления при наличии различных нормализаторов сигналов, к входам которых подсоединены измерительные магистрали соответствующих групп коммутаторов. Такая структура не позволяет расширять систему по количеству коммутаторов датчиков сверх максимально возможного, которое определяется токами утечки закрытых ключей коммутаторов. При увеличении количества коммутаторов датчиков, подсоединяемых к общей магистрали управления, суммарные токи утечки будут больше и погрешность измерения превысит заданную величину.
Кроме того, наличие одной общей магистрали управления для всех групп коммутаторов, измерительные магистрали которых подсоединены к различным нормализаторам сигналов, не позволяет осуществлять одновременный опрос датчиков с разными адресами в каждой группе коммутаторов. Поэтому, если количество датчиков, установленных на исследуемой конструкции и подсоединенных кабелями датчиков к входам коммутаторов датчиков, будет различным для каждого нормализатора, то опрашивать надо будет все датчики с первого до последнего, имеющего наибольший из всех адрес. Это потребует избыточности в памяти ЭВМ, так как надо будет опрашивать и адреса тех каналов коммутаторов, к которым датчики не подключены, и увеличит время опроса всех датчиков.
Известна измерительная информационная система "Прочность-Л" (см. 1. Система измерительная "Прочность-Л". Техническое описание и инструкция по эксплуатации. 1380.000.00 ТО. ЦАГИ, 1989. 2. А.И.Беклемищев, Е.Г.Зубов, Ю.С.Ильин, В.М.Ордынцев, В.В.Шевчук. Опыт применения и перспективы развития сети измерительных информационных систем "Прочность". Труды ЦАГИ, 1997. Вып.2628, с.61-63, прототип).
Система содержит выносные коммутаторы датчиков (КД), выполненные на микросхемах по пирамидальной схеме. Коммутатор имеет 3 ступени коммутации: первая ступень - номер точки в разъеме, вторая ступень - номер разъема, третья ступень - номер коммутатора. Каждый коммутатор позволяет подсоединить до 64 датчиков. Коммутаторы подсоединяют к магистрали управления по схеме общей шины. К одной магистрали управления можно подсоединить до восьми КД. Измерительные выходы КД, подсоединенных к магистрали управления, запараллелены и образуют измерительную магистраль. Сигналы управления КД формируются блоками управления коммутаторами (УК), входы которых соединены с интерфейсом управления, соединенным через интерфейсную плату с ПЭВМ. Измерительная магистраль соединена с входом соответствующего нормализатора сигналов. В системе имеется четыре нормализатора сигналов, каждый из которых соответствует типу подсоединенных к нему датчиков. Выходы нормализаторов сигналов через коммутатор подсоединены к аналого-цифровому преобразователю (АЦП). Управление коммутатором нормализаторов осуществляется от интерфейса управления. Выход АЦП соединен с интерфейсом данных, выход которого соединен через интерфейсную плату с ПЭВМ. Управление блоками системы, синхронизацию их работы и формирование питания датчиков осуществляет устройство управления системой. ПЭВМ по заданной программе выдает коды управления, принимает результаты измерения и осуществляет обработку и представление информации в цифровом и графическом виде. Такая структура системы позволяет при расширении количества подключаемых коммутаторов устранить недостатки, присущие структуре системы с одной общей магистралью управления. По крайней мере по сравнению с системой "Прочность-А" можно увеличивать в каждой магистрали управления количество коммутаторов датчиков в четыре раза (с 8 КД до 32 КД).
Недостаток такой структуры системы состоит в том, что при увеличении количества подсоединяемых к магистрали управления коммутаторов датчиков увеличивается длина не только магистрали управления, но и измерительной магистрали. Увеличение длины магистрали управления существенно не влияет на форму сигнала управления, т.к. амплитуда сигнала равна нескольким вольтам. Увеличение длины измерительной магистрали приводит к искажению прямоугольной формы измеряемого милливольтового сигнала датчика из-за переходных процессов в длинной линии, обусловленных распределенными параметрами кабеля измерительной магистрали. Чтобы обеспечить при этом требуемую точность измерения сигнала датчика, необходимо уменьшать быстродействие системы. Кроме того, увеличение количества коммутаторов в системе потребует увеличения количества жил кабеля магистрали управления, т.к. потребуется увеличить количество логических адресов коммутаторов датчиков.
Задачей изобретения является увеличение не менее чем в два раза количества коммутаторов датчиков в измерительной системе без ухудшения заданной точности и быстродействия, а также без увеличения количества жил в кабелях магистралей управления.
Техническим результатом изобретения является увеличение количества датчиков, подсоединяемых к измерительному устройству системы, без ухудшения заданной точности и быстродействия системы.
