Изобретения относятся к ракетно-космической технике, в частности к устройствам двигательных установок космических аппаратов, а именно геостационарных спутников связи (далее КА), используемых для ориентации спутников в пространстве за счет создания управляющих моментов вокруг центра масс КА и для коррекции орбиты, т.е. изменения положения центра масс КА.
Примером двигательной установки геостационарного спутника связи может служить двигательная установка КА "Ямал-100" (см., например, журнал "Новости космонавтики", №11 (238) за 2002 г., с.44-45). На этом аппарате установлена двигательная установка, которая использует одни и те же двигатели как для коррекции орбиты, так и для создания управляющих моментов вокруг центра масс. Двигательная установка КА "Ямал-100" имеет в своем составе восемь неподвижных двигателей малой тяги (электроракетные двигатели СПД-70) и 12 газовых сопел. Газовые сопла имеют низкий удельный импульс и используются только до задействования электроракетных двигателей и в аварийных ситуациях. Восемь двигателей СПД-70 обеспечивают коррекцию орбиты КА и создание требуемых моментов относительно центра масс КА.
Недостатками этой двигательной установки является большое количество двигателей, а также то, что для выполнения любой динамической операции одновременно задействуются два двигателя из восьми или необходимо часто переключать двигатели в соответствующей паре, отсутствует возможность изменять направление суммарного вектора тяги двигательной установки.
Известно устройство двигательной установки КА, содержащее размещенный на штанге, шарнирно прикрепляемой к корпусу КА, двигатель малой тяги и элементы пневмосистемы двигательной установки (см. патент РФ №2021170, кл. B 64 G 1/00, от 10.06.91 г.).
Однако у такого устройства двигательной установки имеются недостатки, например для управления ориентацией КА необходимо задействовать несколько двигателей, создаваемый момент от двигателя можно изменять только относительно одной оси.
Известно также устройство двигательной установки КА, содержащее двигатель малой тяги, размещенный в двухосном подвесе на штанге, шарнирно прикрепленной к корпусу космического аппарата, и элементы пневмосистемы двигательной установки (см. патент US 6565043 A (THE BOEING CO); 20.05.2003, кл. 244/169)
Однако указанное устройство двигательной установки не позволяет решать задачу поддержания КА в точке стояния с использованием только одного подобного устройства: например, необходимо одно устройство для поддержания точки стояния в направлении «север-юг» и второе устройство для поддержания точки стояния в направлении «запад-восток». Также указанное устройство позволяет направлять вектор тяги двигателя через центр масс только в двух определенных положениях штанги относительно корпуса КА: например, в «северном» и «южном». Указанное устройство двигательной установки также не предусматривает мер для уменьшения изменения положения центра масс КА при перемещении штанги из одного крайнего положения в другое, что потребует усложнения устройства стабилизации и контроля ориентации КА.
Задачей настоящих изобретений является создание устройства двигательной установки, которое позволяет достичь технического результата в виде создания корректирующего импульса при работе одного двигателя малой тяги вдоль любого направления, необходимого для поддержания точки стояния КА на орбите, и создания необходимого управляющего момента вокруг центра масс КА для управлением ориентацией КА, в том числе при выдаче корректирующего импульса.
Решение этой задачи достигается тем, что устройство двигательной установки космического аппарата содержит шарнирно прикрепленную к корпусу космического аппарата штангу, размещенный в двухосном подвесе на штанге двигатель малой тяги и элементы пневмосистемы двигательной установки, при этом в соответствии с изобретением:
- двигатель малой тяги установлен на одном конце, элементы пневмосистемы двигательной установки, включая баллон с рабочим телом, установлены на другом конце штанги (такое расположение позволяет лучше сбалансировать штангу, уменьшить изменения номинального положения центра масс космического аппарата при повороте штанги относительно корпуса космического аппарата);
- шарнир крепления штанги к корпусу космического аппарата расположен между двигателем малой тяги и элементами пневмосистем и выполнен с возможностью вращения штанги относительно корпуса космического аппарата на 360 градусов, обеспечивая возможность выдачи корректирующего импульса не только вдоль одного направления, например «север-юг», но и поперек первого направления, например вдоль направления «запад-восток» (это качество позволяет одним устройством обеспечивать поддержание точки стояния КА по всем требуемым направлениям);
- двухосный подвес выполнен с возможностью независимого вращения двигателя малой тяги относительно штанги по двум взаимно перпендикулярным осям на 90 градусов вокруг каждой оси.
