(54) ЭЛЕКТРОПРИВОД ПОДЪЕМНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод | 1981 |
|
SU985911A1 |
| Вентильный электропривод | 1990 |
|
SU1767679A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод подъемной машины | 1981 |
|
SU996317A2 |
| Способ регулирования скорости тягового электродвигателя | 1979 |
|
SU783071A1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |

1
Изобретение относится к автоматизированному электроприводу постоянного тока, а точнее к электроприводу с автоматизированными системами управления, воздействующими на двигатель подъемника со шкивом трения и плоским резинотросовым канатом.
Известен электропривод рудничного подъема, содержащий нереверсивный вентильный преобразователь (НВП), питающий якорную цепь двигателя, и реверсивный вентильный преобразователь (РВП), подключенный к обмотке возбуждения двигателя. В канале управления НВП включены блок регулирования тока.(БРТ), вход которого соединен с выходом блока регулирования производной тока (БРПТ), вход последнего соединен с выходом блока регулирования скорости (БРС) через коммутатор (К), который соединяет выход БРС с входом БРПТ непосредственно или через инвертор. Коммутатор управляется в функции тока возбуждения двигателя. В канале управления РВП включен блок регулирования возбуждения (БРВ), вход которого соединен с выходом БРС через согласующий усилитель (УС). Величина коэффициента усиления УС устанавливается в соответствии со статической характеристикой, согласно которой в статическом режиме при наличии сигнала задания на номинальный ток возбуждения поддерживается половина номинального якорного тока двигателя 1.
Однако в переходных режимах статическая характеристика устройством не выполняется, так как выходной сиснал БРС в начальный период разгона, а также в моменты выхода на установившуюся скорость
.- и начала торможения изменяется с большой скоростью. Задание на якорный ток двигателя поступает через БРПТ, который «растягивает во времени изменения выходного сигнала БРС. Пока якорный ток плавно изменяется в соответствии с настроечной характеристикой БРПТ, ток возбуждения двигателя изменяется в соответствии с выходным напряжением БРС.
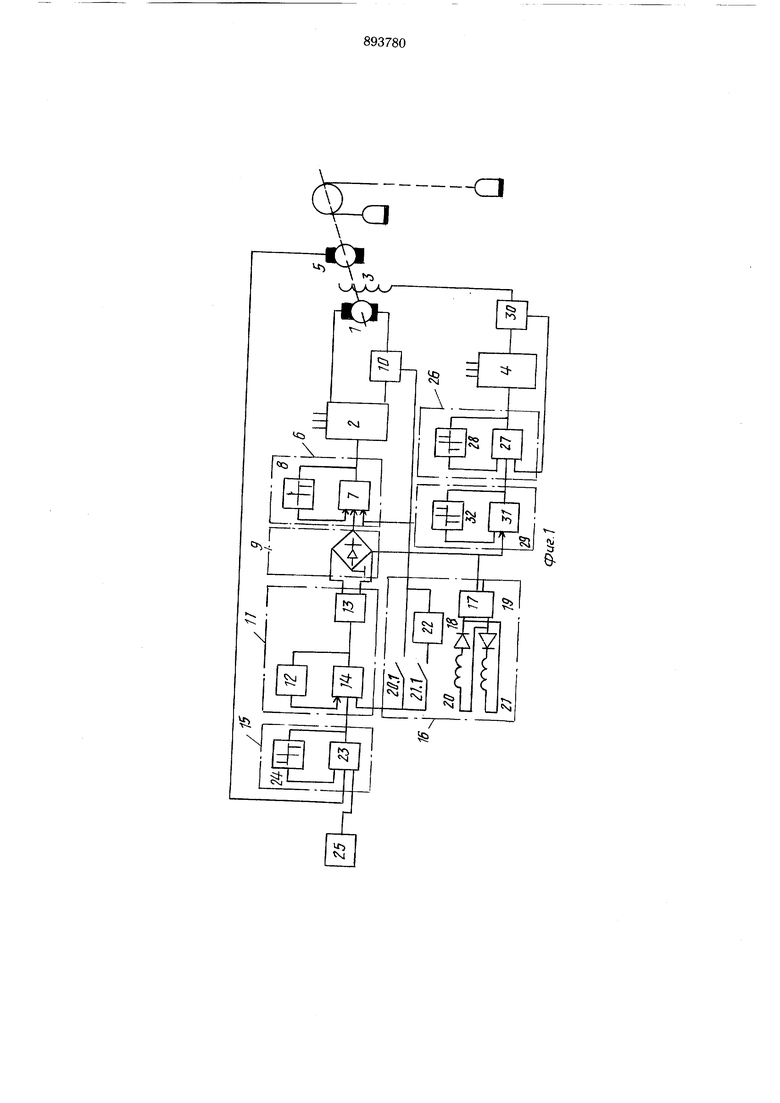
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является электропривод подъемной машины, содержащий двигатель постоянного тока с независимым возбуждением, якорь которого подключен к нереверсивному вентильному преобразователю, в канал управления которого последовательно включен блок регулирования тока, вход обратной связи которого подключен к датчику тока, а обмотка возбуждения двигателя соединена с реверсивным вентильным преобразователем, управляющий вход которого подключен к выходу блока регулирования тока возбуждения, вход обратной связи которого соединен с датчиком тока возбуждения, коммутатор и блок регулирования скорости, вход обратной связи которого соединен с датчиком скорости, а другой вход соединен с блоком задания скорости 2. Недостаток электропривода заключается в том, что для обеспечения работоспособноети схемы регулирования в нее введен диодный дешифратор,входы которого подключены к датчику направления движения через логические элементы ИЛИ-НЕ, к датчику тока якоря, датчику величины тока возбуждения, через логические элементы ИЛИ-НЕ к датчику скорости, выходу регулятора скорости и к датчику тока возбуждения. Выходы диодного дешифратора соединены с входом коммутатора, а также с входами регулятора тока якоря и регулятором тока возбуждения. Таким образом в схему системы регулирования с жестким управлением введен дешифратор с шестью входными цепями и тремя выходными, что приводит к понижению точности и надежности электропривода и усложняет процесс регулирования, что в высокопроизводительных подъемных установках производительностью до 20 млн. т в год недопустимо. Кроме того, в динамических режимах ток якоря и ток возбуждения двигателя обнуляются не одновременно, так как для оптимального протекания процесса реверса возбуждения требуется значительная по величине форсировка возбуждения, а практически устанавливается 3-4-х кратная. Поэтому