11280690
Изобретение относится к электроехнике, в частности к электропривораве пи пр 5 си ни ля си ни
ду, и может быть использовано в металлургической и других отраслях пр мьпопеиности, например, для привода агрегатов прокатного производства, мостовых и портальных кранов и т,п.
Цель изобретения - повышение КПД, коэффициента мощности и надежности.
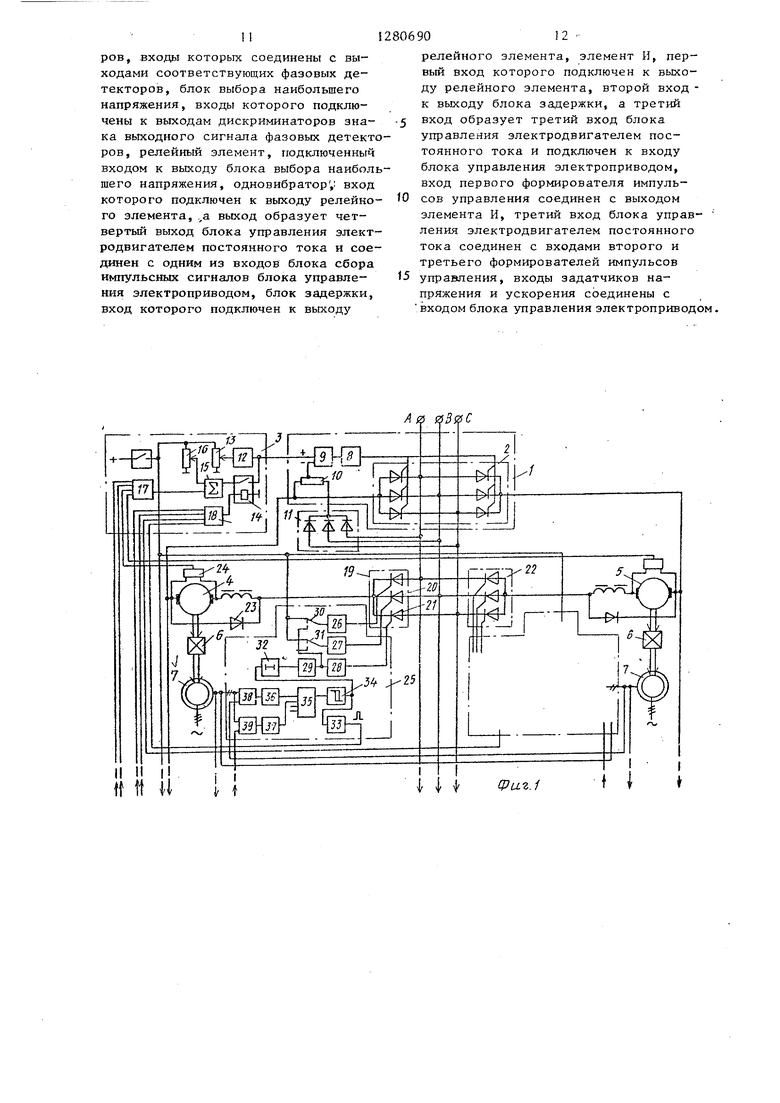
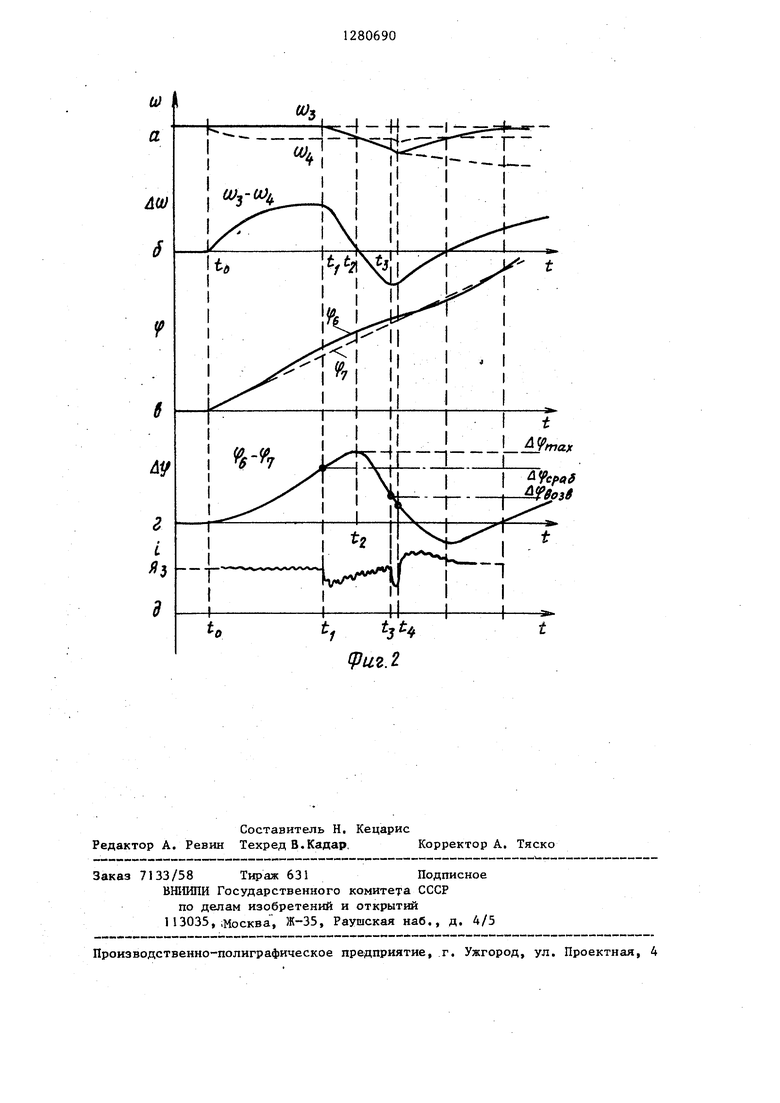
На фиг. 1 изображена схема многодвигательного электропривода; на фиг. 2 - временные диаграммы, иллюстрирующие переходные процессы синхронизации электродвигателей.
Многодвигательный электропривод содержит управляемый групповой нереверсивный источник 1 питания, включающий в .себя блок 2 силовых управляемых вентилей, блок 3 управления электроприводом, четное число электродвигателей 4 и,5 постоянного тока, механически саязанньгх через редукторы 6 с соответствующими приводными валами технологического агр гата и с датчиками углового положения валов, выполненными в виде фа- зойращателей 7, при этом все электрдвигатели постоянного тока разделены на две группы с примерно равной суммарной мощностью, в одной из которых всё якори электродвигателей 4 одним иэ зажимов непосредственно присоединены к отрицательному силовому выводу управляемого группового нереверсивного источника 1 питания, а в другой - к его положительному силовому выводу.
