Изобретение относится к автоматизированным электроприводам постоянного тока и может быть использовано . для управления подъемником с бобинным органом навивки и плоским резинотросовым канатом или бицилиндроконическим органом навивки и стальным круглым канатом.
Известен электропривод подъемной машины, который состоит из соединенного с якорной цепью двигателя нереверсивного вентильного преобразователя, в канал управления которого включены блок регулятора скорости, переключанцее устройство, регулятор производной тока и регулятор тока, и реверсивного вентильного преобразователя, питающего обмотку возбуждения двигателя, в канал управления которого включены регулятор тока возбуждения и согласующий усилитель, причем вход последнего соединен с выходом регулятора скорости ГП .,
Однако при использовании известного электропривода для подъемника с пе ременными радиусами навивки происходит увеличенное потребление реактивной энеогии приводом не только в периоды-пуска и торможения сосуда, находящегося
на большем радиусе навивки, но и во время установившегося его движения. Дополнительное потребление реактивной энергии объясняется повышением , диапазоном регулирования угловой скорости за счет постоянно изменяющихся радиусов навивки, это приводит к снижению средневзвешенного коэффициента мощности вентильного привода,
10 что в условиях эксплуатации мощного привода недопустимо. Кроме того, на пониженных скоростях, а также при недогрузке скипа двигатель работает с потоком возбуждения, величина ко15торого меньше номинального значения.
Эффективным способом улучшения энергетических характеристик привода подъемных машин с переменными радиусами навивки является применение
20 метода двухзонного регулирования.
Наиболее близок к предлагаемому электропривод подъемной машины с переменными радиусами навивки канатов, содержащий электродвигатель постоян25ного тока с независимым возбуждением, якорь которого подключен к нереверсивному вентильному преобразователи, в цепь управленич которого последо- вательно включены блок задания ско30рости и регулятор скорости, а также
регулятор тока, вход обратной связи ,; которого соединен с датчиком тока / якоря, обмотка возбуждения электродвигателя подсоединена к реверсивному вентильному преобразователю, в цепь управления которого последовательно включены регулятор ЭДС и регулятор тока возбуждения, входы обратной связи которых соединены соответственно с датчиком ЭДС и датчиком тока возбуждения, кроме того, устройство содержит два переключакмдих устройства, первый из которых включен между регулятором ЭДС и датчиком ЭДС, и датчик скорости t21.
Для обеспечения работоспособности схемы в нее введен блок логики, который управляется функцией выходных сигналов регулятора ЭДС и датчика состояния тиристоров,т.е.в схему системы регулировани с жестким управлением вводится логическое устройство, это приводит к понижению точности и надежности электропривода и усложняет процесс регулирования, что недопустимо в высокопроизводительных подъемных установках производительностью до 20 млн,т. в год. .. Кроме того. Для. оптимального по быстродействию протекания процесса реверса тока возбуждения требуется значительная по величине форсировка напряжения возбуждения, а практически устанавливается 3-4 кратная. Поэтому якорной ток двигателя изменяется значительно быстрее в переходных режимах, чем ток возбуждения двигателя. При смене знака регулятора скорости, смене знака задания момента и тока возбуждения двигателя, например, во время работы в двигательном режиме и подачи- команды на торможение, ток возбуждения дви-. гателя начинает реверсироваться со скоростью, определяемой запасом по напряжению реверсивного вентильного преобразователя, а знак задания тока якоря становится отрицательным на то время, пока ток возбуждения не сменит зиак. Отрицательное задание якорного тока обеспечивает быстрое обнуление якорного тока и запирание нереверсивного вентильного преобразователя. В это время неуправляем и его скорость изменяется под действием статического момента, т.е.электродвигатель находится в режиме свободного выбега, это приводит к рассогласованию мезвду заданным и действительными значениями скорости, что йосле окончания бестоковой паузы приводит к толчкам тока якоря и появлению колебаний в электромеханической системе. Кроме того, при наличии пульсаций напряжения тахогенератора на пониженнБП4 скоростях появляются -ложные реверсы возбуищения электродвигателя.
Цель изобретения - увеличение плавности отработки заданной тахограм1«а движения путем исключения бестоковой паузы при реверсе потока возбуждения и устранение колебаний „ подъемных сосудов.
