Изобретение относится к гидроакустике, а точнее к навигационным устройствам, конкретно к лагам, и может быть использована для повышения точности измерения скорости движения надводных кораблей, подводных лодок и других судов водного транспорта на малых и больших глубинах.
С начала 70-х годов в области производства морской навигационной техники развитых стран мира (США, Швеции, Японии) отмечается повышенный интерес к корреляционным гидроакустическим лагам (КГАЛ). Повышенный интерес к КГАЛ вызван его преимуществами по сравнению с традиционными доплеровскими гидроакустическими лагами (ДГАЛ), такими как, высокая точность измерения скорости корабля, независимость работы КГАЛ от измерения скорости звука в воде, меньшее влияние качки корабля из-за лучшего акустического контакта с грунтом, за счет большей ширины антенны, а также не требуется температурная стабилизация задающих генераторов тракта излучения, меньше волновой размер антенны, сравнительно малая мертвая зона позволяет расширять диапазон рабочих глубин под килем, меньшее энергопотребление и излучаемая мощность. Дополнительным преимуществом является возможность одновременного измерения скорости корабля и глубины под килем без формирования антенной дополнительного (вертикального) луча.
Многообразие реализаций существующих корреляционных гидроакустических лагов требует их классификации и систематизации, введение единых определений с целью облегчения оценки перспективности их использования на кораблях и судах ВМФ.
Корреляционные гидроакустические лаги характеризуются:
1. По виду и объему исходной информации относятся к корреляционным системам (КЭНС-1) (первого класса «без памяти»), в которых информация о навигационном поле снимается в одной текущей «точке», т.е. выходной сигнал датчика поля представляет собой скалярную величину.
2. По методу определения абсолютной скорости корабля - относятся к лагам, основанным на измерении физических величин, связанных с скоростью корабля известными флюктуационными зависимостями.
3. По характеру используемого геофизического поля - используют стационарные поля естественного происхождения (поле Земли).
Известно устройство для определения скорости движения корабля, основанное на измерении акустического сигнала, наиболее близкое по технической сущности заявляемому изобретению. Устройство содержит приемопередающий тракт, включающий генератор, к которому подключен излучатель антенный, а также первую и вторую приемную антенны, причем выход каждой из приемных антенн соединен через соответствующие им усилители с входами первого и второго детекторов соответственно, низкочастотный корреляционный блок для расчетов взаимо-корреляционной функции (ВКФ), низкочастотный корреляционный блок для вычисления значений автокорреляционной функции, блок адаптации и вычислительный блок, использованный с возможностью расчета скорости движения корабля по формуле V=X/2(τ1+ τ2), где X- расстояние между антеннами; при этом выход первого детектора соединен с первым входом первого блока регулируемой временной задержки с возможностью задержки в нем временной задержки τ1 на заданную величину; первый выход первого блока регулируемой временной задержки соединен с первым входом множительного устройства низкочастотного корреляционного блока ВКФ, в котором множительное устройство соединено через первый интегратор с экстремальным регулятором, выход которого параллельно соединен с входом блока адаптации, с возможностью выбора в нем значений временной регулируемой задержки, имеющих величину коэффициента взаимной корреляции в пределах 0,2-0,8 от его максимума, а также с первым входом вычислительного блока; при этом второй вход вычислительного блока соединен со вторым выходом первого блока регулируемой временной задержки, второй вход которого, в свою очередь, соединен с блоком адаптации; кроме того, первый выход второго детектора соединен со вторым входом множительного устройства низкочастотного корреляционного блока ВКФ, а второй выход второго детектора соединен с первым входом второго блока регулируемой временной задержки с возможностью задержки в нем временной задержки т2 на заданную величину, кроме того, третий выход второго детектора соединен с первым входом множительного устройства низкочастотного корреляционного блока АКФ, в котором выход соответствующего множительного устройства соединен со вторым интегратором, выход которого соединен с четвертым входом вычислительного блока; первый выход второго блока регулируемой временной задержки соединен со вторым входом множительного устройства низкочастотного корреляционного блока АКФ, а второй выход второго блока регулируемой временной задержки соединен с третьим входом вычислительного блока, выход которого соединен со вторым входом второго блока регулируемой временной задержки. (Патент на полезную модель № 111633 Российская Федерация, Корреляционный гидроакустический лаг / Аванесов А.А., Верещагин С.А.; патентообладатель Министерство обороны Российской Федерации Федеральное государственное военное образовательное учреждение высшего профессионального образования «Военный учебно-научный центр Военно-Морского Флота «Военно-Морская Академия имени Адмирала Флота Советского Союза Н.Г. Кузнецова» (RU) - 2011133632/28; опубл. 20.12.2011 года)
Однако предыдущая модель с двумя интеграторами (фильтрами низких частот), двумя блоками регулируемых временных задержек, в которых осуществляются независимые переменные задержки двух случайных сигналов с независимыми сигналами управления этими задержками в функциях уровня рабочей точки коррелятора и скорости корабля, потребует достаточно сложного и точного выбора параметров этих устройств с целью обеспечения устойчивости работы всей схемы и обеспечения приемлемой величины флюктуационной погрешности лага, особенно при маневрировании корабля.