Групповой нереверсивный источник 1 питания представляет собой трехфазный мостовой полиостью управляемый выпрямитель и содержит систему 8 импульсно-фазового управления (СИФУ)5 регулятор 9 напряжения, выход которого соединен со входом СИФУ 8. Первый вход регулятора 9 напряжения подключен к управляющему выходу делителя 10 напряжения обратной связи, который подключен к общей точке анодов блока 2 силовых управляемых вентилей и к общей точке катодов неуправляемых вентилей трехфазного полумоста Г, подключенного к той.же питающей сети переменного тока, к которой подключен управляемый нереверсивный групповой источник 1 питания. Второй вход регулятора 9 напряжения является уп
равляющим входом управляемого нереверсивного группового источника 1 питания. Блок 3 управления электроприводом содержит задатчик 12 интен- 5 сивности роста управляющего напряжения, выход которого соединен с управляющим входом управляемого нереверсивного группового источника 1 питания, а вход присоединен к выходу датчика 13 напряжения. К выходу за- датчика 12 интенсивности роста управляющего напряжения подключен через ключ 14 сброса напряжения выход сумматора 15, один из двух входов кото-
рого присоединен к задатчику 16 ускорения при восстановлении скорости вращения в процессе синхронизации по углу. Входы обоих задат.чиков 12 и 13 объединены и образуют вход блока
3 управления электроприводом. Второй вход сумматора 15 соединен с выходом блока 17 выбора наименьшего напряжения из всех однополярных напряжений, поданных н-а его входы, а управ- ляющий вход ключа 14 сброса подсоединен к выходу блока 18 сбора импульсных сигналов, поданных на его входы.