Указанная цель достигается тем, что в электропривод дополнительно введень блок выделения модуля, регулйтор производной тока, дискриминатор, дополнительный датчик скорости и согласующий усилитель, при этом вход регулятора производной тока соединен с выходом регулятора скорости, блок выделения модуля включен между выходом регулятора производной
S тока и входом регулятора тока якоря, причем вход обратной связи регулятора производной тока соединен с датчиком тока якоря через второй переключакядий блок, управляищий вход
0 которого соединен с выходом регулятора производной тока, входы дискриминатора подключены к обоим датчикам скорости движения подъемных сосудов, а его выход соединен со входом
д обратной связи регулятора скорости, задающий; вход регулятора ЭДС через - согласукедий усилитель подключен к выходу регулятора производной тока, а управлякн Щй вход первого переключающего элемента соединен с выходом блока задания скорости.
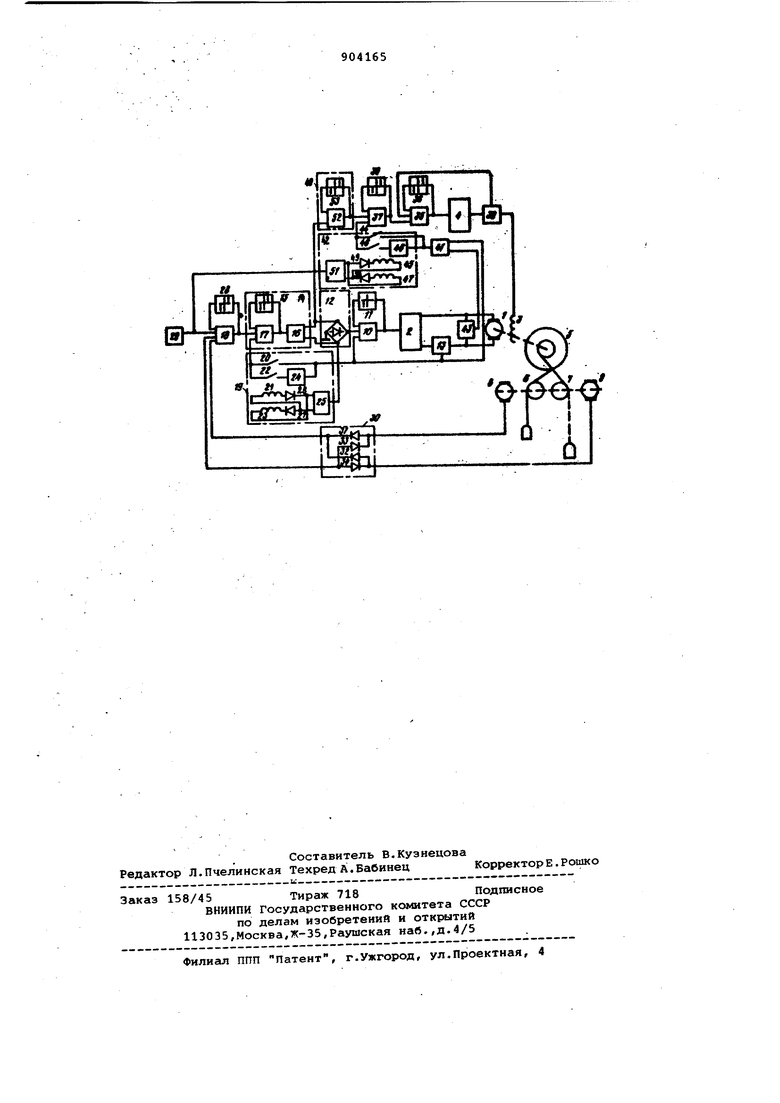
На чертеже изображена, функциональная схема электропривода.
Якорь 1 двигателя постоянного тока
« включен на переверсивный вентильный
преобразователь 2. Обмотка 3 возбуждения электродвигателя питается от реверсивного вентильного преобразователя 4. Вал двигателя механически соединеи с валом 5 подъемной маишны,
0 тяговые органы которой отключаются шкивами б и 7. Датчики 8 и 9 скорости механически связаны с отклоняюиими шкивакш.
5 Регулятор 10 тока имеет в цепи обратной связи ограничивающий блок 11. На вход регулятора тока поступают три сигнала : сигналы задания от блока 12 выделения модуля, и от ограничиQ вакявего блока 11, задающего максимальную величину выпрямленного напряжения на выходе преобразователя 2 и сигнал обратной связи по току якоря ,от датчика тока 19. Блок выделения
. юдyля представляет собой диодный выпрямитель. Вход его соединен с выходом регулятора 14 проц,зводной тока.