Недостатки, присущие прототипу, устранены предлагаемым устройством: «Корреляционный гидроакустический лаг», технической задачей которого является усовершенствование известных технических устройств корреляционных измерителей скорости и разработка нового конструктивного решения, обладающего повышенной точностью определения скорости движения надводных кораблей, подводных лодок и других судов водного транспорта на малых и больших глубинах в условиях разной степени волнения моря.
Реализация указанной технической задачи позволяет достигнуть следующий суммарный технический результат, заключающийся:
- в улучшении конструкционно технологических показателей устройства, что приведет к увеличению точности определения скорости корабля в различных условиях волнения моря;
- в повышении устойчивости работы всей схемы, надежности и быстродействия обработки расчетов при определении скорости корабля, а также в обеспечении приемлемой величины флюктуационной погрешности лага, особенно при маневрировании корабля;
- в увеличении точности определения скорости корабля, благодаря возможности ввода значений поправок лага, определенных на мерной линии.
Для достижения указанного технического результата предложено устройство - «Корреляционный гидроакустический лаг», содержащий приемо-передающий тракт, включающий последовательно соединенные генератор и излучатель антенный, а также первую и вторую приемные антенны, выход каждой из которых соединен через соответствующие им полосовые усилители с входами первого и второго детекторов соответственно, причем выход первого детектора соединен с первым входом блока регулируемой временной задержки τР корреляционного блока АКФ, содержащего также первое множительное устройство, а выход второго детектора соединен с первым входом второго множительного устройства низкочастотного корреляционного блока ВКФ, а также блок адаптации, первый интегратор и второй интегратор, выход которого соединен с первым входом вычислительного блока.
Принципиальным отличием предлагаемого устройства от прототипа является то, что в него дополнительно включен низкочастотный корреляционный блок ВКФ при нулевой временной задержке, состоящий из последовательно соединенных третьего блока дополнительной временной задержки τП и третьего множительного устройства, а также дополнительно включенный в низкочастотный корреляционный блок ВКФ второй блок дополнительной временной задержки τП, выход которого соединен с вторым входом второго множительного устройства, а также дополнительно включенный в корреляционный блок АКФ первый блок дополнительной временной задержки τП, выход которого соединен с первым входом первого множительного устройства корреляционного блока АКФ, а вход соединен с выходом блока регулируемой временной задержки τР, который параллельно соединён с вторым блоком дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ, а также блок сравнения произведений АКФ и ВКФ, первый вход которого соединен с выходом первого множительного устройства корреляционного блока АКФ, а второй вход соединен с выходом второго множительного устройства низкочастотного корреляционного блока ВКФ, при этом выход блока сравнения произведений АКФ и ВКФ соединен с входом второго интегратора, выход которого кроме того соединен со вторым входом блока регулируемой временной задержки τП корреляционного блока АКФ, а также задатчик корректирующих величин (поправок лага), выход которого соединен со вторым входом вычислительного блока; кроме того выход первого детектора параллельно соединен с вторым входом третьего блока дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ при нулевой временной задержке и с вторым входом первого множительного устройства корреляционного блока АКФ, а выход второго детектора соединен с первым входом третьего множительного устройства низкочастотного корреляционного блока ВКФ при нулевой временной задержке, выход которого соединен с входом первого интегратора, выход которого соединен с входом блока адаптации, выход которого параллельно соединен со вторым входом первого блока дополнительной временной задержки τп корреляционного блока АКФ, вторым входом второго блока дополнительной временной задержки τп низкочастотного корреляционного блока ВКФ и вторым входом третьего блока дополнительной временной задержки τп низкочастотного корреляционного блока ВКФ при нулевой временной задержке.
В режиме определения модуля полной скорости первый детектор дополнительно параллельно соединён со вторым блоком дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ, а блок регулируемой временной задержки τР корреляционного блока АКФ соединен только с первым блоком дополнительной временной задержки τР корреляционного блока АКФ.
Такое взаимное расположение конструктивных элементов и их взаимосвязь необходимы для эффективного определения скорости движения корабля относительно дна, определения коэффициента взаимной корреляции огибающих отраженных сигналов, принятых первым и вторым приемными антеннами, которые разнесены вдоль корпуса корабля, и определения скорости корабля, путем деления половины расстояния между приемниками на корреляционную временную задержку, которая определяется по коэффициенту авто корреляции огибающей сигнала от первого приемника, а также суммирования значения этой задержки со значением корреляционной временной задержки. Только после этого производится определение скорости корабля, путем деления половины расстояния между приемниками на сумму величин введенной регулируемой задержки и корреляционной временной задержки.
