Изобретение относится к вычислительной технике и может использоваться в системе обработки изображения, в частности в устройстве выделения краев (контуров) системы обработки изображения с использованием многорежимных линейных пороговых логических элементов.
В системе обработки сигнала изображения, что является наиболее важной областью применения изобретения, рекомендуется предварительная обработка, потому что она улучшает точность выделения векторов движения путем удаления из изображения нежелательных факторов, таких, как шум. Предварительная обработка снижает также вычислительную нагрузку путем преобразования изображения с полным разрешением, представленным обычно восьмью битами на точку, в другой тип изображения, представленным менее чем восьмью битами на точку.
Для вышеупомянутой цели было предложено несколько видов предварительной обработки. Например, Уомори и др. в работе Система автоматической стабилизации изображения путем полной цифровой обработки сигнала, опубликованной в [1] , использовали способ полосового выделения представительных точек (BERP), который можно рассматривать как способ полосовой фильтрации. Хотя с помощью способа BERP можно эффективно отфильтровать как самые высокочастотные пространственные составляющие, такие, как шум, так и низкочастотную составляющую, например плоскую область в интенсивности, для получения BERP изображения все еще требуется более двух битов на точку. Однако информация о выделенном крае может быть представлена одним битом на точку. Соответственно и способ выделения краев может упростить аппаратное обеспечение. Существуют различные подходы к выделению краев, такие, как использование пространственных градиентов изображения, использование лапласиана, использование разностей средних, согласование или аппроксимация с заранее определенным изображением, и выделение в изображении нулевых пересечений, отфильтрованных при помощи лапласиана по гауссиану (LOG) в изображении.
Основной недостаток выделения краев с первого по четвертый способами заключается в том, что эти способы работают хорошо только с некоторыми типами изображений, но в присутствии шума выделение краев значительно ухудшается вследствие выделения ими высокочастотной составляющей из сигнала изображения. Пятый способ осуществляет эффективное уменьшение шума, но при этом его потенциальный недостаток заключается в увеличении вычислительной нагрузки для удаления шума, т.е. в способе нужно применять усиленную низкочастотную фильтрацию для полного выделения краев, поскольку шум и краевая информация располагаются в различных высокочастотных диапазонах. Поэтому для выделения краев надо увеличить размер окна.
Известно также устройство выделения краев для системы обработки изображения, содержащее блок оперативной памяти, первый вход которого объединен с входом блока построчной задержки и является информационным входом устройства, причем первый - (l-1)-й выходы блока построчной задержки (l≥3) соединены соответственно с вторым - l-м входами блока оперативной памяти, выходы которого подключены к входам блока вычисления среднего значения, и блок принятия решения, выход которого является выходом устройства [2].
Недостатками устройства являются его сложное аппаратное обеспечение и невозможность работы в реальном масштабе времени.
Целью изобретения является уменьшение шумов устройства без увеличения размеров окна.
Другой целью изобретения является упрощение аппаратного обеспечения устройства и обеспечение возможности его работы в реальном масштабе времени.
Для этого в устройство выделения краев введены первый-четвертый перемножители и шифратор состояний, информационные входы которого подключены к соответствующим выходам блока оперативной памяти, при этом выход блока вычисления среднего значения соединен с входом среднего значения шифратора состояний, опорный вход которого является входом задания шумового порога устройства, выходы шифратора состояний подключены к соответствующим входам первого-четвертого перемножителей, выходы которых соответственно соединены с первым-четвертым информационными входами блока принятия решения, опорный вход которого является входом задания порога различения устройства.
На фиг. 1 показано прохождение сигнала устройства выделения краев системы обработки изображения согласно изобретению; на фиг. 2 изображена структурная схема устройства выделения краев согласно изобретению; на фиг.3 - структурная схема устройства выделения краев согласно изобретению, предпочтительный вариант; на фиг.4 - структурная схема блока кодирования устройства выделения краев согласно изобретению; на фиг. 5-8 показаны предварительно определенные краевые комбинации, используемые для получения скалярного произведения в изобретении; на фиг. 9 дана схема для выполнения скалярного произведения W1˙V перемножителем устройства выделения краев согласно изобретению; на фиг.10 - схема для выполнения скалярного произведения W2˙V перемножителем устройства выделения краев согласно изобретению; на фиг.11 - схема для выполнения скалярного произведения W3˙V перемножителем устройства выделения краев согласно изобретению; на фиг.12 - схема для выполнения скалярного произведения W4˙V перемножителем устройства выделения краев согласно изобретению; на фиг.13 представлена таблица истинности для результата скалярного произведения W и V устройства выделения краев согласно изобретению; на фиг.14 - карта Карно и характеристическое уравнение для получения скалярного произведения в устройстве выделения краев согласно изобретению; на фиг.15 - принципиальная логическая схема блока вычисления модуля в перемножителе устройства выделения краев согласно изобретению; на фиг.16 - принципиальная логическая схема блока принятия решения устройства выделения краев согласно изобретению; на фиг.17 - временная диаграмма для объяснения работы устройства выделения краев согласно изобретению.
Изобретение основано на линейной разделимости многорежимной линейной пороговой логики, которая может быть объяснена с помощью следующих определений и теоремы.
Линейная разделимость двоичных входных данных обсуждена в работе Пороговая логика (P.M.Lewis, 11, C.L.Coates, изд-во John Wiley and Sons, 1967). Определение линейной разделительной функции многорежимных входных данных дается впервые.
Пусть Р есть множество L-мерных векторов. Каждая составляющая любого вектора в Р принимает одно из значений
М = j + K + 1 в {-j,...,-1,0, 1,...,k} т.е.
P={X/Xi∈{-j, ... , -1,0,1, ..., k}, i=1, ..., L} .
Далее количество различных векторов в Р становится равным ML, и определяют -j и k как экстремальные значения состояния ввода.
Пусть Ро и Р1 - два взаимоисключающих подмножества множества Р, так что Ро U Р1= = Р.
Если дан весовой вектор W, то логическая функция F определяется как
F(X)=
 где 0 является пороговым значением и принадлежит к линейно разделительному классу, тогда и только тогда, когда WтX>WтY, ∀X∈P1 и ∀Y∈P0.
где 0 является пороговым значением и принадлежит к линейно разделительному классу, тогда и только тогда, когда WтX>WтY, ∀X∈P1 и ∀Y∈P0.
