Изобретение относится к морской навигационной технике и может быть использовано для измерения расстояния от судна до дна.
В морской навигационной технике известен способ корреляционного определения (измерения) глубины под килем судна. Недостатком данного способа является ограничение измеряемого расстояния величиной интервала коррекции сигнала.
Наиболее близким техническим решением является способ корреляционного определения расстояния до дна, основанный на вертикальном излучении звукового сигнала на дно, взаимно-корреляционной обработке огибающих отраженного и излученного сигналов, нахождении максимума коэффициента взаимной корреляции в зависимости от регулируемой временной задержки излученного сигнала и определении расстояния до дна путем умножения половины скорости звука в воде на значение регулируемой временной задержки.
Недостатками известного способа являются сложность и недостаточная точность операции поиска величины корреляционной временной задержки (регулируемой временной задержки излученного сигнала, равной транспортному запаздыванию), соответствующей максимуму коэффициента взаимной корреляции. Это объясняется слабо выраженным максимумом взаимно-корреляционной функции (ВКФ), что ограничивает: точность определения расстояния, устойчивость работы способа и диапазона измеряемых расстояний до дна.
Целью изобретения является повышение точности.
Цель достигается тем, что в известном способе определения расстояния до дна, основанном на излучении сигнала на дно, взаимно-корреляционной обработке отраженного и излученного сигналов, определении расстояния до дна путем умножения половины скорости звука в воде на корреляционную временную задержку, последняя определяется по максимуму функции разности квадратов: коэффициента взаимной корреляции и его Гильбертовского преобразования (преобразования Гильберта). Максимум наступает при равенстве введенной регулируемой задержки излученного сигнала транспортному запаздыванию отраженного сигнала. Сопоставительный анализ с прототипом показывает, что заявляемый способ отличается от известного тем, что корреляционная временная задержка определяется по максимуму функции разности квадратов: коэффициента ВКФ и его преобразования Гильберта.
Отличие заявляемого способа заключается в дополнении прототипа операциями: вычисления преобразования Гильберта от ВКФ; вычисления квадратов: ВКФ и преобразования Гильберта от ВКФ; вычисления разности квадратов: ВКФ и его преобразования Гильберта.
Поиск корреляционной временной задержки осуществляется по функции разности квадрата ВКФ и квадрата преобразования Гильберта от ВКФ.
Эта совокупность признаков в сочетании с признаками прототипа позволяет повысить точность определения корреляционной временной задержки, а также повысить надежность (устойчивость) для расширения класса корреляционных функций.
Новая (неизвестная) совокупность признаков, состоящая из двух операций: возведение в квадрат и преобразование Гильберта, дополнена операцией вычитания, что обеспечило новое (неизвестное) свойство, превосходящее свойства отдельных операций ρxy(τ),ρxy2(τ),ρи(τ), т.е. дало сверхсуммарное свойство - устойчивую точность в расширенном классе корреляционных функций (подстилающих поверхностей при работе эхолота в различных районах океана). Это позволяет сделать вывод о соответствии критериям "Новизна" и "Существенные отличия". Кроме того, достигнут результат, удовлетворяющий потребности эффективного корреляционного способа измерения дистанции.
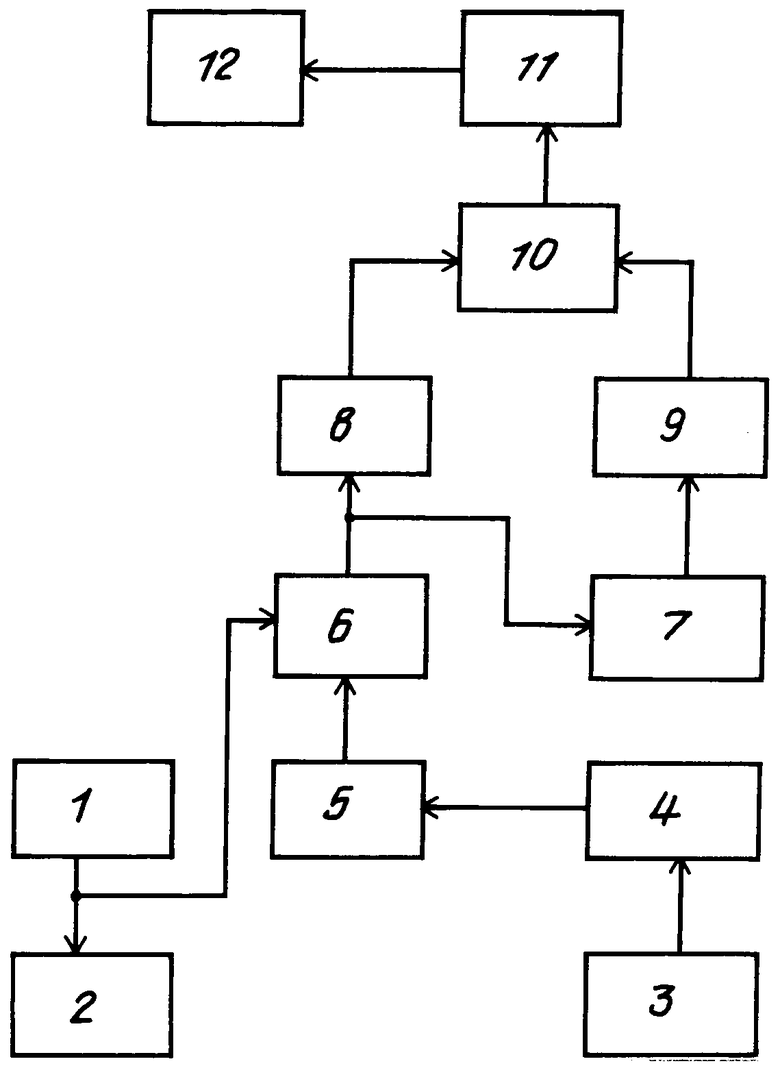
На чертеже изображено устройство для осуществления предлагаемого способа.