Именно наличие в заявленном изобретении отличительных от прототипа признаков позволяет определить скорость корабля с повышенной точностью. Кроме того, достигается повышение функциональной устойчивости работы устройства.
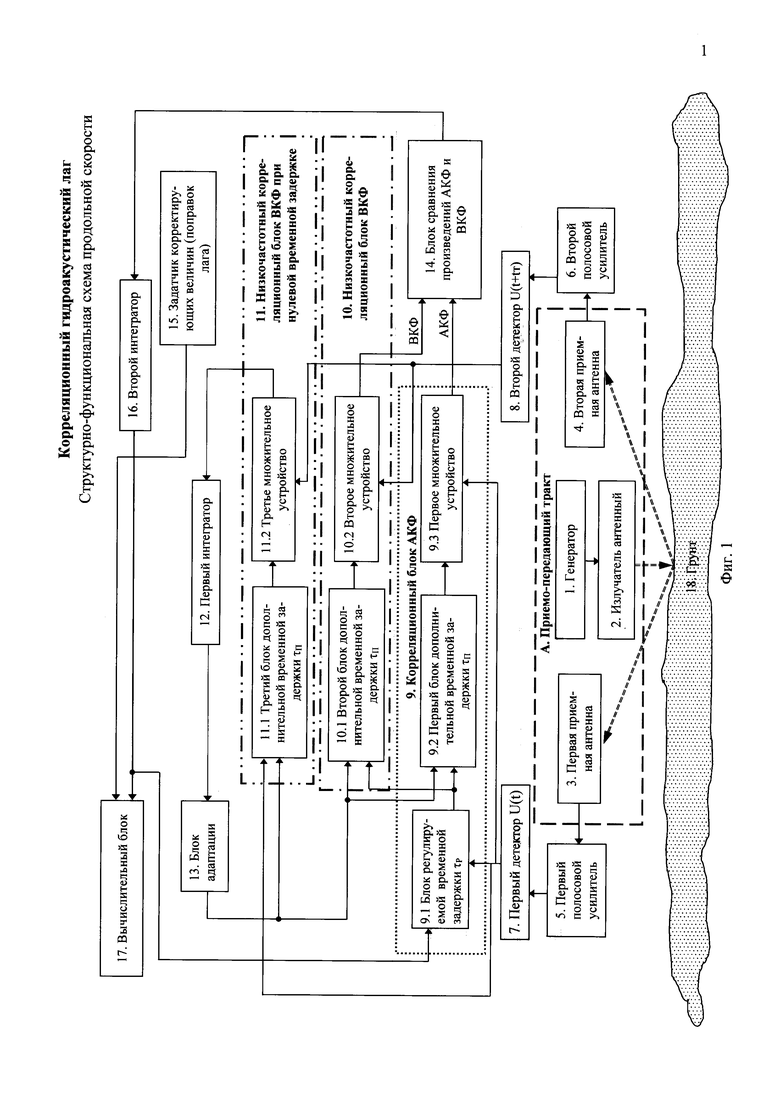
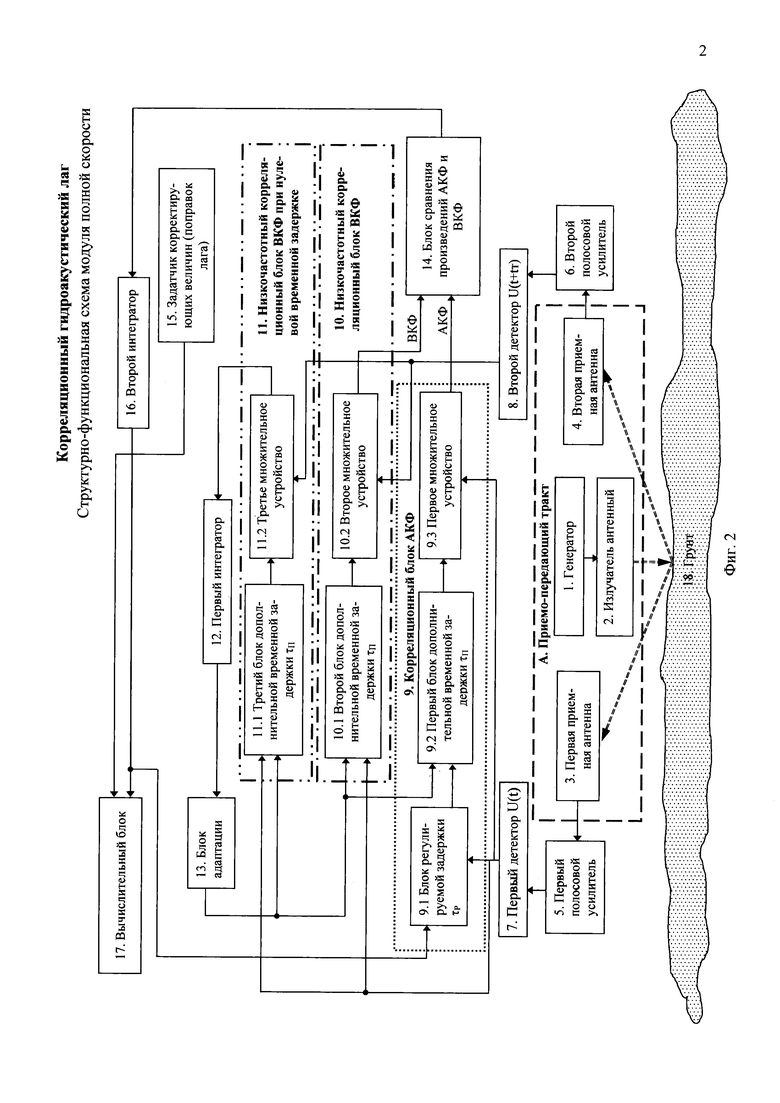
Сущность изобретения поясняется чертежами, которые представлены на фиг. 1 и фиг. 2. На фиг. 1 изображена структурно-функциональная схема корреляционного гидроакустического лага продольной скорости, а на фиг. 2 изображена структурно-функциональная схема корреляционного гидроакустического лага полной скорости.