Технический результат достигается тем, что измерительная система, содержащая m групп коммутаторов датчиков, каждая из которых содержит одну первую подгруппу из n коммутаторов, измерительные входы которых соединены кабелями с датчиками, соответствующие измерительные выходы коммутаторов в подгруппе соединены между собой и образуют измерительную магистраль, управляющие входы коммутаторов первой подгруппы в каждой из m магистралей управления соединены с выходом соответствующего устройства управления коммутаторами, вход которого соединен с информационным выходом интерфейса управления, вход которого соединен через интерфейсный блок с ПЭВМ, m нормализаторов сигналов, выходы которых через коммутатор нормализаторов соединены с измерительным входом аналого-цифрового преобразователя, информационный выход которого соединен с первым информационным входом интерфейса данных, выход которого через интерфейсный блок соединен с ПЭВМ, устройство управления системой, выход формирователя питания которого соединен с входами питания нормализаторов сигналов, информационный вход соединен с информационным выходом интерфейса управления, информационный выход соединен с информационным входом коммутатора нормализаторов и вторым информационным входом интерфейса данных, первый управляющий выход устройства управления системой соединен с первыми управляющими входами устройств управления коммутаторами, интерфейса управления и интерфейса данных, второй управляющий выход устройства управления системой соединен с управляющим входом аналого-цифрового преобразователя, управляющий выход которого соединен со вторым управляющим входом интерфейса данных, третий управляющий вход и управляющий выход которого соединены соответственно с первым управляющим выходом и первым управляющим входом интерфейсного блока, четвертый управляющий вход интерфейса данных соединен с первым управляющим выходом интерфейса управления, вторые управляющие выходы которого соединены с соответствующими вторыми управляющими входами устройств управления коммутаторами, третьи управляющие входы которых соединены со вторым управляющим входом интерфейса управления и вторым управляющим выходом интерфейсного блока, второй управляющий вход которого соединен с третьим управляющим выходом интерфейса управления, дополнена в каждой из m групп коммутаторов датчиков k-1 подгруппами из n коммутаторов каждая, m коммутаторами сигналов и блоком управления коммутаторами сигналов, логические адреса коммутаторов датчиков k-1 подгрупп идентичны логическим адресам коммутаторов датчиков первых подгрупп, управляющие входы коммутаторов k-1 подгрупп соединены с соответствующими магистралями управления первых подгрупп коммутаторов датчиков, измерительные магистрали каждой из k подгрупп коммутаторов датчиков в каждой из m групп коммутаторов датчиков соединены с информационными входами соответствующих коммутаторов сигналов, выходы которых соединены с измерительными входами соответствующих нормализаторов сигналов, управляющие входы каждого коммутатора сигналов соединены с выходами блока управления коммутаторами сигналов, информационный вход которого соединен с информационным выходом интерфейса управления, второй управляющий вход которого соединен с первым управляющим входом блока управления коммутаторами сигналов, второй управляющий вход которого соединен с первым управляющим выходом устройства управления системой.
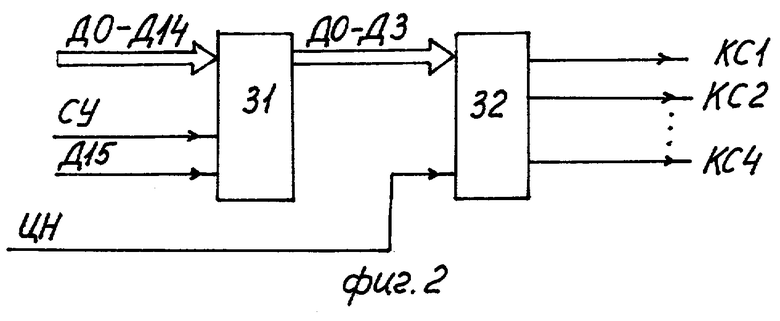
На фиг.1 представлена блок-схема измерительной системы.