30 Комплект аппаратуры как силовых цепей, так и цепей управления, относящийся к одному электродвигателю постоянного тока электропривода, идентичен для каждого электродвига, теля, каждый такой комплект содержит в силовой цепи первый управляемый вентиль 19 и два дополнительных управляемых вентиля 20 и 21, образующих трехфазный выпрямитель40 ный полумост 22, вход переменного тока которого подключен к шинам питающей сети переменного тока. Трехфазные выпрямительные полумосты образуют для каждой пары электродви гателей схему правляемого трехфазного мостового выпрямителя. Неуправляемые обратные вентили 23 шунтируют якоря электродвигателей 4 ,и 5,
50
Фазовращатель 7 выполнен в виде сельсина, подключенного трехфазной обмоткой к трехфазной питающей сети переменного тока. Датчик 24 напряже- 55 подключен своими входами к якорю электродвигателя постоянного тока, а выходом - к одному из входов блока 17 выбора наименьшего напряжения.
31280690
Все блоки 25 управления электродвигателями постоянного тока идентичны по своему аппаратному составу. Каждый из этих блоков содержит
три формирователя 26 - 28 импульсов,5 относительный сдвиг по фазе напря- обеспечивающих ключевое управление жений на их выходах равен нулю, вентилями полумостов 22, причем вход при этом напряжения на выходе фазо- формирователя 28 непосредственно вого детектора 38, на выходе блока
присоединен к выходу элемента И 29,
дискриминатора 36 знака, блока 35
а входы формирователей 26 и 27 под- О выбора наибольшего напряжения и на
ключены через переключатели 30 и 31 к входу элемента И 29, а при переключении переключателей 30 и 31 - к выходу элемента: И 29. Второй вход элемента И 29 присоединен к вы- ходу блока 32 задержки, а вход блока 32 задержки вместе с третьим входом блока элемента И 29 и входом одновибратора 33 присоединен к выходу релейного элемента 34. Вход релей-20 электродвигателями постоянного тока, ного элемента 34 присоединен к выхо- Начиная с этого . момента времени
ду блока 35 выбора наибольшего напряжения с числом входов, равным числу синхронизирующих связей данного электродвигателя с другими, а входы блока 35 выбора наибольшего на- пряжения через дискриминаторы.36 и
37знака выходного сигнала фазовых
детекторов присоединены к выходам соответствующих фазовых детекторов
38и 39 также по числу синхронизирующих связей. Первые входы фазовых детекторов 38 и 39 присоединены к выходу соответствуюп1его фазовращанапряжение на управляющем входе управляемого группового нереверсивного источника 1 питания, а следовательно, и на первом входе регулятора 9 напряжения начинает плавно возрастать, СИФУ 8 формирует импульсы управления, отпирающие вентили управляемого группового нереверсивного 30 источника 1 питания, на выходе трехфазного полумоста 11 неуправляемых
вентилей, на делителе 10 напряжения обратной связи и в силовой цепи электропривода также начинает плавно теля 7, а вторые входы фазовых детек- возрастать напряжение, на выходах эле- торов 38 и 39 присоединены к выхо- ментов И 29 формируются логические сиг- дам фазовращателей остальных электро- налы 1,поступающие на вход формиро- двигателей, которые образуют с дан- вателей 28, на входы формирователей
26 и 27 поступают логические сигна- 40 лы 1 со входа блока 3 управ ления электроприводом через переключатели 30 и 31, все формирователи вступают в работу и все вентили полумостов 22 открываются, возрастающее тоянного тока связаны синхронизирую- 45 напряжение силовой цепи прикладывает- щими по углу связями попарно, т.е. ся к якорям всех электродвигателей,
электродвигатели плавно (в соответствии с темпом роста напряжения на выходе задатчика 12 интенсивности 50 -роста управляющего напряжения) уве- личивают скорость вращения и через некоторое время достигают заданной установившейся скорости вращения.
ным электродвигателем синхронизированную по углу группу.
Многодвигательный электропривод работает следующим образом.