Структурно-функциональная схема фиг. 1 и фиг. 2 включает:
А. Приемо-передающий тракт КГАЛ.
1. Генератор;
2. Излучатель антенный;
3. Первая приемная антенна (1ПА);
4. Вторая приемная антенна (2 ПА);
5. Первый полосовой усилитель;
6. Второй полосовой усилитель;
7. Первый детектор;
8. Второй детектор;
9. Корреляционный блок АКФ;
9.1 Блок регулируемой временной задержки τР;
9.2 Первый блок дополнительной временной задержки τП;
9.3 Первое множительное устройство;
10. Низкочастотный корреляционный блок ВКФ;
10.1 Второй блок дополнительной временной задержки τП;
10.2 Второе множительное устройство;
11. Низкочастотный корреляционный блок ВКФ при нулевой временной задержке (ВКФ (0));
11.1 Третий блок дополнительной временной задержки τП;
11.2 Третье множительное устройство;
12. Первый интегратор;
13. Блок адаптации;
14. Блок сравнения произведений АКФ и ВКФ;
15. Задатчик корректирующих величин (поправок лага);
16. Второй интегратор;
17. Вычислительный блок;
18. Грунт.
На функциональной схеме продольной скорости приёмно-передающий тракт корреляционного гидроакустического лага (КГАЛ) предназначен для излучения акустических сигналов вертикально вниз к грунту 18 и приема отраженных от дна акустических сигналов, первая приемная антенна 3 и вторая приемная антенна 4 идентичны и расположены в днище корабля, на расстоянии, обусловленном проектом корабля.
Первая приемная антенна 3 предназначена для передачи принятого отраженного от грунта 18 акустического сигнала, который через первый полосовой усилитель 5 и далее через первый детектор 7 поступает на вход блока регулируемой временной задержки 9.1, с возможностью задержки в нем на заданную величину временной задержки τ1, а также на первое множительное устройство 9.3 корреляционного блока АКФ 9 и третий блок дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ при нулевой временной задержке 11.
Вторая приемная антенна 4 предназначена для передачи принятого отраженного от грунта 18 акустического сигнала, который через второй полосовой усилитель 6 поступает далее на второй детектор 8.
Первый выход второго детектора 8 соединен со вторым входом второго множительного устройства 10.2 низкочастотного корреляционного блока ВКФ 10 и со вторым входом третьего множительного устройства 11.2 низкочастотного корреляционного блока ВКФ при нулевой временной задержке 11.
Последовательно соединенные между собой блок регулируемой временной задержки τР 9.1, второй блок дополнительной временной задержки τП 10.1, второе множительное устройство 10.2, в комплексе образуют низкочастотный корреляционный блок ВКФ 10. Блок регулируемой временной задержки τР 9.1, так же соединён со вторым блоком дополнительной временной задержки τП 10.1. Выход второго множительного устройства 10.2 низкочастотного корреляционный блок ВКФ 10 соединен с блоком сравнения произведений АКФ и ВКФ 14.
Последовательно соединенные между собой третий дополнительной временной задержки τП 11.1, третье множительное устройство 11.2, в комплексе образуют низкочастотный корреляционный блок ВКФ 11 при нулевой временной задержке. Выход третьего множительного устройства 11.2 соединен с входом первого интегратора 12. Первый интегратор 12 соединен с первым входом блока адаптации 13, в котором измеренные значения ВКФ сравниваются с назначенными границами диапазона.
Выход блока адаптации 13 соединен со вторым входом первого блока дополнительной временной задержки τП 9.2, вторым входом второго блока дополнительной временной задержки τП 10.1, вторым входом третьего блока дополнительной временной задержки τП 11.1.