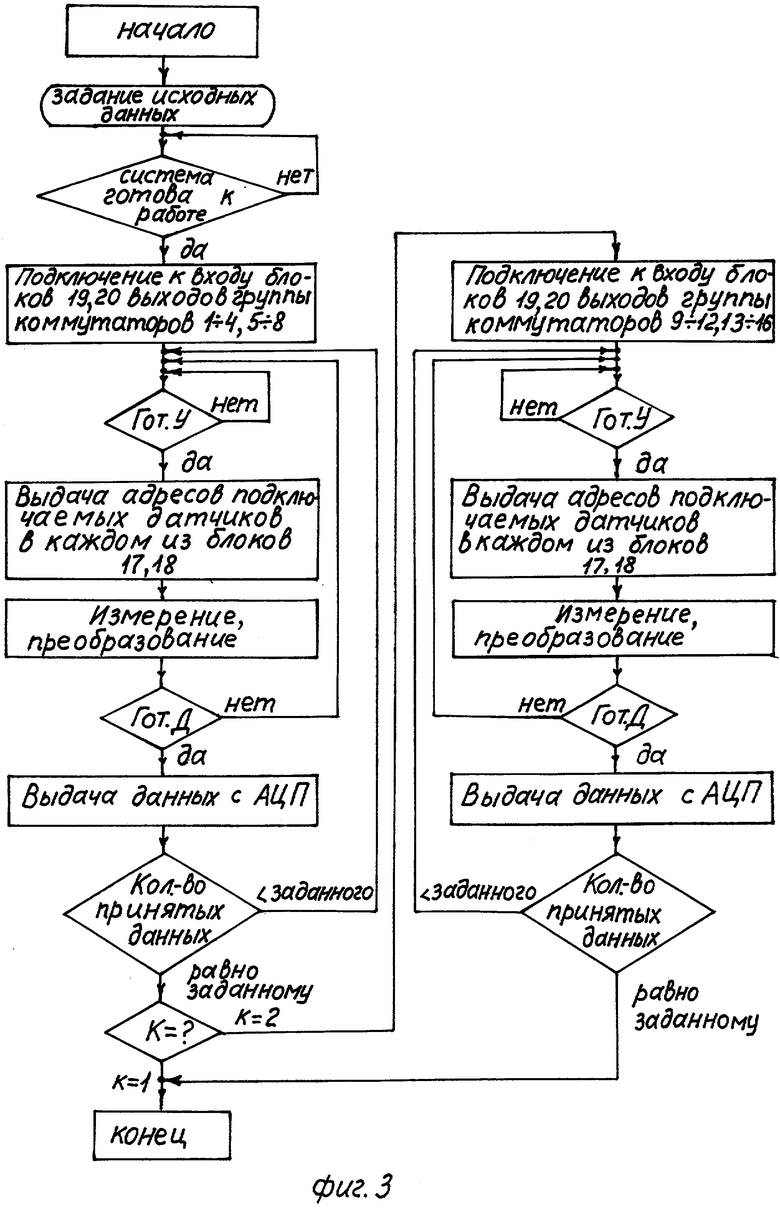
На фиг.2 представлена функциональная схема блока управления коммутаторами сигналов.
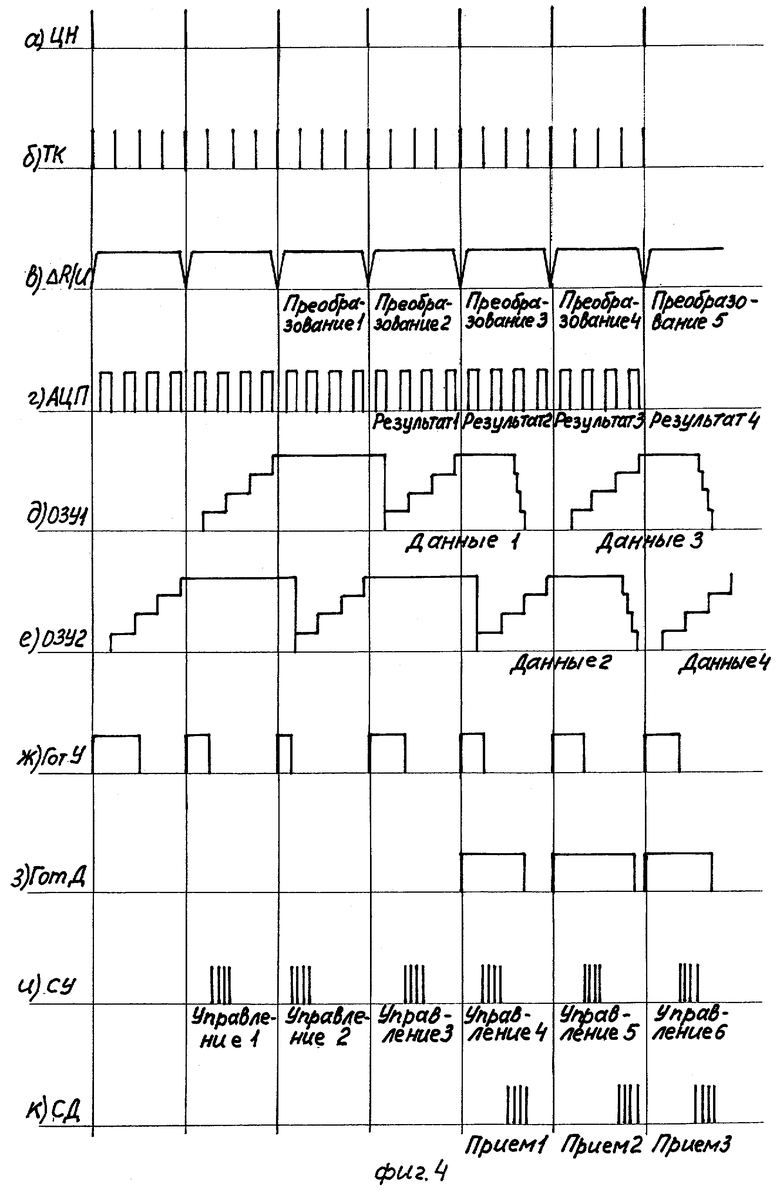
На фиг.3 представлен алгоритм работы измерительной системы.