Способ определения расстояния до дна состоит в следующем.
Электрический сигнал с генератора 1 гармонического сигнала поступает на излучатель 2, где он преобразуется в акустический сигнал, который излучается вертикально вниз и отражается от дна. Отраженный сигнал (эхосигнал) принимается приемником 3, усиливается блоком 4, детектируется блоком 5 и поступает на первый коррелятор 6, на второй вход которого подается сигнал с генератора 1 гармонического сигнала. Первый коррелятор 6 вычисляет ВКФ: ρxy(τ), которая передается одновременно на квадратор 8 и блок 7 вычисления преобразования Гильберта, с выхода которого функция  (τ) поступает через квадратор 9 на вход вычитаемого блока 10 разности, на вход уменьшаемого данного блока 10 поступает функция ρxy2(τ) с квадратора 8. Функция разности B(τ)= ρxy2(τ)-
(τ) поступает через квадратор 9 на вход вычитаемого блока 10 разности, на вход уменьшаемого данного блока 10 поступает функция ρxy2(τ) с квадратора 8. Функция разности B(τ)= ρxy2(τ)-
 )поступает на блок 11 второго коррелятора определения корреляционной временной задержки по максимуму функции В( τ). С выхода блока 11 значение τ ,соответствующее максимуму функции В(τ) поступает на вход делимого блока 12 вычисления расстояния по формуле Н = Сτ/2, на вход делителя которого подается сигнал, пропорциональный значению 2/C, где С - среднее значение скорости звука в воде. Расстояние в блоке 12 вычисляется по формуле Н = Сτ/2. Способ может быть реализован на базе известной конструкции корреляционного эхолота. Блоки (11, 6), а также 1, 2, 3, 4, 5, 12 аналогичны однотипным блокам прототипа. Добавлены блоки 8, 9 - квадраторы, вычисляющие квадрат функции, и блок 10 - блок разности. Способ может быть реализован на базе ЭВМ или микроконтроллера на БИС К 145 ИК 1807 с добавлением в алгоритм операций: вычисление квадрата, вычисление разности, а также вычисление преобразования Гильберта.
)поступает на блок 11 второго коррелятора определения корреляционной временной задержки по максимуму функции В( τ). С выхода блока 11 значение τ ,соответствующее максимуму функции В(τ) поступает на вход делимого блока 12 вычисления расстояния по формуле Н = Сτ/2, на вход делителя которого подается сигнал, пропорциональный значению 2/C, где С - среднее значение скорости звука в воде. Расстояние в блоке 12 вычисляется по формуле Н = Сτ/2. Способ может быть реализован на базе известной конструкции корреляционного эхолота. Блоки (11, 6), а также 1, 2, 3, 4, 5, 12 аналогичны однотипным блокам прототипа. Добавлены блоки 8, 9 - квадраторы, вычисляющие квадрат функции, и блок 10 - блок разности. Способ может быть реализован на базе ЭВМ или микроконтроллера на БИС К 145 ИК 1807 с добавлением в алгоритм операций: вычисление квадрата, вычисление разности, а также вычисление преобразования Гильберта.
Использование предлагаемого способа обеспечивает повышение точности определения расстояния за счет увеличения точности определения корреляционной временной задержки путем увеличения крутизны функции в районе максимума; повышение устойчивости работы способа, обеспечивающего надежность повышения точности в различных районах океана, характеризующихся различными корреляционными функциями сигналов, отраженных от дна.
Изобретение относится к морской навигационной технике и может быть использовано для измерения расстояния от судна до дна. Цель - повышение точности. Сущность изобретения: в дополнение к известному способу измерения расстояния до дна (например, у эхолота) поиск корреляционной временной задержки проводится путем определения квадрата коэффициента взаимно-корреляционной функции, определения квадрата преобразования Гильберта от коэффициента взаимно-корреляционной функции отраженного и зондирующего сигналов и их сравнения. 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА, основанный на излучении звукового сигнала на дно, взаимно корреляционной обработки отраженного и зондирующего сигналов и определении расстояния путем умножения половины скорости звука в воде на корреляционную временную задержку, отличающийся тем, что определяют квадрат коэффициента взаимно корреляционной функции отраженного и зондирующего сигналов, определяют квадрат преобразования Гильберта от коэффициента взаимно корреляционной функции отраженного и зондирующего сигналов, сравнивают их и по результатам сравнения находят корреляционную временную задержку.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Хребтов А.А | |||
| и др | |||
| Судовые измерители скорости | |||
| Л.: Судостроение, 1978, с.286. | |||