Первое и второе множительные устройства соединены через первый и второй входы с блоком сравнения произведений ВКФ и АКФ 14, из которого разностный сигнал АКФ и ВКФ поступает на вход второго интегратора 16. Второй интегратор 16 соединен с вычислительным блоком 17, с которым также соединен через второй вход задатчик корректирующих величин (поправок лага) 15 и с блоком регулируемой временной задержки τР 9.1.
В функциональной схеме модуля полной скорости приёмно-передающий тракт корреляционного гидроакустического лага (КГАЛ) предназначен для излучения акустических сигналов вертикально вниз к грунту 18 и приема отраженных от грунта акустических сигналов, первая приемная антенна 3 и вторая приемная антенна 4 идентичны и расположены в днище корабля, на расстоянии, обусловленном проектом корабля.
Первая приемная антенна 3 предназначена для передачи принятого отраженного от грунта 18 акустического сигнала, который через первый полосовой усилитель 5 и далее через первый детектор 7 поступает на первый вход первого блока регулируемой временной задержки 9.1, с возможностью задержки в нем на заданную величину временной задержки τ1, а также на первое множительное устройство 9.3, второй блок дополнительной временной задержки 10.1 низкочастотного корреляционного блока ВКФ 10 и третий блок дополнительной временной задержки 11.1 низкочастотного корреляционного блока ВКФ при нулевой временной задержке 11.
Вторая приемная антенна 4 предназначена для передачи принятого отраженного от грунта 18 акустического сигнала, который через второй полосовой усилитель 6 поступает далее на второй детектор 8.
Первый выход второго детектора 8 соединен со вторым входом второго множительного устройства 10.2 низкочастотного корреляционного блока ВКФ 10 и со вторым входом третьего множительного устройства 11.2 низкочастотного корреляционного блока ВКФ при нулевой временной задержке 11.
Последовательно соединенные между собой блок регулируемой временной задержки τР 9.1, второй блок дополнительной временной задержки τП 10.1, второе множительное устройство 10.2, в комплексе образуют низкочастотный корреляционный блок ВКФ 10. Выход второго множительного устройства 10.2 соединен с блоком сравнения произведений АКФ и ВКФ 14.
Последовательно соединенные между собой третий блок дополнительной временной задержки τП 11.1, третье множительное устройство 11.2, в комплексе образуют низкочастотный корреляционный блок ВКФ 11 при нулевой временной задержке. Выход третьего множительного устройства 11.2 соединен с входом первого интегратора 12. Первый интегратор 12 соединен с первым входом блока адаптации 13, в котором измеренные значения ВКФ сравниваются с назначенными границами диапазона, поступающими из задатчика уровня ВКФ при нулевом временном сдвиге.
Выход блока адаптации 13 соединен со вторым входом первого блока дополнительной временной задержки τП 9.2, вторым входом второго блока дополнительной временной задержки τП 10.1, вторым входом третьего блока дополнительной временной задержки τП 11.1.
Первое и второе множительные устройства соединены через первый и второй входы с блоком сравнения произведений ВКФ и АКФ 14, из которого разностный сигнал АКФ и ВКФ поступает на вход второго интегратора 16. Второй интегратор 16 соединен с вычислительным блоком 17, с которым также соединен через второй вход задатчик корректирующих величин (поправок лага) 15 и с блоком регулируемой временной задержки τР 9.1.
Устройство работает следующим образом
Представляем алгоритм измерения продольной скорости корабля:
Приёмно-передающий тракт корреляционного гидроакустического лага (КГАЛ) предназначен для излучения акустических сигналов вертикально вниз к грунту 18 и приема отраженных от грунта акустических сигналов, первая приемная антенна 3 и вторая приемная антенна 4 идентичны и расположены в днище корабля, на расстоянии, обусловленном проектом корабля.
Первая приемная антенна 3 предназначена для передачи принятого отраженного от грунта 18 акустического сигнала на первый полосовой усилитель 5 и далее на первый детектор 7.
Вторая приемная антенна 4 предназначена для передачи принятого отраженного от грунта 18 акустического сигнала, который через второй полосовой усилитель 6 поступает далее на второй детектор 8.
Далее для более удобного рассмотрения структуры функционирования устройства, разобьем алгоритм работы на ступени.
Первая ступень. Выделенная огибающая детектированного сигнала (U1(t)) с выхода первого детектора поступает на первый вход блока регулируемой временной задержки 9.1 и первый вход в третьего блока дополнительной временной задержки τП 11.1 при величине τР = 0.
С выхода второго детектора огибающая сигнала U2(t+τT) поступает на вторые входы множительных устройств 10.2 и 11.2.
Так как в приёмных трактах работают схемы АРУ и ВАРУ, то можно считать, что сигналы на выходе детекторов и рассчитанные корреляционные функции будут нормированы.