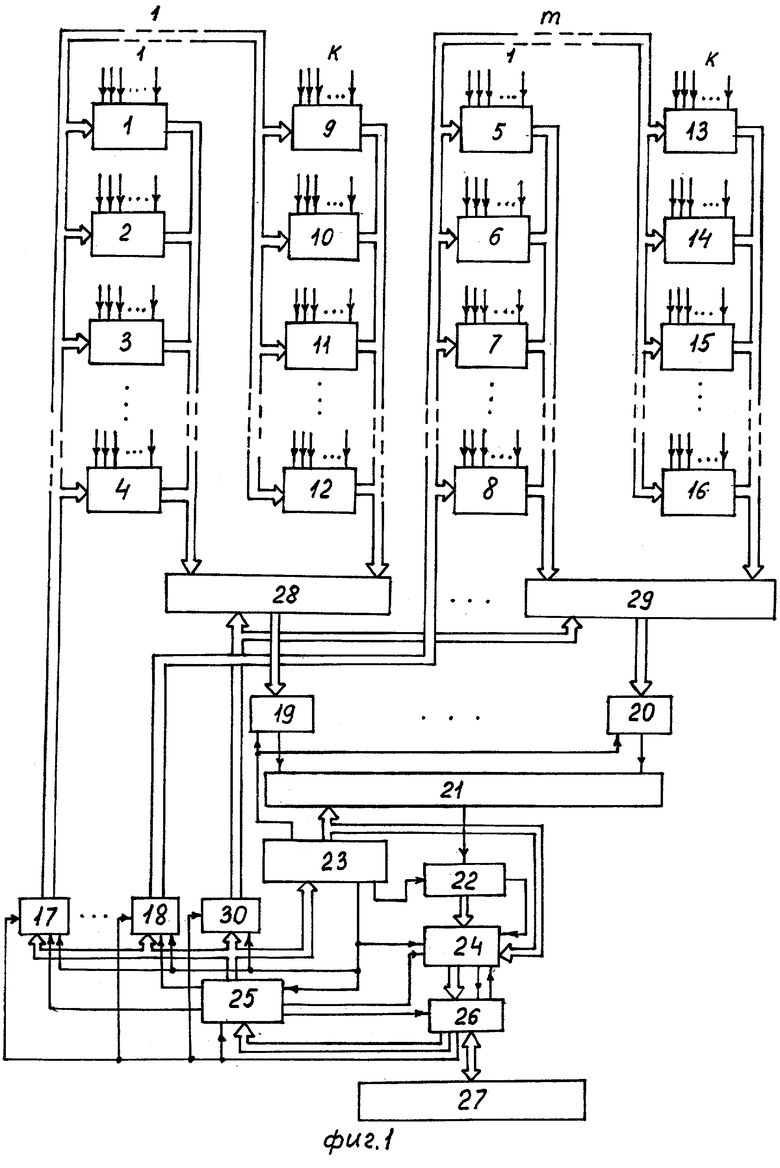
На фиг.4 представлены временные диаграммы работы системы.
Система содержит коммутаторы датчиков 1-16, устройства управления коммутаторами 17-18, нормализаторы сигналов 19-20, коммутатор нормализаторов 21, аналого-цифровой преобразователь 22, устройство управления системой 23, интерфейс данных 24, интерфейс управления 25, интерфейсный блок 26, ПЭВМ 27, коммутаторы сигналов 28-29, блок управления коммутаторами сигналов 30. Коммутаторы датчиков объединены в подгруппы. Коммутаторы 1-4 составляют первую подгруппу 1-ой группы, коммутаторы 9-12 составляют k-ю подгруппу 1-ой группы, коммутаторы 5-8 входят в первую подгруппу m-ой группы, а коммутаторы 13-16 входят в состав k-ой подгруппы m-ой группы. Стрелками показаны входы коммутаторов от датчиков. Коммутаторы датчиков такие же, как в системе "Прочность-Л" (см. Коммутатор КД 590. Техническое описание и инструкция по эксплуатации 1332.000.00 ТО. ЦАГИ, 1989).