При этом максимальное отклонение двигателя малой тяги относительно номинального положения относительно штанги по каждой из осей двухосного подвеса осуществляется на угол 45 градусов в обе стороны. Номинальное положение двигателя малой тяги относительно штанги соответствует прохождению номинального вектора тяги двигателя малой тяги через номинальный центр масс космического аппарата хотя бы при одном положении штанги относительно корпуса космического аппарата. Направление оси и размещение шарнира крепления штанги к корпусу космического аппарата относительно корпуса космического аппарата обеспечивает при любом положении штанги относительно корпуса космического аппарата и номинальном положении двигателя малой тяги относительно штанги отклонение номинального направления вектора тяги двигателя малой тяги от направления на номинальный центр масс космического аппарата на угол до 40 градусов.
Установка двигателя малой тяги в двухосном подвесе с указанными номинальным положением относительно штанги, возможными отклонениями относительно штанги и указанным положением точки крепления и направления оси вращения штанги относительно корпуса космического аппарата и его центра масс обеспечивает в любом положении штанги относительно корпуса КА возможность выдачи импульса тяги, направленного как через центр масс КА (для выдачи корректирующего импульса), так и с необходимым «промахом» для создания управляющего момента вокруг центра масс КА (для разгрузки двигателей-маховиков в системе управления ориентацией КА), в том числе и на фоне выдачи корректирующего импульса.
Кроме того, рядом с двигателем малой тяги дополнительно установлен резервный двигатель малой тяги в одном и том же двухосном подвесе двигателя малой тяги на той же штанге, параллельно основному двигателю малой тяги.
Кроме того, элементы пневмосистемы, включая баллон с рабочим телом, совместно с двигателем малой тяги связаны с системой преобразования и управления, размещаемой в корпусе космического аппарата.
Решение вышеупомянутой задачи также достигается тем, что устройство двигательной установки космического аппарата содержит блок двигателей малой тяги, размещенный в двухосном подвесе на штанге, шарнирно прикрепленной к корпусу космического аппарата, и элементы пневмосистемы двигательной установки, при этом в соответствии с изобретением:
- блок двигателей малой тяги установлен на одном конце, элементы пневмосистемы двигательной установки, включая баллон с рабочим телом, установлены на другом конце штанги;
- шарнир крепления штанги к корпусу космического аппарата расположен между блоком двигателей малой тяги и элементами пневмосистем и выполнен с возможностью вращения штанги относительно корпуса космического аппарата на 360 градусов, обеспечивая возможность выдачи корректирующего импульса не только вдоль одного направления, например «север-юг», но и поперек первого направления, например вдоль направления «запад-восток»; это качество позволяет одним устройством обеспечивать поддержание точки стояния КА по всем требуемым направлениям;
- двухосный подвес выполнен с возможностью независимого вращения блока двигателей малой тяги относительно штанги по двум взаимно перпендикулярным осям на 90 градусов вокруг каждой оси.
При этом максимальное отклонение блока двигателей малой тяги относительно номинального положения относительно штанги по каждой из осей двухосного подвеса осуществляется на угол 45 градусов в обе стороны. Номинальное положение блока двигателей малой тяги относительно штанги соответствует прохождению номинального суммарного вектора тяги блока двигателей малой тяги через номинальный центр масс космического аппарата хотя бы при одном положении штанги относительно корпуса космического аппарата. Направление оси и размещение шарнира крепления штанги к корпусу космического аппарата относительно корпуса космического аппарата обеспечивает при любом положении штанги относительно корпуса космического аппарата и номинальном положении блока двигателей малой тяги относительно штанги отклонение номинального направления суммарного вектора тяги блока двигателей малой тяги от направления на номинальный центр масс космического аппарата на угол до 40 градусов.
Далее данные изобретения поясняются подробно с использованием схемных чертежей (фигур), где на фиг.1 показано предложенное устройство по первому варианту, а на фиг.2 - по второму варианту.
Устройство двигательной установки космического аппарата содержит двигатель малой тяги 1, установленный в двухосном подвесе 2 относительно штанги 3. Штанга сама прикреплена к корпусу космического аппарата 4 с центром масс 5 с помощью шарнира 6. Штанга выполнена Г-образной формы, на одном конце которой закреплен в двухосном подвесе крепления (на двигательной раме) двигатель малой тяги, а на другом конце штанги смонтированы элементы пневмосистемы, включая баллон с рабочим телом 7 для двигателя малой тяги. Двухосный подвес двигателя представляет собой два шарнира 8 и 9, установленных взаимно перпендикулярно таким образом, что они реализуют относительно штанги аналог карданного подвеса для двигательной рамы, на которой устанавливаются двигатели малой тяги.