С выхода третьего блока дополнительной временной задержки τП 11.1 сигнал U1(t+ τП) подаётся на первый вход множительного устройства 11.2. С выхода множительного устройства 11.2 сигнал поступает на интегратор 12. С его выхода сигнал пропорциональный нормированной взаимной корреляционной функции при нулевом временном сдвиге ρU1U2(0) поступает на блок адаптации 14.
Величина ρU1U2(0) служит мерой ширины корреляционных функций и возможности работы ВАКК и ВАКМ способов измерения скорости.
В блоке адаптации 13 полученное значение величины коэффициента ВКФ при нулевом временном сдвиге сравнивается с границами диапазона (0,2 - 0,8)·ρU1U2 и вырабатывается управляющий сигнал, который поступает на второй вход блока дополнительной временной задержки τП 11.1, с целью изменения задержки до величины τП, чтобы на выходе блока 12 получить значение коэффициента ВКФ ρU1U2 в заданных пределах 0,2 - 0,8 (фиг. 1).
Далее эта процедура будет осуществляться в течение всего времени работы лага.
Вторая ступень. Одновременно с получением значения τП в блоке 11.1, обеспечивающего величину коэффициента BKФ при нулевом временном сдвиге в пределах 0,2 - 0,8, такие же задержки по сигналу управления из блока 14 получают в блоках 9.2 и 10.1.
Сигналы с выхода первого детектора, задержанные на величину временной задержки τР поступают также на первые входы блоков дополнительной временной задержки τП 9.2 и 10.1.
Далее сигналы первого детектора, задержанные на суммарную величину временной задержки τР и дополнительной временной задержки τП поступают:
- с выхода блока дополнительной временной задержки τП 9.2 на первый вход множительного устройства 9.3, а на его второй вход поступает сигнал с выхода первого детектора 7;
- с выхода блока второго блока дополнительной временной задержки τП 10.1 на первый вход множительного устройства 10.2, а на второй вход множительного устройства 10.2 поступает сигнал с выхода второго детектора 8.
Таким образом, получены положения уровней рабочих точек слежения ВКФ и АКФ на временной оси, сдвинутые в сторону уменьшения корреляционных задержек на величину τП.
Третья ступень. На выходе вычислительного блока 17 получается разностный сигнал, пропорциональный не сглаженному уровню сигнала слежения, т.е. разности уровней АКФ(τП+τР) и ВКФ(τП+τР).
После прохождения через второй интегратор 16 разностный сигнал пропорциональный величинам коэффициентов АКФ и ВКФ управляет величиной регулируемой временной задержки τР в блоке регулируемой задержки 9.1, так чтобы рабочие точки слежения смещались на величину τР, т.е. к задержке τП добавлялась задержка τР, а коэффициенты АКФ и ВКФ стали бы равны по величине при уровне ВКФ в пределах (0,2 - 0,8) ·ρU1U2.
Следовательно, будут решаться уравнения


Четвёртая ступень. После фиксации равенства коэффициентов АКФ и ВКФ, в блоке 17 вычисляется скорость корабля путем деления половины расстояния между приемными антеннами (1ПА) 3 и (2ПА) 4 на сумму величин временной задержки τР и дополнительной временной задержки τП по формуле
Рассмотрим также вторую модель корреляционного гидроакустического лага модуля полной скорости.
Схема этого режима работы лага (фиг. 2) мало отличается от предыдущей (фиг.1). Однако отличаются алгоритмы функционирования частично второй, а также третьей и четвёртой ступеней.
Вторая ступень. Одновременно с получением значения τП в блоке 11.1, обеспечивающего величину коэффициента BKФ при нулевом временном сдвиге в пределах 0,2 - 0,8, такие же задержки по сигналу управления из блока 14 получают в блоках 9.2 и 10.1.
Сигналы с выхода первого детектора 7 поступают на первый вход второго блока дополнительной временной задержки 10.1, а также, задержанные на величину временной задержки τР, поступают на первый вход первого блока дополнительной временной задержки 9.2.
Далее сигналы первого детектора, задержанные на:
- суммарную величину временной задержки τР и дополнительной временной задержки τП поступают с выхода первого блока дополнительной временной задержки 9.2 на первый вход множительного устройства 9.3, а на его второй вход поступает сигнал с выхода первого детектора 7;
- величину дополнительной временной задержки τП поступают с выхода второго блока дополнительной временной задержки 10.1 на первый вход множительного устройства 10.2, а на его второй вход поступает сигнал с выхода второго детектора 8.
Таким образом, получены положения уровней рабочих точек слежения ВКФ и АКФ на временной оси, сдвинутые в сторону уменьшения корреляционных задержек на величину τП.
Третья ступень. На выходе блока сравнения произведений АКФ и ВКФ 14 получается разностный сигнал, пропорциональный не сглаженному уровню сигнала слежения, т.е. разности уровней АКФ(τП+τР) и ВКФ(τП).