Адреса коммутаторов в каждой подгруппе нумеруются с 1 по n-ый. Все k подгрупп коммутаторов датчиков в каждой из m групп коммутаторов датчиков соединены по входам со своей общей для них магистралью управления, которая соединена с выходом соответствующего устройства управления 17, 18. Количество жил кабеля магистрали управления соответствует количеству разрядов, необходимых для управления коммутаторами датчиков. Измерительные выходы коммутаторов 1-4, 9-12; 5-8, 13-16 соединены со своими измерительными магистралями. При этом измерительные магистрали первой группы соединены с информационными входами коммутатора сигналов 28, а измерительные магистрали m-ой группы - с информационными входами коммутатора сигналов 29. Выход коммутатора сигналов 28 соединен с измерительным входом нормализатора сигналов 19, а выход коммутатора сигналов 29 - с измерительным входом нормализатора сигналов 20. Выходы нормализаторов сигналов 19 и 20 соединены с входами коммутатора нормализаторов 21, выход которого соединен с измерительным входом АЦП 22. Информационный выход АЦП соединен с первым информационным входом интерфейса данных 24, информационный выход которого соединен с информационным входом интерфейсного блока 26. Информационный выход интерфейсного блока 26 соединен с информационным входом интерфейса управления 25. Интерфейсный блок 26 соединен с ПЭВМ (персональным компьютером) через внешний порт или непосредственно подсоединен к шине компьютера. Информационный выход интерфейса управления 25 соединен с информационными входами устройств управления коммутаторами 17 и 18, устройства управления системой 23 и блока управления коммутаторами сигналов 30.
Для обеспечения синхронизации и управления работой в системе блоки соединены между собой по управляющим входам и выходам. В устройстве управления системой 23 выход формирователя питания соединен с входами питания нормализаторов сигналов 19 и 20, информационный выход соединен с информационным входом коммутатора нормализаторов 21 и вторым информационным входом интерфейса данных 24. С информационного выхода блока 23 поступает код номера нормализатора, выход которого должен быть подключен по сигналу "ТК" (см. фиг.4) к входу коммутатора нормализаторов 21. Первый управляющий выход устройства 23 соединен с первыми управляющими входами устройств 17 и 18, интерфейса управления 25, интерфейса данных 24 и вторым управляющим входом блока управления коммутаторами сигналов 30. По этим цепям передается из устройства 23 сигнал "ЦП" (Цикл нормализации). Второй управляющий выход устройства 23 соединен с управляющим входом блока 22. С этого выхода передается сигнал "ТК" (Такт коммутации). Второй управляющий вход интерфейса данных 24 соединен с управляющим выходом АЦП 22, с которого передается сигнал "КП АЦП" (Конец цикла преобразования АЦП); третий управляющий вход блока 24 соединен с первым управляющим выходом интерфейсного блока 26, к нему от ПЭВМ 27 через блок 26 в блок 24 передаются стробы данных "СД". Четвертый управляющий вход блока 24 соединен с первым управляющим выходом блока 25, с которого передается сигнал "РГД" (Разрешение готовности данных). Управляющий выход блока 24 соединен с первым управляющим входом блока 26, через который в ПЭВМ 27 от блока 24 поступает сигнал "Гот Д" (Готовность данных). В интерфейсе управления 25 вторые управляющие выходы соединены со вторыми управляющими входами соответствующих устройств управления коммутаторами 17, 18, по этим цепям от блока 25 в блоки 17, 18 передаются сигналы номеров устройств "УK1", "УКm". Третий управляющий выход блока 25 соединен со вторым управляющим входом блока 26, через который в ПЭВМ 27 передается от блока 25 сигнал "Гот У" (Готовность управления). Третьи управляющие входы блоков 17, 18, первый управляющий вход блока 30 и второй управляющий вход блока 25 соединены со вторым управляющим выходом блока 26, через который от ПЭВМ 27 поступают стробы управления "СУ". Выход блока 30 соединен с управляющими входами коммутаторов сигналов 28 и 29.