Примем (для простоты описания работы), что электродвигатели пос-
электродвигатель 4 с электродвигателем 5, а переключатели 30 и 3 переведены в верхнее (по схеме на фиг.1) положение.
В.исходном положении сигнал на входе блока 3 управления электроприводом отсутствует, напряжение на управляющем входе управляемого группового нереверсивного источника 1 питания и на его силовых выходах равны нулю, сигналы на выходах всех элементов И 29 равны нулю, все вентили полумостов 22 закрыты, элект55 Если установившиеся скорости вращения обоих электродвигателей 4 и 5 синхронной пары одинаковы, то связанные с ними через редукторы 6 роторы фазовращателей 7 в процессе вр ародвигатели неподвижны, при согласованном положении роторов фазовращателей 7 и поданном на их трехфазные обмотки напряжении возбуждения,
дискриминатора 36 знака, блока 35
выходе одновибратора 33 равны нулю, а на выходе релейного элемента 34 и на втором и третьем входах элемента И 29 равны логической 1. При подаче сигнала на вход блока 3 управления электроприводом подается напряжение на задатчик 13 напряжения, на задатчик 16 ускорения и на входы всех блоков 25 управления
напряжение на управляющем входе управляемого группового нереверсивного источника 1 питания, а следовательно, и на первом входе регулятора 9 напряжения начинает плавно возрастать, СИФУ 8 формирует импульсы управления, отпирающие вентили управляемого группового нереверсивного источника 1 питания, на выходе трехфазного полумоста 11 неуправляемых
55 Если установившиеся скорости вращения обоих электродвигателей 4 и 5 синхронной пары одинаковы, то связанные с ними через редукторы 6 роторы фазовращателей 7 в процессе
щения остаются в согласованном по углу положении.
Приложенное к якорям электродвигателей 4 и 5 напряжение через дат- чик 24 напряжения поступает на входы блока 17 выбора наименьшего напряжения, в котором наименьшее напряжение вьщеляется и поступает на второй вход сумматора 15, Сумма этого напряжения и напряжения с задатчика 16 ускорения поступает на вход ключа 14 сброса напряжения, но не проходит на его выход. В описанном режиме электропривод работает до того момента времени, когда рассогласо вание по углу, возникшее между роторами фазовращателей двух электродвигателей, составляющих синхронную пару, достигнет значения, близкого к прецедьно допустимому.
Пусть .в процессе работы пары электродвигателей 4 и 5 в полнофаз- ном режиме питания .(т.е. при всех открытых вентилях полумостов 22) в момент времени t (фиг. 2) момент сопротивления на валу электродвигателя 5 увеличился, в результате чего его скорость вращения уменьшилась (фиг. 2 а) относительно скорости электродвигателя 4. Появившаяся разница в скоростях вращения электродвигателей (фиг. 2 б) вызовет отставание ротора фазовращателя 7 электродвигателя 5 относительно ротора фазовращателя электродвигателя 4 (фиг. 2 ,в и 2 г),в свою очередь, появившаяся разница углов вызовет появление на выходах фазовых детекторов 38 одинаковых по величине, но противоположных по знаку, напряжений. При этом благодаря соответствующему согласованию фаз напряжений фазовращателей пары электродвигателей на входах фазовых детекторов, на выходе фазового детектора 38 блока 25 управления электродвигателем 4 напряжение будет положительным и будет передано дискриминатором 36 на вход релейного элемента 34, в то же время в блоке управления электродвигателем 5 такой же по величине, но отрицательный выходной сигнал фазового детектора будет заблокирован дискриминатором знака и на работу последующих блоков тракта передачи сигнала управления влияния не окажет. Когда в момент времени
t. разница углов фазовращателей
0
5
5
0
5
0
увеличится до установки срабатывания релейного элемента 34, логический сигнал 1 на его выходе изменяется на логический О, сигнал на выходе элемента И 29 .и входе формирователя 28 импульсов также становится равным логическому нулю, импульсы управления на выходе формирователя 28 импульсов исчезают и тиристор соответствующей фазы полумоста 22 источника питания для пары электродвигателей в следующий период напряжения питающей сети переменного тока не открывается.