Анализ многорежимной линейной разделимости является в целом сложной задачей. Однако специальный класс логических функций, который использован в предлагаемом детекторе краев, является линейно разделимым согласно следующей теореме.
Пусть Х является L-мерным вектором входных данных, все составляющие которого являются экстремальными значениями, и пусть
Р1 = {X} и Ро = О - {X}, т.е.
P1={X/Xi∈{-j,k} i=1, ..., L} и P0=P-P1.
Тогда существует линейно разделимая функция Р, которая отделяет вектор входных данных Х от других.
Доказательство вышеприведенной теоремы следующее.
Доказывают эту теорему, используя вышеприведенное определение и показывая, что существует весовой вектор W, который удовлетворяет условиям
WтX>WтY, ∀X∈P1 и ∀Y∈P0.
Рассматривают следующий весовой вектор:
Wi=
 , i=1, ..., L .
, i=1, ..., L .
Тогда имеет место следующее неравенство:
WiXi ≥WiYi, ∀i
Суммируя эти неравенства для i = 1,..., L, имеют
WтХ > WтY, потому что по крайней мере для одной i равенство не выполняется.
Также можно рассмотреть множество Р-1 = {X}. Тогда имеют вид многоразрядной дискриминантной функции многорежимных входных данных, таких, как
Wт(-X)<WтY<WтX, ∀Y∈P0.
Для использования многорежимной линейной пороговой логики для выделения краев необходимо преобразовать непрерывное значение интенсивности точки в несколько дискретных состояний.
Применяют локальное окно 1 х 1 для выделения края данной точечной позиции. Допускают, что размер изображения h = n x n.
Пусть Xi, i = 1,..., r - i-e значение точки в лексикографически упорядоченном изображении и Zj, j = 1,..., r, - j-е значение точки в лексикографически упорядоченных значениях точек внутри локального окна с центром в Xi, где r = l x l. Тогда для локального окна, соответствующего Xi, Zj может быть получено путем преобразования:
Zj = Xk, j = 1,...,r где k = i +{[j-1)/l] - [l/2]}n2 + {(j-1)mоdl - [l/2]}.
Обозначение [l/2] означает целую часть результирующего деления, а imodl уравнивает значение остатка от деления целого i на целое l.
После получения одномерной матрицы Zj локальное среднее, соответствующее i-й точке, равняется
Mi=  Zj.
Zj.
Затем состояние для j-го входного значения в многорежимной линейной пороговой логике определяется как
Vj=  -ε гдеε является гарантией против шумовых данных. Чем больше количество шума, которое должно подавляться, тем больше должно быть ε .
-ε гдеε является гарантией против шумовых данных. Чем больше количество шума, которое должно подавляться, тем больше должно быть ε .
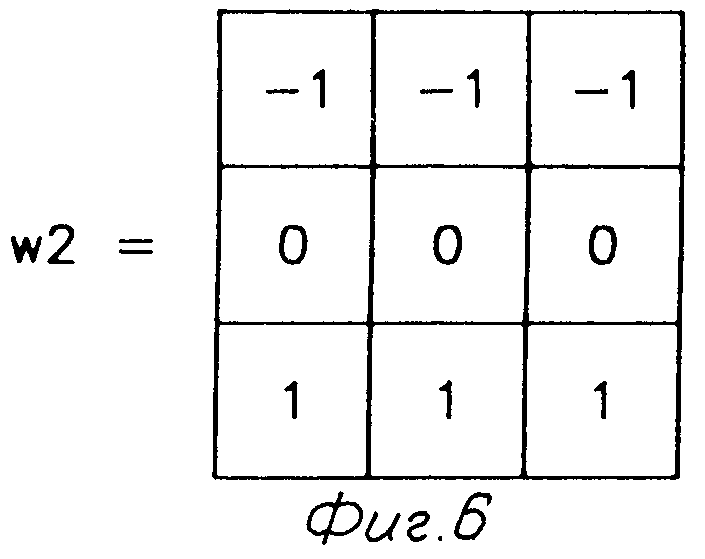
Определяют четыре пары двунаправленных краев, чьими направлениями являются О и 180, 90 и 270, 45 и 225, и 135 и 315о соответственно.
Во-первых, правый край определяется восходящими состояниями ввода справа налево в локальном окне. Например, для l = 3 правый край и дополняющий его по направлению левый край соответственно определяются как

 и
и 


 где х представляет собой безразличное состояние.
где х представляет собой безразличное состояние.
Вторая пара краев, обозначенных верхним и нижним краями, определяется тем же путем, т.е.


 и
и 


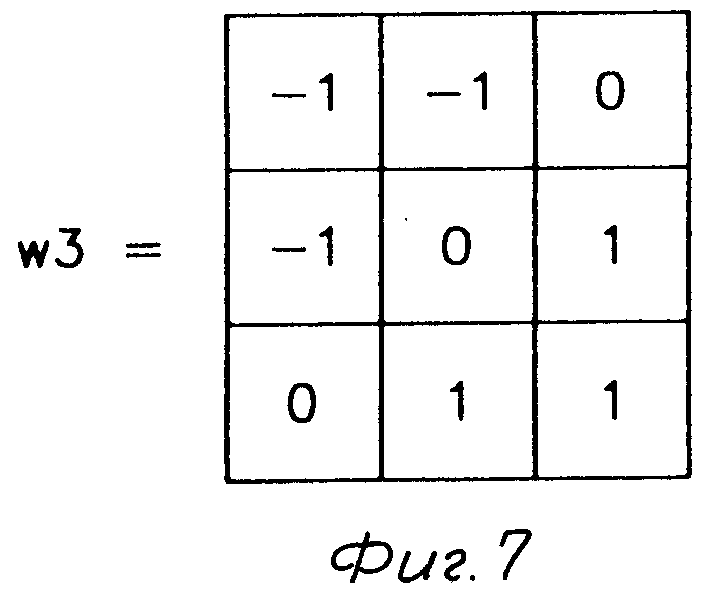
Третья пара краев, обозначенных верхним правым и нижним левым краями, определяется как

 и
и 


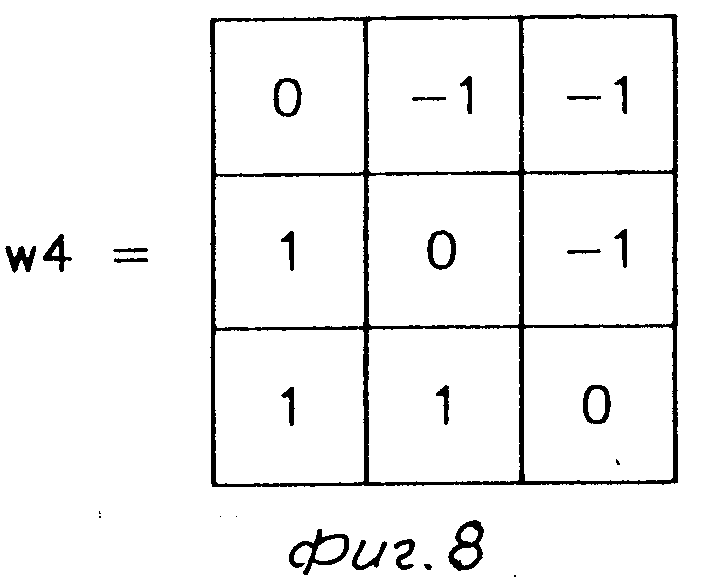
Наконец, четвертая пара краев, обозначенных левым верхним и правым нижним краями, определяется как

 и
и 


Для l = 5 правый край, например, имеет 1 в первом столбце, -1 в последнем столбце и х (безразличный) в остальных столбцах.