Блок управления коммутаторами сигналов 30 (фиг.2) функционально состоит из двух регистров: входного регистра 31 и рабочего регистра 32. Информационным входом блока 30 является информационный вход регистра 31, состоящий из 16-ти двоичных разрядов. При этом разряды D0-D14 используются для записи в регистр 31, а разряд D15 служит для разрешения записи в регистр 31. Первым управляющим входом блока 30 является управляющий вход регистра 31, на который от блока 26 поступает строб управления "СУ", по которому информация разрядов D0-D14 записывается в регистр 31. Рабочий регистр 32 по информационному входу соединен с информационным выходом регистра 31, при этом число двоичных разрядов регистра 32 равно m. Например, при m=4, регистр 32 будет четырехразрядным (см. фиг.2). Информация в регистр 32 записывается по сигналу "ЦН", поступающему на второй управляющий вход блока 30 с блока 23. Выход блока 30 является выходом регистра 32 и состоит из m двоичных разрядов "KC1", "КСm", которые используются для управления коммутаторами сигналов 28-29. Каждый коммутатор сигналов состоит из ключей. Вход каждого ключа в коммутаторе соединен со своим проводом кабеля соответствующей измерительной магистрали. Количество проводов в измерительной магистрали определяется схемой подключения датчика ко входу нормализатора сигналов 19-20 (например, для подключения одиночных тензорезисторов требуется четыре провода). Управляющий сигнал с регистра 32 поступает одновременно на все ключи, коммутирующие датчик. Выходы соответствующих ключей коммутатора сигналов объединены и соединены с соответствующими входами нормализатора.
Остальные блоки системы такие же, как в системе "Прочность-Л", их техническое описание известно (см. Модуль измерительный системный МИС. Техническое описание и инструкция по эксплуатации 1347.000.00 ТО. ЦАГИ, 1989).
Измерительная система работает следующим образом.
Перед началом работы подсоединяют необходимые для исследования измеряемых процессов коммутаторы с подсоединенными к ним датчиками к управляющим и измерительным магистралям. Вводят в ПЭВМ исходные данные соответствия адресов датчиков на исследуемой конструкции адресам каналов коммутаторов датчиков, характеристики датчиков и материалов исследуемой конструкции, а также количество подгрупп коммутаторов k в группе и количество групп m. Рассмотрим работу системы, в которой m=4, k=2 (см. фиг.3). Если подключение блоков системы осуществлено правильно и нет отказов в блоках, система готова к работе. В противном случае выдается сигнал об отказе, требующий устранения неисправности. После выдачи сигнала готовности системы к работе по команде ПВЭМ на информационный вход регистра 31 в сопровождении строба управления подается 15-разрядный код, в котором во всех разрядах, кроме первого, нули. В первом разряде передается логическая единица. По 16-му разряду, который используется для разрешения записи в регистр 31, передается также единица. По сигналу "ЦП" код переписывается в регистр 32, где хранится до конца опроса всех датчиков, подсоединенных к первым подгруппам четырех групп. Код с единицей в младшем разряде поступает с выхода "KC1" регистра 32 на коммутаторы сигналов 28 - 29, которые подсоединят к измерительным входам нормализаторов сигналов 19-20 измерительные магистрали первых подгрупп коммутаторов датчиков 1-4, 5-8. После завершения цикла опроса, измерения и приема результатов измерения всех датчиков, подсоединенных к коммутаторам 1-4 и 5-8, ПЭВМ 27 выдаст в блок 30 через блоки 26 и 25 код с единицами во втором и шестнадцатом разрядах. Блок 30 выработает код с единицей во втором разряде, который с выхода "КС2" регистра 32 поступит на коммутаторы сигналов 28-29. Коммутаторы 28-29 отсоединят от входов нормализаторов 19-20 измерительные магистрали первых подгрупп коммутаторов датчиков 1-4, 5-8 и подсоединят к входам этих нормализаторов вторые подгруппы коммутаторов датчиков 9-12, 13-16.
В остальном система в каждом из циклов опроса, измерения и приема результатов измерений работает аналогично. На временной диаграмме работы системы эпюры "а"-"ж" (фиг.4) характеризуют работу системы в автономном режиме (без ПЭВМ), эпюры "з"-"к" поясняют динамику работы системы совместно с ПЭВМ. Длительность периода импульсов "ТК" равна 100 мкс, "ЦП" - 400 мкс. Эпюра "в" отражает циклы преобразования нормализаторов сигналов. Начало цикла - сигнал "ЦН", конец - следующий сигнал "ЦН". По циклу "ЦН" в нормализаторах сигналов результат преобразования записывается в оперативную аналоговую память, в которой он сохраняется весь последующий цикл. Для повышения быстродействия аналоговая память построена на двух параллельных каскадах. Пока один каскад формирует информацию, второй в течение цикла нормализации хранит результат предыдущего измерения. В следующий цикл преобразования функции каскадов меняются. Каскад, хранящий результат преобразования (например, приращения сопротивления тензорезистора в электрическое напряжение), подсоединяется к выходу нормализатора сигналов 19-20. Опрос выходов нормализаторов 19-20 производится коммутатором нормализаторов 21 кодами номера канала с частотой сигналов "ТК". Сигналы "ТК", задержанные на время переходных процессов в нормализаторах 19-20 при коммутации сигналов датчиков, используются для запуска АЦП 22 (эпюра "г"). Коды преобразования АЦП записываются в двухпортовую оперативную память ОЗУ 1 и ОЗУ 2 блока 24. Объем памяти каждого ОЗУ 16×4 бит позволяет записать в память четыре 16-разрядных результата измерения. Принцип работы двухпортовой оперативной памяти аналогичен работе аналоговой памяти: пока в одно ОЗУ производится запись результата измерения, во втором ОЗУ хранятся четыре результата предыдущего результата преобразования АЦП (эпюры "д", "е"). Запись информации в ОЗУ производится по сигналу "КП АЦП" при подаче на вход кода номера нормализатора, который подается одновременно на коммутатор нормализаторов 21. Этим достигается синхронность записи в ОЗУ результатов измерения с темпом переключения коммутатора 21. Выбор ОЗУ, в которое производится в данный цикл запись, осуществляется триггером, переключение которого осуществляется сигналом "ЦН".
