Изобретение относится к гидроакустике.
Известен способ определения скорости движения судна, основанный на измерении акустического сигнала, приеме отраженных сигналов на ряд приемников, ориентированных определенным образом относительно излучателя, и определении скорости судна с использованием информации о фазе, амплитуде или доплеровской частоте принятого сигнала.
Данное техническое решение требует высокой точности определения параметров сигнала, налагает высокие требования к ориентации приемников и в то же время не удовлетворяет требованиям точности в условиях качки.
Наиболее близким техническим решением является способ определения скорости движения судна относительно дна, основанный на вертикальном излучении гармонических звуковых сигналов на дно, взаимно корреляционной обработке огибающих отраженных сигналов, принятых двумя разнесенными по горизонтали приемниками, определении корреляционной задержки по аргументу коэффициента взаимной корреляции огибающей сигнала с двух приемников и определении скорости судна путем деления половины расстояния между приемниками на корреляционную временную задержку.
Для этого способа характерны ошибки в определении скорости, вызванные погрешностями в определении корреляционной временной задержки.
Целью изобретения является повышение точности.
Это достигается тем, что при способе определения скорости движения судна относительно дна, заключающемся в вертикальном излучении гармонических звуковых сигналов на дно, определении коэффициента взаимной корреляции огибающих отраженных сигналов, принятых первым и вторым приемниками, разнесенными по горизонтали вдоль судна, и определении скорости судна путем деления половины расстояния между приемниками на корреляционную временную задержку, которая определяется по коэффициенту автокорреляции огибающей сигнала с второго приемника при равенстве значения коэффициента автокорреляции значению коэффициента взаимной корреляции, введены операция задержки на регулируемую величину огибающей сигнала от первого приемника, а также суммирование значения этой задержки со значением корреляционной временной задержки, только после этого производится определение скорости судна путем деления половины расстояния между приемниками на сумму величин введенной регулируемой задержки и корреляционной временной задержки, кроме того, введена операция выбора значения коэффициента взаимной корреляции в диапазоне 0,3-0,7 от максимума.