Регулятор производной тока состоит из ограничиааюцего блока 15 и интегрируквдего 16 и пропорционального 17 усилителей. На вход усилителя 17 поступают и сигнала: задания от регулятора 18 скорости, от ограничиванхаего блока 15, определяющего скоS рость изменения тока якоря, и от переключающе о блока 19. Переключающий блок 19 соединяет датчик 13 тока и вход обратной связи через контакт 20 реле 21 нли через контакт 22 реле 23 и инвертор 24. Реле 21 и 23 включены на выход усилителя 25 мощности через диоды 26 и 27. Вход усилителя 25 14ОЩНОСТИ соединен с выходом регулятора 14 производной тока. . В цепь обратной связи регулягора 118 скорости включен ограничивеиоций блок 28. На вход регулятора 18 скорости включен ограничиваиций блок 28. На вход регулятора 18 скорости поступают четыре сигнала: эадагавнй от блока 29 эгшания скорости, от ограничивакицего блока 28 и два сигнала от дискримжатора 30. В устройстве Л1 едусм1 треио измерение линейных скоростей к«а(дой ветви подъемной машины датчйкакш .скорости 8 и 9. Сигналы от датчиков скорости поступают на дкскримииатор 30, где они сравниваются, и больший из них подается на вход обратной связи регулятсчра 18 скорости.С помснфью диодов 31 и 32выделяется наибольшее напряжение ооложительной, а с помощью диодов 33и 34 - отрнцательиой полярности. Регулятор 15 возбуждения содержит в цепи обратной связн ограинчиваМщий блок 36. На вход регулятора 35 возбуждения поступают три сигнала: задания от регулятора 37 ЭДС, ограничивакхкего блока 36 и обратной связи от датчика 38 тока возбуждеИИЯ. Регулятор 37 ЭДС в цепи обратной связи имеет ограничивающий блок 39. На вход регулятора 37 ЭДС поступгиот три сигнгша: задающий от согласующего усилителя 4-0, от Ограничивающего блока 39, зада эдего номинальное значение тока возбуждения, и обратной связи от датчика 41 ЭДС пере1иазчающий блок 42. На вход дат.чика 41 ЭДС поступают сигна1лы от датчика 13 тока и от дат,чика 43 напряжения. Переключающий блок соединяет выход датчика 41 ЭДС со входом регулятора 37 непосредственно контактом 44 реле 45 или через контакт 46 реле 47 и инвертор 48. Ре ле 45 и 47 через разделительиые диод 49 и 50 подсоединены к усилителю 51 мощности с большим коэффи.циентом усиления, вход которого подсоединён к выходу блока 29 задания скорости. Согласующий усилитель состоит из усилителя 52 и ограничивающего блока 53. На вход усилителя 52 постулгиот два сигнала: задающий от регулятора 14 производной тока и от ограничивающго блока 53, который задает номинешьиые значения ЭДС двигателя . Управлпне предлагаемым электрюприводом осуществляется в соответствии с существующим способом рёгулирования скорости движения сосудов цвухконцевой подъемной установки с переменными радиусами навивки, при котором, с целью уменьшения,времени подъема, измеряются Линейные скорости движения каждого из сосудов, выделяется большая из них, управляющий сигнал формируется тфопорционально разности заданной и наибольшей линейной скорости движения сосудов , т.е. управление производится путем контрюлирования ускорения и скорости сосуда, находящегося на большем радиусе навивки. Система работает следукщнм обрагз. При отсутствии сигйала на выходе блока 29 задания скорости якорная цепь и обмотка возбуждения двигателя обесточены. Задающий снгнгш на якорный ток и поток возбуждения пояьля-ется при нгшнчни натфяжения на выходе блока 29 задания скорости и поступает от регулятора 18 скорости через регулятор 14 производиой тока на контур регулирования ЭДС двигателя и контур регулирования якорного тойа. Причем на первый контур он поступает через согласующий усилитель-40, а на второй - через блок 12 выделения модуля. При работе, на сксфости, ниже v ноиегнальной, контур регулирования ЭДС разомкнут, поэтому темп эгшанвшх сигналов на контур якорного тока н тока возбуждения определяется пос- . тоянной времени иитеп ирования регулятора 14 производной тока и коэф фициентом усиления согласующего усиляггеля 40, так как постоянная времени (интегрирования регулятора 37 ЭДС значительно менглю постоянной временя регулятсфа 14 производной тока, Коэф-. фициент усиления согласующего усилителя 40 устанавливается в соответствии со статической характеристикой/ согласно которой в статическом режит ме при наличии сигнала (адания на номинальный ток возбуждения двигателя поддерживается половина HoheiHetHb- ного якорного тока двигателя. После появления напряжения на выходе блока 29 задания скорости и регулятора 14 производной тока через усилители мощности 25 и 51 срабатывают реле 21 23, 45 и 47, которые устанавливают отрицательную, обратную связь на регулятор 14 производной тока и регулятор 37 ЭДС. В зтот период регулятор 37 ЭДС работает как згодающее устройство на номинальный ток возбуждения. После достижения номинального тока возбуждения н заданной величины якорного тока происходит разгон сосуда с номинальным потоком возбуждения. После разгона сосуда, находящегося на большем радиусе до максимальной скорости, регулятор 37 ЭДС переходит в режим регулирования ЭДС двигателя.