Таким образом в момент t, якорь электродвигателя 4 переводится в режим питания по двум фазам полумоста 22 источника питания для пары электродвигателей, но ток в якоре электродвигателя 4 остается непрерывным. Развиваемый электродвигателем 4 вращающий момент уменьшается и его скорость вращения начинает уменьшаться (фиг. 2 а), разница скоростей пары электродвигателей 4 и 5 начинает также уменьшаться (фиг. 2 б) и через некоторое время, начиная с момента времени t (см. фиг. 2 г), начинает уменьшаться и возникшее ранее угловое рассогласование роторов фазовращателей. В момент времени t угловое рассогласование уменьшается до уставки возврата А ЙОЗВР релейного элемента 34, в этот момент на его выходе опять появляется сигнал логической 1, который, попадая на вход блока 32 задержки, запускает процесс отсчета выдержки времени, а, попадая на вход
5
одновибратора 33, вызывает появление на его выходе короткого импульса напряжения. Пройдя через блок 18 сбора импульсных сигналов, этот импульс вызывает срабатывание ключа 14 сброса напряжения и, практически мгновенно, спадение напряжения на выходе задатчика 12 интенсивности роста управляющего напряжения до
выходного напряжения сумматора 15, которое равно сумме напряжения на
якоре электродвигателя 4 и напряжения, снимаемого с задатчика 16 ускорения . По окончании импульса одно- вибратора 33 ключ 14 сброса напря- жения возвращается в исходное разомкнутое состояние, после чего возобновляется рост напряжения на выходе задатчика 12 интенсивности роста ущ)авляющего напряжения до преж0
него заданного значения, сразу же после окончания импульса одновибра- тора- 33 заканчивается формирование выдержки времени в блоке 32 задержки (момент t на фиг. 2), в этот момент на
-4 его
выходе, и на выходе
элемента И 29 появляются логические сигналы 1, на выходе формирователя 28 импульсов появляются импульсы управления, тиристор соответствующей фазы полумостов 22 вновь открывается и электродвигатель 4 возвращается к полнофазному режиму питания, В этот момент (фиг. 2 д) через якорь электродвигателя 4 протекает небольшой всплеск тока (амплитуда которого может регулироваться задатчиком 16 ускорения), плавно разгоняющий электродвигатель 4 до прежнего значения скорости вращения, в других электродвигателях всплеск тока будет заведомо меньше, так как во время восстановления, напряжения на якорях их скорость и противо-ЭДС оказываются несколько большими. После восстановления полнофазного режима питания скорость электродвигателя 4 восстанавливается (фиг. 2 а), а рассогласование по углу уменьшается и может (в зависимости от настройки релейного элемента 34) изменить знак (фиг. 2 г). Если после восстановления углового рассогласования (при ,.} повышенная нагрузка на валу электродвигателя 5 сохраняется, описанный процесс синхронизации будет .повторяться. Таким образом, внешним проявлением увеличения нагрузки на одном из двух синхронизированных электродвигателей являются кратковременное однократное или повторяющееся (в зависимости от длительности существования разницы в оментах сопротивления и ее величины) частичное отключение менее нагруженного двигателя. Это явление может быть использовано для сигнализации о возникновении разницы в нагрузках на валах определенных электодвигателей.
В том случае, если например ,фазовраатель 7 связан синхронизирующими вязями одновременно с двумя фазо- арщателями двух других электродвигателей на вход релейного элемента 34 через блок 35 выбора наибольшего сигнала проходит сигнал рассогласования (опережения) фазовращателя 7
0
5
0
данного электродвигателя 4 по отношению к одному из двух других фазовращателей, а именно - по отношению к фазовращателю наиболее отстающего электродвигателя, сформированный фазовым детектором 38 и дискриминатором 36 знака или фазовым детектором 39 и дискриминатором 37 знака. После автоматического подтормажива- ния электродвигателя 4 наиболее опережающим может оказаться другой электродвигатель, например 5. В этом случае аналогичный процесс подтормаживания возникает в электро- двига,теле 5 и т.д. Таким образом, оказывается, что в системе из нескольких электродвигателей, связанных между собой синхронизирующими по углу связями, в общем процессе согласованного вращения ведущим является один из электродвиг.ателей, скорость вращения которого является в данный момент наименьшей;
5 В тех случаях, когда разница в нагрузках на валах синхронизированных электродвигателей может существенно превьппать 1 /3 среднего для всей группы электродвигателей значе0 НИН (например, за счет подгрузки одного и одновременной разгрузки какого-либо другого электродвигателя) может оказаться целесообразным повысить эффективность процесса согласования использованием режима работы с двумя отключенными фазами, если же при этом электропривод характеризуется еще и большим приведенным моментом инерции и относительно малым статическим моментом сопротивления (как например, у мостовых и пор т льньЕх кранов),то может оказаться целесообразным переход на режим синхронизации со всеми тремя
5 отключаемыми фазами.