Предложенный способ отличается от известного тем, что он дополнен операцией задержки на регулируемую величину огибающей сигнала от первого приемника, а также дополнен операцией суммирования величин регулируемой задержки и рассчитанной корреляционной временной задержки. Кроме того, изменена операция расчета значения скорости движения судна, по которой искомое значение определяется путем деления половины расстояния между приемниками на сумму величин введенной регулируемой задержки и корреляционной временной задержки. Кроме того, введена операция адаптации, согласно которой значение дополнительной вносимой регулируемой временной задержки выбирается таким, чтобы величина коэффициента взаимной корреляции находилась в пределах 0,3-0,7 от максимума.
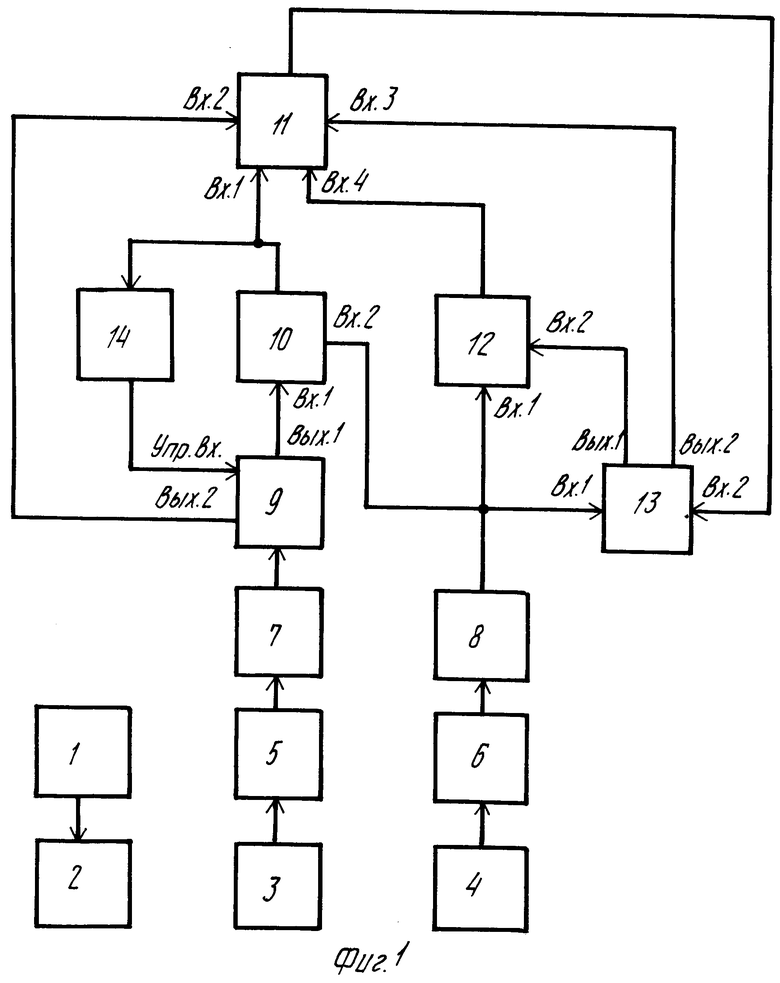
На фиг.1 представлена функциональная схема устройства для осуществления предлагаемого способа; на фиг.2 приведены характерные разновидности функций коэффициентов корреляции: 1 АКФ; 2 ВКФ; на фиг.3 графики напряжений для пояснения работы предложенного технического решения, где обозначено:
а) период излучения сигналов;
б) огибающая сигнала первого приемника, запаздывающая от момента излучения на величину τ31;
в) огибающая сигнала второго приемника, запаздывающая от момента излучения на величину τ32;
г) функция коэффициента ВКФ, пик функции приходится на τвкф τ32 τ31 причем при τвкф= 0 значение коэффициента ВКФ мало;
д) огибающая сигнала первого приемника, задержанная блоком регулируемой временной 9 задержки на величину τ1;
е) функция коэффициента ВКФ при задержке огибающей сигнала первого приемника на τ1, причем пик ВКФ будет находиться на τвкф* τ32 (τ31 + τ1), а при τвкф*= 0 значение коэффициента ВКФ стало значительно больше, чем ранее (см. рисунок г);
ж) пунктиром показан процесс определения корреляционной временной задержки при выполнении условия равенства коэффициентов АКФ и ВКФ.
Предлагаемый способ состоит в следующем.
Электрический гармонический сигнал с генератора 1 подается на излучатель 2, где он преобразуется в акустический сигнал, который излучается вертикально вниз и отражается от дна. Отраженный сигнал принимается двумя приемниками 3 и 4, разнесенными по горизонтам вдоль судна на расстояние d. Акустические сигналы преобразуются в электрические, усиливаются полосовыми усилителями 5 и 6 и детектируются детекторами 7 и 8. Выделенная огибающая с выхода детектора 7 задерживается на величину τ1 блоком регулируемой временной 9 задержки, с первого выхода которого поступает на первый вход низкочастотного корреляционного 10 блока, на второй вход которого подается огибающая сигнала с выхода детектора 8, низкочастотный корреляционный блок 10 рассчитывает коэффициент ВКФ и выдает его значение на первый вход вычислительного блока 11, а также на вход блока 14 адаптации, в котором измеренное значение коэффициента ВКФ сравнивается с границами диапазона 0,3-0,7 и вырабатывает управляющий сигнал в блок 9 регулируемой временно задержки на его изменение с целью получения на выходе низкочастотного корреляционного блока 10 значения коэффициента ВКФ в пределах 0,3-0,7.