якорный ток двигателя изменяется значительно быстрее в. переходных режимах, чем ток возбуждения двигателя. При смене задания момента и тока возбуждения двигателя, т. е. смене полярности выходного напряжения регулятора скорости, ток возбуждения начинает реверсироваться со скоростью, определяемой запасом по напряжению РВП, а знак задания тока якоря становится отрицательным на время, пока ток возбуждения сменит знак. Отрицательное задание якорного тока обеспечивает быстрое обнуление якорного тока и запирания НВП. В это время скорость двигателя изменяется только под действием статического момента, т. е. приводная система не управляема. Это приводит к рассогласованию между заданным и действительным значениями скорости, что после окончания бестоковой паузы приводит к толчкам тока якоря и появлению колебаний в электромеханической системе. Цель изобретения - повышение надежности электропривода и улучшение динамических показателей. Поставленная цель достигается тем, что в электропривод введены блок регулирования производной тока, блок выделения модуля и согласуюший усилитель, причем выход блока регулирования скорости соединен с задающим входом блока регулирования производной тока, выход которого подключен к блоку регулирования тока через блок выделения модуля и к блоку регулирования тока возбуждения через согласующий усилитель, а вход обратной связи блока регулирования производной тока соединен с датчиком тока через коммутатор, управляющий вход которого подсоединен к выходу блока регулирования производной тока. В предлагаемом устройстве статическая характеристика, согласно которой номинальному заданию на ток возбуждения соответствует половина номинального якорного тока, выдерживается не только в статических, но и в переходных режимах - в начальные моменты пуска, торможения и реверса момента привода. Это достигается тем, что задание с выхода блока регулирования скорости «растягивается во времени блоком регулирования производной тока, выходной сигнал которого поступает одновременно на контуры регулирования тока возбуждения и якорного тока двигателя. На фиг. 1 изображена функциональная схема возможного варианта выполнения устройства; на фиг. 2 - статическая характеристика зависимости токов возбуждения и якоря двигателя в функции выходного напряжения регулятора производной тока, на фиг. 3 - кривые измения скорости двигателя подъема якорного тока и потока возбуждения. Якорь 1 двигателя постоянного тока включен на нереверсивный вентильный преобразователь 2, обмотка 3 возбуждения электродвигателя питается от реверсивного вентильного преобразователя 4. С валом двигателя соединен механически вал тахогенератора 5. Блок 6 регулирования тока (БРТ) состоит из регулятора 7 тока и ограничивающего узла 8. На вход регулятора 7 тока поступает три сигнала: задающий от блока 9 выделения модуля и от ограничивающего узла 8, задающего максимальную величину выпрямленного напряжения на выходе преобразователя 2, и обратной связи по току якоря от датчика 10 тока. Блок 9 выделения модуля (БВМ) представляет собой диодный мост, который выпрямляет сигнал, поступающий от блока 11 регулирования производной тока (БРПТ) к БРТ. Блок 11 регулирования производной тока состоит из ограничивающего узла 12 и двух усилителей: интегрирующего 13 и пропорционального 14. На вход усилителя 14 поступает три сигнала: задающий от блока 15 регулирования скорости, от ограничивающего узла 12, определяющего скорость изменения тока якоря, и обратной связи по току якоря, причем знак последней формируется коммутатором 16. Коммутатор состоит из усилителя 17 мощ ности, вход которого подключен к выходу БРТ, а к его выходу через раздели гельные диоды 18 и 19 подключены реле 20 я 21, имеющие контакты 20.1 и 21.1, соответственно. Коммутатор в зависимости от полярности выходного сигнала БРПТ соединяет выход обратной связи по току якоря со входом БРПТ непосредственно через контакт 20.1 реле 20 или через инвертор 22 и контакт 21.1 реле 21. Блок 15 регулирования скорости состоит из регулятора скорости 23 и ограничивающего узла 24, который контролирует максималь ное значение