Используя вышеприведенную многоразрядную дискриминантную функцию
(Wт(-1)<WтY<WТX, ∀Y∈P0, ,как правый, так и левый края могут быть определены одним и тем же весовым вектором, обозначенным W-, поскольку они образованы экстремальными значениями, и левый край равен правому краю с противоположным знаком. Таким же образом верхний и нижний края, правый верхний и левый нижний края и левый верхний и правый нижний края определяются W1, W/ и W соответственно. Как показано в вышеописанной теореме, один возможный весовой вектор для выделения правого или левого края, например l =3, равен
W- ={1 x -1 1 x -1 1 x -1]т
Из этого равенства ясно, что остальные весовые векторы, такие, как W1, W/ и W , могут быть получены путем соответствующего упорядочения элементов W-.
С другой стороны, для получения весового вектора может также применяться LMS алгоритм.
В соответствии с вышеприведенным определением краев край выделяется путем применения операции ИЛИ над выходными данными четырех многорежимных линейных пороговых логических схем с определенной последовательностью весовых векторов. Полная процедура выделения краев описывается с помощью следующего алгоритма: выбрать размер локального окна l, для i = 1,...,n, сформировать Z, вычислить состояние ввода V, установив Vo = 1, вычислить четыре скалярных произведения; W-т.V, W1т.V, W/т.V и W т.V.
Если по крайней мере одно из них больше или равно выходному пороговому уровнюθ или меньше или равно -θ , то выход схемы ИЛИ равен 1, и край выделяется в позиции i, т.е. края нет.
При выполнении вышеописанного алгоритма используется нелинейная функция g:
g(u)= U
U гдеθ является пороговым значением.
гдеθ является пороговым значением.
Значениеθ установлено равным шести, когда применяется вышеописанный весовой вектор.
Учитывая выбор размера маски, должны приниматься во внимание следующие результаты. Чем больше размер маски, тем лучше воздействие на шум благодаря операции локального усреднения вышеописанного алгоритма. Однако существует два недостатка при увеличении размера маски, такие, как трудности в выделении краев в направлениях, отличных от 0, 45, 90, 135, 180, 225, 270 и 315о, и поскольку требуется больше входных данных для многорежимной линейной пороговой логической схемы, требуется и больше вычислений и межсоединений. Показано, что размер маски l = 3, совпадающий с таким же окном, является наиболее чувствительным для выделения краев в любом направлении, потому что оно является наименьшим симметричным окном.
При использовании фиг.1 может быть реализовано программное выполнение В первом шаге В1 символ i означает лексикографически упорядоченную позицию точки. Во втором шаге В2 устанавливаются соседи Zj, j = 1,..., m, локального заранее установленного изображения в i-й точке Xi. В третьем шаге В3 Zj представляет собой набор точек в локальном окне, включая i-ю точку Хi, где m - количество точек в локальном окне. Также в третьем шаге Zj, j = 1,. .., m, преобразуются в соответствующие многорежимные значения Vj, j = 1,... , m. В четвертом шаге В4 V = [V1,..., Vm]т сравнивается с заранее определенными краями W1, W2, W3 и W4 соответственно. В пятом шаге В5, если V совпадает по крайней мере с одним из заранее определенных краев W1, W2, W3 и W4 в шестом шаге В6, i-я точка Хi принимается как край. В противном случае в седьмом шаге В7 i-я точка Хi принимается не как край. В восьмом шаге В8, если i-я точка Хi (элемент изображения) не является итоговой точкой (элементом изображения), то в девятом шаге В9 i увеличивается на единицу и процесс возвращается к второму шагу В2 и выполняет основной цикл повторно. В противном случае на восьмом шаге В8 выполнение останавливается.