Одновременно с выбором значения τ, обеспечивающего получение коэффициента ВКФ в пределах 0,3-0,7, полученное значение задержки τ1 с второго выхода блока регулируемой временной задержки поступает на второй вход вычислительного блока 11. Кроме того, с выхода блока 8 огибающая сигнала второго приемника 4 поступает на первый вход низкочастотного корреляционного блока 12 и через первый вход первый выход блока 13 регулируемой временной задержки на второй вход низкочастотного корреляционного блока 12. Причем с второго выхода блока 13 регулируемой временной задержки значение корреляционной временной задержки поступает на третий вход вычислительного блока 12. Вычисленное значение коэффициента АКФ (при данном значении корреляционной временной задержки, определяемом блоком 13 регулируемой временно задержки) с выхода низкочастотного корреляционного блока 12 поступает на четвертый вход вычислительного блока 11. Вычислительный блок 11 сравнивает значения коэффициентов АКФ и ВКФ и, управляя блоком 13 регулируемой временной задержки по цепи вых. 1 блока 11 вх.2 блока 13, выбирает такое значение корреляционной временной задержки τ2, при котором коэффициенты АКФ и ВКФ станут по величине равны. Вычислительный блок, зафиксировав равенство коэффициентов АКФ и ВКФ, вычисляет скорость судна путем деления половины расстояния между приемниками на сумму величин: регулируемой временной задержки τ1 и (авто)корреляционной временной задержки τ2 по формуле
V 
Блоки 1-8, 10, 12 и 13 аналогичны соответствующим блокам прототипа. Блок 9 аналогичен блоку 13. Вычислительный блок аналогичен вычислительному блоку прототипа с изменением алгоритма: вместо Vd/2τ2 расчет ведется по формуле V d/2(τ1+τ2), расширенными функциональными связями и может быть реализован на базе программируемого микроконтроллера. Блок и цепи синхронизации на фиг.1 не приведены. Блок 14 также может быть реализован на базе (того же) программируемого микроконтроллера.
Предложенный способ отличается операцией выбора участка рабочей характеpистики корреляционных функций, характеризуемых значениями коэффициентов корреляции в диапазоне 0,3-0,7 от максимума. Это достигается введением регулируемой временной задержки огибающей сигнала первого приемника и последующего учета этого значения задержки при расчете скорости движения судна. Выбор диапазона коэффициентов корреляции 0,3-0,7 объясняется тем, что на этом участке крутизна рабочих характеристик наибольшая. Кроме того, для известных типов корреляционных функций, встречающихся на практике в различных районах океана (см. фиг.2), этот рабочий участок отличается устойчивым характером наибольшей крутизны. Таким образом, предлагаемый способ по сравнению с жестким режимом прототипа отличается большей функциональной устойчивостью.
Применение предлагаемого способа определения скорости движения судна относительно дна обеспечивает по сравнению с прототипом, повышение точности. Кроме того, достигается дополнительный положительный эффект повышение функциональной устойчивости работы способа. Это стало возможным за счет повышения точности измерения корреляционной временной задержки путем смещения расчетов в область с большей крутизной и большим значением коэффициентов корреляции, что достигается введением операции адаптивного выбора регулируемой временно задержки, операции суммирования корреляционной временной задержки и значения регулируемой временной задержки и расчетом скорости движения судна по указанной формуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКИХ СРЕДАХ | 1992 |
|
RU2020429C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2042152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА | 1992 |
|
RU2020518C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА | 1993 |
|
RU2042153C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2020507C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2042959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2065176C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2041478C1 |
| Корреляционный гидроакустический лаг | 2018 |
|
RU2680727C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1993 |
|
RU2072526C1 |


Использование: для определения скорости движения судна относительно дна. Сущность изобретения: более точное измерение корреляционной временной задержки, величина которой равняется сумме, первое слагаемое равно регулируемой временной задержке, определяемой при равенстве коэффициента взаимной корреляции коэффициента взаимной корреляции коэффициенту автокорреляции, измеренной при нулевой задержке, а второе дополнительной задержке, значение которой выбирается таким, чтобы величина коэффициента взаимной корреляции находилась в пределах 0,3 0,7 от максимума. 3 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА, заключающийся в вертикальном излучении гармонических звуковых сигналов в сторону дна, взаимнокорреляционной обработке огибающих отраженных сигналов, принятых двумя разнесенными по горизонтали приемниками, и определении скорости судна путем деления половины расстояния между приемниками на величину корреляционной временной задержки, отличающийся тем, что, с целью повышения точности определения скорости судна, корреляционную временную задержку определяют как сумму, первое слагаемое которой равно задержке автокорреляционной функции, зафиксированной при равенстве коэффициента автокорреляции коэффициенту взаимной корреляции, измеренной при нулевой задержке, а второе слагаемое равно значению дополнительной вносимой регулируемой задержки для огибающей сигнала первого приемника, причем значение дополнительной вносимой регулируемой задержки выбирается таким, чтобы величина коэффициента взаимной корреляции находилась в пределах 0,3 0,7 от максимума.
| Способ определения скорости движения судна относительно дна | 1974 |
|
SU537315A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