При этом в целом относительно корпуса космического аппарата получаются три оси вращения, реализованные с помощью трех шарниров, причем первым шарниром является шарнир 6, позволяющий вращать штангу на 360° относительно корпуса космического аппарата, а второй и третий шарниры, составляющие двухосный подвес, размещены на одном из концов штанги таким образом, что они реализуют относительно штанги независимое вращение двигателя малой тяги по двум взаимно перпендикулярным осям на 90° относительно каждой оси. Вращение в шарнирах 8 и 9 осуществляется на угол до 45 градусов в обе стороны относительно номинального положения этих шарниров.
Для резервирования отказа двигателя малой тяги целесообразно на двигательной раме устанавливать два двигателя: один основной и один резервный, аварийный параллельно основному двигателю малой тяги, при этом штатно (при отсутствии аварии) будет работать только один двигатель.
Кроме этого на штанге между двигателями и баком установлены четыре газовых сопла. Элементы пневмосистемы, включая баллон с рабочим телом, совместно с двигателями малой тяги и газовыми соплами, связаны с системой преобразования и управления, размещаемой в корпусе космического аппарата.
По второму варианту на двигательной раме устанавливается не один основной рабочий двигатель малой тяги, а блок нескольких основных двигателей малой тяги, не считая аварийного, резервного.
Работа устройства двигательной установки космического аппарата осуществляется следующим образом.
Для коррекции геостационарной орбиты выдают импульсы тяги вдоль двух взаимно перпендикулярных осей - всего в четыре направления относительно центра масс КА. При этом с помощью шарниров вектор тяги двигателя направляют точно через центр масс КА, чтобы исключить возмущения от работы двигателей.
Например, при выдаче корректирующего импульса в северном направлении для поддержания широты точки стояния КА штанга поворачивается относительно корпуса КА в такое положение, когда конец штанги с двухосевым подвесом направлен на юг. Затем с помощью двухосевого подвеса тяга двигателя направляется через центр масс КА и производится выдача корректирующего импульса.
Для создания управляющих моментов вокруг центра масс суммарный вектор тяги с помощью шарниров направляют по линии, не проходящей через центр масс, т.е. мимо центра масс. При этом выбирается требуемая величина "промаха", чтобы минимизировать расход рабочего тела. Устройство ДУ создает управляющий момент любого знака относительно любой из трех осей КА.
При этом и создание управляющих моментов и создание импульсов тяги для коррекции производят ТОЛЬКО одним рабочим двигателем малой тяги. (второй - резервный включают только в случае аварии или отказа основного двигателя малой тяги).
По второму варианту создание управляющих моментов и создание импульсов тяги производят включая одновременно блок из двух или более рабочих двигателей малой тяги (оставляя опять резервный двигатель невключенным).
При работе устройств двигательной установки КА как по первому варианту, так и по второму варианту, по сравнению с двигательной установкой с неподвижно установленными двигателями или с несколькими подвижными двигателями, предлагаемое устройство двигательной установки для геостационарных спутников связи имеет следующие преимущества:
- малое число двигателей (достаточно хотя бы одного двигателя малой тяги (например, СПД-70) позволяет уменьшить как массу и стоимость ДУ КА, так и массу аппаратуры электропитания и управления ДУ;
- возможность направлять вектор тяги вдоль требуемых направлений для поддержания точки стояния КА как по широте, так и по долготе;
- возможность изменения направления вектора тяги в процессе работы двигательной установки (возможность направлять тягу двигателя либо в центр масс, либо создавать нужный управляющий момент) позволяет свести к минимуму возмущения от работы двигателя, что минимизирует запас (массу) дополнительного топлива для парирования этих возмущений;
- сбалансированность штанги с расположенными на ней элементами ДУ относительно поворотного механизма обеспечивает уменьшение изменения положения центра масс КА при повороте штанги относительно корпуса КА;
- выполнение в виде отдельного модуля, который можно автономно собирать и проводить цикл предполетных проверок, а также целиком устанавливать и снимать без изменения или разборки другой конструкции космического аппарата.
Кроме указанных выше преимуществ, получаемых обоими вариантами при работе устройства двигательной установки, по первому варианту имеется преимущество в том, что необходимость включать только один двигатель снижает требования к системе электроснабжения КА по необходимой мощности питания двигательной установки. Например, для одного СПД-70 необходимо около 750 Вт электроэнергии вместо 1500 Вт для двух СПД-70. Преимущество по второму варианту устройства заключается в том, что при работе блоком из нескольких двигателей, установленных на одной двигательной раме и включаемых одновременно, уменьшается время работы двигательной установки при выдаче импульса коррекции и/или разгрузке двигателей-маховиков.