После прохождения через второй интегратор 16 разностный сигнал пропорциональный величинам коэффициентов АКФ и ВКФ управляет величиной регулируемой временной задержки τР в блоке регулируемой задержки 9.1, так чтобы рабочие точки слежения смещались на величину τР, т.е. к задержке τП добавлялась задержка τР, а коэффициенты АКФ и ВКФ стали бы равны по величине при уровне ВКФ(0) в пределах (0,2 - 0,8) ·ρU1U2.
Следовательно, будут решаться уравнения

Четвёртая ступень. После фиксации временной задержки при равенстве коэффициентов АКФ и ВКФ, вычисляется скорость корабля путем деления половины расстояния между приемными антеннами (1ПА) 3 и (2ПА) 4 на сумму величин временной задержки τР и дополнительной временной задержки τП по формуле

Выражения для задержек соответственно равны выражениям

При величине угла сноса С = 0° эти выражения соответственно будут иметь вид:
Такое построение схемы лага:
- разделяет процедуры подстройки уровня ВКФ при нулевом временном сдвиге и другие процессы;
- упрощается схема осреднения сигнала слежения в рабочей точке слежения за уровнем АКФ(τП+τР) = ВКФ(τП);
- имеется возможность ввода корректуры при тарировке лага на мерной линии.
Таким образом, заявленное изобретение «Корреляционный гидроакустический лаг» является универсальным устройством для повышения точности измерения скорости движения надводных кораблей, подводных лодок и других судов водного транспорта на малых и больших глубинах в различных условиях волнения моря.
Заявленное устройство промышленно применимо, так как для его реализации используются широко распространенные компоненты и изделия промышленности, такие как приемники акустических сигналов, полосовые усилители, детекторы, блоки регулируемой задержки, множительные устройства, интеграторы и другие электронно-измерительные приборы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2040010C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКИХ СРЕДАХ | 1992 |
|
RU2020429C1 |
| Устройство для определения корреляционной функции переходных характеристик широкополосных фильтров | 1987 |
|
SU1495813A1 |
| ПЕЛЕНГАТОР | 1990 |
|
RU2012010C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2042960C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ КОРАБЛЯ ОТНОСИТЕЛЬНО ДНА МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1977 |
|
SU1840287A1 |
| УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ШКАЛ ВРЕМЕНИ | 1992 |
|
RU2046393C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
Изобретение относится к гидроакустике, а точнее к навигационным устройствам, конкретно к лагам, и может быть использовано для повышения точности измерения скорости движения надводных кораблей, подводных лодок и других судов водного транспорта на малых и больших глубинах. Предлагаемое изобретение позволяет достигнуть следующий технический результат: - улучшение конструкционно технологических показателей устройства, повышение устойчивости работы всей схемы, возможность ввода значений поправок лага, определенных на мерной линии, приведут к увеличению точности определения скорости корабля при маневрировании в различных условиях волнения моря. Принципиальным отличием предлагаемого устройства от прототипа является то, что в него дополнительно включен низкочастотный корреляционный блок ВКФ при нулевой временной задержке, состоящий из последовательно соединенных третьего блока дополнительной временной задержки τП и третьего множительного устройства, а также дополнительно включенный в низкочастотный корреляционный блок ВКФ второй блок дополнительной временной задержки τП, выход которого соединен со вторым входом второго множительного устройства, а также дополнительно включенный в корреляционный блок АКФ первый блок дополнительной временной задержки τП, выход которого соединен с первым входом первого множительного устройства корреляционного блока АКФ, а вход соединен с выходом блока регулируемой временной задержки τР, который параллельно соединён со вторым блоком дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ, а также блок сравнения произведений АКФ и ВКФ, первый вход которого соединен с выходом первого множительного устройства корреляционного блока АКФ, а второй вход соединен с выходом второго множительного устройства низкочастотного корреляционного блока ВКФ, при этом выход блока сравнения произведений АКФ и ВКФ соединен с входом второго интегратора, выход которого, кроме того, соединен со вторым входом блока регулируемой временной задержки τП корреляционного блока АКФ, а также задатчик корректирующих величин (поправок лага), выход которого соединен со вторым входом вычислительного блока; кроме того, выход первого детектора параллельно соединен со вторым входом третьего блока дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ при нулевой временной задержке и со вторым входом первого множительного устройства корреляционного блока АКФ, а выход второго детектора соединен с первым входом третьего множительного