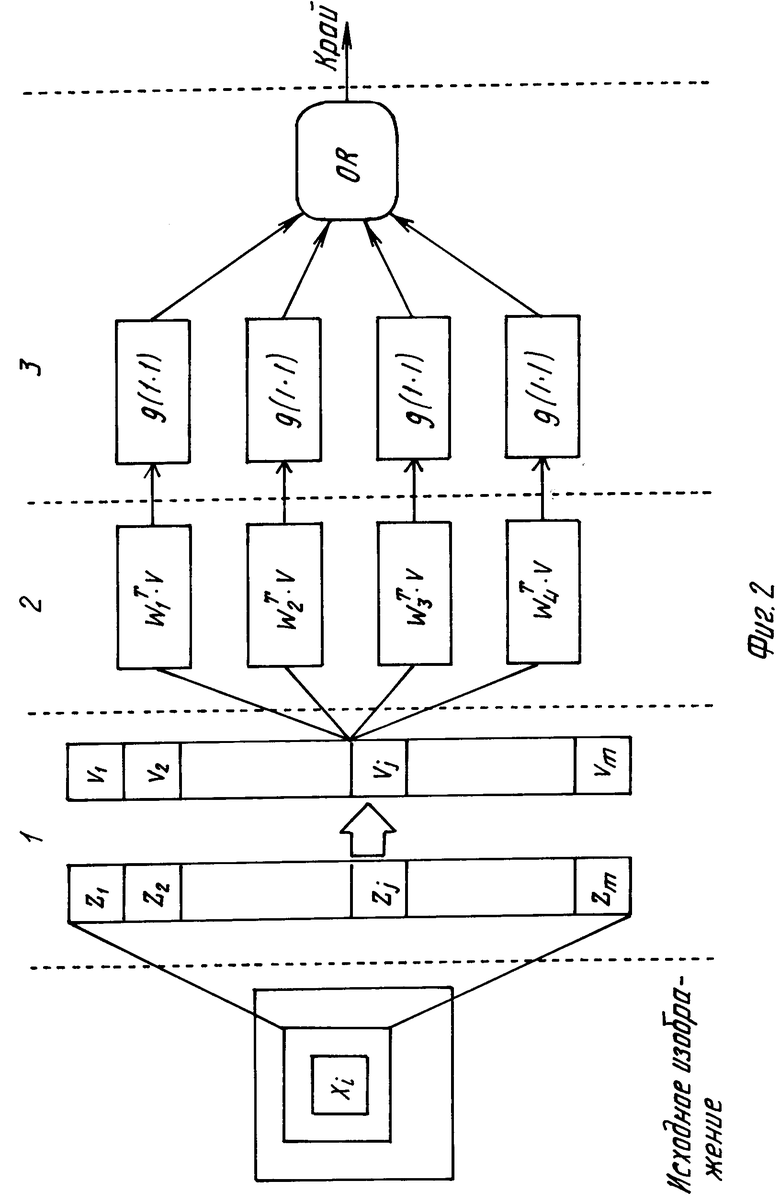
Устройство выделения краев (фиг. 2) содержит блок 1 кодирования для преобразования лексикографически упорядоченных данных Z1,...,Zm в многорежимные V1, ...,Vm после лексикографического упорядочения исходных данных изображения Хi путем использования локального окна, блок 2 сопоставления для выполнения скалярного произведения над многорежимными данными V1,...,Vm и заранее определенными краями W1, W2, W3 и W4, соответствующими W-, W1, W/ и W соответственно, и блок 3 принятия решения для сравнения соответствующих результирующих данных скалярного произведения с выходным пороговым значением, обработки результатов сравнения с помощью схемы ИЛИ и принятия решения, являются ли исходные данные изображения Хi краем или нет.
Вышеописанные блоки выполняют следующие функции.
Во-первых, для принятия решения, являются ли исходные данные изображения Хi краем или нет, путем корреляции соседних точек (элементов изображения) требуется понятие окна. Так, блок 1 кодирования переводит в одномерные соседние точки Z1, Z2,...,Zm, устанавливают среднее значение, имеющее значение яркости, и преобразует соседние точки Z1, Z2,..., Zm в соответствующие многорежимные значения V1, V2,..., Vm. Если Vj, j = 1,...,m, имеет М состояний (М > >2), то требуется [log2M] для представления Vj. Обозначение [log2M] обозначает log2M, если М кратно двум, в противном случае это обозначает целую часть log2M+1. Здесь же путем ввода среднего значения и параметра управления шумомε блок сопоставления отделяет соответствующие точки на три уровня, которые имеют значение выше среднего +ε , значение ниже среднего - ε и значение между + ε и -ε соответственно. Выделение шума производится эффективно согласно параметру ε.
Блок 2 сопоставления вырабатывает степень сравнения преобразованных данных изображения с четырьмя заранее определенными типами краев соответственно, т.е. он выполняет скалярное произведение над преобразованными данными изображения V1, V2,...,Vm; V и соответствующими четырьмя заранее определенными типами краев: W1, W2, W3, W4, которые определяются в соответствии с горизонтальным, вертикальным и двумя диагональными направлениями. Здесь, W-т.V представляет собой скалярное произведение над преобразованными данными изображения V1, V2,...,Vm; V и заранее определенным типом края W-, которое определяется в соответствии с горизонтальным направлением. Обработка в реальном времени, которая основана на системе обработки изображения, может быть реализована путем выполнения операции четырех скалярных произведений одновременно.
Блок 3 принятия решений выполняет функцию, которая сравнивает выходные значения скалярных произведений W1т.V, W2т.V, W3т.V, W4т.V соответственно с данной константой, и принимает решения о наличии края, если по крайней мере одно из выходных значений больше, чем данная константа, Данная константа для сравнения с выходными значениями скалярных произведений может вычисляться пользователем путем использования микрокомпьютера.