поддержание линейной скорости сосуда при переменных радиусах происходит за счет изменения магнитного потока возбуждения при малоизменяющемся (близком к номинальному значению ) напряжении питания якорной цепи. При смене знака выходного напряжения регулятора 18 скорости, что происходит
в период реверса момента, .развиваемого двигателем, например, при изненении знака статического момента на валу двигателя или в период торможе ния в генераторном режиме, согласующий усилитель 40 переводит регулятор 37 ЭДС из режима контролирования ЭДС двигателя в режим задания скорости изменения тока возбуждения. В этом случае якорной ток двигателя падает до половины номинального значения при постоянном токе возбуждения, а затем начинает уменьшаться и ток возбуждения двигателя, причем нулевого значения ток возбуждения и якорный ток достигают одновременно. В этот момент происходит переключение реле 21 и 23, ранее работающее - отключается, а другое - подключается. За время изменения якорного тока двигателя от Зсщанного до нулевого значения, а потом опять до заданного, ток возбуждения изменяет свой знак на противоположный.При этом исключается бедтоковая пауза якорной цепи - неуправляемый режим во время реверса знака потока возбуждения. Вращающий момент, пропорциональный произведению якорного тока и тока возбуждения, уменьшается линейно, а с момента начала убывания тока возбуждения приближается по параболе к нулевому значению. Нарастание момента в противоположном направлении происходит симметрично. Переход из тормозного режима в двигательный аналогичен.
Использование предлагаемого электропривода подъемной машины с переменными навивками увеличивает плавность отработки заданной тахограммы движения путем исключения бесштоковой паузы в моменты реверса потока возбуждения и устранения колебаний подъемных сосудов.
Формула изобретения
Электропривод для подъемной машины с переменными радиусами навивки
канатов, содержащий электродвигатель постоянного тока с независимыми возбуждением, якорь которого подключен к нереверсивному вентильному преобразователю, в цепь управления которого последовательно включены блок задания скорости и регулятор скорости, а также регулятор тока, вход обратной связи которого соединен с датчиком тока якоря, а обмотка воз-
буждения электродвигателя подсоединена к реверсивному вентильному преобразователю, в цепь управления которого последовательно включены регулятор ЭДС и регулятор тока возбуждения, входы обратной связи которых
5 соединены соответственно с датчиком ЭДС и датчиком тока возбуждения, кроме того, два переключающих блока, первый из которых включен между регулятором ЭДС и датчиком ЭДС, и датчик
0 скорости, отли-чающи йся тем, что, с целью увеличения плавности отработки заданной тахограммы движения путем исключения бестоковой паузы при реверсе потока возбуждения
5 и устранения колебаний подъемных сосудов, в него введены блок выделения модуля, регулятор производной тока, дискриминатор, дополнительный датчик скорости и согласующий усилитель,
и при этом вход регулятора производной тока соединен с выходом регулятора скорости, блок выделения модуля включен между выходом регулятора производной тока и входом регулятора тока якоря, причем вход обратной связи регулятора производной тока соединен с датчиком тока якоря через второй переключаркций блок, управляющий вход которого соединен с выходом регулятора производной тока, входы
0 дискриминатора подключены к обоим датчикам скорости движения подъемных сосудов, а его выход соединен со входом обратной связи регулятора скорости, задающий вход регулятора
j ЭДС через согласующий усилитель подключен к выходу регулятора производной тока, а управлякяций вход первого переключающего блока соединен с выходом блока задания скорости.
л Источники информации,
принятые во внимание при экспертизе
1. Динкель А.Д. и др. Тиристорный электропривод рудничного подъема. М., Недра, 1977, с.129.
2; Авторское свидетельство СССР
.5 № 692023, кл. Н 02 Р 5/06, 1979.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Электропривод подъемной машины | 1981 |
|
SU996317A2 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1975 |
|
SU752711A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1344711A1 |