Формула изобретения
5
0
50
55
Многодвигательный электропривод, содержащий п электродвигателей постоянного тока, где п - четное число, управляемый нереверсивный групповой источник питания, подключенный к шинам питающей сети переменного тока, включающий в себя блок силовых управляемых вентилей, управляющие электроды которых соединены с выходами системы импульсно-фазового управления, подключенной своим входом к выходу
91280690
регулятора напряжения, первый вход которого подключен к управляющему выводу делителя напряжения обратной связи, а второй вход, являющийся управляющим входом управляемого нереверсивного группового источника питания - к выходу блока управления электроприводом, включающему задат- чик интенсивности роста управляющего напряжения, ключ сброса напряжения, сумматор и блок выбора наименьшего напряжения с числом входов, равным числу электродвигателей, при этом вход задатчика интенсивности роста управляющего напряжения соединен с выходом задатчика напряжения, а выход задатчика интенсивности роста управляющего напряжения образует выход блока управления электроприво10
пового нереверсивного источника питания - к шине постоянного тока управляемого нереверсивного группового источника питания, дополнительные управляемые вентили, подключенные ко второму зажиму якорей электродвигателей постоянного тока, образующие с первым управляемым вентилем трехШ
фазный выпрямительный полумост, вход переменного тока которого подключен к шинам питающей сети переменного тока, управляющие электроды дополнительных управляемых венти- . лей соединены соотвественно со вто- 15 рым и третьим выходами блока управления электродвигателем, блок выбора наименьшего напряжения снабжен числом входов, равным числу электродвигателей, трехфазные выпрямитель- дом, ключ сброса напряжения подключен 20 ньш полумосты образуют для каждой к выходу задатчика интенсивности рос- пары электродвигателей схему полта управляющего напряжения, а силовым входом - к выходу сумматора, первый вход которого соединен с выходом задатчика ускорения, а второй вход - с выходом блока выбора наименьшего напряжения, неуправляемые обратные вентили,шунтирующие электродвигатели постоянного тока,подключенные первым зажимом якоря к одной из выходных шин постоянного тока управляемого нереверсивного группового источника питания, а вторым зажимом - к силовому злектроду первого управляемого вентиля, при этом вал каждого электродвигателя соединен через редуктор с датчиком углового положения, датчики напряжения по числу электродвигателей постоянного тока, подключенные своими входами к зажимам якоря каждого электродвигателя постоянного тока, а выходами - ко входам блока выбора наименьшего напряжения и блок управления электродвигателями постоянного тока, первый выход которого соединен с управляющим электродом первого управляемого вентиля, а первый вход - с выходом датчика углового положения электродвигателя постоянного тока, отличающийся тем, что, с целью повышения КПД, коэффициента мощности и надежности, в него дополнительно введены трехфазный полумост
неуправляемых вентилей, вход перемен- 55 ДИнены с выходами фазовращателей ного тока которого подключен к шинам соответствующих электродвигателей питающей сети переменного тока, а выход постоянного тока через целитель напряжения обратной связи группостоянного тока, дискриминаторы знака выходного сигнала фазовых д текторов по числу фазовых детекто
10
пового нереверсивного источника питания - к шине постоянного тока управляемого нереверсивного группового источника питания, дополнительные управляемые вентили, подключенные ко второму зажиму якорей электродвигателей постоянного тока, образующие с первым управляемым вентилем трехфазный выпрямительный полумост, вход переменного тока которого подключен к шинам питающей сети переменного тока, управляющие электроды дополнительных управляемых венти- лей соединены соотвественно со вто- рым и третьим выходами блока управления электродвигателем, блок выбора наименьшего напряжения снабжен числом входов, равным числу электродвигателей, трехфазные выпрямитель- ньш полумосты образуют для каждой пары электродвигателей схему полностью управляемого трехфазного мостового выпрямителя, электродвигатели постоянного тока попарно подсое25 динены к выводам противоположной полярности полумостов, блоки управления электродвигателем постоянного тока выполнены по числу электродвигателей постоянного тока, датчики