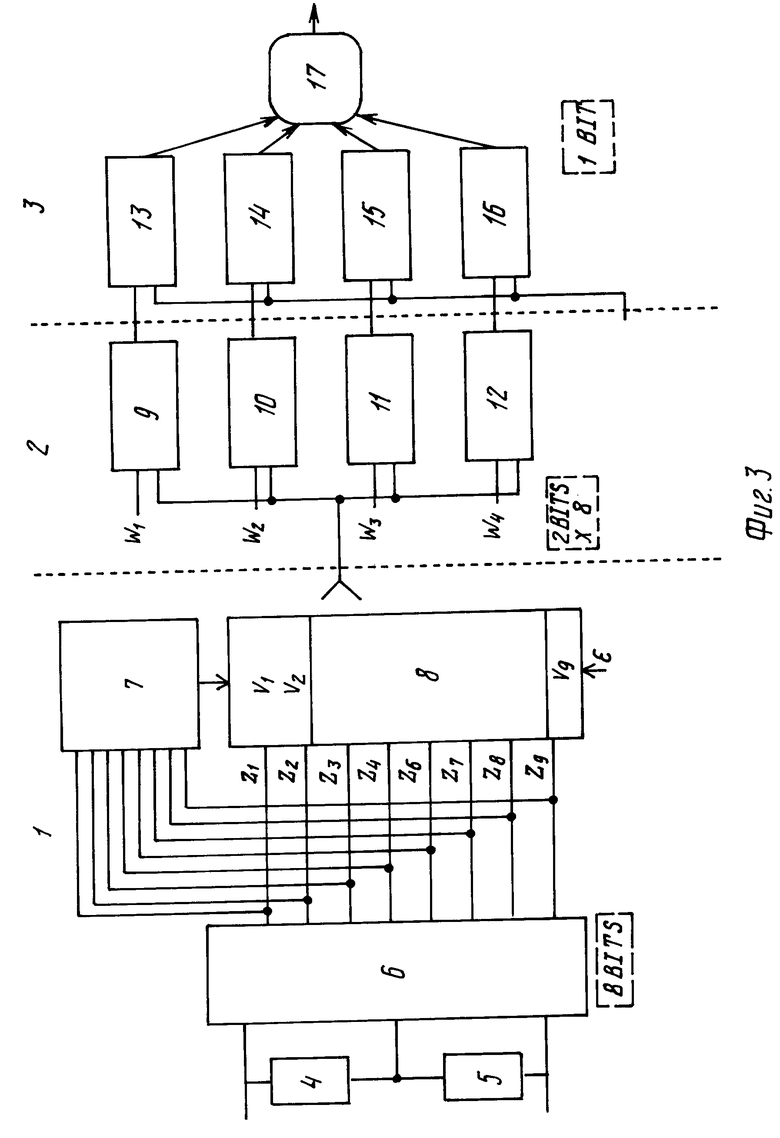
На фиг.3 в предпочтительном варианте устройства выделения краев согласно изобретению блок 1 кодирования содержит первый элемент 4 задержки для выдачи сигнала, задержанного на одну горизонтальную строку сигнала входных данных изображения, второй элемент 5 задержки, последовательно соединенный с первым элементом 4 задержки, для выдачи сигнала, задержанного на две горизонтальные строки, блок 6 оперативной памяти, формирующий окно размером 3 x3, который соединен с входом устройства и выходами первого и второго элементов 4 и 5 задержки для записи данных девяти точек в схеме локального окна 3 х 3, блок 7 вычисления среднего для получения среднего значения данных восьми точек, за исключением данных центральной точки в локальном окне 3 х 3, и шифратор 8 состояний для разделения соответствующих данных восьми точек на три уровня путем использования среднего значения и данного порогового значенияε и преобразования данных о восьми точках в коды, соответствующие трем уровням. Блок 2 сопоставления содержит перемножители 9-12 для выполнения скалярного произведения над соответствующими заранее определенными краями W1, W2, W3 и W4 и над выходами шифратора 8. Блок 3 принятия решения содержит компараторы 13-16 для сравнения выходов от соответствующих перемножителей 9-12 с данной константой и выдачи сигнала сопоставления, а также элемент ИЛИ 17 для логического сложения выходов от компараторов 13-16.
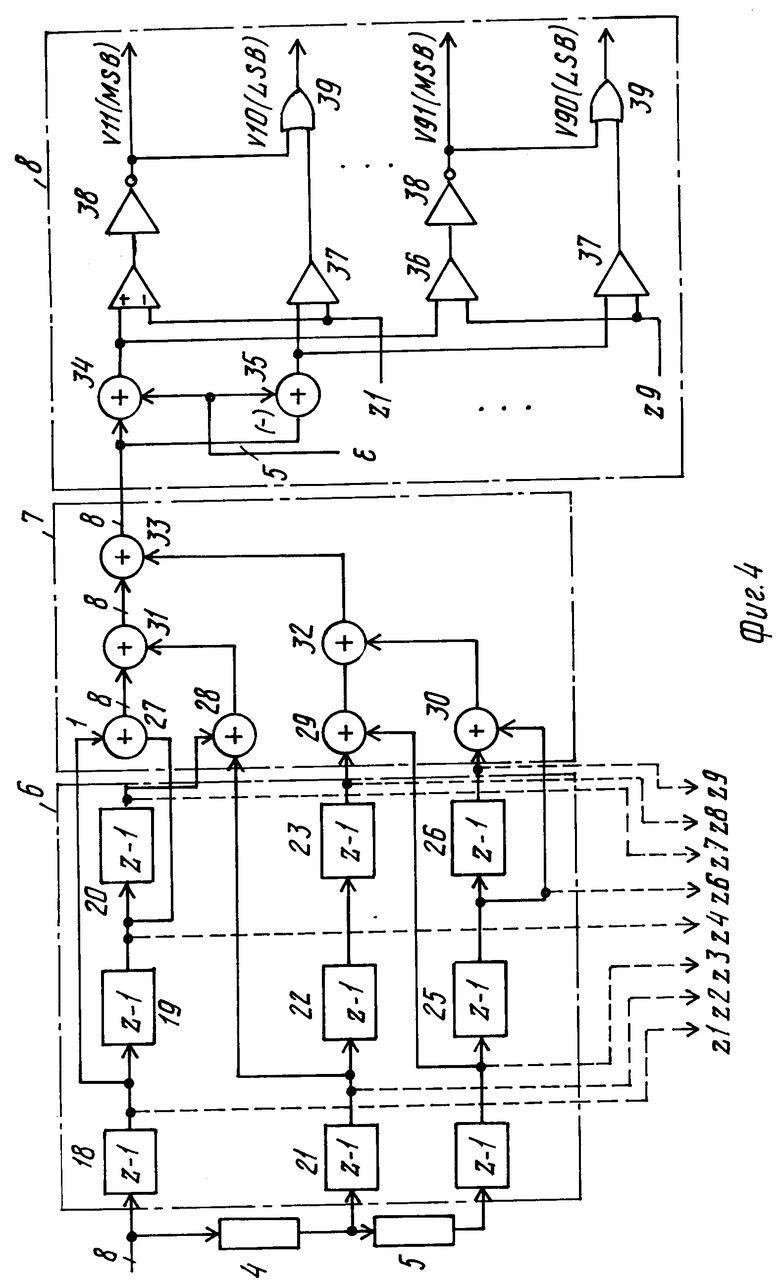
На фиг. 4 в предпочтительном варианте блока 1 кодирования блок 6 оперативной памяти содержит три регистра 18, 19 и 20 сдвига, включающих совокупность восьми параллельно подключенных триггеров D-типа и последовательно подключенных к входу для ввода последовательно считанного цифрового видеосигнала, представленного восьмью битами, три регистра 21, 22, 23 сдвига включающих совокупность восьми параллельно соединенных триггеров D-типа и последовательно подключенных к выходу первого элемента 4 задержки для ввода сигнала, задержанного на одну строку, и три регистра 24, 25, 26 сдвига включающих совокупность восьми параллельно соединенных триггеров D-типа и последовательно подключенных к выходу второго элемента 5 задержки для ввода сигнала, задержанного на две строки. В блоке 6 данные девяти точек записываются в схему окна 3 х 3. Блок 7 вычисления среднего значения содержит сумматоры 27-30 для суммирования по два выходных сигнала от восьми регистров 18-21 и 23-26, за исключением выходного сигнала от одного регистра 22, сумматоры 31, 32 для суммирования попарно сигналов, остающихся после отбрасывания самого младшего разряда LSB от выходных сигналов сумматоров 27-30, и сумматор 33 для суммирования сигналов, оставшихся после отбрасывания самого младшего разряда LSB от выходных сигналов сумматоров 31, 32 и для выдачи сигнала, оставшегося после отбрасывания самого младшего разряда LSB от его выходного сигнала.