В начале цикла преобразования блоком 25 формируется сигнал ″Гот У" (эпюра "ж"), который означает готовность блоков измерительного модуля к приему команд управления. Продолжительность сигнала - два такта сигнала "ТК". В случае отказа в устройствах управления коммутаторами или магистралях управления, сигнал "Гот У" блокируется. Отсутствие готовности является признаком отказа измерительного модуля для ПЭВМ.
Эпюры "з", "и", "к" поясняют динамику обмена блоков измерительного модуля с ПЭВМ. Начало обмена инициируется ПЭВМ посылкой по сигналу ″Гот У" команд управления. Признаком команды управления является логический нуль в 16-ом разряде. Посылка команды сопровождается сигналом "СУ" (эпюра "и"). Количество сигналов "СУ" равно четырем по количеству устройств управления коммутаторами. Первым же сигналом "СУ" производится сброс сигнала ″Гот У". Команды записываются во входные регистры соответственно адресам устройств 17-18 и по очередному сигналу "ЦН" переписываются в рабочие регистры. С этого момента начинается цикл преобразования нормализаторов сигналов, соответствующий поданной команде. Результат на выходе еще не готов, и ПЭВМ может подать по сигналу ″Гот У" вторую серию команд управления. В следующем цикле производится аналого-цифровое преобразование измеряемых сигналов первой серии команд и заполнение одного из портов оперативной памяти (ОЗУ). К началу следующего цикла результат готов, и для ПЭВМ блоком 24 выставляется сигнал ″Гот Д" (эпюра "з"). В этом цикле ПЭВМ выдает четвертую серию команд и производит прием результатов измерений по сигналам "СД" (эпюра "к"). Результат измерения каждого нормализатора сигналов в цикле сопровождается своим стробом данных "СД". Формирование сигнала "Гот Д" производится узлом формирования по сигналу "ЦП" в момент, когда после появления сигнала "РГД" пройдет два цикла работы измерительного модуля, так как с момента подачи команды и готовностью результатов измерения проходят циклы аналогового преобразования (эпюры "з", "и", "к"). Сигнал "РГД" предназначен для выработки сигнала, участвующего в формировании готовности данных для ПЭВМ. Формирование сигнала "РГД" начинается по заднему фронту сигнала "СУ", сброс "РГД" производится в конце каждого цикла сигналом "ЦН".
Как видно из временных диаграмм, между выдачей первой серии команд и первыми результатами измерений, принятыми ПЭВМ, проходит несколько циклов. Аналогичная ситуация и в конце: команды управления все исчерпаны, а результаты измерения еще несколько циклов передаются в ПЭВМ.
Применение изобретения позволит увеличить не менее чем в два раза количество опрашиваемых датчиков в измерительной системе с заданной погрешностью и быстродействием без увеличения количества жил в кабелях магистралей управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СОПРЯЖЕНИЕМ АБОНЕНТОВ | 1993 |
|
RU2037196C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОДГОТОВКОЙ РАКЕТ-НОСИТЕЛЕЙ | 2011 |
|
RU2450306C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
| МНОГОКАНАЛЬНЫЙ АДАПТЕР АНАЛОГОВОГО ВВОДА-ВЫВОДА | 2000 |
|
RU2183857C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА КОРАБЕЛЬНОГО КОМПЛЕКСА УПРАВЛЕНИЯ ОРУЖИЕМ | 2004 |
|
RU2273046C1 |
| УНИФИЦИРОВАННЫЙ ПУЛЬТОВОЙ ПРИБОР | 2004 |
|
RU2276401C2 |
| УСТРОЙСТВО ВВОДА-ВЫВОДА | 2002 |
|
RU2221267C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1996 |
|
RU2097703C1 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ВЫСОКОСКОРОСТНОГО ПОЕЗДА | 2003 |
|
RU2238208C1 |
Изобретение относится к измерительной технике и может применяться для исследования напряженно-деформированного и теплового состояния различных конструкций, агрегатов и сооружений. Система содержит m групп коммутаторов датчиков, каждая из которых содержит k подгрупп из n коммутаторов. Коммутаторы подсоединены к магистрали управления. Измерительные выходы коммутаторов датчиков образуют измерительные магистрали. Сигналы управления коммутаторами формируются блоками управления коммутаторами, выходы которых соединены с ПЭВМ через интерфейс управления. Измерительные магистрали соединены с нормализаторами сигналов. Выходы нормализаторов через коммутатор подсоединены к аналого-цифровому преобразователю, выход которого соединен через интерфейс данных с ПЭВМ. Изобретение позволяет увеличить не менее чем в два раза количество опрашиваемых датчиков с заданной погрешностью и быстродействием без увеличения количества жил в кабелях магистралей управления. 4 ил.