30 углового положения выполнены в виде фазовращателей, трехфазные обмотки которых подключены к шинам питающей сети переменного тока, выход фазовращателя каждого электродвигателя
постоянного тока подключен к первому входу блока управления данным электродвигателем постоянного тока и ко вторым входам блоков управления остальными (п-1) электродвига40 телями постоянного тока, каждый блок управления электродвигателем постоянного тока содержит первый, второй и третий формирователи импульсов управления, выходы которых обра45 зуют первый, второй и третий выходы блока управления электродвигателем постоянного тока, (п-1) фазовых детекторов, первые входы которых: объединены и образуют первый
50 вход блока управления электродвигателем постоянного тока, вторые входы фазовых детекторов образуют группу вторых входов блока управления электродвигателем постоянного тока и соеДИнены с выходами фазовращателей соответствующих электродвигателей
постоянного тока, дискриминаторы знака выходного сигнала фазовых детекторов по числу фазовых детекторов, входы которых соединены с выходами соответствующих фазовых детекторов, блок выбора наибольшего напряжения, входы которого подключены к выходам дискриминаторов зна- ка выходного сигнала фазовьос детекторов, релейный элемент, подключенный входом к выходу блока выбора наибольшего напряжения, одно вибратор ,; вход которого подключен к выходу релейного элемента, .а вькод образует четвертый выход блока управления электродвигателем постоянного тока и соединен с одним из входов блока сбора импульсных сигналов блока управления электроприводом, блок задержки, вход которого подключен к выходу
-5 8069012
релейного элемента, элемент И, первый вход которого подключен к выходу релейного элемента, второй вход - к вькоду блока задержки, а третий вход образует третий вход блока управления электродвигателем постоянного тока и подключен к входу блока управления электроприводом, вход первого формирователя импульсов управления соединен с выходом элемента И, третий вход блока управ- Ленин электродвигателем постоянного тока соединен с входами второго и третьего формирователей импульсов 5 управления, входы задатчиков напряжения и ускорения соединены с входом блока управления электроприводом.
fO
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления многодвигательным электроприводом постоянного тока | 1983 |
|
SU1164854A1 |
| Многодвигательный электропривод | 1979 |
|
SU851720A1 |
| Электропривод постоянного тока | 1980 |
|
SU924814A1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЯМИ | 1972 |
|
SU341898A1 |
| Способ управления вентильнымМНОгОдВигАТЕльНыМ элЕКТРОпРиВО-дОМ пОСТОяННОгО TOKA | 1977 |
|
SU803096A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ | 1971 |
|
SU301397A1 |
| Вентильный электродвигатель | 1984 |
|
SU1267545A1 |
Изобретение относится к электротехнике, в частности к электроприводу, и может быть использовано в металлургической промышленности, например, для привода мостовых и пор-тальных кранов. Изобретение позволяет -повысить КПД, коэффициент мощности и надежности многодвигательного привода путем перевода системы на синхронную работу более двух двигателей. Благодаря реализации режима непрерывного тока якорной цепи электродвигателей обеспечивается уменьшение потерь мощности в силовых вентилях и силовых цепях как постоянного, так и переменного тока, улучшается форма тока, потребляемого из питающей сети. Устройство реализует измерение углового положения валов электродвигателей, сравнение полученных значений между собой и регулирование тока якоря опережающего двигателя в функции заданного рассогласования, при этом в момент уменьшения углового рассогласования между валами до заданного значения обеспечивается измерение напряжения из якорных электродвигателей и выделение из них наименьшего с последующим регулированием напряжения источника питания и регулирования напряжения на якоре опережающего двигателя с последующим восстановлением напряжения источника питания. 2 ил. с $ СП N5 00
II II ||
ft tf U If
030С
I I } fPUZ.f
(Риг.2
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