Выходные сигналы восьми регистров 18-21 и 23-26 и выходной сигнал сумматора 33 временно записываются в регистры (не показаны) для выдачи в следующем этапе, т.е. блок 7 вычисляет среднее значение следующим образом,
Пусть Z1, Z2, Z3, Z4, Z6, Z7, Z8 и Z9 - выходы от регистров 18, 19, 20, 21, 23, 24, 25 и 26.
Пусть А, В, С и D - суммы двух данных, отобранных из выходов регистров, причем
A=Z1 + Z2, B=Z3 + Z4, C=Z6 + Z7, D=Z8 + Z9.
Далее пусть Е, F, G и H - остаточные значения после отбрасывания одного LSB разряда значений A, В, С, D. Тогда




 F =
F =  =
=  , G =
, G =  =
=  и
и
Пусть I и J - суммы значений Е и F, G и H соответственно,тогда
I = E + F =  и J = G + H =
и J = G + H =  . Дале пусть К и L - остаточные значения после отбрасывания одного LSB от I и J соответственно, тогда
. Дале пусть К и L - остаточные значения после отбрасывания одного LSB от I и J соответственно, тогда
K =  =
=  и L =
и L =  =
=  .
.
Наконец, предполагают, что значение, полученное путем сложения К и L и отбрасывания одного LSB разряда от полученного значения, является средним значением М, тогда
M =  =
=  .
.
Полученное среднее значение М не является точным. Но разница между точным средним значением и полученным средним значением не снижает качества полученного края, поскольку полученное среднее значение используется для трехрежимного кодирования в следующем этапе.
Шифратор 8 состояний (трехрежимный кодер) содержит сумматор 34 для суммирования среднего значения М и параметра ε, имеющего эффект уменьшения шума, и выдачи значения М+ε , сумматор 35 для суммирования среднего значения М и параметра -ε и выдачи значения М-ε , компараторы 36 для сравнения соответствующих данных точек Z1, Z2,...,Z9, за исключением центральных точечных данных Z5, со значение М+ε , компараторы 37 для сравнения соответствующих данных точек Z1, Z2, ...,Z9, за исключением центральных точечных данных (данных о центральной точке) Z5, со значением М-ε , инверторы 38 для выдачи сигналов самого старшего разряда MSB, V11, V21,..., V91 от компараторов 36, и элементы ИЛИ 39 для логического суммирования сигналов V10, V20,...,V90 самого младшего разряда LSB от трехрежимных сигналов с выходами от компараторов 37 соответственно, т.е. шифратор 8 выдает значение 11, если соответствующие точечные данные меньше, чем значение М-ε , и значение 01, если соответствующие точечные данные больше, чем значение М+ε , в противном случае выдается значение 00. Далее предполагают, что самый старший разряд MSB является знаковым, а самый младший разряд LSB - значимым, тогда значения 11, 00, 01 соответствуют трем режимам -1, 0, 1 соответственно.
Фиг.5-8 показывают четыре заранее определенных края W1, W2, W3 и W4.
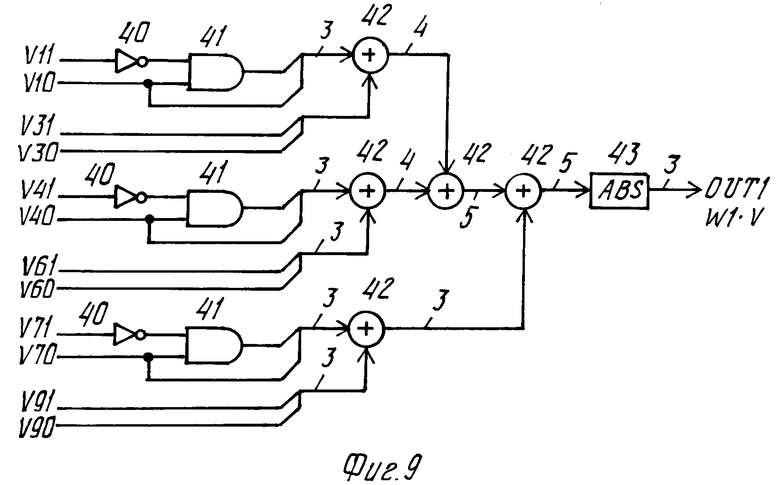
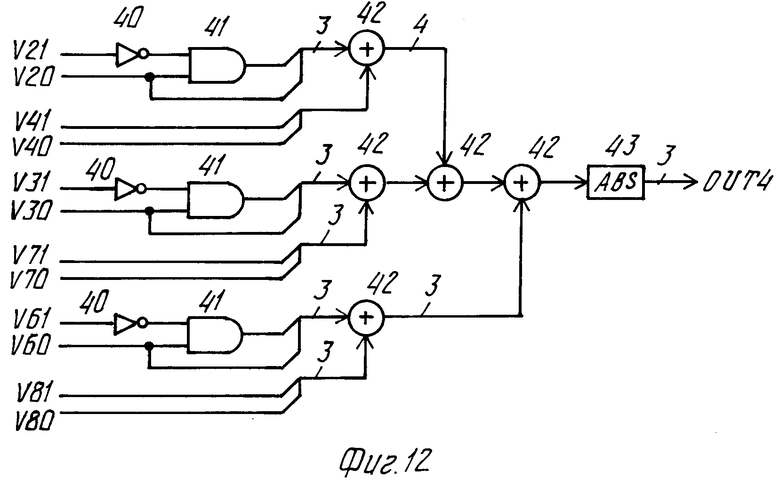
На фиг.9-12 показаны схемы перемножителей в средстве сопоставления изобретения.