Измерительная система, содержащая m групп коммутаторов датчиков, каждая из которых содержит одну первую подгруппу из n коммутаторов, измерительные входы которых соединены кабелями с датчиками, соответствующие измерительные выходы коммутаторов в подгруппе соединены между собой и образуют измерительную магистраль, управляющие входы коммутаторов первой подгруппы в каждой из m магистралей управления соединены с выходом соответствующего устройства управления коммутаторами, вход которого соединен с информационным выходом интерфейса управления, вход которого соединен через интерфейсный блок с ПЭВМ, m нормализаторов сигналов, выходы которых через коммутатор нормализаторов соединены с измерительным входом аналого-цифрового преобразователя, информационный выход которого соединен с первым информационным входом интерфейса данных, выход которого через интерфейсный блок соединен с ПЭВМ, устройство управления системой, выход формирователя питания которого соединен с входами питания нормализаторов сигналов, а информационный вход соединен с информационным выходом интерфейса управления, информационный выход соединен с информационным входом коммутатора нормализаторов и вторым информационным входом интерфейса данных, первый управляющий выход устройства управления системой соединен с первыми управляющими входами устройств управления коммутаторами, интерфейса управления и интерфейса данных, второй управляющий выход устройства управления системой соединен с управляющим входом аналого-цифрового преобразователя, управляющий выход которого соединен со вторым управляющим входом интерфейса данных, третий управляющий вход и управляющий выход которого соединены соответственно с первым управляющим выходом и первым управляющим входом интерфейсного блока, четвертый управляющий вход интерфейса данных соединен с первым управляющим выходом интерфейса управления, вторые управляющие выходы которого соединены с соответствующими вторыми управляющими входами устройств управления коммутаторами, третьи управляющие входы которых соединены со вторым управляющим входом интерфейса управления и вторым управляющим выходом интерфейсного блока, второй управляющий вход которого соединен с третьим управляющим выходом интерфейса управления, отличающаяся тем, что в ней в каждой из m групп коммутаторов датчиков введены k-1 подгрупп из n коммутаторов датчиков каждая, m коммутаторов сигналов и блок управления коммутаторами сигналов, логические адреса коммутаторов датчиков k-1 подгрупп идентичны логическим адресам коммутаторов датчиков первых подгрупп, управляющие входы коммутаторов k-1 подгрупп соединены с соответствующими магистралями управления первых подгрупп коммутаторов датчиков, измерительные магистрали каждой из k подгрупп коммутаторов датчиков в каждой из m групп коммутаторов датчиков соединены с информационными входами соответствующих коммутаторов сигналов, выходы которых соединены с измерительными входами соответствующих нормализаторов сигналов, управляющие входы каждого коммутатора сигналов соединены с выходами блока управления коммутаторами сигналов, информационный вход которого соединен с информационным выходом интерфейса управления, второй управляющий вход которого соединен с первым управляющим входом блока управления коммутаторами сигналов, второй управляющий вход которого соединен с первым управляющим выходом устройства управления системой.
| МНОГОКАНАЛЬНЫЙ РЕГИСТРАТОР | 1990 |
|
RU2020424C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНЫХ ДЕФОРМАЦИЙ КОНСТРУКЦИЙ ПРИ ПОДКЛЮЧЕНИИ ТЕНЗОРЕЗИСТОРОВ К ТЕНЗОМЕТРИЧЕСКОЙ СИСТЕМЕ | 2000 |
|
RU2196296C2 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЦЕПЕЙ СБОРА ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 1994 |
|
RU2077063C1 |
| Многоканальная резервированная измерительная система | 1982 |
|
SU1102067A1 |
| Многоканальная измерительная система с резервированием | 1972 |
|
SU439814A1 |

