Изобретение относится к гидроакустике, а именно к гидроакустическим навигационным приборам.
Известно техническое решение корреляционного определения глубины под килем судна [1]
Это техническое решение характеризуется недостаточной точностью измерения глубины.
Наиболее близким техническим решением является способ и устройство [2] с регулируемой временной задержкой.
Недостатком данного технического решения является также недостаточная точность.
Целью изобретения является повышение точности измерения расстояния до дна.
Поставленная цель достигается заменой операции поиска значения регулируемой временной задержки по максимуму коэффициента взаимно-корреляционной функции (ВКФ) отраженного и задержанного сигналов на операцию поиска данной задержки по минимуму отношения произведения коэффициентов ВКФ и ее преобразования Гильберта от отраженного и задержанного излученного сигналов к разности квадратов данных коэффициентов.
Известно, что крутизна ВКФ в районе максимума недостаточно велика, чтобы обеспечить высокую точность определения регулируемой временной задержки, а значит и точность определения расстояния до дна. Для оценки повышения точности в описываемом техническом решении рассмотрим типичную для прототипа форму коэффициента ВКФ отраженного и задержанного излученного сигналов вида
ρxy(τ)=e-b(τ)cos2πfoτ= e-b(τ)cos ϕ, (1) где fo частота сигнала;
b коэффициент, определяемый характеристиками гидроакустического канала до дна и обратно.
Вычислим преобразование Гильберта (1), получим (τ)=e-b(τ)sin2πfoτ
(τ)=e-b(τ)sin2πfoτ
(2) разность квадратов
ρ
(3) произведение
ρxy(τ) (τ)
(τ)  e-b(τ)sin4πfoτ (4) и отношение
e-b(τ)sin4πfoτ (4) и отношение
B(τ)=ρxy(τ) (τ)/
(τ)/ (τ)-
(τ)- (τ)
(τ)
 tg4πfo(τ)
tg4πfo(τ)
(5)
Сравнительный анализ (5) и (1) показывает, что крутизна tg2 ϕ значительно больше крутизны cos ϕ и sin ϕ, кроме того, по сравнению с прототипом функция (5) нечетная, что облегчает поиск аргумента ее минимума. Кроме того, функция (5) удвоенного аргумента по сравнению с (1).
Эти свойства позволяют сделать вывод о соответствии критериям "новизна" и "существенные отличия".
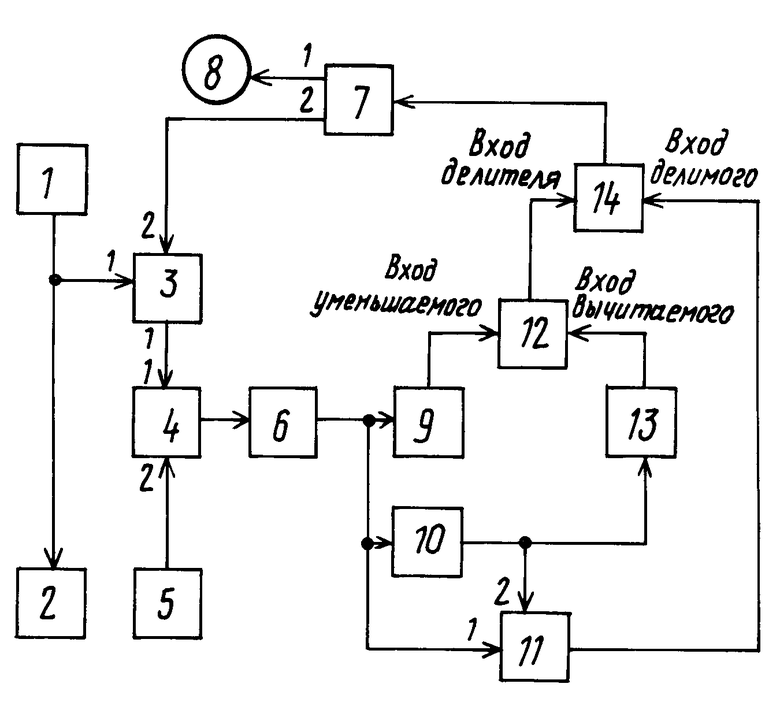
На чертеже изображено устройство для реализации способа.
Устройство, реализующее способ, состоит из генератора 1, соединенного с излучателем 2 и первым входом блока 3 регулируемой временной задержки, выход которого соединен с первым входом первого 4 умножителя, второй вход которого соединен с приемником 5, а выход с интегратором 6, при этом второй вход блока 3 регулируемой временной задержки соединен с вторым выходом экстремального регулятора 7, первый выход последнего подключен к индикатору 8, кроме того, выход интегратора 6 соединен одновременно с дополнительно внесенным первым 9 квадратором, с дополнительно внесенным блоком 10 преобразования Гильберта, а также с дополнительно внесенным вторым 11 умножителем, при этом выход первого 9 квадратора соединен с входом уменьшаемого дополнительно внесенного блока 12 разности, вход вычитаемого данного блока разности соединен через дополнительно внесенный второй 13 квадратор одновременно с выходом дополнительно внесенного блока 10 преобразования Гильберта и вторым входом дополнительно внесенного второго 11 умножителя, выход последнего подключен к входу делимого дополнительно внесенного блока 14 деления, при этом вход делителя данного 14 блока соединен с выходом дополнительно внесенного блока 12 разности, кроме того, выход дополнительно внесенного блока 14 деления соединен с входом экстремального 7 регулятора.
Работает устройство следующим образом.
Генератор 1 передает сигнал излучателю 2 и через первый вход блока 3 регулируемой временной задержки на первый вход первого 4 умножителя, на второй вход которого поступает сигнал, отраженный от дна и принятый приемником 5. На выходе интегратора 6 формируется коэффициента ВКФ вида (1), который поступает через первый 9 квадратор на вход уменьшаемого дополнительно внесенного блока 12 разности, на вход вычитаемого данного блока 12 поступает квадрат сигнала от дополнительно внесенного блока 10 преобразования Гильберта. На выходе дополнительно внесенного блока 12 разности формируется процесс вида (3). В это время на выходе дополнительно внесенного второго 11 умножителя формируется процесс вида (4). В результате на выходе дополнительно внесенного блока 14 деления получим процесс, описываемый выражением (5), который и поступает в экстремальный 7 регулятор. Последний обеспечивает непрерывное удержание минимального напряжения на выходе дополнительно внесенного блока 14 деления путем управления блоком 3 регулируемой τ временной задержки. На шкале индикатора 9 величина введенной задержки отражается в виде расстояния до дна по формуле Д  .
.
Использование: в гидроакустических навигационных приборах. Сущность изобретения: в корреляционном способе регулируемую задержку излученного сигнала находят по минимуму отношения результата произведения коэффициентов взаимно-корреляционной функции и ее преобразования Гильберта к результату разности квадратов данных коэффициентов. 2 с.п. ф-лы, 1 ил.
| Простаков А.Л | |||
| Электронный ключ к Океану | |||
| Л.: Судостроение, 1986, с.16. |