Устройство двигательной установки по второму варианту может и не содержать дополнительного, аварийного двигателя помимо двух основных рабочих двигателей малой тяги. При этом при выходе из строя (авария) одного из рабочих двигателей устройство двигательной установки переходит на работу по первому варианту.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления вектором тяги плазменного двигателя (варианты) и способ управления вектором тяги плазменного двигателя | 2015 |
|
RU2644810C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2309876C1 |
| СПОСОБ БЕСКОНТАКТНОЙ ТРАНСПОРТИРОВКИ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2568960C1 |
| Космический аппарат для доставки полезного груза на космическое тело с малым гравитационным полем | 2020 |
|
RU2758656C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2486111C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2496688C2 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| ОБЪЕДИНЕННАЯ ЭЛЕКТРОРЕАКТИВНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА КОСМИЧЕСКОГО АППАРАТА, СПОСОБ СОЗДАНИЯ УПРАВЛЯЮЩИХ МОМЕНТОВ ПО КАНАЛАМ ТАНГАЖА И РЫСКАНИЯ КОСМИЧЕСКОГО АППАРАТА С УКАЗАННОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И ТРЕХКАНАЛЬНЫЙ ЭЛЕКТРОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2040445C1 |
| СПОСОБ РАЗМЕЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2480384C2 |

Изобретения относятся к двигательным системам космических аппаратов (КА), преимущественно геостационарных спутников связи, и могут использоваться для ориентации спутника и коррекции его орбиты. Предлагаемое устройство содержит двигатель (или блок двигателей) малой тяги, размещенный в двухосном подвесе на штанге, а также элементы пневмосистемы двигательной установки. Штанга шарнирно прикреплена к корпусу КА. Двигатель (или блок двигателей) установлен на одном конце штанги, а элементы пневмосистемы - на другом конце штанги. Шарнир крепления штанги к корпусу КА расположен между указанными двигателем (или блоком) и элементами пневмосистемы. Двухосный подвес выполнен с возможностью независимого вращения двигателя (или блока) относительно штанги по двум взаимно перпендикулярным осям на 90° вокруг каждой оси. Шарнир крепления штанги выполнен с возможностью вращения штанги относительно корпуса КА на 360°. Техническим результатом изобретений является создание корректирующего импульса при работе одного двигателя малой тяги (или их блока) вдоль любого направления, необходимого для поддержания точки стояния КА на орбите, и создания (в т.ч. одновременно с этим) необходимого управляющего момента вокруг центра масс КА для управления его ориентацией. 2 н. и 2 з.п. ф-лы, 2 ил.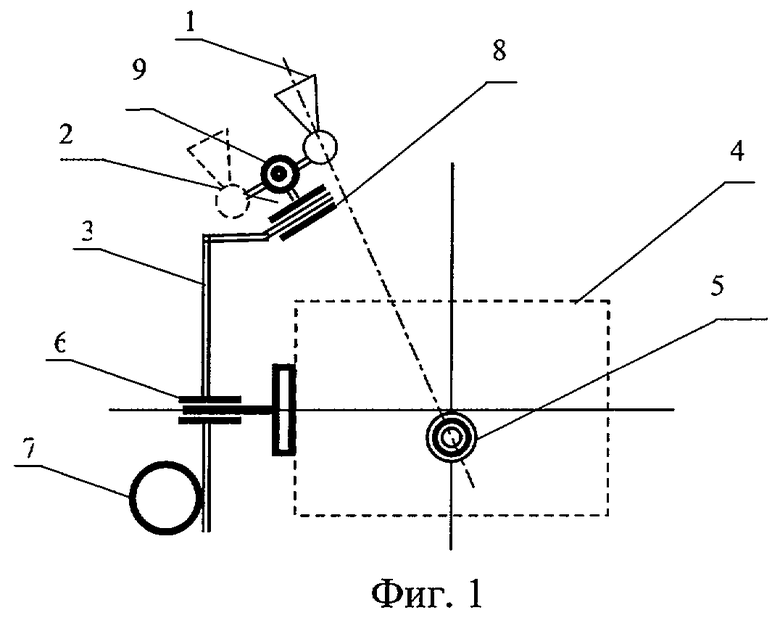
| US 6565043 А, 20.05.2003 | |||
| КОСМИЧЕСКАЯ ОПТИЧЕСКАЯ ЛИНИЯ СВЯЗИ МЕЖДУ ДВУМЯ ОБЪЕКТАМИ | 1997 |
|
RU2106749C1 |
| US 6032904 A, 07.03.2000 | |||
| US 4955559 A, 11.09.1990. | |||