Средство сопоставления выполняет скалярные произведения между парами дополнительных кодов элементов соответствующих четырех заранее определенных краев W1, W2, W3 и W4 и преобразованными значениями V11, V10, V21, V20,..., V91, V90.
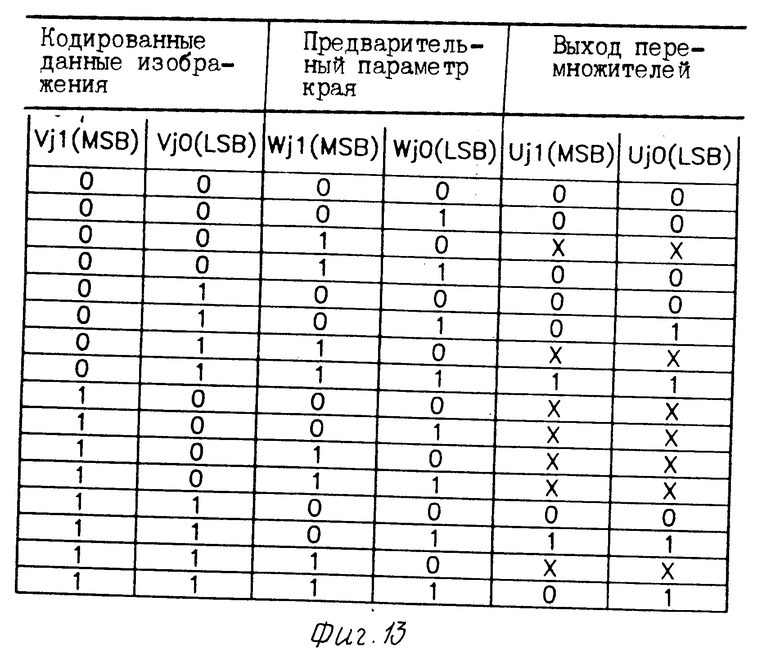
На фиг. 14 показана карта Карно для упрощения схемы скалярного произведения.
Упрощенные логические уравнения из фиг.8 следующие:
Uj1(MSb)= Vj0Wj1+V
Vj0Wj1+V Wj0;
Wj0;
Ujo(LSB) = VjoWjo.
Эти логические уравнения могут быть далее упрощены путем использования свойств четырех заранее определенных краев:
во-первых, в случае, когда Wj1 = Wjo = 1;
Uj1(MSB)= Vjo;
Vjo;
Ujo (LSB) = Vjo,
во-вторых, в случае когда Wj1 = Wjo = 0;
Uji (MSB) = Ujo(LSB) = 0,
т.е. результат скалярного произведения всегда равен нулю, независимо от данных изображения и поэтому не влияет на результирующий край,
в-третьих, в случае, когда Wj1 = 0; Wjo = 1;
Uj1(MSB) = Vj1;
Ujo(LSB) = Vjo.
В результате при выполнении технического обеспечения имеется четыре заранее определенных края, и только трехрежимные значения оказывают влияние на результат скалярного произведения. Кроме того, полученные результаты скалярного произведения представлены двумя битами и только шесть точек, исключая точки с весовым значением 0, из девяти точек применяются в выполнении технического обеспечения.
Показано следующее выполнение технического обеспечения, использующего вышеописанные логические равенства.
Первый перемножитель 9 W1˙V выдает ( V10)·V10,(V31)V30, (
V10)·V10,(V31)V30, ( V40)V40, V61V60,(
V40)V40, V61V60,( V70)V70, V91V90. Второй перемножитель 10 W2˙V выдает (
V70)V70, V91V90. Второй перемножитель 10 W2˙V выдает ( V10)·V10, V71V70,(
V10)·V10, V71V70,( V20)V20, V81V80,(
V20)V20, V81V80,( V30)V30, V91V90.
V30)V30, V91V90.
Третий перемножитель 11 W3˙V выдает ( V10)V10, V61V60, (
V10)V10, V61V60, ( V20)V20, V81V80, (
V20)V20, V81V80, ( V40)V40, V91V90.
V40)V40, V91V90.
Четвертый перемножитель 12 W4˙V выдает ( V20)V20, V41V40, (
V20)V20, V41V40, ( V30)V30, V71V70,(
V30)V30, V71V70,( V60)V60, V81V80.
V60)V60, V81V80.
Эти логические равенства выполняются путем использования инверторов 40 и элементов И 41, как показано на фиг.9-12. Далее выходы от элементов И 41 и выходы от инверторов 40 складываются в соответствующем перемножителе для получения скалярного произведения. Затем выполняется суммирование путем использования сумматоров 42 и путем суммирования в блоке 43 вычисления модуля. Суммирование в блоке 43 используется для получения того же самого результата края в случае, когда конечное значение суммирования имеет обратную величину, потому, что выходы от элементов И 41 представлены дополнительным кодом, Суммирование выходов элементов И 41 и выходов инверторов 40 также использует способ знакового расширения.
Блок 43 вычисления модуля для получения абсолютного значения представлен на фиг.15. Предполагают, что входными данными четырех битов являются А3А2А1А0, а выходными данными - В2В1В0. Блок 43 содержит элемент ИЛИ 44 для операции ИЛИ над входными данными А1 и А0, элемент И-НЕ 45 для получения "0", когда выход элемента ИЛИ 44 и входные данные А3 являются "1", элемент И-НЕ 46 для получения "0", когда входные данные А3 и А0 являются "1", и элемент ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ 47 для выдачи "1", когда входные данные А1 и выход элемента И-НЕ 46 являются противоположными значениями. Так, выходные значения элементов ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ 47, 48 и входные данные Ао становятся выходами В2, В1, В0 соответственно блока 43 вычисления модуля.