устройства низкочастотного корреляционного блока ВКФ при нулевой временной задержке, выход которого соединен с входом первого интегратора, выход которого соединен с входом блока адаптации, выход которого параллельно соединен со вторым входом первого блока дополнительной временной задержки τП корреляционного блока АКФ, вторым входом второго блока дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ и вторым входом третьего блока дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ при нулевой временной задержке. В режиме определения модуля полной скорости первый детектор дополнительно параллельно соединён со вторым блоком дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ, а блок регулируемой временной задержки τР корреляционного блока АКФ соединен только с первым блоком дополнительной временной задержки τР корреляционного блока АКФ. 2 з.п. ф-лы, 2 ил.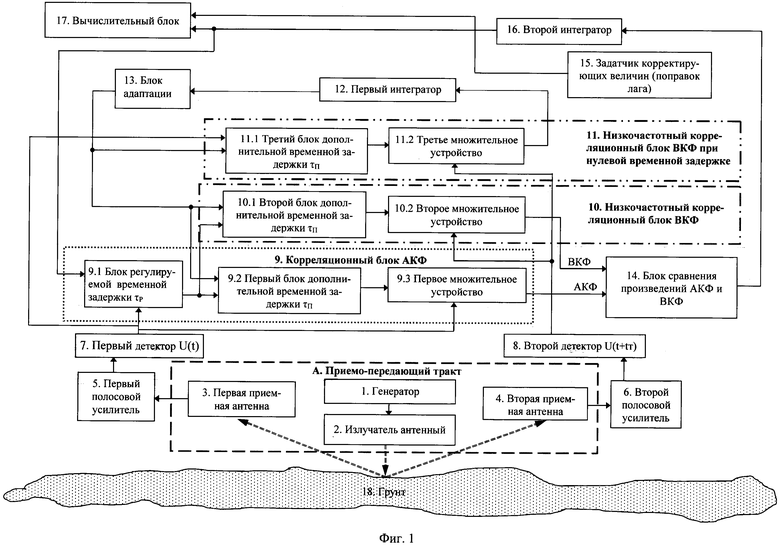
1. Корреляционный гидроакустический лаг, содержащий приемо-передающий тракт, включающий последовательно соединенные генератор и излучатель антенный, а также первую и вторую приемные антенны, выход каждой из которых соединен через соответствующие им полосовые усилители с входами первого и второго детекторов соответственно, причем выход первого детектора соединен с первым входом блока регулируемой временной задержки τР корреляционного блока АКФ, содержащего также первое множительное устройство, а выход второго детектора соединен с первым входом второго множительного устройства низкочастотного корреляционного блока ВКФ, а также блок адаптации, первый интегратор и второй интегратор, выход которого соединен с первым входом вычислительного блока, отличающийся тем, что в него дополнительно включен низкочастотный корреляционный блок ВКФ при нулевой временной задержке, состоящий из последовательно соединенных третьего блока дополнительной временной задержки τП и третьего множительного устройства, а также дополнительно включенный в низкочастотный корреляционный блок ВКФ второй блок дополнительной временной задержки τП, выход которого соединен со вторым входом второго множительного устройства, а также дополнительно включенный в корреляционный блок АКФ первый блок дополнительной временной задержки τП, выход которого соединен с первым входом первого множительного устройства корреляционного блока АКФ, а вход соединен с выходом блока регулируемой временной задержки τР, который параллельно соединён со вторым блоком дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ, а также блок сравнения произведений АКФ и ВКФ, первый вход которого соединен с выходом первого множительного устройства корреляционного блока АКФ, а второй вход соединен с выходом второго множительного устройства низкочастотного корреляционного блока ВКФ, при этом выход блока сравнения произведений АКФ и ВКФ соединен с входом второго интегратора, выход которого, кроме того, соединен со вторым входом блока регулируемой временной задержки τП корреляционного блока АКФ, а также задатчик корректирующих величин (поправок лага), выход которого соединен со вторым входом вычислительного блока; кроме того, выход первого детектора параллельно соединен со вторым входом третьего блока дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ при нулевой временной задержке и со вторым входом первого множительного устройства корреляционного блока АКФ, а выход второго детектора соединен с первым входом третьего множительного устройства низкочастотного корреляционного блока ВКФ при нулевой временной задержке, выход которого соединен с входом первого интегратора, выход которого соединен с входом блока адаптации, выход которого параллельно соединен со вторым входом первого блока дополнительной временной задержки τп корреляционного блока АКФ, вторым входом второго блока дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ и вторым входом третьего блока дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ при нулевой временной задержке.
2. Устройство по п.1, отличающееся тем, что в режиме определения модуля полной скорости первый детектор дополнительно параллельно соединён со вторым блоком дополнительной временной задержки τП низкочастотного корреляционного блока ВКФ, а блок регулируемой временной задержки τР корреляционного блока АКФ соединен только с первым блоком дополнительной временной задержки τР корреляционного блока АКФ.
3. Устройство по п.1, отличающееся тем, что имеется возможность ввода корректуры при тарировке лага на мерной линии.
| Устройство для срезания веток с деревьев | 1957 |
|
SU111633A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1993 |
|
RU2072526C1 |
| Устройство для передачи распорядительных сигналов из центрального пункта нескольким установкам | 1931 |
|
SU27863A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1972 |
|
SU1840737A1 |
| УСТРОЙСТВО для УСТРАНЕНИЯ ИСКАЖЕНИЙ | 0 |
|
SU166051A1 |
| WO 1997047990 A1, 18.12.1997 | |||
| US 4244026 A1, 06.01.1981. | |||