задания тока. На вход БРС поступает три сигнала: задающий от блока 25 задания скорости, обратной связи от тахогенератора 5, ограничивающего узла 24. Вход реверсивного- вентильного преобразователя 4 подключен к выходу блока 26 регулирования возбуждения. Блок 26 регулирования возбуждения (БРВ) состоит из регулятора 27 возбуждения и ограничивающего узла 28. На вход регулятора 27 поступает три сигнала: задание от блока 29 согласующего усилителя, ограничивающего узла 28, обратной связи по току возбуждения от датчика 30 тока возбуждения. Задающий вход пропорционального усилителя 31 электрически связан с выходом интегрирующего усилителя 13 блока И регулирования производной тока, кроме того на задающий вход поступает сигнал от ограничивающего узла 32, задающего номинальное значение тока возбуждения. Устройство работает следующим образом. При отсутствии сигнала на выходе блока 25 задания скорости якорная цепь и обмотка возбуждения двигателя обесточены. Задающие сигналы на блоки регулирования якорного тока и тока возбуждения появляются при наличии напряжения на выходе блока 25 задания скорости, поступают от блока регулирования скорости 15 и растягиваются во времени БРПТ 11, причем на первый блок сигнал поступает через блок 9 выделения модуля, а на второй блок через согласующий усилитель 29. С появлением сигнала на выходе БРПТ 11 коммутатором 16 устанавливается обратная отрицательная связь по току двигателя на усилитель 14. Темп изменения задающего сигнала на ток якоря, а также задание на ток возбуждения двигателя определяются выходным сигналом БРПТ 11 и блок 29, причем БРПТ 11 настраивается с учетом ограничений по коэффициенту форсировки реверсивного вентильного преобразователя 4. При таком включении регуляторов статическая характеристика (фиг. 2) сохраняется в динамических режимах (33 и 34 - якорный ток и ток возбуждения двигателя в функции выходного напряжения Upnr регулятора производной тока (на фиг. 3 кривая 35 - тахограмма подъема), что выгодно отличает предлагаемый электропривод постоянного тока подъемных мащин с постоянными радиусами навивки от известного устройства, так как увеличивается плавность отработки заданной тахограммы движения путем предотвращения толчков тока якоря в момент реверса потока возбуждения и колебаний подъемных сосудов. Использование предлагаемого электропривода за счет улучшения динамики системы приводит к повышению долговечности тяговых органов и футеровки органа навивки. Формула изобретения Электропривод подъемной мащины, содержащий двигатель постоянного тока с независимым возбуждением, якорь которого подключен к нереверсивному вентильному преобразователю, в канал управления которого включен блок регулирования тока, вход обратной связи которого подключен к датчику тока, а обмотка возбуждения двигателя соединена с реверсивным вентильным преобразователем, управляющий вход которого подключен к выходу блока регулирования тока возбуждения, вход обратной связи которого соединен с датчиком тока возбуждения, коммутатор и блок регулирования скорости, вход обратной связи которого соединен с датчиком скорости, а другой вход соединен с блоком задания скорости, отличающийся тем, что, с целью повышения надежности и улучшения динамических показателей, в него введены блок регулирования производной тока, блок выделения модуля и согласующий усилитель, причем выход блока регулирования скорости соединен с задающим входом блока регулирования производной тока, выход которого подключен к блоку регулирования тока через блок выделения модуля и к блоку регулирования тока возбуждения через согласующий усилитель, а вход обратной связи блока регулирования производной тока соединен с датчиком тока через коммутатор, управляющий вход которого подсоединен к выходу блока регулирования производной тока. Источники информации, принятые во внимание при экспертизе 1.Динкель А. Д. и др. Тиристорный электропривод рудничного подъема. М., «Недра, 1977, с. 129. 2.Авторское свидетельство СССР № 650192, кл. Н 02 Р 5/06, 1973 (прототип) .
СИ
1,0 -0,5
отн. ед.
31 33
Црпт
Of 5 1,0 отн.ед.
-0,5
-f,(7
Фцг.г
53
.
-/,0-f,0
fu2. 3