Блок принятия решения устройства выделения краев согласно изобретению содержит (фиг. 16) четыре компаратора 49 для ввода выходных сигналов OUT1, OUT2, OUT3 и OUT4 от блоков 43, представляющих край, и порогового значения "110", два элемента ИЛИ 50 для операции ИЛИ над парами, отобранными из выходных сигналов четырех компараторов 49 соответственно, и элемент ИЛИ 51 для операции ИЛИ над парой, отобранной из выходных сигналов двух элементов ИЛИ 50. Если по крайней мере один из отобранных сигналов от выходных сигналов OUT1, OUT2, OUT3 и OUT4 больше или равен шести, то выход элемента ИЛИ 51 равен "1" и определяется как край.
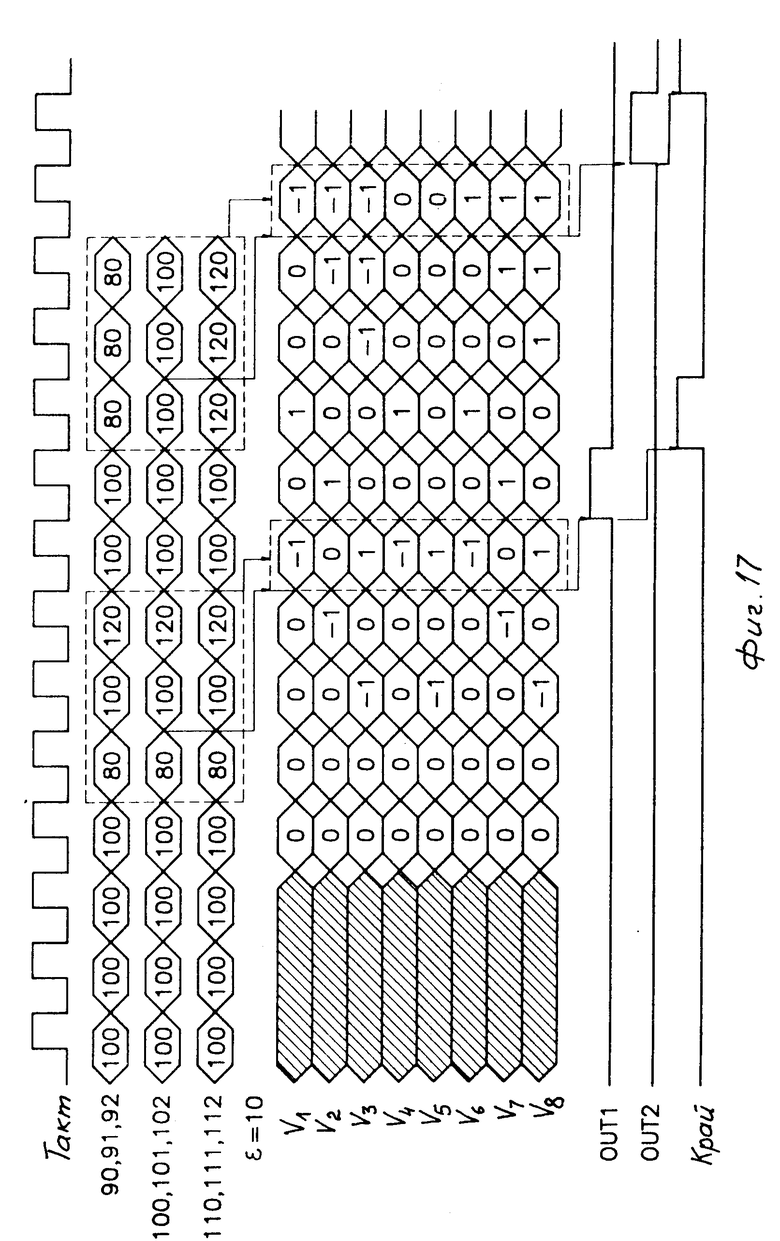
На фиг.17 показана временная диаграмма, показывающая работу устройства выделения краев согласно изобретению.
Допускают, что входные данные изображения, показанные на фиг.17, записываются в схеме окна 3 х 3 (регистры 18-26). Далееε устанавливается равным десяти. Трехрежимные значения V1, V2, V3, V4, V6, V7, V8, V9показаны на фиг. 17. Два входных образца, обведенных пунктирной линией, соответствуют заранее определенным образцам краев, т.е. первая пунктирная линия ограничивает площадь, равную W1, а вторая пунктирная линия ограничивает площадь, равную W2. Соответственно выходной сигнал EDGE (КРАЙ) принимает значение "1", когда по крайней мере один из выходных сигналов OUT1 и OUT2 равняется "1".
Устройство для выделения краев согласно изобретению имеет следующие преимущества. Во-первых, путем использования параметра для уменьшения шума в способе многорежимного кодирования можно существенно уменьшить шум без использования добавочных низкочастотных фильтров. Во-вторых, становится возможным существенно упростить техническое обеспечение и сократить время обработки путем использования локального окна 3 х 3, которое является наименьшим двумерным симметричным окном. В-третьих, путем использования нескольких линейных пороговых логических схем одновременно становится возможным использование свойств ротационной инвариантности многослойных линейных пороговых логических схем.







Изобретение относится к вычислительной технике. Его использование в системе обработки изображения позволяет снизить шум без использования добавочных низкочастотных фильтров, упростить выполнение устройства и сократить время обработки. Устройство содержит блок построчной задержки, блок оперативной памяти, блок вычисления среднего значения и блок принятия решения. Благодаря введению шифратора состояний и перемножителей в устройстве формируется окно размером 3 3 пиксела (элемента изображения), позволяющее обеспечить достижение вышеуказанных технических результатов. 7 з.п.ф-лы, 17 ил.
 ) соответственно объединены и являются i-м информационным входом блока, выходы (2i-1)-го и (2i)-го компараторов соответственно через i-й инвертор и непосредственно подключены к первому и второму входам i-го элемента ИЛИ, выходы i-х инвертора и элемента ИЛИ являются соответственно (2i-1)-м и (2i)-м выходами блока.
) соответственно объединены и являются i-м информационным входом блока, выходы (2i-1)-го и (2i)-го компараторов соответственно через i-й инвертор и непосредственно подключены к первому и второму входам i-го элемента ИЛИ, выходы i-х инвертора и элемента ИЛИ являются соответственно (2i-1)-м и (2i)-м выходами блока.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4833722, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

